You might also like
- Bipartite Graphs and Problem SolvingDocument8 pagesBipartite Graphs and Problem SolvingNikita MishraNo ratings yet
- Adjacency Matrices of Some Directional Paths and StarsDocument7 pagesAdjacency Matrices of Some Directional Paths and StarsIoan DegauNo ratings yet
- Graph 032001Document16 pagesGraph 032001Hulk ManNo ratings yet
- T-79 4202 Solutions 4Document4 pagesT-79 4202 Solutions 4bobopowerNo ratings yet
- On The Spectrum of Linear Dependence Graph of A Finite Dimensional Vector SpaceDocument17 pagesOn The Spectrum of Linear Dependence Graph of A Finite Dimensional Vector SpaceNandita PandeyNo ratings yet
- Graph Theory PDFDocument213 pagesGraph Theory PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Lec 2Document7 pagesLec 2xigon53558No ratings yet
- Math 7400 Graph Theory: Bogdan OporowskiDocument213 pagesMath 7400 Graph Theory: Bogdan OporowskiHalex CastroNo ratings yet
- Mathematical Foundations of Computer Science Lecture OutlineDocument3 pagesMathematical Foundations of Computer Science Lecture OutlineChenyang FangNo ratings yet
- Graph-Theory PDF EbookDocument7 pagesGraph-Theory PDF EbookSudipto RoyNo ratings yet
- Graph Theory MATH20150Document66 pagesGraph Theory MATH20150Sheetal KanelNo ratings yet
- DS - Module 5Document141 pagesDS - Module 5revatikulkarni40No ratings yet
- 2 - Highly Irregular Fuzzy GraphsDocument10 pages2 - Highly Irregular Fuzzy GraphsIOSRjournal0% (1)
- Havel HakimiDocument3 pagesHavel HakimiSwarvanu MeddaNo ratings yet
- 1.1 Planar Graphs: Notes by Nabil H. Mustafa and J Anos PachDocument5 pages1.1 Planar Graphs: Notes by Nabil H. Mustafa and J Anos Pachvanaj123No ratings yet
- Weakly Connected Domination in Graphs Resulting From Some Graph OperationsDocument5 pagesWeakly Connected Domination in Graphs Resulting From Some Graph OperationsElsieNo ratings yet
- Graph Theory NotesDocument49 pagesGraph Theory NotesShyupomen UzNo ratings yet
- Assignment 3: Joseph Sharp Luevano (Sharplue) Tingyu Liang (Liangt19)Document4 pagesAssignment 3: Joseph Sharp Luevano (Sharplue) Tingyu Liang (Liangt19)王乔峪No ratings yet
- Notes GraphDocument9 pagesNotes GraphFurkan memonNo ratings yet
- Graph Terminology PDFDocument9 pagesGraph Terminology PDFPeter BandaNo ratings yet
- Fractional Metric Dimension of Tree and Unicyclic Graph: SciencedirectDocument6 pagesFractional Metric Dimension of Tree and Unicyclic Graph: SciencedirectRuzikaRimadhanyNo ratings yet
- Graph Theory: (Graph Terminology and Handshaking Theorem)Document19 pagesGraph Theory: (Graph Terminology and Handshaking Theorem)vomocem334No ratings yet
- 07 - Chapter 2 MichealDocument19 pages07 - Chapter 2 MichealTamilNo ratings yet
- Unit VDocument77 pagesUnit VDarsh RawatNo ratings yet
- Unit VDocument74 pagesUnit VvishnuNo ratings yet
- GT-7-2connectedGraphs IngDocument3 pagesGT-7-2connectedGraphs IngSemy ZambranoNo ratings yet
- 1.1 Graph TheoryDocument8 pages1.1 Graph TheorySamah Sam BouimaNo ratings yet
- Week 1-2: Graphs and SubgraphsDocument13 pagesWeek 1-2: Graphs and SubgraphsJohn ChanNo ratings yet
- On The Injective Domination of GraphsDocument9 pagesOn The Injective Domination of GraphsRaja Sekar GNo ratings yet
- Theorems On List-Coloring: Dharmaiah Gurram, N.VedavathiDocument5 pagesTheorems On List-Coloring: Dharmaiah Gurram, N.VedavathiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- GT 1 IntroductionDocument4 pagesGT 1 Introductionelgie liwagonNo ratings yet
- UlleryDocument11 pagesUlleryEpic WinNo ratings yet
- Iwoca ProcDocument13 pagesIwoca ProcSagnik SenNo ratings yet
- Hints BOndy PDFDocument45 pagesHints BOndy PDFhmaravilloNo ratings yet
- Graph Algorithms: BFS, DfsDocument8 pagesGraph Algorithms: BFS, DfsAarzoo VarshneyNo ratings yet
- CuspDocument51 pagesCuspAparaNo ratings yet
- Chapter 1Document25 pagesChapter 1FARAH AZURIN MOHD FABLINo ratings yet
- Chordal Linear IcalpDocument12 pagesChordal Linear Icalp赵夏淼No ratings yet
- Chapter4 PsDocument133 pagesChapter4 PsArijit PanigrahyNo ratings yet
- Janne SariDocument5 pagesJanne SariNur Hasnah AdytiawarmanNo ratings yet
- Maximum Order of A Planar Oclique Is 15Document17 pagesMaximum Order of A Planar Oclique Is 15Sagnik SenNo ratings yet
- Graphs and OptimizationDocument20 pagesGraphs and OptimizationAmira ZarglayounNo ratings yet
