Professional Documents
Culture Documents
Ditlevsen - MathematicalModels For Structural Reliability Analysis
Uploaded by
Enson PortelaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Ditlevsen - MathematicalModels For Structural Reliability Analysis
Uploaded by
Enson PortelaCopyright:
Available Formats
Dimension Reduction and
Discretization in Stochastic Problems by
Regression Method
Reprint from Mathematical Models for Structural Reliability Analysis (eds.: F. Casciati, J.B. Roberts), CRC,
Florida, 1996, pp 51 - 138.
Ove Ditlevsen
Technical University of Denmark
1
2 Structural Reliability
Contents
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Linear Regression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Normal distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Non-Gaussian distributions and linear regression . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Marginally transformed Gaussian processes and elds . . . . . . . . . . . . . . . . . . . . . . 17
1.6 Discretized elds dened by linear regression on a nite set of eld values . . . . . . . . . . 20
1.7 Discretization dened by linear regression on nite set of linear functionals . . . . . . . . . 20
1.8 Poisson Load Field Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.9 Stochastic nite element methods and reliability calculations . . . . . . . . . . . . . . . . . . 29
1.10 Classical versus statistical-stochastic interpolation formulated on the basis of the principle
of maximum likelihood . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.11 Computational practicability of the statistical-stochastic interpolation method . . . . . . . 38
1.12 Field modelling on the basis of measured noisy data . . . . . . . . . . . . . . . . . . . . . . . 40
1.13 Discretization dened by linear regression on derivatives at a single point . . . . . . . . . . 46
1.14 Conditioning on crossing events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.15 Slepian model vector processes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.16 Applications of Slepian model processes in stochastic mechanics . . . . . . . . . . . . . . . 56
1.1 Introduction
It is not the intention in the following to use a rigorous mathematical style of presentation, but rather
to stick to a heuristic style that makes the text possible to read for mathematically motivated engineers
and scientists with an appreciation for applications of probabilistic concepts in their elds of work. A
basic knowledge of elementary probability theory will be assumed including the denition of a vector
of random variables and their joint distribution, expectations, variances, covariances, etc., the rules of
operating with these concepts, and the generalisations to random processes and random elds. Neither
there will be systematic references to the many brilliant mathematicians and statisticians that created
these concepts and theories now belonging to the standard toolbox of probability and mathematical
statistics. Predominantly the references will be to originators of applications that are related to structural
reliability problems and stochastic mechanics problems.
Many different stochastic problems inengineering andinthe sciences are denedinterms of random
processes or randomelds. In most of the problems these are non-countable innite families of random
variables: To each t in an ordered index set I (usually a subset of or the entire time axis or a subset
of coordinates that dene points in some space) a random variable (or random vector, or even a more
3
4 Structural Reliability
general random entity) X(t ) is adjoined, and, in principle, (according to a theorem of Kolmogorov [1, 2])
this family of random variables is completely dened by the set of joint probability distributions that
correspond to all nite subsets of I , given that the set of probability distributions satises some obvious
consistency conditions. In the following the word eld is used as a common short terminology for
random process and random eld, except if otherwise is noted.
When it comes to the practical solution of the stochastic problems it is only in exceptional cases
possible to proceed without introducing simplications based on more or less approximate reasoning.
Several different types of simplications may be applicable on a given problemdependent on the type of
the problem.
A frequently used simplication is to assume that the elds are related in some way to the class of
Gaussian random variables, such that the fact that this class is closed with respect to linear operations
can be utilized for obtaining the solution. Moreover, it can be utilized that the class of jointly distributed
Gaussian random variables has the convenient property that the conditional expectation of any subset
A of the Gaussian random variables given any subset B of the Gaussian random variables is coincident
with the linear regression of the subset A on the subset B of randomvariables. The advantage is thus that
the conditional expectations can be calculated solely by algebraic operations on the expectations and the
covariances of the total set of Gaussian randomvariables. This is basic knowledge given in most elemen-
tary probability courses. Due to its importance for the present subject the concept of linear regression
will be introduced specically in the following section.
Another similar type of simplication exists in the case where random point elds enter the prob-
lems. Then it is often used in practice to assume that Poissonian properties are present thus opening a
catalogue of known results.
Inorder to be able to reachcomputational results it is generally necessary to introduce simplications
by which the innite dimensional set of random variables of the eld is replaced by another innite
set of random variables dened completely in terms of a nite set of representative random variables.
This replacement is denoted as discretization of the eld. Problemindependent automatic discretization
procedures are generally based on direct approximation of the eld (most often dened as input to the
stochastic problem). Automatic procedures have obvious advantages inroutine work. However, the nite
set of random variables can be chosen such that it is sufciently representative for the solution to the
problem, noting that often it is less important whether or not the original eld is well approximated
when judged by direct comparison of sample functions. These aspects will be discussed in connection
with the introduction of the mathematical tools of eld discretization.
The opposite problem is about extending from a nite subset of the innite set of random variables
of a eld about which nothing else is known except, perhaps, that it belongs to some given class of elds.
The extension is intended to be to a eld that is supposed to resemble the unknown eld. This is the
interpolation problem. It is obviously not solvable in general in the sense that it becomes possible to
judge the goodness of the approximation by some well dened measure of error. A principle of simplic-
ity may instead be taken as a way to choose between the possibly innite number of elds that can be
constructed as extensions.
The problem becomes still more ambiguous if only a single sample of values of the nite set of ran-
dom variables is known. These values may even be given without any reference to a random variable
model. They may be given as some measured almost error free values of a deterministic but otherwise
unknownfunction. The interpolationproblemis nevertheless solvable by reference to the same principle
of simplicity as applied in the statistical theory of maximum likelihood estimation. This means that the
measured values may be treated as if they were values froma realization of a suitably chosen type of eld,
the distribution parameters of which become estimated from the sample. The obtained estimate of the
Dimension Reduction and Discretization 5
conditional meanvalue variation over the index set giventhat the measured values are reproduced by the
conditional mean at the points of measurement may then be taken as the interpolation function. This
method of interpolation is often called kriging after the South African mining engineer Krige [3][6], who
rst applied the principle of statistical-stochastic interpolation for estimating the size and properties of
mineral deposits. The philosophy of statistical-stochastic interpolation is discussed and interpreted in
terms of principles of deterministic interpolation in Section 2.10.
A further complication is added to the interpolation problemwhen the eld values are uncertain due
to superimposed measuring uncertainty. To deal with this problem it is necessary to make assumptions
about the eld properties of the measuring uncertainty. Two different measuring error models are con-
sidered in Section 2.12. The one is the standard model of independently added random errors and the
other is a model where the error eld has the same correlation structure as the unknown eld itself. It
is demonstrated for both models that the method of statistical-stochastic interpolation is well suited for
the separation of the measuring uncertainty eld from the object eld. The importance of the principle
of making independent double measurements of each eld value is emphasized by this error analysis.
Certain types of problems in random vector processes can be analysed by discretization dened by
linear regression on the derivatives at a single time point. In particular, this type of discretization is
relevant in connection with the evaluation of the occurrence rate of events that may happen when a sta-
tionary Gaussian vector process crosses out of a given domain. Such investigations belong to the theory
of so-called Slepian model processes. The linear regressions on derivatives are given in Section 2.13 and
the problem of how to make unique conditioning on a crossing event of zero probability is discussed in
Section 2.14. Being convinced that for the conditioning to be applicable on physical problems, the cross-
ing events must be dened as horizontal window crossings, the Slepian process models for the sample
function behavior at a level upcrossing follow directly. Several examples of interesting applications in
stochastic mechanics are given in the last section.
Except for Section 2.9 this text solely deals with dimension reductions and eld discretizations based
directly on the concept of linear regression. There are alternative methods based on truncations of series
expansions of the given randomeld with respect to some innite orthogonal basis of functions. Like the
linear regressions these truncations are linear functions (or functionals) on the eld, and they are there-
fore closely related to specic linear regressions. Most often the expansions are based on the so-called
Karhunen-Loeve theorem[7] by which a eld of mean zero can be represented as an innite series where
the ith term is the ith normalized eigenfunction to the eigenvalue problem with the covariance function
of the eld as kernel. The coefcients are then uncorrelated random variables, the ith of variance equal
to the ith eigenvalue. Since exact solutions are known only for a few simple cases of correlation func-
tions, the different methods apply various discretization approximations to reduce the integral equation
eigenvalue problem to a matrix eigenvalue problem [8][11]. Also the random coefcients are usually
taken to be Gaussian so that the expansion represents a Gaussian eld. Some accuracy comparisons be-
tween different discretization methods are reported in the literature [12]. There can hardly be formulated
a statement of superiority as to which discretization method that generally uses the smallest number of
random variables to satisfy any given accuracy requirement.
1.2 Linear Regression
Consider a pair (X, Y ) of random variables contained in some mathematical model of interest in a given
engineering context. We might wish to simplify the random variable part of the model by reducing the
dimension of the random vector (X, Y ) from 2 to 1. Let us assume that Y is the least important of the
6 Structural Reliability
two random variables for the considered problem. The simplest approximation next to replacing Y by a
constant is to replace Y by an inhomogeneous linear function a +bX of X.
The coefcients a and b should obviously be chosen such that some error measure becomes mini-
mized. It is reasonable to require that the error measure denition is chosen so that it is directly related
to the solution of the model. However, if a problem independent procedure is preferable from an oper-
ational point of view, the error measure must be related solely to X and Y . A reasonable procedure is to
determine a and b such that the mean square deviation E[(Y a bX)
2
] becomes as small as possible.
Minimum is obtained for the values of a and b that satisfy the equations
a
E[(Y a bX)
2
] 2E[Y a bX] 0 (1.1)
b
E[(Y a bX)
2
] 2E[(Y a bX)X] 0 (1.2)
from which it follows that
E[Y ] a +bE[X] (1.3)
E[Y X] aE[X] +bE[X
2
] (1.4)
Since the variance Var[X] and the covariance Cov[X, Y ] are
Var[X] E[X
2
] E[X]
2
(1.5)
Cov[X, Y ] E[XY ] E[X]E[Y ] (1.6)
respectively, (1.3) and (1.4) gives
a E[Y ]
Cov[X, Y ]
Var[X]
E[X] (1.7)
b
Cov[X, Y ]
Var[X]
(1.8)
This linear approximation of Y in terms of X is called the linear regression of Y on X, and it is written as
E[Y [X]. The coefcient b given by (1.8) is called the regression coefcient. The result is
E[Y [X] E[Y ] +
Cov[X, Y ]
Var[X]
(X E[X]) (1.9)
The error, Y
E[Y [X], is called the residual, and it has the variance
Var[Y
E[Y [X]] Var[Y ]
Cov[X, Y ]
2
Var[X]
Var[Y ](1[X, Y ]
2
)
(1.10)
where
[X, Y ]
Cov[X, Y ]
D[X]D[Y ]
(1.11)
Dimension Reduction and Discretization 7
is the correlation coefcient. It is important to note that
Cov[X, Y
E[Y [X]] 0 (1.12)
The conditions E[Y a bX] 0 and Cov[X, Y a bX] 0 can be chosen as an alternative basis for
dening the linear regression.
Clearly it depends on the size of [X, Y ] and of Var[Y ] how good the approximation is, if the residual
is neglected. For example,
Var[X +Y ] Var[X] +2Cov[X, Y ] +Var[Y ] (1.13)
and
Var[X +
E[Y [X]] (1+
Cov[X, Y ]
Var[X]
)
2
Var[X]
Var[X] +2Cov[X, Y ] +[X, Y ]
2
Var[Y ]
(1.14)
deviates by the residual variance.
The concept of linear regression of Y on X is directly generalized to the linear regression
E[Y[X] of an
m-dimensional randomvector Y {Y
i
} on an n-dimensional randomvector X{X
j
} as the best inhomo-
geneous linear approximation a+BX to Y in terms of X in the sense that a {a
i
} and B{b
i j
} minimizes
the mean square deviation
E[(YaBX)
t
(YaBX)]
m
i 1
E[(Y
i
a
i
j 1
b
i j
X
j
)
2
]
(1.15)
where prime
t
attached to a matrix indicates transposition of the matrix. By minimizing each termon the
right side we directly get
E[Y
i
] a
i
j 1
b
i j
E[X
j
] (1.16)
in the same way as (1.3) follows from (1.1). Thus a
i
can be eliminated from the i th term of (1.15) so that
it becomes
E[(Y
i
j 1
b
i j
X
j
)
2
] (1.17)
after renaming X
i
E[X
i
] and Y
i
E[Y
i
] to X
i
and Y
i
, respectively. These random variables now have
zero mean. Partial differentiation of (1.17) with respect to b
i k
(using that b
i j
/b
i k
j k
where
j k
is
Kroneckers delta) and setting to zero gives the equation
E[(Y
i
j 1
b
i j
X
j
)
n
j 1
j k
X
j
] E[Y
i
X
k
]
n
j 1
b
i j
E[X
j
X
k
] Cov[Y
i
, X
k
]
n
j 1
b
i j
Cov[X
j
, X
k
] 0
(1.18)
8 Structural Reliability
In matrix notation this equation reads
Cov[Y, X
t
] BCov[X, X
t
] (1.19)
from which it follows that
BCov[Y, X
t
]Cov[X, X
t
]
1
(1.20)
given that the covariance matrix of X is regular. This is the generalization of the regression coefcient b
in (1.8) to the regression coefcient matrix B of type (m, n) for the linear regression of Y on X.
The residual vector Y
E[Y[X] YBX has the covariance matrix
Cov[YBX, Y
t
X
t
B
t
] Cov[Y, Y
t
] Cov[Y, X
t
]B
t
BCov[X, Y
t
] +BCov[X, X
t
]B
t
Cov[Y, Y
t
] Cov[Y, X
t
]Cov[X, X
t
]
1
Cov[X, Y
t
] (1.21)
called the residual covariance matrix. Moreover,
Cov[YBX, X
t
] Cov[Y, X
t
] BCov[X, X
t
] 0 (1.22)
that is, the residual vector YBX and X is uncorrelated, and
Cov[YBX, Y
t
] Cov[Y, Y
t
] BCov[X, Y
t
] (1.23)
is the residual covariance matrix.
It is seen from(1.22) that if instead of requiring minimumof the mean square deviation (1.15) we may
equivalently require that the residual YBX is uncorrelated with X and that
E[
E[Y [ X]] E[Y] (1.24)
The linear regression
E[Y[X] E[Y] +B(XE[X]) (1.25)
has the important property of being linear in Y. In fact, let L
y
(Y) KY+k be any inhomogeneous linear
mapping of Y into L
y
(Y). Then it follows directly by substitution that
E[L
y
(Y)[X] L
y
(
E[Y[X]) (1.26)
a property that the linear regression has in common with the conditional expectation E[Y[X] with which
it coincides on the constant vectors.
Another important property shared with the conditional expectation E[Y[X] is that the linear regres-
sion
E[Y[X] is invariant to a one-to-one inhomogeneous linear mapping X L
x
(X) of the conditioning
vector X:
E[Y[L
x
(X)]
E[Y[X] (1.27)
If X consists of two subvectors X
1
and X
2
that are mutually uncorrelated, that is, Cov[X
1
, X
t
2
] 0, then
obviously,
E[Y [ X] E[Y] (
E[Y [ X
1
] E[Y]) +(
E[Y [ X
2
] E[Y]) (1.28)
Dimension Reduction and Discretization 9
This means that the linear regression of Y on X
1
(or X
2
) can be obtained from the linear regression of
Y on X by removing all terms that contain elements of X
1
(or X
2
). In particular, if the one-to-one inho-
mogeneous linear mapping X Z L
x
(X) in (1.27) is chosen such that Z has zero mean vector and the
unit matrix as covariance matrix, then (1.28) applies on any division of Z into subvectors. Thus the rel-
ative importance of the terms of
E[Y [ Z] BZ, B Cov[Y, Z
t
], can be directly studied by comparing the
residual covariance matrices Cov[Y, Y
t
] BB
t
and Cov[Y, Y
t
] B
1
B
t
1
, where B
1
is the matrix obtained from
B by removing those columns that correspond to the elements of Z whose importance are investigated.
Such investigations are particularly useful for the purpose of reduction of the dimension of randomness
in reliability and stochastic nite element calculations (Section 2.10).
In this introduction to linear regression let us generalize further. Consider a pair of randomprocesses
(X(t ), Y (t )). By direct generalization the linear regression of process Y on process X over the interval
[, ] takes the form
E[Y (t )[X] a(t ) +
_
B(t , )X()d (1.29)
where a(t ) and B(t , s) are functions that are determined from the condition
E[
E[Y (t )[X]] E[Y (t )] (1.30)
that corresponds to (1.16), and the condition
Cov[Y (t )
E[Y (t )[X], X(s)] 0 (1.31)
that corresponds to (1.22). From (1.29) and (1.30) it follows that
E[Y (t )] a(t ) +
_
B(t , )E[X()]d (1.32)
and (1.29) and (1.31) give the equation
Cov[Y (t ), X(s)]
_
B(t , )Cov[X(), X(s)]d (1.33)
In particular, if the process pair is stationary we have covariance functions c
Y X
and c
X
of one variable
such that (1.33) in the case , reduces to
c
Y X
(s t )
_
B(t , )c
X
(s )d (1.34)
or, by substituting u s t , v s :
c
Y X
(u)
_
B(s u, s v)c
X
(v)dv (1.35)
Since the left side is independent of s we may put s u. Thus
c
Y X
(u)
_
b(u v)c
X
(v)dv (1.36)
where b(x) B(0, x).
10 Structural Reliability
It follows from (1.33) or in the particular case of (1.36) that the determination of the linear regression
of process Y on process X amounts to solving an integral equation, knowing the covariance functions
Cov[X(s), X(t )] and Cov[X(s), Y (t )] of the process pair (X, Y ).
Example As an example consider a stationary process pair that is periodic with period 2. Then (1.36)
can be written as
c
Y X
(u)
_
2
0
h(u v)c
X
(v)dv (1.37)
where
h(x)
i
b(x +2i ) (1.38)
By a substitution test the reader may show that the regression coefcient function is
h(x)
1
n1
b
n
c
n
sin(nx) (1.39)
and that the residual covariance function is
c
Y
(u[X)
1
2
a
0
+
n1
[1
b
2
n
a
n
c
n
]a
n
cos(nu) (1.40)
where
a
n
_
2
0
c
X
(x)cos(nx)dx, n 0, 1, ... (1.41)
b
n
_
2
0
c
Y X
(x)sin(nx)dx, n 1, ... (1.42)
c
n
_
2
0
c
Y
(x)cos(nx)dx, n 0, 1, ... (1.43)
are the Fourier coefcients of c
X
, c
Y X
, and c
Y
, respectively.
Considered as a function of n the ratio [b
n
[/
_
a
n
c
n
is the so-called coherence function for the pair
(X, Y ) of random processes, and it is bounded in value between 0 and 1. The coherence function can
for each n be interpreted as the absolute value of the correlation coefcient between the nth Fourier
components of X and Y . This can be seen by comparing (1.10) and (1.40).
Atechnical applicationof the linear regressioninthis example concerns the modelling of randomsilo
load elds in vertical circular cylindrical silos. Let X(u) and Y (u) be the horizontal wall shear stress and
the wall normal stress, respectively, at the angular position u in a given horizontal plane. Assume that the
random eld (X(u), Y (u)) is homogeneous with respect to u with given covariance functions formulated
such that the entire wall stress eld is in global equilibrium. Then the linear regression
E[Y (u)[X] denes
a normal stress eld that is in global equilibrium with the shear stresses set to zero everywhere. Thus the
residual covariance function corresponds to a wall stress eld that acts normal to the wall and is in global
equilibrium. Such a wall stress eld may act on a horizontally ideally smooth silo wall [13].
Dimension Reduction and Discretization 11
1.3 Normal distribution
The standardized normal (or Gaussian) density
(x)
1
_
2
e
1
2
x
2
, x R (1.44)
is directly generalized to the n-dimensional standardized normal (or Gaussian) density
f
U
1
,...,U
n
(u
1
, ..., u
n
)
n
i 1
(u
i
) (
1
_
2
)
n
e
1
2
r
2
, (u
1
, ..., u
n
) R
n
(1.45)
where r
2
u
2
1
+... +u
2
n
. This density is rotational symmetric with respect to origo and the covariance ma-
trix of the random vector U(U
1
, ...,U
n
) is the unit matrix. According to the denition the random vari-
ables U
1
, ...,U
n
are mutually independent. The conditional density of any subvector of dimension m<n
given the complementary subvector of dimension n m is obviously the standardized m-dimensional
normal distribution. Moreover, any randomvector V(V
1
, ..., V
n
) obtained by an orthogonal mapping of
(U
1
, ...,U
n
) has the n-dimensional standardized normal density.
For any regular linear mapping X AU the random vector X (or the distribution of X) is said to be n-
dimensional normal (or Gaussian) withexpectationvector zeroandregular covariance matrix Cov[X, X
t
]
AA
t
. The density function is
f
X
(x) (
1
_
2
)
n
1
[det(A)[
exp{
1
2
x
t
Cov[X, X
t
]
1
x} (1.46)
where [det(A)[
_
det (Cov[X, X
t
]), (det(A) is the determinant of the square matrix A). Conversely, any X
with the density function (1.46) can in an innity of ways be written as a regular linear mapping X AU
of an n-dimensional standardized normal vector U. All that is needed is to determine A such that
AA
t
Cov[X, X
t
] (1.47)
It is required for the denition (1.46) of the n-dimensional normal density to make sense that detA / 0,
that is, that Cov[X, X
t
] is a regular matrix. In that case the n-dimensional normal distribution is character-
ized as being regular. However, a probability distribution can be obtained in R
n
by a limit passage where
Cov[X, X
t
] approaches a singular matrix. Then the entire probability mass in the limit becomes situated
on a subspace of R
n
the dimension of which is equal to the rank r of Cov[X, X
t
] (as obtained in the limit).
