You might also like
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesFrom EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Massively Multi Player Game DevelopmentDocument12 pagesMassively Multi Player Game Developmentbog20us100% (1)
- Algorithm and FlowchartDocument37 pagesAlgorithm and FlowchartdnlkabaNo ratings yet
- Designing Efficient Workbooks 2021Document81 pagesDesigning Efficient Workbooks 2021Gheorghe GhidiuNo ratings yet
- Optimizing Line Designs in PLS-CADDDocument17 pagesOptimizing Line Designs in PLS-CADDabdul khader100% (1)
- TargetLink Product-InformationDocument48 pagesTargetLink Product-Informationmazher_ecNo ratings yet
- Compiler Design-Code OptimizationDocument150 pagesCompiler Design-Code OptimizationmanicheeseNo ratings yet
- Started On State Completed On Time Taken Grade 48.00 96 FeedbackDocument273 pagesStarted On State Completed On Time Taken Grade 48.00 96 FeedbackHarshini RameshNo ratings yet
- Plan Your S/4 HANA Finance MigrationDocument4 pagesPlan Your S/4 HANA Finance MigrationMOORTHY.KENo ratings yet
- Algorithm and Pseudo CodesDocument44 pagesAlgorithm and Pseudo CodesLady GatlabayanNo ratings yet
- Unit-Vi: Principle Sources of OptimizationDocument11 pagesUnit-Vi: Principle Sources of OptimizationBalaji DandeNo ratings yet
- Notes On Peephole OptimizationDocument2 pagesNotes On Peephole OptimizationVivek and ClashNo ratings yet
- Code OptmizeDocument41 pagesCode OptmizeAkshay SNo ratings yet
- Unit V - Code Optimization and Code Generation: Course MaterialDocument41 pagesUnit V - Code Optimization and Code Generation: Course MaterialTanmay RaoNo ratings yet
- Unit - Viii Machine Dependent Code Optimization Peephole OptimizationDocument9 pagesUnit - Viii Machine Dependent Code Optimization Peephole OptimizationMamatha LaxmiNo ratings yet
- Unit V - Code Optimization and Code Generation: Sri Vidya College of Engineering and Technology Course MaterialDocument41 pagesUnit V - Code Optimization and Code Generation: Sri Vidya College of Engineering and Technology Course Materialsarala pulivarthiNo ratings yet
- Improve Code Performance with Peephole OptimizationDocument20 pagesImprove Code Performance with Peephole OptimizationSwapnil ShindeNo ratings yet
- Unit 5 - Compiler Design - WWW - Rgpvnotes.in PDFDocument15 pagesUnit 5 - Compiler Design - WWW - Rgpvnotes.in PDFApNo ratings yet
- CS602PC - Compiler - Design - Lecture Notes - Unit - 5Document28 pagesCS602PC - Compiler - Design - Lecture Notes - Unit - 5Senthil Kumar SkumarNo ratings yet
- MCA 0705 II UNIT 5 Code Optimization & Code GenerationDocument10 pagesMCA 0705 II UNIT 5 Code Optimization & Code GenerationDr. V. Padmavathi Associate ProfessorNo ratings yet
- Unit 5 - Compiler Design - WWW - Rgpvnotes.inDocument14 pagesUnit 5 - Compiler Design - WWW - Rgpvnotes.inAjay SenNo ratings yet
- CH 5Document8 pagesCH 5mame MagnawNo ratings yet
- Peephole OptimizationDocument3 pagesPeephole OptimizationManjusha TakkellapatiNo ratings yet
- Code Optimization Unit-4-IIDocument27 pagesCode Optimization Unit-4-IIHimanshuNo ratings yet
- OptimizationDocument21 pagesOptimizationleks91No ratings yet
- In This SectionDocument6 pagesIn This Sectiondream of lifesNo ratings yet
- COMPILER DESIGN Unit 5 Two Mark With AnswerDocument7 pagesCOMPILER DESIGN Unit 5 Two Mark With AnswerPRIYA RAJINo ratings yet
