You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Cd300m Parts BreakdownDocument10 pagesCd300m Parts BreakdownAmanda FitzgeraldNo ratings yet
- LT Loads&SwitchgearDocument48 pagesLT Loads&SwitchgearsreekanthbammidiNo ratings yet
- 3-Oracle Application Framework (OAF) Training Guide - EO, VO, Page, Query Region, LOV, PPRDocument73 pages3-Oracle Application Framework (OAF) Training Guide - EO, VO, Page, Query Region, LOV, PPRPreethi KishoreNo ratings yet
- 21 CFR 177Document6 pages21 CFR 177i_flyNo ratings yet
- Fire ProtectionDocument44 pagesFire ProtectionAbdul JabbarNo ratings yet
- Stator Earth Fault in 200MW Generator-A Case StudyDocument5 pagesStator Earth Fault in 200MW Generator-A Case StudylrpatraNo ratings yet
- CRISC BrochureDocument2 pagesCRISC BrochureSpipparisNo ratings yet
- Acoustic Conditioning and Ranching of Black Sea BassDocument8 pagesAcoustic Conditioning and Ranching of Black Sea BassArief NurNo ratings yet
- Acoustic Conditioning and Ranching of Black Sea BassDocument8 pagesAcoustic Conditioning and Ranching of Black Sea BassArief NurNo ratings yet
- Bekal Menuju Akherat (Zaadul Ma'ad) - Ibnul Qoyyim Al-JauziyahDocument432 pagesBekal Menuju Akherat (Zaadul Ma'ad) - Ibnul Qoyyim Al-Jauziyahdikidarmawan0% (1)
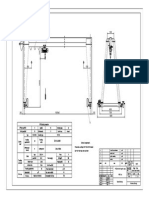
- Technical Drawing Gantry Crane 5 TonDocument1 pageTechnical Drawing Gantry Crane 5 TonArief NurNo ratings yet
- Performance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilDocument14 pagesPerformance-Based Seismic Design of Rocking Shallow Foundations in Cohesive SoilSong FendaNo ratings yet
- Qinhuangdao Red Ribbon ParkDocument18 pagesQinhuangdao Red Ribbon Parkjaya saputraNo ratings yet
- Solartech Solar Pumping Inverter: Technical DataDocument1 pageSolartech Solar Pumping Inverter: Technical Dataadolfo escobarNo ratings yet
- Changes and Implications On Contractors & Sub-ContractorsDocument2 pagesChanges and Implications On Contractors & Sub-ContractorsFrd Ohsem Hafr0% (1)
- Isolation Selector GuideDocument12 pagesIsolation Selector GuidesandeepbhallaNo ratings yet
- 2014 Product Keys For Autodesk ProductsDocument4 pages2014 Product Keys For Autodesk ProductsNacer AssamNo ratings yet
- Atv71 Controller Inside en v3Document25 pagesAtv71 Controller Inside en v3Juan Rodriguez ArevaloNo ratings yet
- Camera Tubes NDocument30 pagesCamera Tubes NRamakrishna VadlamudiNo ratings yet
- Computer Graphics - Lesson PlanDocument15 pagesComputer Graphics - Lesson PlansoniadrallNo ratings yet
- Maxwell v16 2DDocument10 pagesMaxwell v16 2Ddesi_parisNo ratings yet
- Saskatchewan Drivers HandbookDocument175 pagesSaskatchewan Drivers HandbookdrivershandbooksNo ratings yet
- Is 2571-1970Document27 pagesIs 2571-1970Deboline MitraNo ratings yet
- Ce 506 Prestressed Concrete Design: M R M M MDocument2 pagesCe 506 Prestressed Concrete Design: M R M M Mbadr amNo ratings yet
- Lab Report For Epoxy Resin Polymer Concrete by GroupbbbbbbbDocument23 pagesLab Report For Epoxy Resin Polymer Concrete by GroupbbbbbbbBetelhem KifleNo ratings yet
- Bosch Video Management System - Configuration ManualDocument260 pagesBosch Video Management System - Configuration Manualvsuneelg100% (1)
- Bioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesDocument33 pagesBioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesyassinharanNo ratings yet
- Statement of AccountDocument45 pagesStatement of AccountSARAVANAN KESAVANNo ratings yet
- Kleene ClosureDocument6 pagesKleene ClosurepbhmmmmNo ratings yet
- S3F94xx BatteryCharger An REV000 060109-0Document40 pagesS3F94xx BatteryCharger An REV000 060109-0Jack ChanNo ratings yet
- Atulya Beharwal: Class - 7 ADocument15 pagesAtulya Beharwal: Class - 7 AAtul Beharwal100% (1)
- Zahvalnica Bla BlaDocument2 pagesZahvalnica Bla BlaBiljanaJanjušević100% (1)
- How To Make AspirinDocument5 pagesHow To Make Aspirincb67No ratings yet