Then with probability 1 exactly n r of the random variables in X can be expressed as linear functions
of the remaining r random variables. These r random variables jointly have a regular r -dimensional
normal distribution. In any higher dimension than r the distribution is called singular normal.
Mathematical models of physical phenomena of engineering interest do not rarely contain nonlinear
functions of random vectors. A way to make such models accessible to analytical solution methods is to
replace themby linear models that in some sense are approximations to the nonlinear models. Phenom-
ena that strongly depends on the nonlinear nature of the models are lost in this way, of course, but other
properties such as the behavior of robust averages may be sufciently well represented for engineering
purposes by the approximating linear model.
In the sense of least mean square deviation the nonlinear function F(X) is best approximated by the
linear regression
E[F(X) [ X] E[F(X)] +Cov[F(X), X
t
]Cov[X, X
t
]
1
(XE[X]) (1.48)
12 Structural Reliability
It is seen that the calculation of the coefcients in this linear regression requires knowledge of the distri-
bution of X. If X is Gaussian it is convenient to use the representation XAU+E[X] with Ustandardized
Gaussian and A satisfying (1.47). Then F(X) F(AU+E[X]) may be written as G(U) and according to
(1.27) we have
E[F(X) [ X]
E[G(U) [ U] E[G(U)] +E[G(U)U
t
]U (1.49)
The ith element of E[G(U)U
t
] becomes
E[G(U)U
i
] E[E[G(U) [ U
i
]U
i
]
_
E[G(U) [ u
i
]u
i
(u
i
)du
i
_
E[G(U) [ u
i
](u
i
)
_
+
_
(u
i
)
d
du
i
E[G(U) [ u
i
]du
i
E
_
G(U)
u
i
[ u
i
_
(u
i
)du
i
E
_
G(U)
u
i
_
(1.50)
assuming that E[G(U) [ u
i
](u
i
) 0 for u
i
, and that G(u)/u
i
exists everywhere except for a set
of probability zero. Thus we have the result
E[G(U)U] E[gradG(U)] (1.51)
where gradG(u) is the gradient of the scalar eld G(u). By use of the chain rule of partial differentiation
it is easily seen that
gradG(U) A
t
gradF(X) (1.52)
such that (1.49) becomes
E[F(X) [ X] E[F(X)] +E[gradF(X)]
t
(XE[X]) (1.53)
By comparison with (1.48) it is seen that
Cov[F(X), X] Cov[X, X
t
]E[gradF(X)] (1.54)
is valid for any nonsingular Gaussian vector X.
Example In random vibration engineering it is often relevant to study an n degree of freedom damped
mass system with nonlinear restoring forces and subjected to Gaussian force process excitation. The
matrix equation of motion given in terms of the response X then reads
M
X+D
X+F(X) Y (1.55)
where M and D are mass and damping matrices, respectively, F(X) is the vector of nonlinear restoring
forces, and Y is the Gaussian vector process of force excitation. In general it is difcult to solve (1.55) to
obtain the probabilistic description of the response vector process X(t ). However, if (1.55) is replaced by
the linear differential equation
M
X+D
X+KXY (1.56)
where K is a suitably chosen stiffness matrix (that may be time dependent), then X becomes Gaussian.
One type of socalled (equivalent) stochastic linearization then assumes that X is Gaussian and on this
Dimension Reduction and Discretization 13
basis replaces the nonlinear restoring force F(X) (of zero mean) by the linear regression of F(X) on X. Thus
according to (1.53), K is dened as
KE[gradF(X)]
_
E
_
F
i
(X)
x
j
__
i , j 1,...,n
(1.57)
(i = row number, j = column number). The stiffness matrix is then determined iteratively by nding
the parameters of the Gaussian distribution of X from equations obtained from (1.56) with some initial
guess on K substituted, next using these parameters to calculate a new K from (1.57), and thereafter
proceed iteratively in the same way until a level of sufciently small changes is reached. This particular
procedure is called stochastic linearization using Gaussian closure. How much truth there is in the word
equivalent often used in connection with this technique can only be investigated for cases where exact
solutions are known, or by comparisons with empirical results obtained by simulation [14].
Now let us dene a random vector X(X
1
, ..., X
n
) recursively by the linear equations
X
1
1
U
1
X
2
b
21
X
1
+
2
U
2
.
.
.
X
n
b
n1
X
1
+... +b
n,n1
X
n1
+
n
U
n
(1.58)
where
1
, ...,
n
>0 and b
21
, ..., b
n,n1
are constant coefcients. By solution we get
X(I B)
1
U (1.59)
where I is the unit matrix, ]
1
...
n
] is a diagonal matrix, and
B
_
_
_
_
0 0 0 0
b
21
0 0 0
b
n1
b
n2
b
n,n1
0
_
_
_
_
(1.60)
Clearly IBis regular so that the solution (1.59) exists. Thus X has a normal distribution with expectation
vector zero and covariance matrix
Cov[X, X
t
] (I B)
1
[(I B)
1
]
t
(1.61)
for which the inverse is
Cov[X, X
t
]
1
[
1
(I B)]
t
1
(I B) (1.62)
where
1
(IB) as well as (IB)
1
are lower triangular matrices, that is, all elements above the diagonal
are zero.
If the covariance matrix Cov[X, X
t
] is given and is regular, a lower triangular matrix A can be uniquely
determined by Choleski decomposition of Cov[X, X
t
] such that (1.47) is satised. Thus (I B)
1
and its
inverse
1
(I B) can be determined uniquely by Choleski decomposition of Cov[X, X
t
] and Cov[X, X
t
]
1
,
respectively, implying that any Gaussian random vector X of zero expectation and regular covariance
matrix can be written uniquely as in (1.58).
14 Structural Reliability
Obviously the linear regression
E[X
i
[X
1
, ..., X
i 1
] b
i 1
X
1
+... +b
i ,i 1
X
i 1
(1.63)
coincides with the conditional expectation E[X
i
[X
1
, ..., X
i 1
], and the residual variance
Var[X
i
E[X
i
[X
1
, ..., X
i 1
]]
2
i
(1.64)
coincides with the conditional variance Var[X
i
[X
1
, ..., X
i 1
]. However, writing X
k
(X
1
, ..., X
k
) we more
generally have that
E[X
i
[X
k
]
E[X
i
[X
k
] (1.65)
and
Cov[X
i
, X
j
[X
k
] Cov[X
i
E[X
i
[X
k
], X
j
E[X
j
[X
k
]] (1.66)
for any i , j , k {1, ..., n}. The proofs of (1.65) and (1.66) are as follows.
The coincidence of the conditional expectation of X
i
given X
k
and the linear regression of X
i
on X
k
follows fromthe equations (1.58) using the one-to-one correspondence between(X
1
, ..., X
k
) and(U
1
, ...,U
k
).
Thus we may replace the conditioning on X
k
by conditioning on U
k
(U
1
, ...,U
k
). Since
E[U
i
[U
k
]
E[U
i
[U
k
]
_
U
i
for i k
0 for i >k
(1.67)
it follows that (1.58) gives the same equations for the conditional expectations and the linear regressions.
The unique solution is given by (1.59) replacing U by E[U[U
k
].
Similarly the conditional covariances Cov[X
i
, X
j
[X
k
] can be obtained from(1.58) replacing X
i
andU
i
for i {1, ..., n} by Cov[X
i
, X
j
[X
k
] and Cov[U
i
, X
j
[U
k
], respectively, for each j {1, ..., n}. The solution is
obtained from (1.59) as
Cov[X, X
t
[X
k
] (I B)
1
Cov[U, X
t
[U
k
] (1.68)
where, according to (1.59),
Cov[U, X
t
[U
k
] Cov[U, U
t
[U
k
][(I B)
1
]
t
(1.69)
and
Cov[U
i
,U
j
[U
k
]
_
1 for i j [ {1, ..., k}
0 otherwise
(1.70)
It is seen that the conditional covariance does not depend on the value of X
k
implying that
E[Cov[X, X
t
[X
k
]] Cov[X, X
t
[X
k
] (1.71)
The residual covariance matrix is
Cov[X
E[X[X
k
], X
t
E[X
t
[X
k
]] Cov[XE[X[X
k
], X
t
E[X
t
[X
k
]]
E[Cov[X, X
t
[X
k
]] +Cov[E[XE[X[X
k
][X
k
], E[X
t
E[X
t
[X
k
][X
k
]]
Cov[X, X
t
[X
k
] (1.72)
Dimension Reduction and Discretization 15
whichproves (1.66). Thus we have the important result that the conditional covariance matrix is identical
to the residual covariance matrix.
For n 2 and Var[X
1
] Var[X
2
] 1 we have
Cov[X, X
t
]
_
1
1
_
_
1 0
_
1
2
__
1
0
_
1
2
_
(1.73)
so that X
1
U
1
, X
2
X
1
+
2
U
2
where
2
_
1
2
. The joint density of (X
1
, X
2
) is
f
X
1
,X
2
(x
1
, x
2
) f
X
2
(x
2
[X
1
x
1
) f
X
1
(x
1
)
_
x
2
x
1
2
_
(x
1
)
1
2
2
exp
_
1
2
2
2
[(x
2
x
1
)
2
+(1
2
)x
2
1
]
_
1
2
_
1
2
exp
_
1
2(1
2
)
(x
2
1
2x
1
x
2
+x
2
2
)
_
(1.74)
This density function is as a standard denoted as
2
(x
1
, x
2
; ).
For n 3 and Var[X
1
] Var[X
2
] Var[X
3
] 1 we have
Cov[X, X
t
]
_
_
1
12
13
12
1
23
13
23
1
_
_
AA
t
(1.75)
with
A
_
_
_
_
_
1 0 0
12
2
0
13
23
12
13
_
1
2
12
3
_
_
_
_
_
(1.76)
where
_
1
2
12
(1.77)
_
1
2
12
2
13
2
23
+2
12
13
23
1
2
12
(1.78)
so that
X
1
U
1
X
2
12
U
1
+
2
U
2
12
X
1
+
2
U
2
X
3
13
U
1
+
23
12
13
_
1
2
12
U
2
+
3
U
3
13
12
23
_
1
2
12
X
1
+
23
12
13
_
1
2
12
X
2
+
3
U
3
(1.79)
16 Structural Reliability
The joint density of (X
1
, X
2
, X
3
) is
f
X
1
,X
2
,X
3
(x
1
, x
2
, x
3
)
f
X
3
(x
3
[X
1
x
1
, X
2
x
2
) f
X
2
(x
2
[X
1
x
1
) f
X
1
(x
1
)
_
x
3
b
31
x
1
b
32
x
2
3
_
1
_
x
2
b
21
x
1
2
_
(x
1
)
_
1
2
_
3/2
1
3
exp
_
1
2(
2
3
)
2
_
(1
2
23
)x
2
1
+(1
2
13
)x
2
2
+(1
2
23
)x
2
3
2(
12
13
23
)x
1
x
2
2(
13
12
23
)x
1
x
3
2(
23
12
13
)x
2
x
3
__
(1.80)
Finally, an n-dimensional vector X with expectation E[X] is said to be normal or Gaussian, if Y X
is Gaussian.
1.4 Non-Gaussian distributions and linear regression
In the previous section it is shown that the multi-dimensional normal distribution has the property that
the conditional expectation of any normal vector Y given any normal vector X is coincident with the
linear regression of Y on X provided the joint distribution of (X, Y) is normal. Non-Gaussian distributions
do generally not have this property. It is easy to see that if the conditional expectation
E[Y[X]
_
R
n
yf
Y
(y[X)dy (1.81)
is linear in X, then E[Y[X]
E[Y[X]. This follows fromthe fact that the expectation of any randomvariable
is equal to the value relative to which the mean square deviation of the random variable is smallest.
However, the conditional covariance matrix Cov[Y, Y
t
[X] may vary with X and thus be different from the
residual covariance matrix Cov[Y
E[Y[X], Y
t
E[Y
t
[X]].
Important classes of m-dimensional non-Gaussian distributions can be dened by suitable non-
linear transformations of a normal vector X. The simplest and most often used type of non-linear trans-
formation maps each element X
i
of X into Y
i
g
i
(X
i
), where g
1
, ..., g
m
are non-linear increasing func-
tions of one variable. This type of m-dimensional transformation may conveniently be denoted as an
increasing marginal transformation.
Let g (g
1
, g
2
) be anincreasing marginal transformationof the normal vector (X, Y). Obviously the lin-
ear regression
E[g
2
(Y)[g
1
(X)] is generally not simply relatedtothe conditional expectationE[Y[X]
E[Y[X]
or to the conditional expectationE[g
2
(Y)[g
1
(X)] (except, of course, if g is linear). However, it canbe gener-
ally stated that g
2
(
E[Y[X]) is the marginal median point of the conditional density of g
2
(Y) given g
1
(X) (or
given X g
1
1
[g
1
(X)]), that is, any given element of g
2
(Y) takes a value below or above the corresponding
element value of g
2
(
E[Y[X]) with probability 1/2. Generally the point g
2
(
E[Y[X]) is simpler to calculate
than the conditional expectation point E[g
2
(Y)[g
1
(X)].
Example In practice the most frequently used increasing marginal transformation is the exponential
transformation g
i
(x) e
x
, i 1, ..., n: Dene logX (logX
1
, ..., logX
n
) as a normal vector. Then X is said
to have a lognormal distribution. The relations between E[logX], Cov[logX, logX
t
] and E[X], Cov[X, X
t
] are
E[X]
_
exp
_
E[logX
i
] +
1
2
Var[logX
i
]
__
i 1,...,n
(1.82)
Dimension Reduction and Discretization 17
E[logX]
_
logE[X
i
] +
1
2
log(1+V
2
X
i
)
_
i 1,...,n
(1.83)
Cov[X, X
t
]
_
[exp(Cov[logX
i
, logX
j
]) 1]E[X
i
]E[X
j
]
_
i , j 1,...,n
(1.84)
Cov[logX, logX
t
]
_
log
_
1+
Cov[X
i
, X
j
]
E[X
i
]E[X
j
]
__
i , j 1,...,n
(1.85)
Let (X, Y) be a lognormal vector, X of dimension m, Y of dimension n. Then the conditional distribution
of Y given X is n-dimensional lognormal. According to (1.82) to (1.84) the conditional expectation of Y
i
given X becomes
E[Y
i
[X] E[Y
i
[logX]
exp(E[logY
i
[logX] +
1
2
Var[logY
i
[logX])
exp(
E[logY
i
[logX] +
1
2
Var[logY
i
E[logY
i
[logX]])
exp
_
E[logY
i
] +Cov[logY
i
, logX
t
]Cov[logX, logX
t
]
1
(logXE[logX])
+
1
2
(Var[logY
i
] Cov[logY
i
, logX
t
]Cov[logX, logX
t
]
1
Cov[logX, logY
i
])
_
(1.86)
Thus E[Y
i
[X] depends nonlinearly on X and is therefore different from
E[Y
i
[X]. If the variance term is
neglected we get the marginal median point exp(
E[logY
i
[logX]).
The conditional covariance between Y
i
and Y
j
given X becomes
Cov[Y
i
, Y
j
[X] Cov[Y
i
, Y
j
[logX]
_
exp(Cov[logY
i
, logX
j
[logX]) 1
_
E[Y
i
[X]E[Y
j
[X] (1.87)
where Cov[logY
i
, logX
j
[logX] is equal to the covariance between the linear regression residuals logY
i
E[logY
i
[logX] and logY
j
E[logY
j
[logX], and therefore does not depend on X. However, the conditional
expectation factors in (1.87) depend on X as shown in (1.4).
The linear regression
E[Y[X] plays no particular interesting role in the lognormal distribution except
that
E[Y[X] is that linear function of X that approximates the conditional expectation E[Y[X] best in the
sense of minimizing the expected squared difference E[(E[Y[X]
E[Y[X])
2
].
1.5 Marginally transformed Gaussian processes and elds
As stated in the introduction section the word eld will in the following be used as short for random
process or random eld. A eld X(t ) is said to be Gaussian if the random vector corresponding to any
nite subset {t
1
, ..., t
n
} of the index set I is a Gaussian vector. A Gaussian eld is completely dened by the
expectation or mean value function (t ) E[X(t )] and the covariance function c(s, t ) Cov[X(s), X(t )].
The last function must be nonnegative denite:
t
1
, ..., t
n
I :
_
c(t
i
, t
j
) c(t
j
, t
i
)
and x
1
, ..., x
n
R:
n
i 1
n
j 1
c(t
i
, t
j
)x
i
x
j
0
_
(1.88)
18 Structural Reliability
Giventhat I R
q
for some q, a eld is said to be homogeneous (or stationary, if the word eld stands for
randomprocess) within I if the joint distribution of (X(t
1
), ..., X(t
n
)) is identical to the joint distribution
of (X(t
1
+), ..., X(t
n
+)) for any {t
1
, ..., t
n
} I and any such that {t
1
+, ..., t
n
+} I .
A Gaussian eld is homogeneous if and only if (t ) is a constant and the covariance function c(s, t ) is
a function solely of the difference t s. If this condition is satised for a non-Gaussian eld the eld is
not necessarily homogeneous but it is then said to be weakly homogeneous or homogeneous up to the
second order moments.
Let Y (t ) be a Gaussianeldwithzeromeanvalue functionE[Y (t )] 0, unit variance functionVar[Y (t )]
1, and correlation function (s, t ) [Y (s), Y (t )]. Moreover, let g(x, t ) be some function of x R and t I
for which
_
g(x, t )(x)dx 0,
_
g(x, t )
2
(x)dx 1 (1.89)
and let (t ) and (t ) >0 be given functions of t I . Then the eld
X(t ) (t ) +g[Y (t ), t ](t ) (1.90)
has mean value function (t ), variance function (t )
2
, and correlation function
[X(s), X(t )]
_
g(x, s)g(y, t )
2
[x, y; (s, t )]dx dy (1.91)
The eld X(t ) is said to be obtained by a marginal transformation of the eld Y (t ), and it is Gaussian
if g(x, t ) is a linear function in x. According to (1.89) this linear function then must be g(x, t ) x, and
(1.91) gives [X(s), X(t )] [Y (s), Y (t )] (s, t ). If (t ), (t ) as well as the marginal transformation is
independent of t I , and Y (t ) is homogeneous, then X(t ) is also homogeneous, and (1.91) simplies to
r (t )
_
g(x)g(y)
2
[x, y; (t )]dx dy (1.92)
where r (t s) [X(s), X(t )] and (t s) [Y (s), Y (t )].
We may now quite naturally ask the question of whether it is always possible to determine the cor-
relation function (t ) of the Gaussian process such that a given nonnegative denite function r (t ) is the
correlation function for the homogeneous eld X(t ) g[Y (t )]. The answer is negative. By the right side
of (1.92) the set of nonnegative denite functions is in general mapped into a genuine subset of the set
of nonnegative denite functions. In other words, it is not granted that the integral equation (1.92) for a
given nonnegative denite function r (t ) has a solution (t ) in the set of nonnegative denite functions.
If a nonnegative denite solution exists the eld X(t ) g[Y (t )] is well dened with zero mean value, unit
variance and given correlation function r (t ). This type of homogeneous non-Gaussian eld is called a
zero mean, unit variance homogeneous Nataf eld [15, 16].
Example Let I R and
X(t ) exp[a +bY (t )] (1.93)
such that for any given t R, X(t ) has a lognormal distribution. The mean and the variance
2
are
given by
e
a+bx
(x)dx e
a+b
2
/2
(1.94)
Dimension Reduction and Discretization 19
(
)
2
2
_
e
2(a+bx)
(x)dx 1 e
b
2
1 (1.95)
consistent with (1.82) and (1.84). Thus
a log(/
_
1+X
2
) (1.96)
b
_
log(1+V
2
) (1.97)
where V / is the coefcient of variation of X(t ). Then
g(x)
1
V
_
_
e
x
_
log(1+V
2
)
_
1+V
2
1
_
_
(1.98)
Substitution into (1.92) leads to a solvable integral. We get
r (t )
1
V
2
_
(1+V
2
)
(t )
1
_
(1.99)
which by solution with respect to (t ) gives
(t )
log[1+V
2
r (t )]
log(1+V
2
)
(1.100)
consistent with (1.84) and (1.85). It can by examples be shown that there exist positive denite functions
r (t ) for which (1.100) gives functions (t ) that are not positive denite.
In scientic or engineering applications it is usually so that the eld X(t ) has a physical interpretation
and that X(t ) must satisfy some physical or geometrical conditions. For example, it may be so that X(t )
of physical reasons should be positive for all t . Often a model with X(t ) being Gaussian is applicable
in spite of the physical condition of nonnegativity, simply because X(t ) may have so small a coefcient
of variation that the probability of getting negative values of X(t ) is small as compared to the calculated
probability of any event that is relevant for the engineering application. However, for larger coefcients of
variation of X(t ) the Gaussian assumption may be in too gross conict with the nonnegativity condition
to be applicable. Then often the lognormal eld or some other nonnegative marginal transformation of
a Gaussian eld is adopted as X(t ).
If the model is obtained solely by tting to data there will be no inconsistency in the covariance func-
tion modelling if all data are transformed inversely to data that are assumed to comply with a Gaussian
eld model. However, in some cases it may be so that X(t ) satises some physical equation. For exam-
ple, if X(t ) models the normal pressure on the wall of a vertical cylindrical silo with horizontally ideally
smooth wall, the horizontal equilibrium of the silo medium requires that X(t ) satises three global equi-
libriumequations that are linear in X(t ). These equations put restrictions on the choice of the covariance
function of X(t ) among the nonnegative denite functions. Therefore, starting the modelling by obey-
ing these equilibrium conditions and thereafter assuming that X(t ) is a homogeneous lognormal eld,
say, requires careful consideration of the nonnegative deniteness of (t ) in (1.100) when a modelling
candidate for r (t ) has been chosen. The nonlinear relation between r (t ) and (t ) usually requires some
corrective steps to be taken [17].