- Unit 5 Compiler PDFDocument28 pagesUnit 5 Compiler PDFserneNo ratings yet
- Code Optimization PDFDocument25 pagesCode Optimization PDFSarvesh HalbeNo ratings yet
- CD Unit-VDocument10 pagesCD Unit-VVasudevarao PeyyetiNo ratings yet
- @@code OptimDocument20 pages@@code Optimobwani777No ratings yet
- Code Generation: Design IssuesDocument7 pagesCode Generation: Design IssuesRuhi AgarwalNo ratings yet
- Compiler Design - Code Optimization TechniquesDocument6 pagesCompiler Design - Code Optimization TechniquesSUKRIT SAHUNo ratings yet
- Chapter 6 - Code GenerationDocument22 pagesChapter 6 - Code GenerationArebu MarufNo ratings yet
- Artifact FLO1 2 ELab Learning ToolsDocument31 pagesArtifact FLO1 2 ELab Learning ToolsMurali KrishnaNo ratings yet
- Ch9 PeepHoleDocument12 pagesCh9 PeepHolemadhurimapatra1987No ratings yet
- Compiler Code Optimizations TechniquesDocument24 pagesCompiler Code Optimizations TechniquesKANSIIME KATENo ratings yet
- Looping Instructions: 1.1 Unconditional LoopsDocument5 pagesLooping Instructions: 1.1 Unconditional LoopsakhiyarwaladiNo ratings yet
- Runtime Storage Organization and Code Optimization TechniquesDocument15 pagesRuntime Storage Organization and Code Optimization Techniquesashok koppoluNo ratings yet
- DecompilationDocument6 pagesDecompilationRavi MohanNo ratings yet
- Compiler Design Code OptimizationDocument5 pagesCompiler Design Code OptimizationSaiTejaNo ratings yet
- Com 413 Ammar Usman Sabo H21CS018Document16 pagesCom 413 Ammar Usman Sabo H21CS018ammarusmansabo117No ratings yet
- Quick Primer On LLVM IR: (For Those Already Familiar With LLVM IR, Feel Free To)Document13 pagesQuick Primer On LLVM IR: (For Those Already Familiar With LLVM IR, Feel Free To)Chinmay AgnihotriNo ratings yet
- Faculty Notes PPSDocument91 pagesFaculty Notes PPSShaik AnsarNo ratings yet
- PIC Basic Vs Assembly and Code TutorialDocument30 pagesPIC Basic Vs Assembly and Code TutorialsaneildNo ratings yet
- A Model For Self-Modifying CodeDocument17 pagesA Model For Self-Modifying CodeiamdemienNo ratings yet
- Cobol Interview Question PDFDocument23 pagesCobol Interview Question PDFArpit SoniNo ratings yet
- Code OptimizationDocument149 pagesCode OptimizationbotcreaterNo ratings yet
- 5.2.2 Debugging TechniquesDocument5 pages5.2.2 Debugging Techniquestedzone9No ratings yet
- Unit 5 BardDocument8 pagesUnit 5 BardlojsdwiGWNo ratings yet
- CH5 1Document23 pagesCH5 1sam negroNo ratings yet
- C Undefined Behavior GuideDocument4 pagesC Undefined Behavior GuideJohn SmithNo ratings yet
- Mpasm DirectiveDocument22 pagesMpasm DirectiveDublu_VNo ratings yet
- C++ Final ExamDocument19 pagesC++ Final ExamFawad AhmadNo ratings yet
- Vision 2024 CD Chapter 5 Compiler Code Optimization 731689660928542Document24 pagesVision 2024 CD Chapter 5 Compiler Code Optimization 731689660928542Aman KoliNo ratings yet
- Darshan Sem7 170701 CD 2014Document81 pagesDarshan Sem7 170701 CD 2014harishpillai1994No ratings yet
- Lab 04Document10 pagesLab 04Kashif Mujeeb Abdul MujeebNo ratings yet
- What Every Compiler Writer Should Know About Programmers or "Optimization" Based On Undefined Behaviour Hurts PerformanceDocument22 pagesWhat Every Compiler Writer Should Know About Programmers or "Optimization" Based On Undefined Behaviour Hurts PerformanceZilNo ratings yet