- Unit 5Document77 pagesUnit 5TANISHA KAPOOR (RA2011027010056)No ratings yet
- Some New Kinds of Connected Domination in Fuzzy GraphsDocument11 pagesSome New Kinds of Connected Domination in Fuzzy GraphsIOSRjournal100% (1)
- Graphs: Dr. Sun Pak KiuDocument52 pagesGraphs: Dr. Sun Pak KiujackaccyouNo ratings yet
- 45 117 1 PBDocument10 pages45 117 1 PBAbdataNo ratings yet
- Cha5 Graph TheoryDocument10 pagesCha5 Graph Theoryham.karimNo ratings yet
- Walks, Trails, Paths, and Cycles:, E, V, E, - . - , E, V I K, The Edge eDocument8 pagesWalks, Trails, Paths, and Cycles:, E, V, E, - . - , E, V I K, The Edge eJKNo ratings yet
- Graph Theory: Introduction. Distance in Graphs. TreesDocument40 pagesGraph Theory: Introduction. Distance in Graphs. TreesRaluca RomanovNo ratings yet
- Midsem SolDocument3 pagesMidsem SolLilia XaNo ratings yet
- On Strong Metric Dimension of Zero-Divisor Graphs of RingsDocument18 pagesOn Strong Metric Dimension of Zero-Divisor Graphs of RingsRaulNo ratings yet
- PDKU - 2000 Chartrand Disc Appl Math Resolvability in Graph and The Metric Dimension GraphDocument15 pagesPDKU - 2000 Chartrand Disc Appl Math Resolvability in Graph and The Metric Dimension Graphtri agustin puja pertiwiNo ratings yet
- Graph 1Document5 pagesGraph 1zainsaeed4871No ratings yet
- A Note On Non Split Locating Equitable DominationDocument4 pagesA Note On Non Split Locating Equitable DominationiiradminNo ratings yet
- Endsem SolDocument3 pagesEndsem SolLilia XaNo ratings yet
- Lecture Notes 1 - 4Document20 pagesLecture Notes 1 - 4Malik ShaanNo ratings yet
- Graph Theory - Solutions To Problem Set 1Document2 pagesGraph Theory - Solutions To Problem Set 1Eli Huseyinov100% (1)
- CSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissDocument34 pagesCSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissSreekesh RavindranNo ratings yet
- Some Websites To LearnDocument7 pagesSome Websites To LearnNanh NabiNo ratings yet
- NSN Form 2013 PDFDocument136 pagesNSN Form 2013 PDFAnca IacobNo ratings yet
- GSM500BT Bluetooth Barcode Scanner User Manual GENERALSCAN ELECTRONICS LIMITEDDocument14 pagesGSM500BT Bluetooth Barcode Scanner User Manual GENERALSCAN ELECTRONICS LIMITEDipinpersib ipinNo ratings yet
- 3 HACCP Overview Training DemoDocument17 pages3 HACCP Overview Training Demoammy_75No ratings yet
- I&m RF Interference HuntingDocument75 pagesI&m RF Interference HuntingPer KoNo ratings yet
- Pasay City Hall Renewal Form PDFDocument2 pagesPasay City Hall Renewal Form PDFNTSy Estinar0% (1)
- LL Module Barrowmaze 1 (Lv1-8, GG, 2012)Document87 pagesLL Module Barrowmaze 1 (Lv1-8, GG, 2012)Tony Helano100% (3)
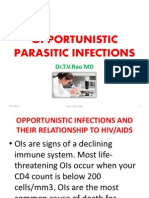
- Opportunistic Parasitic InfectionsDocument57 pagesOpportunistic Parasitic Infectionstummalapalli venkateswara raoNo ratings yet
- Electric Bike BatteryDocument3 pagesElectric Bike BatteryOrganic MechanicNo ratings yet
- School DRRM Roles and ResponsibilitiesDocument4 pagesSchool DRRM Roles and ResponsibilitiesClerica RealingoNo ratings yet
- A Practical Guide To Integrated Type II Diabetes CareDocument51 pagesA Practical Guide To Integrated Type II Diabetes CareusshashankNo ratings yet
- 6th Sem 24 Survey EnggsuDocument17 pages6th Sem 24 Survey EnggsukrmcharigdcNo ratings yet
- Learning-Activity-sheets - Gbio1 q2 HomeworkDocument23 pagesLearning-Activity-sheets - Gbio1 q2 HomeworkChad Laurence Vinson CandelonNo ratings yet
- Pharmacology of Vitamins: DR - Datten Bangun MSC - SPFK Dept - Farmakologi & Therapeutik Fak - Kedokteran Uhn MedanDocument41 pagesPharmacology of Vitamins: DR - Datten Bangun MSC - SPFK Dept - Farmakologi & Therapeutik Fak - Kedokteran Uhn Medanraranaomi29No ratings yet
- Corrosion in Sodium Hydroxide - Assignment-1Document5 pagesCorrosion in Sodium Hydroxide - Assignment-1NITIN KUMARNo ratings yet
- Estimating For Heavy Construction and Unit Price BidsDocument77 pagesEstimating For Heavy Construction and Unit Price BidsYousaf MulattuNo ratings yet
- Adani Ports & SEZ LimitedDocument9 pagesAdani Ports & SEZ LimitedHaider ChakiNo ratings yet
- Dork Diaries 10: Tales From A Not-So-Perfect Pet SitterDocument20 pagesDork Diaries 10: Tales From A Not-So-Perfect Pet SitterWENLY NG MoeNo ratings yet
- Co2 KiddeDocument50 pagesCo2 KiddeNattapong Natt100% (2)
- Bab 2 - Perilaku BiayaDocument40 pagesBab 2 - Perilaku BiayaAndy ReynaldyyNo ratings yet
