You might also like
- LM 297Document12 pagesLM 297Monika JhaNo ratings yet
- L297Document12 pagesL297wtn2013No ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
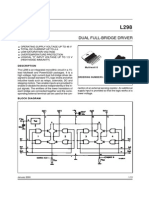
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
- LS7290 Stepper Motor ControlDocument12 pagesLS7290 Stepper Motor ControlOlger NavarroNo ratings yet
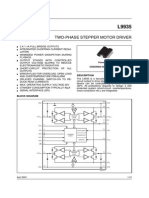
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
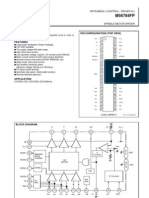
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocument14 pagesLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNo ratings yet
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- Mach Cong Suat Cau H - Lmd18200Document14 pagesMach Cong Suat Cau H - Lmd18200hieuhuech1No ratings yet
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- LMD18201 3A, 55V H-Bridge: General DescriptionDocument8 pagesLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoNo ratings yet
- Tda 2593Document6 pagesTda 2593Luis Arturo Leiva MonjarasNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- LMD 18200Document14 pagesLMD 18200Itzamary Romero SosaNo ratings yet
- Sla7024m PDFDocument12 pagesSla7024m PDFEJASMANYNo ratings yet
- A4954 DatasheetDocument9 pagesA4954 DatasheetAngly1959No ratings yet
- Datasheet PDFDocument15 pagesDatasheet PDFperro sNo ratings yet
- Sla7024 26 29mDocument12 pagesSla7024 26 29mbashtavNo ratings yet
- U 211 B 2Document21 pagesU 211 B 2tavobeckerNo ratings yet
- Azbh 12 A 8Document8 pagesAzbh 12 A 8ElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
- STRW6252Document15 pagesSTRW6252miltoncgNo ratings yet
- Sla7024m (Motor Driver)Document13 pagesSla7024m (Motor Driver)Franklin Miranda RoblesNo ratings yet
- lm2917 NDocument24 pageslm2917 NAlejandro RojoNo ratings yet
- Open Loop Phase Control Circuit: DescriptionDocument7 pagesOpen Loop Phase Control Circuit: DescriptionMuhammad NajibNo ratings yet
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsDocument28 pagesLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84No ratings yet
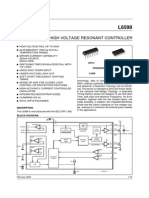
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
- DRV 8811Document22 pagesDRV 8811nelson_loboNo ratings yet
- En CD00000085Document16 pagesEn CD00000085amijoski6051No ratings yet
- Data Sheet L298 PDFDocument13 pagesData Sheet L298 PDFbaymax love spideyNo ratings yet
- 25 A 20Document9 pages25 A 20s_barriosNo ratings yet
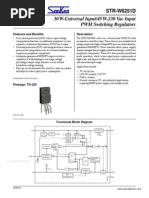
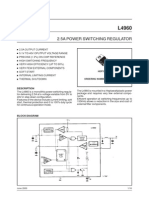
- 2.5A Power Switching Regulator: DescriptionDocument16 pages2.5A Power Switching Regulator: Descriptionbikram9830No ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Amc 12a8 SpecsheetDocument9 pagesAmc 12a8 SpecsheetElectromateNo ratings yet
- L6219DSDocument12 pagesL6219DSaminotepNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument11 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- 110 Integrated Circuit Projects for the Home ConstructorFrom Everand110 Integrated Circuit Projects for the Home ConstructorRating: 4.5 out of 5 stars4.5/5 (2)
- ATmega 128Document386 pagesATmega 128Gigi TyireanNo ratings yet
- EAGLEDocument314 pagesEAGLEGigi Tyirean100% (1)
- Add a DS1307 RTC clock to your AVR microcontrollerDocument14 pagesAdd a DS1307 RTC clock to your AVR microcontrolleriburolNo ratings yet
- Printed Circuit Board Layout For Improved Electromagnetic CompatibilityDocument14 pagesPrinted Circuit Board Layout For Improved Electromagnetic CompatibilityGeroldo 'Rollie' L. QuerijeroNo ratings yet
- EAGLEDocument314 pagesEAGLEGigi Tyirean100% (1)
- ILFA-The Future of The PCBDocument28 pagesILFA-The Future of The PCBGigi TyireanNo ratings yet
- Atmega PrintDocument1 pageAtmega PrintGigi TyireanNo ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
- Tranzistoare Si Surse de Curent: Figura 1Document21 pagesTranzistoare Si Surse de Curent: Figura 1Gigi TyireanNo ratings yet
- Valeriu Iorga Programare in C, C++: Culegere de ProblemeDocument128 pagesValeriu Iorga Programare in C, C++: Culegere de ProblemeBlackFlame40No ratings yet
- CURS MateDocument0 pagesCURS MateGigi TyireanNo ratings yet
- PCB Design ConsiderationsDocument3 pagesPCB Design ConsiderationsGigi TyireanNo ratings yet