You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
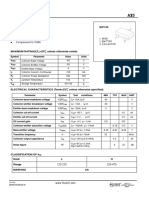
- PNP Transistor SOT-23 DatasheetDocument2 pagesPNP Transistor SOT-23 DatasheetBahram4321No ratings yet
- For ECE Engg Graduates, How Do I Prepare For The ISRO SC Exam - What All Subjects and Materials Do I Have To Prepare - How Do I Crack The Interview - Quora PDFDocument8 pagesFor ECE Engg Graduates, How Do I Prepare For The ISRO SC Exam - What All Subjects and Materials Do I Have To Prepare - How Do I Crack The Interview - Quora PDFvigneshwaran50No ratings yet
- Department of Mechatronics: Subject:-Electrical Engineering Second Year Mechatronics Unit 5 - Measuring InstrumentsDocument40 pagesDepartment of Mechatronics: Subject:-Electrical Engineering Second Year Mechatronics Unit 5 - Measuring InstrumentsVedantNo ratings yet
- Catalogo Plataformas EngDocument29 pagesCatalogo Plataformas EngDimuthu Nuwan AbeysingheNo ratings yet
- Installation Instructions: Compact Genset Controller, CGC 400Document25 pagesInstallation Instructions: Compact Genset Controller, CGC 400Joy GreenNo ratings yet
- Guide For Application of IEC 62271-100 AND IEC 62271-1: Making and Breaking TestsDocument186 pagesGuide For Application of IEC 62271-100 AND IEC 62271-1: Making and Breaking TestsJosé Alejandro RangelNo ratings yet
- Scorpion Rapide Data Sheet Nov 2014Document2 pagesScorpion Rapide Data Sheet Nov 2014Hernandez Rodriges Alexis BryamNo ratings yet
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Document17 pagesBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Try Test 1Document6 pagesTry Test 1Theophilus AmponsahNo ratings yet
- Cable N2xyDocument1 pageCable N2xyAlicia AltamiranoNo ratings yet
- Automatic Power Supply Control From Four Different SourcesDocument21 pagesAutomatic Power Supply Control From Four Different SourcesJishnu Ps100% (1)
- DPS Leviton 57000 SeriesDocument4 pagesDPS Leviton 57000 SeriesAndres LopezNo ratings yet
- Targa Instruction ManualDocument18 pagesTarga Instruction ManualPedro Elias SantanaNo ratings yet
- CBSE Class-12 Physics Quick Revision Notes on Electrostatic Potential and CapacitanceDocument2 pagesCBSE Class-12 Physics Quick Revision Notes on Electrostatic Potential and CapacitanceAshish PalaiNo ratings yet
- Transistor Circuits Manual No 2 Bernard 163 Clive SinclairDocument25 pagesTransistor Circuits Manual No 2 Bernard 163 Clive Sinclairsantiago962100% (1)
- Chapter Ten: Household ElectricityDocument22 pagesChapter Ten: Household Electricityashikin_abu_bakarNo ratings yet
- Find energy and charge of capacitors with dielectricsDocument3 pagesFind energy and charge of capacitors with dielectricsNurul Husna MNNo ratings yet
- HDC-HS300P HDC-HS300PC Hdc-Hs300eb Hdc-Hs300ec Hdc-Hs300ee Hdc-Hs300ef Hdc-Hs300eg Hdc-Hs300ep HDC-HS300GC HDC-HS300GK HDC-HS300GT HDC-HS300SGDocument105 pagesHDC-HS300P HDC-HS300PC Hdc-Hs300eb Hdc-Hs300ec Hdc-Hs300ee Hdc-Hs300ef Hdc-Hs300eg Hdc-Hs300ep HDC-HS300GC HDC-HS300GK HDC-HS300GT HDC-HS300SGspiderfanNo ratings yet
- LAB-VOLT 3-Phase Induction (Squirrel-Cage) MachinesDocument11 pagesLAB-VOLT 3-Phase Induction (Squirrel-Cage) Machinesanyr2No ratings yet
- User Manual TV Power Demoboard TEA8818DB1440: TEA8818 + TEA1995 130W 13V and 90V Power SupplyDocument29 pagesUser Manual TV Power Demoboard TEA8818DB1440: TEA8818 + TEA1995 130W 13V and 90V Power SupplyCube7 Geronimo50% (2)
- Analog Digital ThermopileDocument21 pagesAnalog Digital ThermopileAbdessamad BnaneNo ratings yet
- Datasheet NCP1200P60GDocument16 pagesDatasheet NCP1200P60GJose BenavidesNo ratings yet
- BS 7671 On Site Guide Green 17th Edition by IET PDFDocument205 pagesBS 7671 On Site Guide Green 17th Edition by IET PDFPopescuLaurentiu100% (2)
- Electrochemistry: All 16 Students Attained ObjectiveDocument5 pagesElectrochemistry: All 16 Students Attained ObjectivemansmansNo ratings yet
- 50hz Noise Removal From ECG Power SupplyDocument6 pages50hz Noise Removal From ECG Power SupplyVidhya AigalNo ratings yet
- Over Current Relay Performance with HarmonicsDocument43 pagesOver Current Relay Performance with HarmonicsRakesh ShinganeNo ratings yet
- LM723 Voltage RegulatorDocument14 pagesLM723 Voltage Regulatorvanminh91bkNo ratings yet
- Ep1c Manual-EnDocument120 pagesEp1c Manual-Encarlos alfonso calderonNo ratings yet
- AQR Daughter Board (HTG - AQRDBa)Document9 pagesAQR Daughter Board (HTG - AQRDBa)William PeeleNo ratings yet
- Telecommunications Engineering: Engineering Studies - HSC Course, Stage 6Document158 pagesTelecommunications Engineering: Engineering Studies - HSC Course, Stage 6Johnny MarshNo ratings yet