20 Structural Reliability
1.6 Discretized elds dened by linear regression on a nite set of
eld values
The linear regression of a eld X(t ) on a nite set X
n
(X(t
1
), ..., X(t
n
)) of random variables of the eld
with regular covariance matrix Cov[X
n
, X
t
n
] is
E[X(t )[X
n
] (t ) +Cov[X(t ), X
t
n
]Cov[X
n
, X
t
n
]
1
(X
n
n
) (1.101)
where (t ) E[X(t )] and
n
((t
1
), ..., (t
n
)). The linear regressiondenes a eld
X(t [t
1
, ..., t
n
)
E[X(t )[X
n
]
that may be said to have a dimension of randomness equal to n. Since
X(t
i
[t
1
, ..., t
n
) X(t
i
) (1.102)
the eld
X(t
i
[t
1
, ..., t
n
) interpolates between the values X(t
1
), ..., X(t
n
) of the eld X(t ). The covariance
functions of the row matrix Cov[X(t ), X
t
n
] play the role as deterministic interpolation functions (shape
functions). The mean value function is identical for the two elds. The covariance function is
Cov[
E[X(s)[t
1
, ..., t
n
],
E[X(t )[t
1
, ..., t
n
]] Cov[X(s), X
t
n
]Cov[X
n
, X
t
n
]
1
Cov[X
n
, X(t )] (1.103)
which added to the residual covariance function, see (1.2), gives the covariance functionCov[X(s), X(t )]
of the eld X(t ).
In numerical calculations with elds it is most often necessary to discretize the elds in the sense of
replacing elds of innite dimension of randomness by approximating elds of nite dimension of ran-
domness. This replacement is called random eld discretization. It depends on the considered problem
and the related error measure, which type of random eld discretization is most effective and opera-
tionally convenient.
As mentioned in the introduction section the replacement of X(t ) by
E[X(t )[X
n
] is sometimes called
kriging. The error of the calculation output comes from neglecting the residual eld X(t )
E[X(t )[X
n
],
an error that in some problems can be crudely evaluated at the output level by repeated calculations
using different dimensions of randomness of the discretized eld. Field discretization different from the
kriging method, but all based on linear regression in one or the other form, will be treated in several of
the following sections.
The linearity of
E[X(t )[X
n
] with respect to X(t ) directly shows that if t is a parameter for which we
can talk about differentiability or integrability of X(t ), and X(t ) has such differentiability or integrability
properties, then
E[dX(t )[X
n
] d
E[X(t )[X
n
] (1.104)
and
E[
_
X(t )dt [X
n
]
_
E[X(t )[X
n
]dt (1.105)
where the integration is over any suitably regular set I .
1.7 Discretization dened by linear regression on nite set of linear
functionals
In stochastic mechanics applications of random elds the elds often appear as integrands in the so-
lutions to the relevant equations. For example, several types of load intensities acting on a structure
Dimension Reduction and Discretization 21
can conveniently be modelled as random elds. The internal stresses and the displacements caused
by the acting load are functions of weighted integrals (i.e. linear functionals) of the load intensity over
the structure. Another example concerns constitutive relations that contain spatially varying parameters
modelled as outcomes of random elds. Macroscopic effects of such variation generally are determined
by weighted integrals of the constitutive parameters over the structure. Numerical approximations to
the solutions may therefore in both examples be improved with respect to accuracy if the eld discretiza-
tions are made such that a selected set of relevant linear functionals are not affected by the discretization.
Linear regression on the set of linear functionals serves this purpose [18].
Let F
1
, ..., F
n
be n different linear functionals denedonthe eld X(t ), andlet
X(t ) be the elddened
by the linear regression
X(t )
E[X(t )[F{X}] (1.106)
where F{X} (F
1
{X}, ..., F
n
{X}). The linearity of the linear regression ensures that the linear functionals
are invariant to the replacement of X(t ) by
X(t ):
F{
X}
E[F{X}[F{X}] F{X} (1.107)
The linear regression reads:
E[X(t )[F{X}] E[X(t )] +Cov[X(t ), F{X}
t
]Cov[F{X}, F{X}
t
]
1
(F{X} E[F{X}])
E[X(t )] +F
v
{Cov[X(t ), X(v)]}
t
(F
u
F
t
v
{Cov[X(u), X(v)]})
1
F{X E[X]} (1.108)
where the indices u and v indicate that F operates on the functions of u and v, respectively.
Next consider any linear functional G dened both on X(t ) and
X(t ). Then the discretization error
with respect to G is
G{X} G{
X} G{X}
E[G{X}[F{X}] (1.109)
that is, the discretization error is the residual corresponding to the linear regression of G{X} on F{X}.
Thus the variance of the discretization error is
Var[G{X} G{
X}] Var[G{X}] Cov[G{X}, F{X}
t
](F
u
F
t
v
{Cov[X(u), X(v)]})
1
Cov[G{X}, F{X}]
G
s
G
t
_
Cov[X(s), X(t )] F
u
{Cov[X(s), X(u)}
t
_
F
u
F
t
v
{Cov[X(u), X(v)]}
_
1
F
v
{Cov[X(t ), X(v)]}
_
(1.110)
where the indices s and t indicate that G operates on the functions of s and t , respectively. Thus the
residual variance is obtained by application of the bilinear functional G
s
G
t
to the residual covariance
function corresponding to the linear regression of the eld X on the vector of linear functionals F{X}.
Example Consider a beam resting on a linear elastic bed of stiffness S(x) at the point x, and subdivide
the length of the beaminto intervals [x
0
, x
1
], ..., ]x
m1
, x
m
]. A displacement function u(x) of the formas a
polynomial of nth degree generates a reaction load intensity eld that over the interval ]x
i 1
, x
i
] has the
following resulting vertical reaction and moment with respect to x 0:
_
x
i
x
i 1
u()S()d
n
j 0
a
j
_
x
i
x
i 1
j
S()d (1.111)
22 Structural Reliability
_
x
i
x
i 1
u()S()d
n
j 0
a
j
_
x
i
x
i 1
j +1
S()d (1.112)
respectively. With S(x) being a eld these reactions and moments are not affected by replacing S(x) by
the discretized eld
S(x) dened as the linear regression of S(x) on the m(n +2) linear functionals
F
i j
{S}
_
x
i
x
i 1
j
S()d; i 1, ..., m; j 0, ..., n +1 (1.113)
for all displacements that vary as a polynomial of at most nth degree (or just as a function that within
each of the subintervals vary as a polynomial of at most nth degree).
Example Assume that the exibility (compliance) of a linear elastic Euler-Bernoulli beam is modelled
as a eld C(x), and consider a straight beam element over the interval [L, L] loaded externally from
the neighbour elements at the end points and by a distributed load varying as a polynomial of (n 2)th
degree along the beam axis and acting orthogonal to the axis. Thus the bending moment M(x) in the
beam varies as an nth degree polynomial. It then follows from the principle of virtual work that the total
angular rotation over [L, L] and the displacement of the one end point orthogonal to the tangent at the
other end point have the form
_
L
L
C(x)M(x)dx
n
j 0
a
j
_
L
L
x
j
C(x)dx (1.114)
_
L
L
xC(x)M(x)dx
n
j 0
a
j
_
L
L
x
j +1
C(x)dx (1.115)
respectively. Thus the macro exibility properties of the beam element ranging over [L, L] are invariant
to the replacement of C(x) by
C(x) dened as the linear regression of C(x) on the n+2 linear functionals
F
j
{C}
_
L
L
x
j
C(x); j 0, ..., n +1 (1.116)
Example Consider a plane straight or curved beamwith the beamaxis completely dened in terms of the
natural equation representation {s, (s)}, where s is the arch length along the beam axis and (s) is the
angle between the tangent at s and the tangent at the origin of s. The beam is subjected to the random
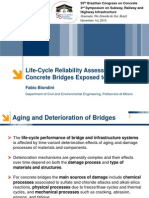
load intensity elds p(s) and q(s) acting in the plane of the beam orthogonal and tangential to the beam
axis, respectively, Fig. 1.
Dimension Reduction and Discretization 23
Figure 1. Top left: Load elds p(s) and q(s). Top right: Indirect loading on simply supported beams.
Bottom left: Support forces from simple beams. Bottom right: Discretized replacement load elds p(s) and
q(s) dened as the linear regressions of p(s) and q(s) on the support forces.
First let us assume that the beam structure is statically determinate. If we let the load elds act in-
directly through a row of beams that are simply supported on the given beam, the internal forces in the
beamare the same at the supports of the simply supported beams as in the directly loaded beam. There-
fore a representation of the random load elds by the corresponding orthogonal and tangential random
support forces of the simple beams is sufcient for the stochastic representation of the internal forces
at these discretization points. However, if the beam is statically indeterminate the redundants are func-
tionals of the directly acting load elds causing that the internal forces at the discretization points do not
become error free if the directly acting load elds are replaced by the eld of the concentrated support
forces. This effect becomes more dominant for coarser discretization. An illustrative example is an Euler-
Bernoulli beam of shape as a circular ring with uniform load eld acting orthogonal to the beam axis.
This directly acting load eld causes a normal force but no bending moments in the beam. However, any
system of indirect loading will generate non-zero bending moments that become at their extreme level
if the discretization is chosen so coarse as to be dened by only two diametrically opposite points, Fig.
2. Obviously this undesirable discretization effect is counteracted by reintroducing a directly acting load
eld that has some similarity with the given load eld. This is achieved by using the linear regression of
the given load eld on the set of statically equivalent support forces as the replacement load eld. Thus
24 Structural Reliability
the method of regression on linear functionals in combination with the principle of indirect loading is a
rational tool for stochastic nite element discretization of random load elds on beam structures [19].
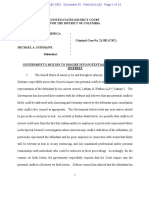
Figure 2. Left: Uniformly loaded circular ring carrying the load solely by tension. Right: The most coarse
discretizationof the loadeldinto the support forces of two simple beams. The ring ovalizes due to bending.
The linear regression p
E[p [ pD] p reestablishes the uniform load intensity.
At a discretization point let X X
+
+X
and Y Y
+
+Y
be the orthogonal and tangential support
forces, respectively, from the two adjacent simply supported imaginary beams assumed to carry the di-
rect load elds over to the given beam structure. Let the origin of the arch length parameter s be at the
discretization point. The support forces coming from the imaginary simply supported beam of span L
+
on the positive side of the origin and from the imaginary simply supported beam of span L
on the neg-
ative side of the origin are X
+
, Y
+
and X
, Y
respectively. The 4 support forces are linear functionals of
the load elds p(s) and q(s), and they depend solely on the natural equation representation {s, (s)} in
the interval fromL
to L
+
. The corresponding 8 inuence functions I
+
np
(s), I
+
nq
(s), I
+
t p
(s), I
+
t q
(s), I
np
(s),
I
nq
(s), I
t p
(s), I
t q
(s) are derived from elementary static analysis.
The principle of indirect loading suggests that it may be sufcient to let the replacement load elds
p(s) and q(s) be the linear regressions on the resulting support forces X X
+
+ X
and Y Y
+
+Y
at all discretization points instead of being the linear regressions on the individual forces X
+
, X
, Y
+
, Y
at these points. Thereby the number of discretization variables are reduced to the half on the expense
of an increased residual variance. Clearly, in the limit where the load elds on the positive side of the
origin are stochastically independent of the load elds on the negative side of the origin, p(s) and q(s)
for s >0 should depend only on X
+
, Y
+
and not on X
, Y
, that is, if p(s) and q(s) are dened as the linear
regressions on X and Y , then X
and Y
add irrelevant random contributions to the replacement elds
to be applied for s >0.
1.8 Poisson Load Field Example
The material of this section is mathematically very technical and it is not used subsequently. The section
serves to illustrate that the method of linear regression on linear functionals is applicable even to replace
a load eld with sample curves of highly singular nature by a discretized almost statically equivalent
load eld with continuous sample curves [18]. The considered example is of a class for which the direct
kriging method is not applicable. However, the example is perfectly relevant for investigations concern-
ing load effects from load elds of intermittent type as for example trafc load elds. The eld is a ho-
Dimension Reduction and Discretization 25
mogeneous Poisson stream of single forces acting orthogonal to a straight line axis, Fig. 3. For simplicity
the load eld is taken to be extended along the entire axis fromto , even though the actual loaded
beam has nite length. The mean number of Poisson points per length unit is , and the sequence of
random forces F
i
assigned to the sequence of Poisson points are assumed to be mutually independent,
independent of the Poisson process, and all distributed as a given random variable F. According to the
discretization principle of indirect loading explained in the last example of the previous section, we let
the load eld be applied to a row of imaginary simply supported beams of span L. For convenience we
take L as length unit and choose the origin of the axis at the end point of an interval . Thus the Poisson
process on a dimensionless s-axis has the intensity L.
First we will consider the particular situation where a single force F is placed at random within the
interval of the rst three units. The nodal forces X
1
and X
2
at the abscissas 1 and 2 caused by the force
F are X
1
FI
1
(U) and X
2
FI
2
(U), respectively, where I
1
(s) s1
s[0,1]
+(2 s)1
s[1,2]
and I
2
(s) (s
1)1
s[1,2]
+(3s)1
s[2,3]
are the inuence functions, and whereU is a randomvariable which is uniformly
distributed between 0 and 3. For a force placed outside the interval from 0 to 3, the nodal forces at 1 and
2 are zero. Clearly X
1
and X
2
are identically distributed with nth order moment
E[X
n
i
] E[F
n
(U
n
1
U[0,1]
+(2U)
n
1
U[1,2]
)] 2E[F
n
]E[U
n
1
x[0,1]
]
2
3(n +1)
E[F
n
] (1.117)
giving E[X
i
]
1
3
E[F], Var[X
i
]
2
9
E[F
2
]
1
9
E[F
2
]
2
9
Var[F] +
1
9
E[F]
2
and
E[X
1
X
2
] E
_
F
2
(2U)(U 1)1
U[1,2]
_
E
_
F
2
(1U)U1
U[0,1]
_
1
18
E[F
2
] (1.118)
so that the covariance between X
1
and X
2
becomes
Cov[X
1
, X
2
]
1
18
E[F
2
]
1
9
E[F]
2
1
18
(Var[F] E[F]
2
) (1.119)
If N forces are placed independently and at random in the interval from 0 to 3, the points will be dis-
tributed exactly as the points in a realization of a homogeneous Poisson process given that there are N
points within the interval. Conditional on N, the mean, variance, and covariance are obtained by apply-
ing the factor N onthe above results. Using that E[N] Var[N] for a Poissondistribution, unconditioning
gives
E[X
i
]
1
3
E[F]E[N] (1.120)
Var[X
i
] E[Var[X
i
[N]] +Var[E[X
i
[N]]
_
2
9
Var[F] +
1
9
E[F]
2
_
E[N] +
_
1
3
E[F]
_
2
Var[N]
2
9
E[F
2
]E[N] (1.121)
Cov[X
1
, X
2
] E[Cov[X
1
, X
2
[N]] +Cov[E[X
1
[N], E[X
2
[N]]
_
1
18
E[F
2
]
1
9
E[F]
2
_
E[N] +
_
1
3
E[F]
_
2
Var[N]
1
18
E[F
2
]E[N] (1.122)
where E[N] 3L. It follows from this that the homogeneous sequence of random nodal forces X
i
, i
..., 2, 1, 0, 1, 2, ... has the mean and the covariances
E[X
i
] E[F]L (1.123)
26 Structural Reliability
Cov[X
i
, X
j
]
1
6
(
i ( j 1)
+4
i j
+
i ( j +1)
)LE[F
2
] (1.124)
respectively, where
i j
is Kroneckers delta.
Figure 3. Poissontrafc load eld discretized into analmost statically equivalent continuous and piecewise
linear load eld dened within any nite interval by a nite non-random number of random variables.
To obtain the linear regression p(s) of the Poisson load eld p(s) on the sequence of nodal forces X
i
,
we need to invert the covariance matrix of innite order, and to calculate the covariances Cov[X
i
, p(s)].
Noting that
j
(
i ( j 1)
+4
i j
+
i ( j +1)
)a
[kj [
_
a
[ki 1[
(a
2
+4a +1) for k /i
2a +4 for k i
(1.125)
it follows that this expression is proportional to
i k
only for a (
_
3+2) or a
_
32. Since a
[i j [
is
bounded as [ i j [ only for the last value of a for which the constant of proportionality is 2
_
3, it
follows that the inverse covariance matrix is the matrix of innite order with the element in ith row and
jth column equal to
_
3(LE[F
2
])
1
a
[i j [
(1.126)
with a (
_
32)
1
(
_
3+2).
Dimension Reduction and Discretization 27
The mean load intensity obviously is
E[p(s)] E[X
i
] (1.127)
For the covariances Cov[X
i
, p(s)] we rst consider the case N 1. Then for h >0 and as h 0:
E[X
i
p(s)] lim
h0
E
_
FI
i
(U)1
U[s,s+h]
F
h
_
E[F
2
]lim
h0
_
1
h
E[I
i
(U)1
U[s,s+h]
]
_
E[F
2
]lim
h0
_
1
h
E[I
i
(s)1
U[s,s+h]
]
_
1
3
E[F
2
]I
i
(s) (1.128)
so that Cov[X
i
, p(s)]
1
3
E[F
2
]I
i
(s)
1
9
E[F]
2
. Then
Cov[X
i
, p(s)[N] {3E[F
2
]I
i
(s) E[F]
2
}N/9 (1.129)
Unconditioning with respect to N nally gives
E[p(s)] E[E[p(s)[N]] E
_
E
_
F
h
1
U[s,s+h]
_
N
_
1
3
E[F]E[N] LE[F] (1.130)
Cov[X
i
, p(s)]
1
9
_
3E[F
2
]I
i
(s) E[F]
2
_
E[N] +
1
3
E[X
i
]E[F]Var[N]
1
3
E[N]E[F
2
]I
i
(s) LE[F
2
]I
i
(s) (1.131)
where
I
i
(s) (s i +1)1
s[i 1,i [
+(i +1s)1
s[i ,i +1]
(1.132)
The linear regression p(s) of p(s) on the sequence of nodal forces X
i
is calculated as follows:
1
_
3
p(s)
1
_
3
LE[F] +
i
I
i
(s)
j
a
[i j [
[X
j
LE[F]]
j
X
j
i
I
i
(s)a
[i j [
j
X
j
k
I
k+j
(s)a
[k[
j
X
j
[s]j +1
k[s]j
I
0
(s k j )a
[k[
j
X
j
_
I
0
(s [s])a
[[s]j [
+I
0
(s [s] 1)a
[[s]j +1[
_
k
_
X
k+[s]
I
0
(s [s]) +X
k+[s]+1
I
0
(s [s] 1)
_
a
[k[
(1.133)
in which [s] is the integer part of s. It is seen that p(s) is obtained by linear interpolation between the
adjacent random variables Y
[s]
, Y
[s]+1
in the sequence
{Y
i
} {
_
3
k
X
i +k
a
[k[
} (1.134)
This is illustrated in Fig. 3. The mean and the covariances are
E[Y
i
]
_
3
k
E[X
i +k
]a
[k[
E[X
i
] E[p(s)] (1.135)
28 Structural Reliability
Cov[Y
i
, Y
j
] 3
l
Cov[X
i +k
, X
j +l
]a
[k[[l [
1
2
LE[F
2
]
l
(
(i +k)( j +l 1)
+4
(i +k)( j +l )
+
(i +k)( j +l +1)
)a
[k[[l [
1
2
LE[F
2
]
l
_
a
[l i l [[l j [
+4a
[l i [[l j [
+a
[l i +l [[l j [
_
_
3LE[F
2
]a
[i j [
(1.136)
respectively. The exponential decay with [ i j [ shows that the correlation structure is Markovian. The
sequence of correlation coefcients a
[i j [
has the specic values 1,
_
3 2 0.268, 7 4
_
3 0.072,
15
_
326 0.019, 9756
_
3 0.005, ....
It follows from (1.8) that the intensity of the Poisson process, the properties of the load sequence,
and even the subdivision into intervals have no inuence on the correlation coefcients of the random
sequence {Y
i
} that determines the approximately statically equivalent load intensity p(s) to the given
Poisson load eld p(s) by simple linear interpolation. It is noted that changing from the dimensionless
abscissa s to the real geometrical abscissa implies that the dimensionless load intensity p(s) transforms
to p(s)/L. Thus the mean load intensity becomes E[F] and the variance of Y
i
/L becomes
_
3E[F
2
]/L.
Surprisingly, perhaps, the correlation coefcients remain invariant with respect to L.
The covariance function of p(s) follows from
E[p(s)p(t )[N 1] lim
h0
_
E
__
F
h
_
2
1
U[s,s+h][t ,t +h]
[N 1
__
E[F
2
]lim
h0
_
1
h
2
E
_
1
U[s,s+h][t ,t +h]
[N 1
_
_
E[F
2
]lim
h0
_
1
h
2
h
3
I
0
_
s t
h
__
1
3
E[F
2
](s t ) (1.137)
so that
Cov[p(s), p(t )[N] N(E[p(s)p(t )[N 1] E[p(s)[N 1]E[p(t )[N 1])
N
_
1
3
E[F
2
](s t )
1
9
E[F]
2
_
(1.138)
and
Cov[p(s), p(t )] E
_
N
_
1
3
E[F
2
](s t )
1
9
E[F]
2
__
+Var[NE[F]] LE[F
2
](s t ) (1.139)
The residual covariance function is the difference between (1.139) and the function obtained from the
linear regression by substituting the covariance Cov[X
i
, p(t )] for X
i
, that is, by replacing Y
i
by
k
Cov[X
i +k
, p(t )]a
[k[
_
3LE[F
2
]
k
I
i +k
(t )a
[k[
_
3LE[F
2
]
[t ]i +1
k[t ]i
I
0
(t i k)a
[k[
_
3LE[F
2
]
_
I
0
(t [t ])a
[[t ]i [
+I
0
(t [t ] 1)a
[[t ]i +1[
_
(1.140)
Linear interpolation with respect to s between the two values corresponding to i [s] and i [s]+1, then
gives that except for the factor LE[F
2
] the residual covariance function is
C(s, t ) (s t )
_
_
3(133+6+3
_
()1
[s]<[t ]
+(+2)1
[s][t ]
+()1
[s]>[t ]
__
a
[[s][t ][
(1.141)
Dimension Reduction and Discretization 29
where s [s] and t [t ] are the fractional parts of s and t , respectively.