- Code Generation and Instruction Selection Unit-8Document6 pagesCode Generation and Instruction Selection Unit-8Sridhar Vangapally VNo ratings yet
- MI Chapter 3Document26 pagesMI Chapter 3DANIEL ABERANo ratings yet
- Getting the Most Out of Your C CompilerDocument16 pagesGetting the Most Out of Your C CompilerGrijesh MishraNo ratings yet
- C++ Reverse DisassemblyDocument33 pagesC++ Reverse Disassemblytelephonica100% (2)
- CS61B P. N. Hilfinger Spring 1998: Basic Functions of A DebuggerDocument5 pagesCS61B P. N. Hilfinger Spring 1998: Basic Functions of A DebuggerAshmitaNo ratings yet
- Program Control Instructions ExplainedDocument43 pagesProgram Control Instructions ExplainedDegage KaloroNo ratings yet
- Type Systems For Optimizing Stack-Based CodeDocument25 pagesType Systems For Optimizing Stack-Based CodeYonas BiniamNo ratings yet
- Undecidable Problems For Recursively Enumerable Languages: ContinuedDocument54 pagesUndecidable Problems For Recursively Enumerable Languages: Continuedapi-20012397No ratings yet
- We Use A Multitape Turing MachineDocument33 pagesWe Use A Multitape Turing Machineapi-20012397No ratings yet
- Class 20Document44 pagesClass 20api-20012397No ratings yet
- Polynomial Computable Function:: For Any Computes in Polynomial TimeDocument11 pagesPolynomial Computable Function:: For Any Computes in Polynomial Timeapi-20012397No ratings yet
- Recursively Enumerable and Recursive LanguagesDocument61 pagesRecursively Enumerable and Recursive Languagesapi-20012397No ratings yet
- Pdas Accept Context-Free LanguagesDocument97 pagesPdas Accept Context-Free Languagesapi-20012397No ratings yet
- Class 16Document65 pagesClass 16api-20012397No ratings yet
- A Universal Turing MachineDocument56 pagesA Universal Turing Machineapi-20012397No ratings yet
- Pdas Accept Context-Free LanguagesDocument97 pagesPdas Accept Context-Free Languagesapi-20012397No ratings yet
- Linear Bounded Automata LbasDocument36 pagesLinear Bounded Automata Lbasapi-20012397No ratings yet
- The Pumping Lemma For Context-Free LanguagesDocument74 pagesThe Pumping Lemma For Context-Free Languagesapi-20012397No ratings yet
- More Applications of The Pumping LemmaDocument55 pagesMore Applications of The Pumping Lemmaapi-20012397No ratings yet
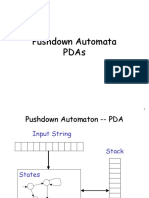
- Pushdown Automata PdasDocument90 pagesPushdown Automata Pdasapi-20012397No ratings yet
- Class 6Document39 pagesClass 6api-20012397No ratings yet
- Class 8Document66 pagesClass 8api-20012397No ratings yet
- More Applications of The Pumping LemmaDocument31 pagesMore Applications of The Pumping Lemmaapi-20012397No ratings yet
- IT2004Document24 pagesIT2004Ankit MittalNo ratings yet
- Simplifications of Context-Free GrammarsDocument62 pagesSimplifications of Context-Free Grammarsapi-20012397No ratings yet
- Class 2Document56 pagesClass 2api-20012397No ratings yet
- Nfas Accept The Regular LanguagesDocument66 pagesNfas Accept The Regular Languagesapi-20012397No ratings yet
- Class 5Document38 pagesClass 5api-20012397No ratings yet
- Run Time Storage Managment: AdvertisementDocument10 pagesRun Time Storage Managment: Advertisementapi-20012397No ratings yet
- Cs Gate Paper 2003Document25 pagesCs Gate Paper 2003sivakishanvNo ratings yet
- Non-Deterministic Finite AutomataDocument78 pagesNon-Deterministic Finite Automataapi-20012397No ratings yet