- Gmyzm & 18 GSSQ - A 2021: Date of Publication: 13-9-2021Document44 pagesGmyzm & 18 GSSQ - A 2021: Date of Publication: 13-9-2021Shridhar RaskarNo ratings yet
- DEC Aluminium FormworkDocument14 pagesDEC Aluminium Formwork3mformcareNo ratings yet
- Arch DamDocument15 pagesArch DamHenok MandefroNo ratings yet
- Using Transistor As A Switch - ErmicroblogDocument24 pagesUsing Transistor As A Switch - ErmicroblogRKMNo ratings yet
- Alkhairat Company Profile (Final) Kii LamaadDocument28 pagesAlkhairat Company Profile (Final) Kii LamaadAbdulkadir HusseinNo ratings yet
- Embedded System (9168)Document5 pagesEmbedded System (9168)Victoria FrancoNo ratings yet
- Bastion: John Harris (B.Arch, RIBA)Document3 pagesBastion: John Harris (B.Arch, RIBA)raluca''No ratings yet
- Swconfig System BasicsDocument484 pagesSwconfig System BasicsLeonardo HutapeaNo ratings yet
- Chapter 2 (A) - DrRADocument27 pagesChapter 2 (A) - DrRAFareez SedakaNo ratings yet
- Unit 2 SummerDocument3 pagesUnit 2 SummerUmaNo ratings yet
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- Microsoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodFrom EverandMicrosoft PowerPoint Guide for Success: Learn in a Guided Way to Create, Edit & Format Your Presentations Documents to Visual Explain Your Projects & Surprise Your Bosses And Colleagues | Big Four Consulting Firms MethodRating: 5 out of 5 stars5/5 (5)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.From EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Rating: 5 out of 5 stars5/5 (3)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Microsoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]From EverandMicrosoft Excel Guide for Success: Transform Your Work with Microsoft Excel, Unleash Formulas, Functions, and Charts to Optimize Tasks and Surpass Expectations [II EDITION]Rating: 5 out of 5 stars5/5 (3)
- PYTHON PROGRAMMING: A Beginner’s Guide To Learn Python From ZeroFrom EverandPYTHON PROGRAMMING: A Beginner’s Guide To Learn Python From ZeroRating: 5 out of 5 stars5/5 (1)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionFrom EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionRating: 5 out of 5 stars5/5 (2)
- Microsoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsFrom EverandMicrosoft OneNote Guide to Success: Learn In A Guided Way How To Take Digital Notes To Optimize Your Understanding, Tasks, And Projects, Surprising Your Colleagues And ClientsRating: 5 out of 5 stars5/5 (3)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Competing in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldFrom EverandCompeting in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldRating: 4.5 out of 5 stars4.5/5 (21)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- Visual Studio Code: End-to-End Editing and Debugging Tools for Web DevelopersFrom EverandVisual Studio Code: End-to-End Editing and Debugging Tools for Web DevelopersNo ratings yet
- A Slackers Guide to Coding with Python: Ultimate Beginners Guide to Learning Python QuickFrom EverandA Slackers Guide to Coding with Python: Ultimate Beginners Guide to Learning Python QuickNo ratings yet
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersFrom EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersRating: 5 out of 5 stars5/5 (8)
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepFrom EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepRating: 4.5 out of 5 stars4.5/5 (9)
- Skill Up: A Software Developer's Guide to Life and CareerFrom EverandSkill Up: A Software Developer's Guide to Life and CareerRating: 4.5 out of 5 stars4.5/5 (40)
- Learn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisFrom EverandLearn Algorithmic Trading: Build and deploy algorithmic trading systems and strategies using Python and advanced data analysisNo ratings yet
- Unlock PHP 8: From Basic to Advanced: The next-level PHP 8 guide for dynamic web development (English Edition)From EverandUnlock PHP 8: From Basic to Advanced: The next-level PHP 8 guide for dynamic web development (English Edition)No ratings yet
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- Microservices Patterns: With examples in JavaFrom EverandMicroservices Patterns: With examples in JavaRating: 5 out of 5 stars5/5 (2)