Clearly the linear regression p(s) is not a good direct approximation to the Poisson load eld p(s).
However, the accuracy should only be judged after application of the linear functional that maps the
load eld into the relevant load effect. In fact, since
G
s
G
t
{(s t )} G{g(s)} (1.142)
where g(s) is the inuence function of the considered load effect, the delta function singularity becomes
eliminated. Let g(s) be a function that can be dened by linear interpolation between its values on the
integers. Obviously g(s) can be expressed as a linear combination of the functions I
i
(s) for which the
residual variance is zero. Thus the residual variance is zero also for g(s) showing that the static equiva-
lence is exact for any inuence function of this particular type. To get a sufciently general evaluation
of the order of size of the residual variance consider a piece-wise linear inuence function of the form
g(s l ) for some l [0, 1]. Then it is sufcient to consider the difference between g(s l ) and the piece-
wise linear function dened by the values of g(s l ) on the integers. This difference function is zero on
the integers. In the interval [i 1, i ] corresponding to i [s] it is proportional to the function
l
1
[0,l [
+
1
1l
1
[l ,1]
(1.143)
by a factor c
i
. Applying (1.7), the residual variance becomes
Var[G(s)
G(s)] LE[F
2
]R(l ; {c
i
}) (1.144)
where
R(l ; {c
i
})
_
C(s, t )
_
1
[0,l [
l
+1
[l ,1]
1
1l
__
1
[0,l [
l
+1
[l ,1]
1
1l
_
c
[s]
c
[t ]
ds dt
__
_
3+2(
_
31)l (1l )
_
/12
_
i
c
2
i
+
__
_
3+2
_
3 l (1l )
_
/6
_
i
c
i
j 1
c
i +j
a
j
(1.145)
For {c
i
} given, the residual variance is maximal for l 0.5 and minimal for l 0 or 1 with the two coef-
cient values in the last factor equal to 0.175, 0.433 and 0.144, 0.289, respectively. Thus the dominating
inuence on the residual variance comes from the sequence {c
i
}. By and large the best accuracy is ob-
tained by choosing the equidistant stochastic nite element division points as closely as possible to the
points of non-differentiability of the actual inuence function. Of course, this attempt tends to counter-
act the goal of having few discretization random variables.
1.9 Stochastic nite element methods and reliability calculations
The main features of nite element methods applied in structural engineering are assumed known to
the reader. When random elds are included in the structural modelling and nite element methods
are applied, the elds must be given a suitable representation on the nite element level. This leads to
the notion of stochastic nite elements. Essentially the stochastic part of the nite element modelling
consists of replacing the eld of innite dimensionality of randomness by a eld dened by a nite set of
randomvariables. Referring to the previous sections there are several possibilities of suchelddiscretiza-
tions giving different levels of approximation errors, of course. Seeking for better approximations lead
30 Structural Reliability
to increasing computational efforts even though it may not necessarily lead to an increasing conceptual
complexity of the discretization method.
Based on the presentation in the previous sections the following eld discretization methods can be
listed [12]. The rst 4 to 6 methods are listed by and large in the order of increasing output approximation
accuracy for the same dimensionality of randomness.
1. Midpoint method
The eld is replaced by a eld of random values that are constant within each element. These values are
taken as the eld values of the original eld at a central point of each element [20]. Thus the replacement
eld depends on the element mesh and is discontinuous over the element boundaries. The joint prob-
ability distribution of the nite set of random variables is directly given by the denition of the original
eld.
2. Integral average method
Same as 1 except that the random values are taken as the average eld value over each element [21]. The
joint probability distribution of the nite set of random variables is unknown except for Gaussian elds.
3. Shape function method
Within each element the eld is replaced by an interpolation between a nite set of eld values using
some suitable, but otherwise arbitrary shape functions (spline functions) as interpolation functions [22].
The replacement eld gets the same analytical properties as the chosen shape functions.
4. Direct linear regression method
This is an optimal version of 3 in the sense that the best shape functions (in the mean square sense)
are used thus removing the arbitrariness with respect to shape function choice. The eld is replaced by
the linear regression of the eld on a nite set of eld values [12]. The replacement eld has the same
analytical regularity properties as the mean and covariance function of the eld. The mesh of points at
whichthe eldvalues are takenneednot be relatedinany particular way to the nite element meshof the
mechanical model (as is also the case for the shape function method). The joint probability distribution
of the set of random variables is directly given by the denition of the eld. Except at the points of the
mesh, the replacement eld of a non-Gaussian eld is generally not mean value correct. For a Gaussian
eld the replacement eld is a mean value correct Gaussian eld.
Sometimes this procedure is called kriging (a terminology that according to its origin [3][6] (Sec-
tion 2.1) rather should be used solely for statistical-stochastic interpolation between measured values at
different spatial points. This is treated in the next section).
5. Method of marginally backtransformed linear regression on marginally transformed eld values
The eld is assumed to be a marginally transformed Gaussian eld (translation eld [23]), for example
the lognormal eld. The corresponding Gaussianeld is replaced by the linear regressionof the Gaussian
eld on a nite set of its eld values. The marginal transformation is next applied to the linear regression
to dene the replacement eld to the original eld [12]. The joint probability distribution of the set of
random variables is directly given by the denition of the eld. Except at the points of the mesh the
replacement eld is not mean value correct. However, it reproduces the marginal median at any point.
6. Method of mean value correct backtransformed linear regression on marginally transformed eld values
Same as 4 except that the linear regression of the Gaussian eld is interpreted as a conditional mean and
transformed back to the conditional mean of the original eld on the nite set of randomvariables of the
original eld. For a lognormal eld the relevant formulas are (1.82) to (1.87) and (1.93) to (1.100). More
Dimension Reduction and Discretization 31
generally this method is applicable for a Nataf eld [12] (Section 2.6).
7. Method of linear regression on linear functionals
The eld is replaced by the linear regression of the eld on a nite set of linear functionals dened on the
eld [18]. The linear functionals are chosen among linear functionals that are relevant for the solution
of the actual problem. Thus the method is an extension of the method known from the literature as the
weighted integral method [24, 25]. The joint probability distribution of the nite set of linear functional
is not known except for Gaussian elds. The replacement eld is more regular with respect to analytical
properties than the original eld. This property makes the method applicable on elds for which none
of the previously mentioned methods are applicable (Section 2.9).
8. Truncated series expansion methods
Starting from an exact expansion
X(t ) E[X(t )] +
n0
V
n
h
n
(t ) (mean square sense) (1.146)
of the eld with respect to a complete orthonormal set h
1
(t ), ..., h
n
(t ), ... of deterministic functions over
t with random variable coefcients
V
n
X(t )h
n
(t )dt , n 1, 2, ... (1.147)
the replacement eld is obtained by a suitable approximation to a suitable truncation of the expansion
[8, 9, 26]. In case the random coefcients are required to be uncorrelated, the unique Karhunen-Loeve
expansion [7, 27] is obtained as the exact expansion on which different approximation methods [8, 9]
are applied as explained in Section 2.1. For non-Gaussian elds it is a difcult problem to determine the
joint distribution of the randomcoefcients (1.147) of the expansion. For Gaussian elds the coefcients
become Gaussian and mutually independent.
For any other complete orthonormal function system than that used in the Karhunen-Loeve expan-
sion the random coefcients become correlated [26, 27]. However, by constructing a one-to-one linear
transformation of any nite subset of the random coefcients into an uncorrelated set of random vari-
ables it can be shown that the corresponding subsum of nitely many terms in the expansion can be a
good approximation to a corresponding subsum of the Karhunen-Loeve expansion containing the same
number of terms [26].
The nite expansion obtained by truncation of the Karhunen-Loeve expansion after the nth term is
identical to the linear regression of the eld on the n randomcoefcients of the nite expansion (see text
following (1.28)). This statement is generally not true for other expansions due to the correlationbetween
the truncated sum and the remainder. Thus the accuracy can be improved by replacing the truncation
sum by the linear regression of the eld on the random coefcients of the nite expansion. In fact, since
the randomcoefcients (1.147) are linear functionals onthe eld, the truncated series expansionmethod
is a special case of the previous method 7 of linear regression on linear functionals.
Judging the accuracy on the output level of the investigated mechanical problemthe linear function-
als of the Karhunen-Loeve expansion (for which the weight functions are the eigenfunctions related to
the covariance function of the eld) or any other orthogonal expansion may be inferior to linear func-
tionals that are of direct relevance to the mechanical problem.
Any of the listed random eld discretization methods may with varying accuracy be applied for the pur-
pose of rendering a structural reliability analysis practicable. The replacement eld to the original eld
32 Structural Reliability
X is in all the methods dened by a nite-dimensional random vector F{X} where F is a linear vector
functional dened on the eld. In all the methods the possibility of further reduction of the dimension of
randomness can be studied by applying a one-to-one inhomogeneous linear transformation of F{X} into
a set of uncorrelated and normalized random variables using the properties explained in the text after
(1.28)[12, 26, 28].
For reliability analysis applications the mechanical nite element program is typically formulated
such that it can compute approximate values of a critical vector functional dened on the set of all ran-
dom variables of the problem. The adverse event is that this functional gets an outcome outside a given
safe domain of functional values. This safe domain is specied on the basis of the given superior struc-
tural performance criteria. Thus the nite element program for the given safe domain denes a limit
state surface in the nite-dimensional space of the vector of all random variables of the problem.
For simplicity and also sufcient for the generalisation of the following explanation, let the random
vector F{X} contain all the randomness of the problem. To apply the generally available computer pro-
grams for computing approximations to the probability of the adverse event (e.g. programs that are
based on rst or second order reliability analysis methods (FORM or SORM) as well as on simulation
methods) all what is needed is to specify input information about the distribution properties of F{X}. If
X is a Gaussian eld then F{X} is a Gaussian vector and besides specifying this information it is there-
fore only required that the mean vector and the covariance matrix of F{X} be specied. These rst and
second order moments can be calculated by simple numerical integration of weighted single and double
integrals of the mean function and the covariance function of the randomeld X, respectively. However,
if X is non-Gaussian, then more than the second moment characterisations of F{X} is needed. Generally
it is then mandatory for obtaining calculation practicability to introduce suitable distribution approxi-
mations.
If the one-dimensional marginal distributions and the covariance matrix of F{X} are known, a pos-
sibility may be to use the Nataf distribution to approximate the distribution of F{X}. If it exists, this
distribution is dened as in Section 2.5 by an increasing marginal transformation of a Gaussian distribu-
tion of the same dimension as F{X}. The transformation is constructed such that the covariance matrix
and the one-dimensional distributions of F{X} are correctly reproduced by the transformation. However,
it may in some problems not be practicable to determine the marginal distributions of F{X}, except pos-
sibly as approximations obtained by statistical tting of standard distribution types to extensive samples
of simulated outcomes of F{X}. Such a simulation procedure can be difcult in itself because an accurate
generation of outcomes of F{X} requires an accurate simulation of nely discretized realisations of the
non-Gaussian eld X.
Since the assumption of having a Nataf distribution of F{X} in general is an approximation, it may
be justied to make the further approximation of solely concentrating on obtaining the skewness and
the kurtosis of the marginal distributions of F{X}. Knowing the rst four moments of each of the one-
dimensional marginal distributions, one may choose some standard type distributions that reproduce
these four moments, and then adopt the Nataf distribution with these marginal standard type distribu-
tions. A simpler possibility is, perhaps,to use the moment information to replace the components of the
random vector F{X} by third degree polynomials of correlated Gaussian variables (Winterstein approx-
imations [29]) such that they reproduce the rst four marginal moments and all the correlation coef-
cients correctly [30]-[32]. If no other methods are readily applicable for the given problem, the skewness
and the kurtosis may always be estimated statistically from a sample of simulated outcomes of F{X}.
Dimension Reduction and Discretization 33
1.10 Classical versus statistical-stochastic interpolation formulated
on the basis of the principle of maximumlikelihood
In modern reliability analysis in particular in geotechnical engineering or earthquake engineering it can
be necessary to make interpolation between measured values obtained at different spatial points and/or
at different points in time [33, 34]. Following a paper of the author [35] this section rst considers the
classical problem of interpolation and the difculty of error estimation in the classical theory except
under conditions that only rarely are satised in practice. The formulation of a conditional random eld
model for interpolation is next introduced as a pragmatic alternative. However, it is attempted to present
the statistical-stochastic interpolation method with a linking to classical interpolation because it may
ease the appreciation of the method as a pragmatic interpolation method whether or not the data are
generated by some physical process that behaves according to a random mechanism. Thus the method
of statistical-stochastic interpolation is simply viewed as a rational model of the uncertain engineering
guess on interpolated values. The basis is the idea that continuity and differentiability principles make
the variation among the measured values representative for what should be expected with respect to the
uncertainty of the interpolation values.
Finally it is shown that pragmatic principles of computational practicability of random eld interpo-
lation in large regularly organized tables lead to a very narrowclass of applicable correlation functions of
the interpolation elds.
The solution to the problem of interpolation in a table (x
0
, y
0
),
(x
1
, y
1
), ...,(x
n1
, y
n1
) of values of the n times differentiable function y f (x) is inclassical mathematical
analysis given by Lagrange on the form
f (x) y
0
Q
0
(x) +y
1
Q
1
(x) +... +y
n1
Q
n1
(x) +R
n
(x) (1.148)
in whichQ
i
(x), i 0, 1, ..., n1, is the uniquely dened polynomial of (n1)th degree that takes the value
1 for x x
i
and the value 0 for x x
0
, ..., x
i 1
, x
i +1
, ..., x
n1
. The Lagrangian remainder R
n
(x) is
R
n
(x) (x x
0
) ... (x x
n1
)
f
(n)
()
n!
(1.149)
in which is some number contained within the smallest interval I that contains x, x
0
, ..., x
n1
. Interpo-
lation to order n1 then consists of using (1.148) with the remainder neglected. The error committed by
the interpolation is bounded in absolute value by
[ R
n
(x) [
[ (x x
0
) ... (x x
n1
) [
n!
max
I
[ f
(n)
() [ (1.150)
Thus the error evaluation in classical interpolation is not offering a model of the error in terms of a ran-
dom variable but only an upper bound that can be highly conservative. Moreover, the evaluation of the
bound (1.150) requires that the nth derivative can be obtained. This, however, is in contrast to most sit-
uations in practice where interpolation is needed. Often only the table (x
0
, y
0
), (x
1
, y
1
), ..., (x
n1
, y
n1
) is
given and the values of the function f (x) are unknown between these points. This is the typical situation
when the table is obtained by point by point measurement of some physical quantity that varies with x
in an unknown way. The table may also be the result of a lengthy computation. In principle f (x) may
be computed for any needed value of x but it may be more economical to accept even a considerable
error in the evaluation of f (x) as obtained by interpolation between already computed values. The same
holds in the case of values obtained by measurements. In some situations it may even be impossible to
34 Structural Reliability
measure intermediate values (as in the obvious case of x being the time, but sometimes also in cases
where x is a spatial coordinate). With only the table of points given, the interpolation procedure is usu-
ally guided by a principle of simplicity that may be supported by physical and geometrical arguments. To
appreciate the philosophy of the principle of simplicity behind practical interpolation it is only needed
to note that there is an innite set of interpolation functions passing through the given points. Besides
satisfying differentiability requirements to some specied order this set is obviously characterized by
the property that the difference between any two functions of the set is a function with zero points at
x
0
, x
1
, ..., x
n
. In practice the choice of the interpolation function from the set is usually made in view of
choosing an interpolation function that in itself and in all the derivatives up to the specied order has as
small a variability as possible. Even though this principle of simplicity of the interpolation may be given
a precise mathematical denition and it thereafter may be demonstrated that it leads to a unique choice
of the interpolation function, it is still just an arbitrary principle that does not give any indication of the
interpolation error.
A solution to this error evaluation problem can be obtained by introducing an alternative but some-
what similar principle of simplicity. It is based on the principles of statistical reasoning.
Let J(y
0
, ..., y
n1
) be the set of interpolation functions and introduce a probability measure over the
union
F
_
z R
n
J(z) (1.151)
in which z (z
0
, ..., z
n1
). If it is solely required that the applied interpolation function is n times con-
tinuously differentiable, then F is the class of n times continuously differentiable functions. Consider a
probability measure over F and assume that it depends on a number of parameters
1
, ...,
q
. For each
value set of
1
, ...,
q
the probability measure denes a random eld over the range of values of x. Let the
probability measure have such regularity properties that there is a probability density at the set J (z) for
each z R
n
in the sense of being the unique limit
lim
d0
_
_
P
_
_
N (z)
J() [
1
, ...,
q
_
Vol[N (z)]
_
_
(1.152)
where N (z) is anarbitrary neighborhoodof z withvolume Vol[N (z)], dis the diameter of N (z) according
to some suitable diameter denition, and P[ [
1
, ...,
q
] is a suitably dened probability measure.
The principle of simplicity now concerns a principle about how to choose the values of the param-
eters
1
, ...,
q
that x the probability measure on F. Instead of the deterministic principle of least vari-
ability it is reasonable to choose
1
, ...,
q
so that the probability density has its maximum for z y
(y
0
, y
1
, ..., y
n1
), that is, at the actual set of interpolation functions. This is the well-known principle of
maximum likelihood estimation in the theory of mathematical statistics. When the parameter values
are chosen for example according to the principle of maximum likelihood, the probability measure on
F induces a probability measure in the relevant set of interpolation functions J(y) simply as the condi-
tional probability measure given J(y), that is, given z y. Thus a conditional random eld is dened that
possesses the desired properties of expressing the interpolated value at x of the unknown function as a
random variable. At the points of the given table (x
0
, y
0
), ..., (x
n1
, y
n1
) the random variable degenerate
to be atomic, but at a point x different fromthe points of the table it gets a mean and a standard deviation
Dimension Reduction and Discretization 35
that depend on x. The detailed nature of this dependency is laid down in the mathematical structure of
the probability measure introduced in F.
>Froman operational point of viewthe most attractive probability measure to choose is the Gaussian
measure. Let the Gaussian measure on F have mean value function (x), x R, and covariance function
c(, ), , R. Then the conditional measure on J (y) is Gaussian with mean value function given by the
linear regression (1.101), that is,
E[Y (x) [ z y] (x) +[c(x, x
0
)...c(x, x
n1
)]{c(x
i
, x
j
)}
1
_
_
_
y
0
(x
0
)
.
.
.
y
n1
(x
n1
)
_
_
_ (1.153)
and covariance function given by the residual covariance function corresponding to the linear regression
(1.2), that is,
Cov[Y (), Y () [ z y] c(, ) [c(, x
0
)...c(, x
n1
)]{c(x
i
, x
j
)}
1
_
_
_
c(, x
0
)
.
.
.
c(, x
n1
)
_
_
_ (1.154)
The conditional mean (1.153), in particular, is written out explicitly in order to display an interpretation
of the mean value function (x) and the function c(, ) that relates them to usual deterministic interpo-
lation practice. In fact, if (1.148) and (1.153) are compared, it is seen that (1.153) is obtained from (1.148)
if the polynomial Q
i
(x), i 0, ..., n 1, is replaced by the linear combination
a
0i
c(x, x
0
) +a
1i
c(x, x
1
) +... +a
(n1)i
c(x, x
n1
) (1.155)
where the coefcients a
0i
, ..., a
(n1)i
are the elements of the i th column in the inverse to the covariance
matrix {c(x
i
, x
j
)}. It is seenthat this functionlikeQ
i
(x) is 1 for x x
i
and 0 for x x
0
, ..., x
i 1
, x
i +1
, ..., x
n1
.
Indeed, if (1.155) is identied withQ
i
(x) for i 0, ..., n1, the functions c(x, x
0
), ..., c(x, x
n1
) are uniquely
determined by their values at x
0
, x
1
, ..., x
n1
as
c(x, x
i
) c(x
0
, x
i
)Q
0
(x) +... +c(x
n1
, x
i
)Q
n1
(x) (1.156)
As a function of x this is a valid covariance, that is, there exists a non-negative denite function c(, )
such that (1.156) is obtained for (, ) (x, x
i
). This is seen directly by computing the covariance function
of the random eld
Z
0
Q
0
(x) +... +Z
n1
Q
n1
(x) (1.157)
in which (Z
0
, ..., Z
n1
) is a random vector with covariance matrix
{c(x
i
, x
j
)}. The covariance function is
c(, ) [Q
0
()...Q
n1
()]{c(x
i
, x
j
)}
_
_
_
Q
0
()
.
.
.
Q
n1
()
_
_
_ (1.158)
which gives (1.156) for x and x
i
.
36 Structural Reliability
It follows from this that (1.148) except for R
n
(x) is a special case of (1.153). The remainder becomes
replaced by the term
(x) [c(x, x
0
)...c(x, x
n1
)]{c(x
i
, x
j
)}
1
_
_
_
(x
0
)
.
.
.
(x
n1
)
_
_
_ (1.159)
plus a Gaussian zero mean randomeld with covariance function given by (1.154). This interpretation of
the mean value function (x) and the covariance function c(, ) of the random eld as essentially being
interpolation functions makes it easier to appreciate the consequence of a specic mathematical form
of the covariance function [36]. For example, if the general appearance of the values in the table suggests
the choice of a homogeneous Gaussian eld, the choice of a correlation function like exp[ [ []
implies that the mean interpolation function given by (1.153) will be non-differentiable at x x
0
, ..., x
n1
while a correlation function like exp[( )
2
] will give differentiable interpolation function also at
x x
0
, ..., x
n1
. In fact, under Gaussianity the sample functions corresponding to the rst correlation
function will with probability 1 be continuous but not differentiable at any point while the second corre-
lation function corresponds to sample functions that are differentiable of any order.