- Class 1Document41 pagesClass 1api-20012397No ratings yet
- CSCI-2400 Models of ComputationDocument36 pagesCSCI-2400 Models of Computationapi-20012397No ratings yet
- CSCI-2400 Models of ComputationDocument36 pagesCSCI-2400 Models of Computationapi-20012397No ratings yet
- CS2006Document29 pagesCS2006api-3782519No ratings yet
- Probability and StatisticsDocument35 pagesProbability and Statisticsapi-20012397100% (1)
- System of EquationsDocument32 pagesSystem of Equationsapi-20012397No ratings yet
- Prosim PDFDocument103 pagesProsim PDFMatteo AmbrosettiNo ratings yet
- STA TERMINOLOGY BASICSDocument13 pagesSTA TERMINOLOGY BASICSvaibhav sonewaneNo ratings yet
- II - Software Design For Low PowerDocument11 pagesII - Software Design For Low Powermonishabe23No ratings yet
- Advanced Database Systems Chapter 2Document16 pagesAdvanced Database Systems Chapter 2Jundu OmerNo ratings yet
- UCAV Configuration & Performance Trade-OffsDocument14 pagesUCAV Configuration & Performance Trade-OffsendoparasiteNo ratings yet
- Compiler ConstructionDocument53 pagesCompiler ConstructionQasim AbidNo ratings yet
- LocusDocument26 pagesLocusprizzydNo ratings yet
- Vmgen: For Gforth Version 0.7.0, November 2, 2008Document42 pagesVmgen: For Gforth Version 0.7.0, November 2, 2008Letm EsignupNo ratings yet
- Config Guide Trim Op Tim Ization ApoDocument13 pagesConfig Guide Trim Op Tim Ization Apobertjagers2000No ratings yet
- Large x86 - 64 Assembly ProgramsDocument10 pagesLarge x86 - 64 Assembly Programspulp noirNo ratings yet
- ICCII N-2017.09 Opto Placement TrainingDocument42 pagesICCII N-2017.09 Opto Placement TrainingQuoc Anh LeNo ratings yet
- Xc8 v2.41 Full Install Release Notes PICDocument105 pagesXc8 v2.41 Full Install Release Notes PICJose PereiraNo ratings yet
- Overflow in CDocument27 pagesOverflow in CjlmansillaNo ratings yet
- 16 MarksDocument5 pages16 MarksindhuNo ratings yet
- Automatic Handover Optimization Trial ResultsDocument14 pagesAutomatic Handover Optimization Trial Resultsأبوعمر الفاروق عبدالرحمنNo ratings yet
- Tue - Leopold - 2013-11 Kanban Flight Levels LKCE2013 Klaus LeopoldDocument20 pagesTue - Leopold - 2013-11 Kanban Flight Levels LKCE2013 Klaus Leopoldgalter6No ratings yet
- Amdahl's Law Example #2: - Protein String Matching CodeDocument23 pagesAmdahl's Law Example #2: - Protein String Matching CodeAsif AmeerNo ratings yet
- Mckinsey ReportDocument124 pagesMckinsey ReportJack ReesNo ratings yet
- CCS - View Topic - CRC16, Very Efficient PDFDocument9 pagesCCS - View Topic - CRC16, Very Efficient PDFEsmael PradoNo ratings yet
- Lab6 HW/SW System Debug Lab: MicroblazeDocument11 pagesLab6 HW/SW System Debug Lab: Microblazeamreshjha22No ratings yet
- Compiler Optimizations for PowerPC ArchitectureDocument30 pagesCompiler Optimizations for PowerPC ArchitectureaNo ratings yet
- New quality control system for paper industryDocument4 pagesNew quality control system for paper industryAdjie De'RufinNo ratings yet
- Real-Time Image Processing On Low Cost Embedded PDFDocument32 pagesReal-Time Image Processing On Low Cost Embedded PDFdanielNo ratings yet
- 09 Green SW Engineering - Ideas For Including Energy Efficiency Into Your Software Projects - ICSE09Document23 pages09 Green SW Engineering - Ideas For Including Energy Efficiency Into Your Software Projects - ICSE09om mustafa yousifNo ratings yet