As mentioned in Section 2.1 the procedure of doing statistical-stochastic interpolation is often called
kriging.
Example Consider the case where the points x
0
, ..., x
n1
are equidistant with x
i +1
x
i
h. Let the random
interpolation eld on the line be a homogeneous Gaussian eld with mean and covariance function
c(, )
_
_
_
_
1
[ [
h
_
2
for [ [h
0 otherwise
(1.160)
Then (1.153) gives
E[Y (x) [ z y]
1
h
[(x
1
x)y
0
+(x x
0
)y
1
] (1.161)
for x
0
x x
1
. This is equivalent to linear interpolation in the mean. The covariance function (1.154)
becomes
Cov[Y (), Y () [ z y]
_
_
_
_
h
_
2
[h
2
h [ [ (x
1
)(x
1
) (x
0
)(x
0
)] for [ [h
0 otherwise
(1.162)
from which the standard deviation
D[Y (x) [ z y]
h
_
2(x x
0
)(x
1
x) (1.163)
is obtained. It is interesting to compare this measure of the interpolation error with the Lagrangian re-
mainder obtained from (1.149) for n 2. It is seen that (1.163) varies like the square root of R
2
(x), that is,
it predicts larger errors close to x
0
or x
1
than R
2
(x) does.
Dimension Reduction and Discretization 37
While the interpolation functions in the classical procedure are broken at the points of the table im-
plying that no way is indicated of reasonable extrapolation outside the range from x
0
to x
n1
, the homo-
geneous random eld procedure represents a solution to both the interpolation and the extrapolation
problem in terms of a set of sample functions dened everywhere. The points of the table only play the
role that all the sample functions of the set pass through the points of the table. The homogeneity of
the eld implies that the variability of the points within the range from x
0
to x
n1
is reected in the eld
description outside this range. Specically we have for x x
0
:
E[Y (x) [ z y]
_
_
_
for x x
0
h
1
h
[(x
0
x)+(x x
0
+h)y
0
] for x
0
h <x x
0
(1.164)
and similarly for x >x
n1
. The standard deviation is
D[Y (x) [ z y]
_
_
_
for x x
0
h
h
_
(x
0
x)(x x
0
+2h) for x
0
h <x x
0
(1.165)
and similarly for x > x
n1
. Outside the interval from x
0
h to x
n1
+h the eld is simply given as the
homogeneous eld. The variationamong y
0
, ..., y
n1
determines the values of and
2
as the well-known
maximum likelihood estimates
y
1
n
n1
i 0
and s
2
1
n
n1
i 0
(y
i
y)
2
(1.166)
corresponding to a Gaussian sample of independent outcomes y
0
, ..., y
n1
.
Example The maximum likelihood principle leads to a specic choice of the distribution parameters
1
, ...,
q
, that is, it leaves no room for doubt about what values to choose. Such doubt can be included in
the stochastic interpolation procedure by assigning not just the distribution family to the interpolation
problembut also assigning a joint probability distribution to (
1
, ...,
q
). The mathematical technique
then becomes exactly the same as in the Bayesian statistical method.
For example, the parameter vector (, ) inthe previous example may be consideredas anoutcome of
the randomvector (M, ). Assuming a non-informative prior of (M, log) R
2
(degenerate uniformden-
sity over R
2
), the special random eld model of the previous example leads to the well-known Bayesian
standard results in Gaussian statistics. In the interpolation case the predictive distribution of
Y (x)
1
h
[(x
1
x)y
0
+(x x
0
)y
1
]
s
h
_
2(x x
0
)(x
1
x)
_
1
1
n
(1.167)
for x ]x
0
, x
1
[ is the t -distribution with n 1 degrees of freedom.
38 Structural Reliability
1.11 Computational practicability of the statistical-stochastic inter-
polation method
Both for the maximum likelihood principle and the Bayesian principle of stochastic interpolation on the
basis of a Gaussian eld assumption the governing mathematical function is the joint Gaussian density
f
Y
(y
0
, ..., y
n1
, , , P; )
1
n
_
det(P)
exp
_
1
2
2
(ye)
t
P
1
(ye)
_
(1.168)
written here for the case of a homogeneous eld with mean , standard deviation , and a correlation
function that denes the correlation matrix P of the random vector (Y (x
0
), ..., Y (x
n1
)). The elements
of the correlation matrix P contain the unknown parameters of the correlation function. As a function
of , and the correlation parameters the right side of (1.168) denes the likelihood function. Generally
neither P
1
nor the determinant det(P) canbe expressedexplicitly interms of the correlationparameters.
To maximize the likelihood with respect to the parameters by an iteration procedure both P
1
and det(P)
must therefore be evaluated several times.
The Bayesian principle of stochastic interpolation has particular relevance for structural reliability
evaluations of structures with carrying capacities that depend on the strength variation throughout a
material body. For example, a direct foundation on saturated clay may fail due to undrained failure ex-
tended over a part of the clay body. The evaluation of the failure probability corresponding to a specic
rupture gure requires a specically weighted integration of the undrained shear strength across the rup-
ture gure. If the undrained shear strength is measured only at a nite number of points in the clay body,
it is required to make interpolation and or extrapolation in order to obtain the value of the integrand in
any relevant point of the body. Irrespective of whether the maximum likelihood principle is applied or
whether the Bayesian principle is applied in order to properly take statistical uncertainty into account,
it is required that P
1
be computed iteratively for different values of the correlation parameters. For ex-
ample, for the Bayesian principle of choice this is the case when the reliability is evaluated by a rst or
second order reliability method (FORMor SORM) in a space of basic variables that among its dimensions
includes the correlation parameters. In the search for the most central limit state point by some gradient
method, say, the inverse P
1
has to be computed iteratively several times for different parameter values.
>From this discussion it follows that computational practicability put limits to the order of P or it
requires that the mathematical structure of P is such that P can be inverted analytically or such that P
1
can be obtained in terms of matrices of considerably lower order than the order of P. A possibility of
breaking down to lower order is present in case of what here is called a factorized correlation structure:
Let P and Q{q
i j
}
i , j 1,...,m
be correlation matrices. Then the matrix dened as
[Q] P
_
_
q
11
P q
12
P
q
21
P q
22
P
q
mm
P
_
_
(1.169)
is a correlation matrix. The proof is as follows: Let x
t
[x
t
1
...x
t
m
] be an arbitrary vector of dimension nm,
and let A be an orthogonal matrix such that A
t
PA ]
1
...
n
] where
1
, ...,
n
are the nonnegative
eigenvalues of P. Then
x
t
([Q] P)x
m
i 1
m
j 1
q
i j
x
t
i
Px
j
m
i 1
m
j 1
q
i j
y
t
i
y
j
1
m
i 1
m
j 1
q
i j
y
i 1
y
j 1
+... +
n
m
i 1
m
j 1
q
i j
y
i n
y
j n
(1.170)
Dimension Reduction and Discretization 39
in which y
i
Ax
i
, i 1, ..., m. Since Qis a correlation matrix, the right side of (1.170) is nonnegative. Thus
it follows that [Q] P is a correlation matrix.
It follows directly by the multiplication test that if P and Q are both regular, then
([Q] P)
1
[Q
1
] P
1
(1.171)
By application of simple row operations rst diagonalizing P to D in all places in (1.169) to obtain
_
_
q
11
D q
12
D
q
21
D q
22
D
_
_
(1.172)
and next diagonalizing (1.172) by exactly those row operations that diagonalize Q, it follows that
det([Q] P) [det(Q)]
n
[det(P)]
m
(1.173)
(m = order of Q, n = order of P).
Assume that the table of points corresponds to points in the plane arranged in a square mesh of
equidistant points in both directions with mesh width L. Let there be k points in the rst direction and
l points in the second direction in total giving kl points with given values of the otherwise unknown
function. The eld random variables Y
11
, Y
21
, ..., Y
k1
, Y
12
, Y
22
, ..., Y
k2
, ..., Y
1l
, Y
2l
, ..., Y
kl
corresponding to
the points (i , j ) of the mesh are collected in a vector of dimension kl and in the order as indicated. Then
it is easily shown that the correlation matrix of order kl for an arbitrary choice of L has the factorized
structure as in (1.169) if and only if the random eld is correlation homogeneous and the correlation
function of the eld can be written as the product of a correlation function solely of the coordinate along
the rst mesh direction and a correlation function solely of the coordinate along the second direction.
In the class of such product correlation functions the correlation functions that correspond to isotropic
elds are uniquely given as
exp[r
2
] (1.174)
where r is the distance between the two points at which the random variables are considered and is a
free positive parameter. Thus the assumption of isotropy of the interpolation eld and the requirement
of computational practicability for large kl make it almost a must to adopt the correlation function
dened by (1.174). Writing (1.174) for r L as the correlation coefcient , the correlation matrix of the
vector of Y -values becomes [S
1
] S
2
where
S
i
_
_
_
1
4
(1)
2
1
(2)
2
_
_
_ (1.175)
i 1( k), i 2( l ). These considerations generalize directly to 3 dimensions for a spatial equidis-
tant mesh of kl m points. Then the correlation matrix becomes [[S
1
] S
2
] S
3
with each of the matrices
S
1
, S
2
, S
3
of form as in (1.175) in case of spatial isotropy.
For a soil body it may be reasonable to have isotropy in any horizontal plane but not necessarily in the
3-dimensional space. Then S
3
may be any other correlation matrix obtained from the correlation func-
tion in the vertical direction. When soil strength measurements are made for example by the so-called
CPT method (Cone Penetration Test), the distance h between measurement points is much smaller in
40 Structural Reliability
the vertical direction than the mesh width L in the horizontal direction. Then S
3
can be of computation-
ally impracticable high order. However, there is at least one case of such a matrix S corresponding to a
homogeneous eld for which S
1
is known explicitly. This case is
S
_
_
1
2
m
1
m1
_
_
, S
1
1
1
2
_
_
1 0 0
1+
2
0
_
_
(1.176)
which corresponds to a homogeneous Markov eld on the line with exp[h] where is a free posi-
tive parameter.
This 3-dimensional homogeneous Gaussian eld interpolation model with (1.174) dening the hor-
izontal correlation properties and with Markov properties in the vertical direction has been used in a
reliability study of the anchor blocks for the suspension bridge across the eastern channel of Storeblt
in Denmark [37]. The size of the interpolation problem in that investigation was k 6, l 10, m 150
giving a table of 9000 points. Without the unique structuring of the random eld correlation given here,
the likelihood analysis would have been totally impracticable.
1.12 Field modelling on the basis of measured noisy data
In engineering practice measured values of elds are often obtained by use of less than perfect measur-
ing techniques either because no better technique is available or of economical reasons. Not rarely the
most simple probabilistic measuring error model is applicable for the purpose of including the inuence
of this error type in the interpolation problem. Referring to Section 2.11 the table of measured values
(x
0
, y
0
), ..., (x
n1
, y
n1
) should rather be (x
0
, y
0
+z
0
),...,(x
n1
, y
n1
+z
n1
) where z
0
, ..., z
n1
are measuring
errors. On the basis of an analysis of the measuring method it is often reasonable to assume that the error
values z
0
, ..., z
n1
independently of y
0
, ..., y
n1
can be considered as n mutually independent realizations
of a random variable Z of zero mean, or , more precisely, that the vector (z
0
, ..., z
n1
) can be consid-
ered as a realization of a random vector (Z
0
, ..., Z
n1
), where Z
0
, ..., Z
n1
are n mutually independent and
identically distributed random variables of zero mean and variance
2
. Clearly the deterministic inter-
pretation method is not suited as a tool for solving this interpolation problem. However, the eld method
is directly applicable by assuming that y
0
, ..., y
n1
are the values at x
0
, ..., x
n1
of the eld Y (x) with the
pragmatically chosen covariance function Cov[Y (), Y ()] c(, ). For simplicity assuming that both
the eld Y (x) and the error vector (Z
0
, ..., Z
n1
) are Gaussian and, as indicated above, that the eld and
the error vector are mutually independent, it follows that the maximum likelihood principle operates on
the Gaussian density (likelihood function) with the covariance matrix
C+
2
I (1.177)
where C{c(x
i
, x
j
)} and I is the unit matrix.
Unfortunately the necessary computational efforts may increase considerably hereby, in particular
for large tables. If the covariance matrix C can be inverted explicitly as exemplied in Section 2.12 it may
be convenient to apply the quotient series expansion
(C+
2
I)
1
C
1
[I (
2
C
1
)]
1
C
1
[I C
1
2
+C
2
4
C
3
6
+...]
(1.178)
Dimension Reduction and Discretization 41
cut off at some power of
2
dependent of the size of
2
as compared to the largest diagonal element of C.
It can be shown that the series (1.178) is convergent if
2
<1/ C
1
where the matrix norm is dened as
the maximal value of the row sums in the corresponding matrix of absolute values.
In case a non-zero value of
2
is obtained, the conditional mean (1.153) used as interpolation expres-
sion is replaced by the conditional mean of Y (x) given Y (x
i
) +Z
i
for i 0, ..., n 1:
E[Y (x) [ Y (x
i
) +Z
i
y
i
+z
i
, i 0, ..., n 1]
(x) +[c(x, x
0
)...c(x, x
n1
)](C+
2
I)
1
_
_
_
y
0
+z
0
(x
0
)
.
.
.
y
n1
+z
n1
(x
n1
)
_
_
_ (1.179)
with the corresponding residual covariance function given by (1.154) after replacement of {c(x
i
, x
j
)} by
C+
2
I. It follows by substituting the expansion (1.178) into (1.154) that
{Cov[Y (x
i
), Y (x
j
) [ Y (x
i
) +Z
i
y
i
+z
i
, i 0, ..., n 1]}
i , j 0,...,n1
2
I
4
C
1
+
6
C
2
... (1.180)
Thus there is not only a residual variance at the measuring points caused by the random measuring
error but also a correlation between the residuals at the different measuring points. The correlation
coefcients are of order of size as in the matrix
2
C
1
.
The conceptually simple measuring error model explained above has recently been succesfully used
for the interpretation of and interpolation between measured pressures at a series of points on the wall
of a circular concrete silo for grain storing [36]. However, this model is not applicable in all situations.
In particular, if the eld Y (x) has such properties that the random variables Y (x
0
), ..., Y (x
n1
) are only
weakly dependent or mutually independent, then the maximum likelihood principle will not be able to
separate the variability of the eld Y (x) from the variability induced by the measuring uncertainty. In
fact, the condition for the success of the simple model is that a considerable dependency is present be-
tween the eld values Y (x
0
), ..., Y (x
n1
). Also the method is restricted by the assumption of independent
measuring errors.
Some measuring situations are such that the only way to deal rationally with the measuring uncer-
tainty is by use of a pairing method. The simplest form of such a method is explained in the following
example [38] that solely concerns random variables. An adapted application on a eld measuring prob-
lem is treated after the example.
Example A sample is drawn from some unknown population (object population) and each element
of the sample is characterized by a measured value. The measurement procedure is assumed to be less
than perfect. On each measured value it introduces an error drawn from some unknown population M
1
.
Without knowing anything about population M
1
it is clearly not possible on the basis of the obtained
sample of values to infer anything about the properties of population . However, the situation is dif-
ferent if each element of the sample from also is characterized by a measured value obtained by use
of another independent measuring method with error population M
2
. It is shown in the following that if
both measuring methods besides being independent are such that the two mean errors for a given ob-
ject are independent of the error-free value that should be assigned to the object, then it is possible to
estimate the variances of each of the value populations corresponding to , M
1
, M
2
on the basis of the
sample of pairs of measured values. In order to obtain estimates of the mean values it is necessary to
assume that at least one of the measuring methods gives unbiased measurements in the sense that the
mean error is zero.
42 Structural Reliability
Let a random variable Z be dened on the object population and let it be measured by the two
independent measuring methods giving the values X
1
and X
2
, respectively. Then the measuring errors
are Y
1
and Y
2
and
Z X
1
+Y
1
X
2
+Y
2
(1.181)
Obviously Cov[Y
1
, Y
2
[ Z] 0, implying that Cov[X
1
, X
2
[ Z] = Cov[Z Y
1
, Z Y
2
[ Z] 0.
Under the assumption that the conditional means E[Y
1
[ Z] and
E[Y
2
[ Z] do not depend on Z, it then follows from the standard formula (total representation theorem
[39])
Cov[X
1
, X
2
] E[Cov[X
1
, X
2
[ Z]] +Cov[E[X
1
[ Z], E[X
2
[ Z]] E[0] +Cov[Z, Z]) (1.182)
that
Cov[X
1
, X
2
] Var[Z] (1.183)
Thus the variance of the true quantity Z can be estimated by estimating the covariance between the
results of the two measuring methods. Since
Cov[X
1
, Y
1
] E[Cov[X
1
, Y
1
[ Z]] E[Cov[X
1
, Z X
1
[ Z]]
E[Var[X
1
[ Z]] Var[X
1
] +Var[E[X
1
[ Z]]
Var[X
1
] +Var[E[Z Y
1
[ Z]] Var[X
1
] +Var[Z] (1.184)
it follows from Var[Z] Var[X
1
] +Var[Y
1
] +2Cov[X
1
, Y
1
] that
Var[Z] Var[X
1
] Var[Y
1
] (1.185)
Thus the variance of the measuring error Y
1
by use of (1.183) is obtained as
Var[Y
1
] Var[X
1
] Cov[X
1
, X
2
] (1.186)
By symmetry, Var[Y
2
] is obtained by interchanging X
1
and X
2
.
Under certain conditions the principles of the pairing method explained in the example can be adapted
to destructive testing measurements. Assume that some material property varies in space as a random
eld. By the process of measuring the property at a point the material is changed irreversibly or even
destructed within a certain neighbourhood of the point. Therefore the property cannot be measured by
some physical measuring device applied at the same point. However, if the rst measurement method
is applied for one set of points and the second measurement method is applied for another set of points
these two sets of measurements can in a certain sense be paired by use of a stochastic interpolation pro-
cedure based on the random eld model of the property variation. At each point of measurement by
the rst method a measured value is paired with a probability distribution derived by stochastic inter-
polation between the measured values obtained by the second method. By suitable assumptions about
the joint probabilistic structure of the measurement error elds and the true property eld it is then
possible to pull out the true eld from the measured eld. These assumptions are generalizations of
the simple independence type assumptions made in the elementary pairing method described in the
example.
Dimension Reduction and Discretization 43
In the following the objects are values of a realization of a eld of undrained shear strengths for a
saturated clay deposit [38]. The two measuring methods are the CPT-method (Cone Penetration Test)
and the vane test method, respectively, applied at two different sets of points of whichthe one, S
1
, is more
dense than the other, S
2
. The pairing is made by stochastic interpolation to the points of S
2
between the
measured values at the points of S
1
. Instead of being a number, at least one of the elements in the pair is a
probability distribution obtained by the interpolation. Also there will be stochastic dependence between
the different pairs.
Let
Z X+Y (1.187)
be a vector of logarithms of cone tip resistances obtained by ideally perfect CPT-measurements. The
vector X corresponds to the imperfectly measured CPT values while Y contains the measuring error cor-
rections. The CPT values refer to the points at which the vane tests are made. The CPT-values are there-
fore not obtained directly but are results of suitable interpolations between physically measured CPT-
values at other points. Thus the interpolation results are considered as imperfect measurements that
can be paired with the physical measurements obtained by the vane test. The logarithms of the vane test
measurements are contained in the vector X
v
and the corresponding measuring error corrections in the
vector Y
v
.
The logarithmic shear strength eld is assumed to be homogeneous. It is further necessary to make
some reasonable assumptions about the measuring error corrections Y and Y
v
. Striving at simplicity of
the analysis the following assumptions are made:
1. The conditional expectations E[Y [ Z] and E[Y
v
[ Z] are independent of Z.
2. The linear regression of Z
i
on X depends solely on X
i
with the same regression coefcient for all
i 1, ..., n, where Z
1
, ..., Z
n
and X
1
, ..., X
n
be the elements of Z and X, respectively.
3. The triple (Z, Y, Y
v
) is jointly Gaussian with no correlation between Y and Y
v
and with the elements
of Y
v
being uncorrelated with common standard deviation .
4. Z can be expressed as
Z X
v
+Y
v
+ce (1.188)
where c is some constant and e
t
[1...1].
The last assumption is based on the fact that elasto-plastic mechanics predicts that there is almost
proportionality between the undrained shear strength as measured by the vane test and the cone tip
resistance in the CPT-test when applied to an ideal saturated clay.
Since Cov[Z, Y
t
[ Z] 0 it follows by use of assumption 1 in the total representation theorem (1.182)
that
Cov[Z, Y
t
] Cov[E[Z [ Z], E[Y [ Z]
t
] 0 (1.189)
implying that
Cov[X, Y
t
] Cov[Y, Y
t
] (1.190)
44 Structural Reliability
Substituting this into
Cov[Z, Z
t
] Cov[X+Y, (X+Y)
t
] Cov[X, X
t
] +Cov[Y, X
t
] +Cov[X, Y
t
] +Cov[Y, Y
t
] (1.191)
gives
Cov[Z, Z
t
] Cov[X, X
t
] Cov[Y, Y
t
] (1.192)
By using assumption 2 in the general expression for the linear regression
E[Z [ X] E[Z] +Cov[Z, X
t
]Cov[X, X
t
]
1
(XE[X]) (1.193)
it follows that
Cov[Z, X
t
]Cov[X, X
t
]
1
aI (1.194)
for some constant a. Substituting Z X+Y and using (1.190) then give the equation
I Cov[Y, Y
t
]Cov[X, X
t
]
1
aI (1.195)
from which
Cov[Y, Y
t
] (1a)Cov[X, X
t
] (1.196)
Since the diagonals on both sides must be non-negative it follows that a 1 and from (1.192) that a 0.
Setting a (/)
2
, where
2
is the common variance of the elements in X, we see from(1.192) and (1.196)
that
Cov[Z, Z
t
]
2
P
X
,
2
2
(1.197)
where P
X
is the correlation matrix of X.
Assumption 3 applied to (1.188) shows that X
v
is Gaussian with mean and covariance matrix
E[X
v
] E[Z] E[Y
v
] c e (1.198)
Cov[X
v
, X
t
v
] Cov[Z, Z
t
] +Cov[Y
v
, Y
t
v
] (1.199)
Now let be a Gaussian vector which together with X, Y, X
v
, Y
v
is jointly Gaussian. This vector is a
vector of measurements that contains information about X given through the conditional means and co-
variances E[X[ ] and Cov[X, X
t
[ ]. Since the two measuring methods are independent, the information
contained in and obtained solely by the CPT-method carries no information about the outcome of the
error correction vector Y
v
related to the vane test. Therefore all covariances between elements of Y
v
and
elements of are zero. Fromthe joint Gaussianity and Cov[Z, Y
t
v
] 0, (1.189), it then follows by use of the
linear regression method that
Cov[Z, Y
t
v
[ ] 0 (1.200)
Moreover, it follows that
Cov[Y
v
, Y
t
v
[ ] Cov[Y
v
, Y
t
v
] (1.201)
Dimension Reduction and Discretization 45
Using the informationcontainedin, the meanvector E[Z] in(1.198) andthe covariance matrix Cov[Z, Z
t
]
in (1.199) should therefore simply by replaced by the corresponding conditional quantities E[Z [ ] and
Cov[Z, Z
t
[ ], respectively. To determine these conditional means and covariances we rst determine
E[Z [ X] and Cov[Z, Z
t
[ X] from the linear regression of Z on X. According to assumption 2 we have that
E[Z [ X]
2
X+(1
2
)e, / (1.202)
and the residual covariance matrix
Cov[Z, Z
t
[ X] Cov[Z, Z
t
] Cov[Z, X
t
]Cov[X, X
t
]
1
Cov[Z, X
t
]
Cov[Z, Z
t
]
2
Cov[Z, Z
t
]
2
(1
2
)P
X
(1.203)
where is the common mean of the elements of X (setting E[Y] 0).The total representation theorem
next gives the results
E[Z [ ]
2
E[X[ ] +(1
2
)e (1.204)
Cov[Z, Z
t
[ ]
2
(1
2
)Cov[X, X
t
] +
4
Cov[X, X
t
[ ] (1.205)
Thus (1.198) and (1.199) are replaced by
E[X
v
] E[Z [ ] c e (1.206)
Cov[X
v
, X
t
v
] Cov[Z, Z
t
[ ] +
2
I (1.207)
setting E[Y
v
] 0. (If E[Y] and E[Y
v
] are not zero, their contributions may be included in the constant c
in (1.188)).
All the unknown parameters are obtained as follows. First the eld that represents the measurements
X is modelled as a homogeneous Gaussian eld using a specic pragmatically chosen covariance func-
tion family. The parameters , , as well as the correlation parameters that determine the correlation
matrix P
X
are obtained as explained in Section 2.11 by the maximumlikelihood principle or the Bayesian
method, if necessary. The likelihood function for the remaining parameters c, , and can then be for-
mulated by use of (1.204) - (1.207) and the Gaussianity of X
v
.
Let x
v
be the observation of X
v
and write
(c, ) x
v
E[X
v
] (1.208)
R(, ) Cov[X
v
, X
t
v
]
1
(1.209)
Then the Gaussian density of X
v
computed at x
v
is
f
X
v
(x
v
)
_
det[R(, )]exp
_
1
2
(c, )
t
R(, )(c, )
_
, c R, R
+
, [0, 1] (1.210)
(means proportional to). The right side of (1.210) denes the likelihood function L(c, , ; x
v
) of c, ,
and . Let (C, , ) be the set of Bayesian random variables corresponding to (c, , ), and adopt the
non-informative prior for which (C, log, log(
2
+
2
2
)) has a diffuse prior over R{log, log(
2
+
2
2
) [
R
+
, 0 1}. Then the prior density of (C, , ) is proportional to /[(
2
+
2
2
)] and we get the
posterior density f
C,,
(c, , [ x
v
) by multiplying this prior with the likelihood function.
Before the likelihood function (1.210) can be used to infer about the parameters c, , and there is
a further step to be taken because the set of vane test undrained shear strength observations in practice
46 Structural Reliability
often will be imperfect in the sense that some of the test results are reported not by their values but by the
information that the values are larger than the measuring capacity of the applied vane (censored data).
This is expressed by saying that each of the randomvariables representing the vane test measurements is
clipped (or censored) at a given value x
0i
, i 1, ..., n. Thus the sample is given as x
1
x
01
, x
2
x
02
, ..., x
r
x
0r
, x
r +1
< x
0r +1
, ..., x
n
< x
0n
, where the sample has been ordered such that the rst r vane test shear
strengths are larger than the respective measuring capacities while the remaining n r tests are well-
behaved. For this clipped sampling case the likelihood function is obtained by integrating the joint
density of X
v
in (1.210) with respect to x
i
from x
0i
to for i 1, ..., r . Thus the likelihood function
becomes
L(c, ; x
v
)
_
det[R(, )]
_
x
01
_
x
0r
exp
_
1
2
(c, ; x)
t
R(, )(c, ; x)
_
dx
1
... dx
r
(1.211)
The numerical studies of the posterior density of (C, , ) obtained from (1.211) after multiplication by
the prior density must in practice be based on Monte Carlo integration except if r 1 or 2.
For given values of all the parameters the formulas (1.204) and (1.205) dene the interpolated true
eld Z(t) cleaned for measuring uncertainty as a Gaussian eld with conditional mean value function
E[Z(t) [ ]
2
E[X(t) [ ] +(1
2
) (1.212)
and conditional covariance function
Cov[Z(t
1
), Z(t
2
) [ ]
2
(1
2
)Cov[X(t
1
), X(t
2
)] +
4
Cov[X(t
1
), X(t
2
) [ ] (1.213)
For the purpose of making reliability analysis with respect to plastic collapse this interpolation technique
has actually been applied to obtain a random eld model for the undrained shear strengths of the clay
under the Anchor Block West of the Great Belt Bridge in Denmark conditioned on given CPT and vane
test results measured in situ [37]. The eld model for X(t) was chosen as mentioned at the end of the
previous section.
1.13 Discretization dened by linear regression on derivatives at a
single point
In certain problems, in particular when t is time so that X(t ) is a random process, it is useful to make a
discretization in terms of X(t ) and its rst n derivatives dX(t )/dt , ..., d
n
X(t )/dt
n
at a given point t t
0
. It
is sufcient to let t
0
0. More generally we will consider the linear regression of a randomvector process
X(t ) (X
1
(t ), ..., X
m
(t )) on X
1
(0), X
(1)
1
(0), ..., X
(n)
1
(0) where X
( j )
1
(0) d
j
X
1
(0)/dt
j
. Of continuity reasons
we have
E[X(t )[X
1
(0), ..., X
(n)
1
(0)] lim
h0
E[X(t )[X
1
(0), X
1
(h), ..., X
1
(nh)] (1.214)
because there is a one-to-one linear mapping between the vector of difference quotients Q up to order
n corresponding to the time step h and the vector Z (X
1
(0), X
1
(h), ..., X
1
(nh)), that is, there is a regular
difference quotient operator matrix so that QZ [DX
1
(s)]
s0
as h 0, D(1,
s
, ...,
n
s
n
). It follows
from (1.101) that
E[X
k
(t )[Z] E[X
k
(t )] +Cov[X
k
(t ), Z
t
]Cov[Z, Z
t
]
1
(ZE[Z])
E[X
k
(t )] +Cov[X
k
(t ), Z
t
]
t
(Cov[Z, Z
t
]
t
)
1
(ZE[Z]) (1.215)
Dimension Reduction and Discretization 47
so that as h 0:
E[X
k
(t )[X
1
(0), ..., X
(n)
1
(0)]
E[X
k
(t )] +
__
i
s
i
Cov[X
k
(t ), X
1
(s)]
_
s0
_
i 0,...,n
__
i +j
u
i
v
j
Cov[X
1
(u), X
1
(v)]
_
uv0
_
1
i , j 0,...,n
_
X
(i )
1
(0) E[X
(i )
1
(0)]
_
i 0,...,n
(1.216)
It is seen that the linear regression of X(t ) on X
1
(0), ..., X
(n)
1
(0) is determined by the mixed partial deriva-
tives of the covariance function of X
1
(t ) at (s, t ) (0, 0) and the partial derivatives of Cov[X(t ), X
1
(s)] at
s 0.
The vector process X(t ) is identical to the process
E[X(t ) [ X
1
(0), ..., X
(n)
1
(0)] +R(t ) (1.217)
where the linear regression term for X
1
(t ) dominates in the vicinity of t 0 while the residual vector
process R(t ) approaches X(t ) E[X(t )] as the distance from t 0 increases, given that the covariance
functions of X(t ) all approach zero as [ t [.
It follows from(1.217) that R
1
(0) and the rst n derivatives R
(1)
1
(0), ..., R
(n)
1
(0) of the rst component of
the residual vector process R(t ) are all zero. Therefore the linear regression of X
k
(t ) on X
1
(0), ..., X
(n)
1
(0)
gives a good approximation for k 1. Whether approximations that are sufciently good for the con-
sidered applications are obtained also for k / 1 depends on the cross-correlations. Clearly, if the cross-
correlations are small or zero the information contained in given values of X
1
(0), ..., X
(n)
1
(0) has small or
no predictive effect on X
k
(t ) for k /1.
The case where X(t ) is a stationary vector process has important applications treated in later sections.
For a stationary X(t ) the covariance function matrix depends solely on the time difference s t :
Cov[X(t ), X(s)
t
] {c
kl
(s t )}
k,l 1,...,m
(1.218)
The linear regression (1.13) consequently specializes to
E[X
k
(t )[X
1
(0), ..., X
(n)
1
(0)]
_
(1)
i
c
(i )
1k
(t )
_
i 0,...,n
_
(1)
j
c
(i +j )
11
(0)
_
1
i , j 0,...,n
_
X
(i )
1
(0)
_
i 0,...,n
(1.219)
in which without loss of generality X(t ) is assumed to have the zero vector as expectation. Since c
k1
(t )
c
1k
(t ) we have c
(i )
1k
(t ) (1)
i
c
(i )
k1
(t ). This has been used to obtain the rst row matrix in (1.219). More-
over, since c
11
(t ) c
11
(t ) we have c
(i +j )
11
(0) 0 for i + j odd.
For n 0, 1, 2 it is seen that (1.219) reads (using the standard dot notation for the derivatives of X
1
(t )):
E[X
k
(t )[X
1
(0)] c
1k
(t )
1
0
X
1
(0) (1.220)
E[X
k
(t )[X
1
(0),
X
1
(0)] c
1k
(t )
1
0
X
1
(0) c
t
1k
(t )
1
2
X
1
(0) (1.221)
E[X
k
(t )[X
1
(0),
X
1
(0),
X
1
(0)] [c
1k
(t ) c
t
1k
(t ) c
tt
1k
(t )]
_
_
0
0
2
0
2
0
2
0
4
_
_
1
_
_
X
1
(0)
X
1
(0)
X
1
(0)
_
_
(
0
2
2
)
1
_
c
1k
(t )[
4
X
1
(0) +
2
X
1
(0)] +c
tt
1k
(t )[
2
X
1
(0) +
0
X
1
(0)]
_
1
2
c
t
1k
(t )
X
1
(0) (1.222)
48 Structural Reliability
where
0
c
11
(0),
2
c
tt
11
(0),
4
c
(4)
11
(0) are the spectral moments
n
dG() (1.223)
for n 0, 2, 4, corresponding to the spectral representation
c
11
(t )
_
0
cost dG() (1.224)
of the covariance function of the process X
1
(t ). It is implicitly assumed above that the considered deriva-
tives exist. The spectral moment
2n
is the variance of the nth derivative process X
(n)
(t ) (which follows in
the same way as (1.13) follows from(1.13), noting that Cov[Z, Z
t
]
t
Cov[Z, (Z)
t
] Cov[DX
1
(s), D
t
X
1
(t )]
(s,t )(0,0)
_
Cov
_
d
i
X
1
(s)
ds
i
,
d
j
X
1
(t )
dt
j
__
(s,t )(0,0)
as h 0).
Even though
4
implies that the second derivative process
X
1
(t ) does not exist in an elementary
sense (may exist, though, e.g. in the sense of white noise), it is seen that
E[X
k
(t )[X
1
(0),
X
1
(0),
X
1
(0)]
E[X
k
(t )[X
1
(0),
X
1
(0)] (1.225)
as
4
(
0
,
2
bounded). Similarly
E[X
k
(t )[X
1
(0),
X
1
(0)]
E[X
k
(t )[X
1
(0)] (1.226)
as
2
(
0
bounded).
The (k, l )-element of the residual covariance functionmatrix is obtainedas the covariance Cov[X
k
(t ), X
l
(s)]
minus the covariance between the linear regressions of X
k
(t ) and X
l
(s) on X
1
(0), ..., X
(n)
1
(0) that in turn is
obtained by replacing {X
(i )
1
(0)} in (1.219) by the column vector {(1)
j
c
( j )
1l
(s)}
j 0,...,n
.
For n 0, 1, 2 we have the residual covariance expressions:
n 0 : c
kl
(s t ) c
1k
(t )c
1l
(s)
1
0
(1.227)
n 1 : c
kl
(s t ) c
1k
(t )c
1l
(s)
1
0
c
t
1k
(t )c
t
1l
(s)
1
2
(1.228)
n 2 : c
kl
(s t ) (
0
2
2
)
1
{
2
[c
1k
(t )c
tt
1l
(s) +c
tt
1k
(t )c
1l
(s)]
+
4
c
1k
(t )c
1l
(s) +
0
c
tt
1k
(t )c
tt
1l
(s)}
1
2
c
t
1k
(t )c
t
1l
(s) (1.229)
It is seen that the residual covariance for n 1 is the limit of the residual covariance for n 2 as
4
(
0
,
2
bounded), and similarly for n 0 and n 1 as
2
(
0
bounded).
1.14 Conditioning on crossing events
Let X(t ) be an m-dimensional Gaussian vector process and let Y(t ) be an s-dimensional (s m) subvec-
tor of X(t ). Then the conditional vector process X(t ) given Y(0) is Gaussian with the linear regression
E[X(t ) [ Y(0)] as vectorial mean value function and the corresponding residual covariance function as co-
variance function. Of course, by unconditioning with respect to the Gaussian distribution of Y(0) the set
of nite dimensional distributions of the Gaussian vector process X(t ) is regained according to the total
probability rule:
f
X(t
1
),...,X(t
q
)
(x
1
, ..., x
q
)
_
R
s
f
X(t
1
),...,X(t
q
)
(x
1
, ..., x
q
[ Y(0) y) f
Y(0)
(y)dy (1.230)
Dimension Reduction and Discretization 49
for any q > 0 and t
1
, ..., t
q
R. However, other vector processes than X(t ) can be dened on the basis
of (1.230) by assigning some other distribution to Y(0) than the original Gaussian distribution. Clearly
this type of modelling can be considered for any Gaussian eld with conditioning on any set of random
vraiables, but as it will be shown in the following such modelling has particular relevance for Gaussian
vector processes.
Equivalently to using (1.230) as the basis for dening a vector process V(t ) different fromX(t ) we may
dene V(t ) directly as
V(t )
E[X(t ) [ Y(0)] +R(t ) (1.231)
where R(t ) is the Gaussian residual vector process. Thus V(t ) becomes modelled as R(t ) added under the
assumption of independence to the given inhomogeneous linear function
E[X(t ) [ Y(0)] of the random
vector Y(0) that may have any applicationally relevant probability distribution assigned to it.
Several interesting problems can be analysed by use of (1.231) in connection with phenomena that
depend on the event that the trajectory of X(t ) crosses out through the hyperplane orthogonal to the x
1
-
axis in the distance u from the origin. With sufcient generality consider crossings that happen at time
t 0, and assume that the process X
1
(t ) possesses differentiable sample functions. Then the crossing
event C can be dened as C {X
1
(0) u,
X
1
(0) >0}. Obviously C has probability zero so that condition-
ing onC requires special care in order to ensure uniqueness of the obtained conditional probabilities. In
particular it is necessary to have an applicationally relevant denition of the conditional distributions of
the vector process X(t ) given the event C.
The uniqueness problem can best be illustrated by a study of two alternative (among several) deni-
tions of the conditional probability density of
X
1
(0) givenC. For shortage of notation omit the index and
write X for X
1
. Instead of considering the sample curve upcrossings of level u with slope z in the time
interval [0, dt ] it is sufcient to consider the upcrossings with slope z of the tangents to the trajectories at
t 0 as dt 0 [2]. It is seen from Fig. 4 (top) that these tangents are those that cross through the x-axis
within the interval [uzdt , u]. Thus the probability (asymptotically as dt 0) of having a sample curve
of any positive slope at t 0 crossing through level u within the time interval [0, dt ] is equal to the prob-
ability content of the angular domain shown to the right in Fig. 4 (top) calculated by integration of the
joint density of X X(0) and Z
X(0) over the domain. Since the area element is z dz dt this probability
becomes
h
(0)dt
__
0
f
X,Z
(u, z)z dz
_
dt (1.232)
and the conditional density of Z given the crossing event C C
h
obviously becomes
f
Z
(z [ C
h
)
1
h
(0)
z f
X,Z
(u, z) (1.233)
Alternatively to counting the number of crossings of level u in the time interval [0, dt ] we may count
the number of crossings with slope z through the interval [udx, u] on the x-axis. Surely, as dx 0 these
sample curves cross level u in the time interval [0, dx/z] that approaches [0, 0]. However, the probability
(asymptotically as dx 0) of having a sample curve of any positive slope at t 0 crossing through the
x-axis within the interval [u dx, u] becomes, Fig. 4 (bottom),
v
(0)dx
__
0
f
X,Z
(u, z)dz
_
dx (1.234)
50 Structural Reliability
and the conditional density of Z given the crossing even C C
v
becomes
f
Z
(z [ C
v
)
1
v
(0)
f
X,Z
(u, z) (1.235)
Thus different results are obtained in dependence of howthe crossing event C of zero probability is inter-
preted as the limit of non-zero probability events. The indices h and v onC refer to "horizontal window"
and vertical window, respectively. For applications that refer to the number of crossings per time unit
the following considerations show that it is the horizontal window crossings that are of interest.
Figure 4. Denition of upcrossings of level u through horizontal window (top) and vertical window (bot-
tom).
Eventhough the event of having anupcrossing at a specied time point has probability zero, upcross-
ings of level u occur with non-zero probability at some time points within any time interval of non-zero
length. We may count these upcrossings of level u in the time interval [0, T] by dividing the interval in n
disjoint intervals of length T/n and assign the indicator random variable
1
i
_
_
_
1 if upcrossing in the interval
_
i 1
n
T,
i
n
T
_
0 otherwise
(1.236)
Dimension Reduction and Discretization 51
Then
_
n
i 1
1
i
_
n{1,2,...}
N(T) (1.237)
is an increasing sequence of random variables with limit equal to the random number of upcrossings
N(T) in the interval [0, T]. Since according to (1.232) (shifting 0 to t ) we obviously have
E[
n
i 1
1
i
]
n
i 1
E[1
i
]
_
T
0
h
(t )dt (1.238)
as n , it follows that the mean number of upcrossings of level u is
E[N(T)]
_
T
0
__
0
f
X(t ),
X(t )
(u, z)z dz
_
dt (1.239)
The integrand in (1.239)
+
(t , u)
_
0
f
X(t ),
X(t )
(u, z)z dz (1.240)
can thus be interpreted as the mean rate of upcrossings of level u at time t . Formula (1.240) is the cele-
brated Rice formula [40] derived here by simple heuristic arguments.
Under the assumption that X(t ) is Gaussian, the joint distribution of X(t ) and
X(t ) is Gaussian and
both of zero mean if the process X(t ) has zero mean. Let
0
,
1
,
2
denote, see (1.13),
0
Var[X(t )] (1.241)
1
Cov[X(t ),
X(t )]
v
Cov[X(t ), X(v)]
vt
(1.242)
2
Var[
X(t )]
2
uv
Cov[X(u), X(v)]
uvt
(1.243)
Then
E[
X(t ) [ X(t )]
1
0
X(t ) (1.244)
Var[
X(t ) [ X(t )]
2
_
1
2
1
2
_
(1.245)
calculated as the linear regression of
X(0) on X(0) and the corresponding residual variance, respectively.
Thus the joint density of X X(t ) and Z
X(t ) becomes
f
X,Z
(x, z)
1
_
2
1
_
x
_
0
_
_
_
_
z x
1
/
0
_
2
1
/
0
_
_
_ (1.246)
so that the mean upcrossing rate of level u at time t according to (1.240) becomes
+
(t , u)
1
0
_
2
1
_
u
_
0
_
_
_
_
1
_
2
1
u
_
0
_
_
_ (1.247)
52 Structural Reliability
in which () is the function
(x) (x) +x(x) (1.248)
When X(t ) is stationary we have
1
0 and (1.247) reduces to
+
(t , u)
_
2
2
0
_
u
_
0
_
(1.249)
independent of t .
The density (1.233) follows from (1.246) and (1.247) as
f
Z
(z [ C
h
)
0
2
1
z
_
_
_
z u
1
/
0
_
2
1
/
0
_
_
_
_
_
_
1
_
2
1
u
_
0
_
_
_
, z >0 (1.250)
For
1
0 this is the so-called Rayleigh density
f
Z
(z [ C
h
)
z
2
exp
_
1
2
_
z
_
2
_
2
_
, z >0 (1.251)
The formulas (1.232)(1.240) are valid also for non-Gaussian processes with such smoothly varying sam-
ple curves that exclude the occurrence of everywhere dense crossing points in any time interval and
also exclude events of having sample function tangents in common with the level u as being events of
probability zero [2]. Under these assumptions it follows from the step from (1.238) to (1.239) that the
asymptotic probability
h
(t )dt of having an upcrossing of level u in the time interval [t , t +dt ] equals
the mean number of upcrossings
+
(t , u)dt in [t , t +dt ] as dt 0.
If not all upcrossings in [0, T] are counted but only those for which the slopes of the sample curve at
the crossing points are in the interval [z, z +dz], the right side of (1.238) becomes replaced by
_
T
0
[ f
X(t ),
X(t )
(u, z)z dz]dt (1.252)
and is thus the mean number of crossings of this kind. The ratio of (1.252) and E[N(T)] given by (1.239)
is seen to approach f
Z
(z [ C
h
)dz as T 0. Thus the conditional probability that Z
X(0) [z, z +dz]
given that there is a horizontal windowupcrossing of level u at time t 0 is identical to the ratio between
the mean rate at t 0 of upcrossings under slope in the interval [z, z +dz] and the mean rate at t 0 of
all upcrossings (asymptotically as dz 0).
For stationary and ergodic processes it is possible to give a useful interpretation of the conditional
probability of any event given the event C
h
of a horizontal window upcrossing of level u. In fact, for X(t )
stationary the ratio of (1.252) and (1.239) becomes f
Z
(z [ C
h
)dz independent of T. Under the assumption
of ergodicity (that is, ensemble averaging can be replaced by time averaging) the ratio of the number of
crossings with given properties (like the sample function at the upcrossing having slope in the interval
[z, z +dz]) to the total number of crossings within [0, T] is an estimator of the conditional probability
Dimension Reduction and Discretization 53
of having the property given C
h
. By use of the law of large numbers it can be shown that this estimator
converges with probability 1 to the conditional probability as T [41].
Returning now to (1.231) an example of an application is to let X
2
(t ) be the derivative process
X
1
(t )
of the Gaussian process X
1
(t ) and dene the vector process
V(t ) E[X(t ) [ X
1
(0) u,
X
1
(0) Z] +R(t ) (1.253)
where Z is a randomvariable with the density (1.250), and the linear regression is given by (1.13) for n 1
or, for X(t ) stationary, by (1.221). This vector process V(t ) gives detailed information about the properties
of the sample trajectories of X(t ) in the vicinity of an upcrossing (hereafter omitting reference to horizon-
tal window) of level u at t 0. This is particularly useful when X(t ) is stationary and ergodic because then
the description is valid without prespecifying the time point of the upcrossing. Moreover, the description
can be empirically veried by sampling from the same trajectory of X(t ) at each upcrossing point.
The topics explained on a heuristic level in this section were rst studied by Kac and Slepian [42,
43]. Lindgren has made extensive use of Kacs and Slepians results in studies of all sorts of both purely
mathematical problems and applications related to crossings of levels and to local extremes in Gaussian
processes. Lindgren intoduced the name Slepian model (vector) process for a process dened like
V(t ) in (1.253) [44]. In this and the following sections only the case of conditioning on level crossings
of a scalar process is considered. However, the Slepian model process concept may be generalized to
conditioning on outcrossings of a vector process through the boundary of some suitably regular domain
[45] and even to make sense for random elds [46, 47].
1.15 Slepian model vector processes
Let X(t ) be a stationary Gaussian vector process of zero mean vector, and let Y(t ) be a subvector of X(t ).
Moreover, let two of the elements in X(t ) be a process X(t ) and its derivative process
X(t ), and let none
of these two processes be elements of Y(t ). Slightly more general than in (1.253) we may then dene the
Slepian model vector process
V(t ) E[X(t ) [ X(0) u,
X(0) Z, Y(0) Y] +R(t ) a(t )u +b(t )Z +C(t )Y+R(t ) (1.254)
associated to upcrossings of level u by the scalar process X(t ). The random variable Z represents the
slope of the sample curve of X(t ) at an arbitrary upcrossing of level u, and the probability density of Z
(interpretedinthe sense of long runsampling as explainedinthe previous section) is the Rayleighdensity
(1.251).
By marking the upcrossings not only by the observed value of Z but also by the value of Y at the
upcrossings, it is seen exactly as in the previous section that the long run probability density of (Z, Y) is
given by
f
Z,Y
(z, y [ C
h
) f
Z
(z [ C
h
) f
Y
(y [ X(0) u,
X(0) z, C
h
) (1.255)
in which the rst factor is the Rayleigh density (1.251) and the second factor is independent of the cross-
ing event and is the normal density of mean
E[Y [ X(0) u,
X(0) z]
Cov[Y, X(0)]
Var[X(0)]
u +
Cov[Y,
X(0)]
Var[
X(0)]
z (1.256)
54 Structural Reliability
and covariance matrix
Cov[Y, Y
t
[ X(0),
X(0)]
Cov[Y, Y
t
] Cov[Y, X(0)]Cov[X(0), Y
t
]/Var[X(0)] Cov[Y,
X(0)]Cov[
X(0), Y
t
]/Var[
X(0)] (1.257)
using that Cov[X(0),
X(0)] 0 because X(t ) is stationary.
The process R(t ) is non-stationary Gaussian and independent of
(Z, Y), and it has the same nite dimensional distributions as the residual process corresponding to the
linear regression of X(t ) on X(0),
X(0), Y(0).
The coefcients a(t ), b(t ), C(t ) are submatrices of the regression coefcient matrix
B(t ) [a(t ) b(t ) C(t )]
Cov[X(t ), [X(0)
X(0) Y(0)]
_
_
Var[X(0)] 0 Cov[X(0), Y(0)
t
]
0 Var[
X(0)] Cov[
X(0), Y(0)
t
]
Cov[Y(0), X(0)] Cov[Y(0),
X(0)] Cov[Y(0), Y(0)
t
]
_
_
1
(1.258)
and the covariance function matrix of R(t ) is
Cov[R(s), R(t )
t
] Cov[X(s), X(t )
t
] B(s)Cov[
_
_
X(0)
X(0)
Y(0)
_
_
, X(t )
t
] (1.259)
Example The local minimum values of a sample function of a scalar process Y (t ) are the values of Y (t )
at the upcrossings of the level u 0 by the derivative process X(t )
Y (t ). Assume that Y (t ) is Gaussian,
E[Y (t )] 0 and that Y (t ) has the four times differentiable covariance function Cov[Y (u), Y (v)] r (vu).
Then the value at t 0 of the Slepian model process for Y (t ) corresponding to level u 0 becomes
Y
0
(0) a(0)0+b(0)Z +R(0). With
0
Var[Y (t )] r (0),
2
Var[
Y (t )] r
tt
(0),
4
Var[
Y (t )] r
(4)
(0)
we nd according to (1.15) that
b(0)
1
4
Cov[Y (0),
Y (0)]
4
(1.260)
and
Var[R(0)]
0
2
2
4
(1.261)
Thus the local minimum value of the normalized process Y (t )/
_
0
can be written as
Y
0
(0)
_
2
_
4
W +
_
1
2
2
4
U (1.262)
where W is a standard Rayleigh variable, i.e. f
W
(x) x exp[
1
2
x
2
], x > 0, and U is standard Gaussian
variable, i.e. f
U
(x) (x), and where W and U are mutually independent. By changing to +, the
analogous expression for the local maximum values is obtained. The well-known formula of Rice [40]
for the long run density of the local maximum values follows by a convolution calculation to obtain the
density of W +
_
1
2
U,
2
/
_
4
. This probabilistic proof was proposed by J. de Mar [48].
Dimension Reduction and Discretization 55
The factor
2
_
4
(1.263)
is called the regularity factor of Y (t ), and
_
1
2
is called the spectral width parameter of Y (t ). For
1 the process Y (t ) is called a narrowband process, and the local maximal values of Y (t )/
_
0
have
asymptotically standard Rayleigh distribution. For 0 the process is called a wide band process,
and the local maximal values of Y (t )/
_
0
have asymptotically standard normal distribution, that is, the
same distribution as Y (t ). It is seen that if
2
has a nite limit as
4
, then 0. As we shall see
later this gives rise to a paradox in the theory of random vibration.
Example In the previous example consider the linear regression of Y (t ) on Y (0),
Y (0), and
Y (0) followed
by conditioning on an upcrossing of level u 0 at t 0 by the derivative process
Y (t ). Then the proba-
bilistic behavior of the sample functions in the vicinities of the local minima is described by the Slepian
model
Y (0) a(t )0+b(t )Z +c(t )Y +R(t ) (1.264)
where the coefcient functions are obtained from (1.255) as
[a(t ) b(t ) c(t )] [r
t
(t ) r
tt
(t ) r (t )]
_
_
2
0 0
0
4
2
0
2
0
_
_
1
(1.265)
giving
b(t )
1
2
2
[
2
r (t ) +
0
r
tt
(t )] (1.266)
c(t )
1
2
2
[
4
r (t ) +
2
r
tt
(t )] (1.267)
These functions also follow from (1.13) after suitable interpretation of the symbols.
Let T be the time to the rst maximum of b(t )Z +c(t )Y after t 0 and let
H b(T)Z +[c(T) 1]Y (1.268)
Neglecting the contribution from the residual process R(t ), the random variable T is thus the time dis-
tance between an arbitrary local minimum and the following local maximum, and the random variable
H is the increment from the minimum value to the maximum value. It can be shown that if there is no
positive t for which r
t
(t ) r
ttt
(t ) 0, then there is a one-to-one mapping between (Z, Y ) and (T, H) that
allows (Z, Y ) to be explicitely expressed by (T, H) in terms of the functions b(t ) and c(t ) [49]. This makes
it possible to calculate the probability density of (T, H) from the density of (Z, Y ) as given by (1.255). The
result seems to be the only known empirically veried closed form approximation to the joint density
of wave length and amplitude that uses the entire covariance function r (t ) of the Gaussian process Y (t )
[49, 50].
Example If Y is put to a given value y in (1.264) the probability density of Z becomes conditional on
56 Structural Reliability
Y y. Thus we have from (1.255) that
f
Z
(z [ Y y,C
h
) f
Z,Y
(z, y [ C
h
)
z
_
z
_
4
_
_
_
_
y +z
2
/
4
_
2
2
/
4
_
_
_ z
_
_
_
z +y
2
/
0
_
2
2
/
0
_
_
_, z >0
(1.269)
The obtained Slepian model
Y
0
(t ) b(t )Z +c(t )y +R(t ) (1.270)
is useful for simulating a sequence of consecutive local extremes of Y (t ). Starting by simulating a local
minimum y from (1.262) an outcome z of Z is generated from the population dened by (1.269). The
time to the rst maximum of b(t )y +c(t )z is calculated and an outcome r of the Gaussian residual R(t )
for t is generated. Then b()y +c()z +r may be taken as an approximation to the next maximum
after the minimum y. Due to the symmetry of the Gaussian process Y (t ) the same procedure applies
after obvious modication to simulate the next minimum after the obtained maximum etc. An explicit
expression for the density of the random time T from the minimum of given value y to the next maxi-
mumcan be obtained [48]. Thus the outcome T may be directly generated. The described simulation
procedure is of interest in fatigue life studies assuming that the essential effect of randomprocess stress-
ing is determined by the sequence of local extremes rather than the detailed stress path between these
extremes.
Example Warnings on a near future upcrossing of a critical level u by the process X(t ) may be given on
the basis of the behavior of the sample trajectory of Y(t ) observed up to present time. An alarm policy
can be determined on the basis of the Slepian model vector process for the behavior of Y(t ) given that X
has an upcrossing of the critical level u at a given time. On this basis there is a theory of optimal alarm
policy [45, 51].
It is seen from these examples and the examples of the next chapter that Slepian vector model pro-
cesses are well suited for insight giving reasoning concerning sample function behavior at level upcross-
ings. The reasoning is often approximate in particular with respect to the way the residual process is
treated, of simply because the residual process in some applications is completely neglected. Therefore
it is important to be able to verify the results by other methods or by simulation. Simple procedures for
simulating sample functions of Slepianmodel processes for bothstationary andnon-stationary Gaussian
processes are described in the literature [52, 53]. Simulations corresponding to the non-stationary case
may serve to test the sensitivity of the results to departure from the stationarity assumption underlying
most reported applications of the Slepian model process concept.
1.16 Applications of Slepian model processes in stochastic mechan-
ics
Instochastic mechanics there are several interesting problems that canbe successfully analysedby Slepian
model processes. In this chapter some examples concerning random vibrations of elastic and elasto-
Dimension Reduction and Discretization 57
plastic oscillators will be treated in detail. Before this some other useful examples of applications will be
summarized.
Example Of relevance for the design conditions for vehicles aimed for travelling on rough roads there
have been made probabilistic studies of the jumps and bumps of an idealized vehicle consisting of a
single wheel of zero mass connected through a linear spring and a viscous damper to a concentrated
mass [54]. Since the wheel can only be in compressive contact with the randomroad surface it is a critical
crossing event when the wheel looses contact and the mass starts a free ight until the wheel bumps into
the road again. Modelling the road surface as a Gaussian eld over which the one-wheel vehicle travels
with constant speed, the Slepian model vector process is the obvious tool for such a study.
Example Close approximations to the distribution of the duration of a wide band Gaussian process visit
to an interval can be obtained by use of Slepian process models [55]. This problem is equivalent to the
problem of calculating the distribution of the time to rst passage out of the interval. Its relevance in
structural reliability is therefore obvious. A specic application concerns fatigue accumulation in elastic
bars that may vibrate strongly within disjoint random time intervals due to the vortex shedding effect of
the natural wind. Between these intervals only weak vibrations occur. This is an effect of the turbulent
nature of the natural wind and the so-called lock-in phenomenon originating from the coupling be-
tween the movements of the bar and the surrounding velocity eld. As a simplied engineering model it
may be assumed that damped harmonic vibrations start up when the velocity in front of the bar crosses
into some specied interval determined by a natural frequency of the bar and the mechanical damping.
Further it may be assumed that the vibrations damp out when the velocity crosses out of the interval
again. For this model it is of interest to be able to determine the distribution of the duration of an ar-
bitrary visit of the wind velocity process to the critical interval. By use of the distribution and the mean
number of incrossings to the critical interval it is possible to calculate the expected accumulated damage
during a given time under the adoption of a linear accumulation law such as the Palmgren-Miner rule
[56, 57].
Example The level crossing behavior of envelope processes associated to narrowband randomvibration
response processes is of interest for the study of the long run distribution of the distances between the
clumps of response process exceedances outside critical response levels.
Envelope excursions above a level u may take place without there being any upcrossings of the re-
sponse process during the time of these excursions. Such envelope excursions are said to be empty.
Otherwise they are said to be qualied [58]. For an ergodic narrow-band Gaussian process the distances
between the clumps of response process exceedances are approximately the same as the distances be-
tween the qualied envelope excursions for any reasonably useful envelope denition. Thus it is relevant
to estimate the long runfractionof qualied envelope excursions among all the envelope excursions [58].
Let X(t ) be an ergodic narrow-band Gaussian process and let
X(t ) be its Hilbert transformsimply de-
ned by making a phase shift of /2 in the spectral representation of X(t ). Then a convenient envelope
process is dened as the norm
_
X(t )
2
+
X(t )
2
of the vector process (X(t ),
X(t )) [2]. The excursions of the
envelope above level u obviously become coincident with the excursions of the vector process outside
the circle of radius u and centre at the origin (the level circle). Among these excursions the qualied ex-
cursions are those for which X(t ) >u. Since the probabilistic structure of the vector process is invariant
to a rotation of the co-ordinate system, it follows that the points of crossing out of the level circle are
uniformly distributed on the circle. Therefore the long run fraction of empty excursions can be approx-
58 Structural Reliability
imately estimated by calculating the probability that a randomly chosen tangent to the level circle does
not have points in common with the trajectory of the linear regression part of the Slepian model vector
process of (X(t ),
X(t )) corresponding to an outcrossing of the level circle taking place at the point (u, 0)
to time t 0.
For a given outcrossing velocity vector this linear regression trajectory is a xed curve that in polar
coordinates can be conveniently approximated by the second degree Taylor expansion with respect to t
of the radius vector r (t ) and of the polar angle (t ). By use of this approximation it can be shown that
the excursion trajectory asymptotically as
2
1
/(
0
2
) 1 (
n
nth spectral moment of X(t ), (1.223)) can
be approximated by a simple translation of the level circle to t tangentially to the outcrossing velocity
vector. In this asymptotic limit it is thus a simple geometric consideration to obtain the aforementioned
probability conditional on the outcrossing velocity vector. By conditioning considerations analogous to
those in Section 2.14 it can be seen that the velocity vector (
X(0),
X(0)) conditional on the outcrossing
taking place through the time window [0, dt ] can be expressed by
X(0) W
_
2
1
(1.271)
X(0) U
_
2
1
+
1
u (1.272)
where W is a standard Rayleigh variable and U is a standard normal variable. Finally unconditioning
leads to the long run fraction of qualied envelope excursion above level u ( 1/2), or outside the
interval [u, u] (1), to be approximately [59, 60]
r 12
_
u
0
()
_
_
_
_
_
1
_
2
2
_
u
2
2
u
_
1
u
2
2
u
_
_
_
_
_
d (1.273)
in which
_
(
0
2
/
1
)[(
0
2
/
1
) 1].
Of relevance for random vibrations of strain hardening elasto-plastic oscillators these Slepian model
process applications can be extended to excursions outside unsymmetric intervals [u
l
, u
u
], considering
the possibility of having empty excursions simultaneously at both ends of the interval or only at the one
or the other end of the interval [60].
Example The equation of motion of a linear single degree of freedomoscillator can be written on dimen-
sionless form as
X() +2
X() +(1+
2
)X() N() (1.274)
such that the stationary dimensionless response process X() has zero mean, unit standard deviation,
and correlation function
r () e
[[
(cos+sin [ [) (1.275)
under stationary white noise excitation N() of intensity 4(1+
2
), that is, Cov[N(
1
), N(
2
)] 4(1+
2
)(
1
2
), where () is Diracs delta function. (Standard formulation: x +2
0
x +
2
0
x f (t )/m, x
= displacement, t = time, m = mass, = damping ratio (0 1),
0
= natural frequency for 0,
f (t ) = stationary white noise of intensity S. Dimensionless variables:
0
_
1
2
t , X() x(t )/,
2
Var[X(t )] S/(4
3
0
m
2
) for x(t ) stationary, /
_
1
2
, N() f (t )/[(1
2
)m
2
0
]).
Dimension Reduction and Discretization 59
The spectral increment of the response process X() is obtained directly by operating onthe equation
of motion (1.268) or by Fourier transformation of r () given by (1.269) as
dG()
dF()
[
2
(1
2
)]
2
+4
2
(1.276)
where dF() is the spectral increment of the excitation process H(), that is,
dF()
4
(1+
2
)d (1.277)
It follows from (1.275) (or from (1.276) using (1.223)) that
0
r (0) 1,
2
r
tt
(0) 1+
2
, and
n
for n 3.
According to (1.254) and (1.15) (or (1.221)) the Slepian model process X
u
() for the response X() in
the vicinity of an upcrossing of the level u at 0 becomes
X
u
() r ()u r
t
()Z/
2
+R
1
() [(cos+sin [ [)u +Z sin]e
[[
+R
1
() (1.278)
Substitution of (1.275) in (1.228) leads to
Cov[R
1
(
1
), R
1
(
2
)] e
[
1
2
[
[cos(
1
2
) +sin([
1
2
[)]
e
([
1
[+[
2
[)
[(1+
2
) cos(
1
2
) +sin([
1
[ +[
2
[)
2
cos([
1
[ +[
2
[)] (1.279)
By letting
4
the Slepian model process (1.264) can be used herein to obtain the Slepian model
process X
mi n
() for the response X() in the vicinity of a local minimum at 0. Since b() 0, (1.266),
and c() r (), (1.267), for
4
, we get the limit Slepian model process
X
mi n
()
X
max
()
_
X(0)r () +R
2
() (1.280)
that since Z disappears from the Slepian model for
4
also is the Slepian model X
max
() for the
response X() in the vicinity of a local maximum at 0. The abscence of Z in the limit
4
is
related to the fact that the derivative process
X() is not differentiable. The covariance function of R
2
()
is identical to that of R
1
() given by (1.16).
>From the rst example in the previous paragraph we have the paradoxial result that the local maxi-
mal values and the local minimal values have normal distribution identical to the one-dimensional dis-
tribution of X() itself. This result is obtained in spite of the fact that the sample functions of X() for
small damping ( << 1) appears to have narrow band nature such as described by the Slepian models
(1.278) or (1.280) (and as it is also seen fromthe spectrum(1.276)). Nevertheless, since 0 for
4
,
the process is categorized to be a wide band process.
This paradox can be cleared up by the following consideration. According to the normality of X
max
,
negative values of X
max
are just as probable as positive values. Assume that y <0 is given as such a local
maximum value. Then the Slepian model (1.280) with X(0) y shows that the expectation of X
max
()
has a local minimum for 0, that is, it curves upwards while the realization of the process itself curves
downwards in the vicinity of this point. Since the residual standard deviation as obtained from (1.16) for
[ [<
D[R
2
()]
_
1e
2[[
(1.281)
60 Structural Reliability
is small for <<1, it follows that there is a large probability that there are minima next to the maximum
at y at almost the same value level. Thus the local maxima and minima correspond to small buckles on
the sample function. If these buckles are imagined to be smoothed out, the sample function by and large
behaves as the trajectory of an oscillatory motion between crests and troughs with period 2 and slowly
varying amplitude and phase.
The following argument shows that this amplitude of the smoothed realization has a distribution that
asymptotically for 0 is a Rayleigh distribution. Consider the Slepian model process X
u
() dened
by (1.278) for any level u > 0. For simplcity of the argument assume that is sufciently small to be
neglected at least for varying from the upcrossing of level u at 0 until the mean of X
u
() reaches its
maximum. Moreover, assume that the residual process R
1
() can be neglected in this time interval. Then
(1.278) becomes
X
u
() ucos+Z sin, 0 (1.282)
for which the rst local maximum is at the smallest value of for which tan Z/u and the correspond-
ing maximum value is
M u
_
1+
_
Z
u
_
2
(1.283)
This value is denoted as a crest value. Since Z has a standard Rayleigh distribution asymptotically for
0 we have
P(M >x [ M >u) P(Z >
_
x
2
u
2
) e
(1/2)x
2
/e
(1/2)u
2
(1.284)
which shows that the conditional distribution of M given M >u is a standard Rayleigh distribution trun-
cated at level u.
The fact that the mean function of the Slepian model process X
max
() is symmetric in and that the
residual standard deviation is small in the vicinity of 0 shows that the small buckles must predomi-
nantly be located at the troughs and the crests of the sample curve.
Consistency between the normal distribution of the local maxima and the Rayleigh distribution of
the crest values is then only achieved if the random number of local maxima or local minima (buckles)
at a crest or a trough are relatively distributed in the proportion 1/x where x is the amplitude.
Example Assume that the linear oscillator considered in the previous example is made nonlinear by the
introductionof symmetric elasticity limits at dimensionless elastic displacement levels u >0 andu, and
that the yielding beyondthese limits is ideal plastic. (Interms of the variables of the standardformulation
we have u 2x
m
0
_
0
/
_
S, where x
is the elastic displacement limit of the physical oscillator). At
any time measuring the response relative to the current value of the accumulated plastic displacement
we then have the dimensionless equation of motion for the symmetric elasto-plastic oscillator (EPO) as
the following modication of (1.274):
X() +(1+
2
)u N() for X() >u (1.285)
X() +2
X() +(1+
2
)X() N() for u X() u (1.286)
X() (1+
2
)u N() for X() <u (1.287)
The viscous damping is not considered to be important in the plastic domain, and for simplicity it is
neglected in (1.285). The oscillator with (1.274) as equation of motion is denoted as the associated linear
oscillator (ALO) to the EPO.
Dimension Reduction and Discretization 61
If the elasticity limit u is large as compared to 1, the stationary response of the EPO will most of the
time behave quite similar to the stationary response of the ALO, that is, almost as a stationary Gaussian
process of zero mean, and covariance function (1.275). However, once in a while the EPO response will
cross the elasticity limit u. This results in a transient behavior of bouncing between the upper and the
lower plastic domain a random number of times before the response returns for a shorter or longer time
to the elastic domain.
Since this shorter or longer time of elastic vibrations must start with zero velocity either at the dis-
placement u or at the displacement u relative to the current plastic displacement, it behaves like a
non-stationary response to the ALO as long as it stays within the elasticity limits. More precisely this can
be expressed as follows: Given that the EPO response is within the elasticity limits in a time interval of
length at least T after the start of the interval, then the probabilistic structure of the EPO response is in
the interval up to T identical to the conditional probabilistic structure of the ALOresponse with the same
initial conditions, given that the ALO response is within the elasticity limits for a longer time than T.
The result of the bouncing of the EPO response between the upper and the lower plastic domain is a
net plastic displacement increment
(
1
2
+
3
... +(1)
N
N+1
) (1.288)
where
i
is the absolute value of the displacement increment from the i th visit in the same clump to
the plastic domain. The sign +/ is used if the rst visit is to the upper/lower plastic domain. The
rst displacement increment
1
in the clump has as a random variable another distribution than the
following mutually independent and identically distributed randomvariables
2
,
3
.... This follows from
the fact that
2
,
3
, ... all come from an initial start of zero velocity at the elasticity limit, which is not the
case for
1
. The number of terms in the sum (1.288) is determined by a random variable N that has the
geometric distribution
P(N n) (1p)p
n
, n 0, 1, ... (1.289)
in which p is the robability that the EPO response moves directly from zero velocity at the elasticity limit
u to the opposite plastic domain beyond u. Thus N is the random waiting time until a plastic dis-
placement clump is completed.
In the following it will be shown that Slepian model process considerations applied to the ALO re-
sponse can be used to obtain closed form approximate expressions for the distributions of
i
for i 1
and i >1 and also to obtain the probability p in equation (1.289). Closed formapproximations to the dis-
tribution of the accumulated net plastic displacement increment (1.288) and the accumulated absolute
displacement increment
1
+
2
+... +
N+1
(1.290)
from a clump can be obtained on the basis of these distributions [61].
The Slepian process model X
max
() dened in (1.280) gives the conditional probability
P[X() >u [ X(0) z] P[R
2
() z >u]
_
u z
_
(1.291)
in which
e
,
_
1
2
(1.292)
62 Structural Reliability
according to (1.275) and (1.281).
Identifying X(0) with the standard Rayleigh variable M and applying (1.291) in Bayes formula then
gives the conditional density
f
M
(z [ X() >u) P[X() >u [ X(0) z] f
M
(z)
_
u z
_
ze
1/2z
2
, z >0 (1.293)
This density function is directly interpreted as the density function of the crest values sampled along
a realization of the stationary ALO response but censored to include only those crest values that half
a period before the crest are accompanied by a value of the realization above level u. Taking this
censoring rule supplemented with lower truncation at level u as a characterization of the beginning of
an outcrossing clump that starts out at level u, (1.293) gives for z >u the shape of the density function of
the rst crest value in a clump given that the clump starts at the upper level u.
The density function (1.293) is for z > u also approximately the density function of the rst crest
value in the rst clump of crest values above level u of the transient response that corresponds to the
initial condition of zero velocity and displacements equal to u or u with probability 1/2 on each pos-
sibility. This is a consequence of having slowly varying amplitude over the period 2 because then the
last crest/trough value in a clump of crest/trough values above/below level u/ u is not much different
fromthe initial value u/u. Thus the density function (1.293) can be applied even for small values of the
yield limit to determine a good approximation to the distribution of the excess energy (M
2
u
2
)/2 of the
ALO available for the EPO to be dissipated into plastic work after the rst yield limit crossing in a clump
of crossings. Assuming that the plastic work u
1
is equal to the excess energy the plastic displacement
becomes
1
2u
(M
2
u
2
) (1.294)
For white noise excitation the energy balance assumption (1.294) is a close approximation to what
is obtained by solving the part of the differential equation (1.285) that corresponds to movement in the
plastic domain and with the proper initial conditions (matching conditions between ALO and EPO) at
yield limit impact [62]. Then from (1.293) and (1.294) we get the approximating density function
f
1
(x) f
M
(
_
u
2
+2ux)
u
_
u
2
+2ux
_
1
(u
_
u
2
+2ux)
_
e
ux
, x >0 (1.295)
The normalizing constant to be multiplied to the right side of (1.295) is obtained by integration by parts
to be u/[1(1+)(u)] in which
1
_
1
1+
,
1
2
1+
2
(1.296)
The distribution of the plastic displacement that results from start of the EPO with zero velocity at
the level u, given that is passes through the yield level at u in the rst cycle, is obtained by changing the
conditioning in (1.293) from X() >u to X() u. This simply implies that (1.293) is replaced by
f
M
(z [ X() u)
_
u z
_
ze
(1/2)z
2
z
_
z u
_
, z >0
(1.297)
Dimension Reduction and Discretization 63
which in the same way as in (1.295) gives the common density function of
2
,
3
, ... as
f
2
(x)
_
1
(
_
u
2
+2ux u)
_
, x >0 (1.298)
The normalizing constant to be multiplied to the right hand side of equation (1.298) is u/[
2
(u) +
u(u)].
The probability p(u) that exceedance of level u actually occurs within the rst period is directly ob-
tained from the complementary distribution function of M given X() u. According to (1.297) we
have
1F
M
[x [ X() u]
_
x
z
_
z u
_
dz
_
0
z
_
z u
_
dz
_
x u
_
+u
_
x u
_
u
_
+u
_
u
_ (1.299)
which for x u gives
p(u)
2(u) +(1
2
)u(u)
2
_
1
2
2
u
_
+(1
2
)u
_
1
2
2
u
_
(1.300)
It is seen that p(u) (u) asymptotically as u .
These Slepian model based results have been successfully veried to be very good approximations
to the empirical distributions obtained by simulation of the response of the EPO [61]. Moreover, there
is a very convincing approximate numerical coincidence of the density (1.298) of
2
with a density of
a completely different analytical appearance obtained by solving a diffusion equation (Fokker-Planck
equation) for the slowly varying amplitude formulated by the method of stochastic averaging [63].
64 Structural Reliability
Bibliography
[1] Kolmogorov, A.N., Grundbegriffe der Wahrscheinlichkeitsrechnung, Erg. Mat. 2(3), 1933.
[2] Cramer, H., andLeadbetter, M.R., Stationary and Related Stochastic Processes, Wiley, NewYork, 1967.
[3] Journel, A.B. and Huijbregts, C.J., Mining Geostatistics, Academic Press, New York, 1978.
[4] Krige, D.G., Two-dimensional Weighted Moving Averaging Trend Surfaces for Ore Evaluation. Proc.
Symposium on Mathematical Statistics and Computer Applications for Ore Evaluation, Johannes-
burg, S.A., 13-38, 1966.
[5] Matheron, G., Principles of Geostatistics, Economic Geology, Vol. 58, pp. 1246-1266, 1962.
[6] Matheron, G., Estimating and Choosing (transl. from French by A.M. Hasofer), Springer Verlag,
Berlin-Heidelberg, 1989.
[7] Loeve, M., Probability Theory, Van Nostrand, Princeton, N.J., 3rd ed., 1963.
[8] Lawrence, M., Basis random variables in nite element analysis. Int. J. of Numerical Methods in
Engrg., 24(10), 1849-1863.
[9] Spanos, P.D., and Ghanem, R.G., Stochastic nite element expansion for random media. Journal of
Engineering Mechanics, ASCE, 115(5), 1989, 1035-1053.
[10] Ghanem, R., and Spanos, P.D., Spectral Stochastic nite-element formulation for reliability analysis.
Journal of Engineering Mechanics, ASCE, 117(10), 1991, 2351-2372.
[11] Ghanem, R.G., and Spanos, P.D., Stochastic nite elements: a spectral approach, Springer Verlag,
New York, N.Y., 1991.
[12] Li, C.-C. and Der Kiureghian, Optimal discretization of random elds. Journal of Engineering Me-
chanics, ASCE, 119, 1993, 1136-1154.
[13] Ditlevsen, O., and Munch-Andersen, J., Empirical stochastic silo load model. Part 1: Correlation
theory. Journal of Engineering Mechanics, ASCE, 121(9), 1995, 973-980.
[14] Roberts, J.B., and Spanos, P.D., Random vibration and statistical linearization, Wiley, Chichester,
UK, 1990.
[15] Sondhi, M.M., Randomprocesses with specied spectral density and rst-order probability density.
The Bell System Technical Journal, 62(3), 1983, 679-701.
65
66 Structural Reliability
[16] Der Kiureghian, A., Liu, P.-L., Structural reliability under incomplete probability information, Jour-
nal of Engineering Mechanics. ASCE, 112, 1986, 857-865.
[17] Ditlevsen, O., Christensen, C., and Randrup-Thomsen, S., Reliability of silo ring under lognormal
stochastic pressure using stochastic interpolation. Proc. of IUTAM Symposium: Probabilistic Struc-
tural Mechanics: Advances in Structural Reliability Methods, San Antonio, Texas, June 1993. (eds.:
P.D. Spanos and Y.-T. Wu), Springer Verlag, 1994, 134-162.
[18] Ditlevsen, O., Discretization of randomelds in beamtheory. Proc. of ICASP7: Applications of Statis-
tics and Probability. Civil Engineering Reliability and Risk Analysis (eds.: Lemaire, M., Favre, J.-L.,
and Mebarki, A.). Balkema, Rotterdam, 1995, 983-990.
[19] Ditlevsen, O., Christensen, C., and Randrup-Thomsen, S., Empirical stochastic silo load model. Part
3: Reliability applications. Journal of Engineering Mechanics, ASCE, 121(9), 1995, 987-993.
[20] Der Kiureghian, A. and Ke, J-B., The stochastic nite element method in structural reliability. Prob-
abilistic Engineering Mechanics, 3(2), 1988, 83-91.
[21] Vanmarcke, E.H., and Grigoriu, M., Stochastic nite element analysis of simple beams. Journal of
Engineering Mechanics, ASCE, 109(5), 1983, 1203-1214.
[22] Liu, W.K., Mani, A., and Belytschko, T., Random eld nite elements. Int. J. Numerical Methods in
Engrg., 23(10), 1986, 1831-1845.
[23] Grigoriu, M., Crossing of non-Gaussian translation processes, Journal of Engineering Mechanics,
ASCE, 110(4), 1984, 610-620.
[24] Takada, T., Weighted integral method in multi-dimensional stochastic nite element analysis. Prob-
abilistic Engineering Mechanics, 5(4), 1990, 158-166.
[25] Deodatis, G. and Shinozuka, M., Weighted integral method I: Stochastic Stiffness matrix, Journal of
Engineering Mechanics. ASCE, 117, 1991, 1851-1864.
[26] Zhang, J., and Ellingwood, B., Orthogonal Series expansion of random elds in rst-order reliability
analysis. Journal of Engineering Mechanics, ASCE, 120(12), 1994, 2660-2677.
[27] Wong, E., Stochastic Processes in Information and Dynamical Systems, McGraw-Hill, NewYork, 1971.
[28] Bucher, C.G., and Brenner, C.E., Stochastic response of uncertain systems. Archive of Appl. Mech.,
62, 1992, 507-516.
[29] Winterstein, S.R., Nonlinear vibration models for extremes and fatigue, Journal of Engineering Me-
chanics, ASCE, 114, 1988, 1772-1790.
[30] Ditlevsen, O., and Madsen, H.O., Structural Reliability Methods, Wiley, 1996.
[31] Ditlevsen, O., Mohr, G., and Hoffmeyer, P., Integration of non-Gaussian elds. Probabilistic Engi-
neering Mechanics, 1995.
[32] Mohr, G., and Ditlevsen, O., Partial summations of stationary sequences of non-Gaussian random
variables. Probabilistic Engineering Mechanics, 1995.
Dimension Reduction and Discretization 67
[33] Keaveny, J.M., Nadim, F. and Lacasse, S., Autocorrelation Functions for Offshore Geotechnical Data,
in Structural Safety &Reliability, Vol. 1 (Ed. Ang, A.H.-S., Shinozuka, M. and Schuller, G.I.), 263-270,
Proceedings of ICOSSAR89, the 5th International Conference on Structural Safety and Reliability,
San Francisco, August 7-11, 1989. ASCE, New York, 1990.
[34] Kameda, H. and Morikawa, H., An interpolating stochastic process for simulation of conditional
random elds. Probabilistic Engineering Mechanics, 7(4), 1992, 243-254.
[35] Ditlevsen, O., Random eld interpolation between point by point measured properties. Computa-
tional Stochastic Mechanics (P.D. Spanos, C.A. Brebbia, eds.), Computational Mechanics Publica-
tions, Southampton, Boston, Elsevier Applied Science, London, New York, 1991, 801-812.
[36] Munch-Andersen, J., Ditlevsen, O., Christensen, C., Randrup-Thomsen, S., and Hoffmeyer, P., Em-
pirical stochastic silo load model. Part 2: Data analysis. Journal of Engineering Mechanics, ASCE,
121(9), 1995, 981-986.
[37] Ditlevsen, O. and Gluver, H., Parameter estimation and statistical uncertainty in random eld rep-
resentations of soil strength. Proc. CERRA-ICASP6: Sixth international conference on applications
of statistics and probability in civil engineering (L. Esteva, S.E. Ruiz, eds.), Institute of Engineering,
UNAM, Mxico City, 691-704, 1991.
[38] Ditlevsen, O.,Measuring uncertainty correction by pairing. Proceedings of ICOSSAR93 - The 6th
International Conference on Structural Safety & Reliability, (eds.: Schuller, Shinozuka & Yao),
Balkema, Rotterdam, 1994, pp. 1977-1983.
[39] Ditlevsen, O., Uncertainty Modeling. McGraw-Hill Inc, New York, 1981.
[40] Rice, S.O., Mathematical Analysis of RandomNoise, Bell SystemTechnical Journal, 23, 1944, 282-332,
and 24, 1944, 46-156. Reprinted in Selected Papers in Noise and Stochastic Processes (ed.: N. Wax),
Dover, New York, 1954.
[41] Leadbetter, M.R., Lindgren, G., and Rootzn, H., Extremes and Related Properties of Random Se-
quences and Processes, Springer-Verlag, New York, 1983.
[42] Kac, M., and Slepian, D., Large Excursions of Gaussian Processes. Annals of Mathematical Statistics,
30, , 1959, 1215-1228.
[43] Slepian, D., On the Zeros of Gaussian Noise, in Time Series Analysis (ed.: M. Rosenblatt), Wiley, New
York, 1962, 143-149.
[44] Lindgren, G., Functional Limits of Empirical Distributions in Crossing Theory, Stochastic Process.
Appl., 5, 1977, 143-149.
[45] Lindgren, G., Use and Structure of Slepian Model Processes for Prediction and Detection in Crossing
and Extreme Value Theory. CODEN: LUNFD6/(NFMS-3079)/1-30/(1983), Univ. of Lund, Dept. of
Math. Sta., Box 725, S-220 07 Lund, Sweden, 1983.
[46] Lindgren, G., Local Maxima of Gaussian Fields. Ark. Mat., 10, 1972, 195-218.
[47] Wilson, R.J., and Adler, R.J., The Structure of Gaussian Fields Near a Level Crossing. Adv. Appl. Prob-
ability, 14, 1982, 543-565.
68 Structural Reliability
[48] Lindgren, G., On the Use of Effect Spectrum to Determine a Fatigue Life Amplitude Spectrum. ITM-
Symposium on Stochastic Mechanics, Lund, 1983, CODEN: LUTFD2/(TFMS-3031)/1-169/(1983),
Univ. of Lund, Dept. of Math. Stat., Box 725, S-220 07 Lund, Sweden, 1983.
[49] Lindgren, G. and Rychlik, I., Wave Characteristic Distributions for Gaussian Waves - Wave-length,
Amplitude and Steepness. Ocean Engng. 9, 1982, 411-432.
[50] Rychlik, I., Regression approximations of wave length and amplitude distributions. Advances in Ap-
plied Probability, 19, 1987, 396-430.
[51] Lindgren, G., Model Processes in Nonlinear Prediction with Application to Detection and Alarm.
Ann. Probab. 8, 1980, 775-792.
[52] Hasofer, A.M., Slepian Process of a Non-stationary Process. ASCE Probabilistic Mechanics and Struc-
tural and Geotechnical Reliability (ed: Y.K. Lin), 1992, 296-299.
[53] Hasofer, A.M., Representation for the Slepian process with applications. Journal of Sound and Vi-
bration, 124(3), 1988, 435-441.
[54] Lindgren, G., Jumps and Bumps on Random Roads. Journal of Sound and Vibration, 78, 1981, 383-
395.
[55] Ditlevsen, O., Duration of Visit to Critical Set by Gaussian Process. Probabilistic Engineering Me-
chanics, 1(2), 1986, 82-92.
[56] Ditlevsen, O., Non-Gaussian Vortex Induced Aeroelastic Vibrations under Gaussian Wind. A Slepian
Model Approach to Lock In. ASCE Probabilistic Mechanics and Structural and Geotechnical Relia-
bility (ed: Y.K. Lin), 1992, 292-295.
[57] Christensen, C.F., and Ditlevsen, O., Fatigue damage fromrandomvibration pulse process of tubular
structural elements subject to wind. Third International Conference on Stochastic Structural Dy-
namics. San Juan, Puerto Rico, Jan. 1995.
[58] Vanmarcke, E.H., On the distribution of the rst-passage time for normal stationary random pro-
cesses. American Society of Mechanical Engineers, Journal of Applied Mechanics, 42, 1975, 215-220.
[59] Ditlevsen, O., and Lindgren, G., Empty envelope excursions in stationary Gaussian processes. Jour-
nal of Sound and Vibration, 112, 1988, 571-587.
[60] Ditlevsen, O., Qualied envelope excursions out of an interval for stationary narrow-band Gaussian
processes. Journal of Sound and Vibration, 173(3), 1994, 309-327.
[61] Ditlevsen, O., and Bognr, L., Plastic displacement distributions of the Gaussian white noise excited
elasto-plastic oscillator. Probabilistic Engineering Mechanics, 8, 1993, 209-231.
[62] Ditlevsen, O., Elasto-plastic oscillator with Gaussian excitation. Journal of Engineering Mechanics,
ASCE, 112(4), 1986, 386-406.
[63] Roberts, J.B., The yielding behaviour of a randomly excited elasto-plastic structure. Journal of Sound
and Vibration, 72, 1980, 71-85.
Dimension Reduction and Discretization 69
Related papers on randomelds by the author et al, published after 1996:
[64] Ditlevsen, O., Distributions of extremes of random elds over arbitrary domains with application to
concrete rupture stresses. Probabilistic Engineering Mechanics, 19(4), 2004, 373-384
[65] Franchin, P., Ditlevsen, O., and Der Kiureghian, A., Model correction factor method for reliability
problems involving integrals of non-Gaussian random elds. Probabilistic Engineering Mechanics,
17, 2002, pp. 109-122
[66] Ditlevsen, O., Tarp-Johansen, N.J., and Denver, H., Bayesian Soil Assessments Combining Prior with
Posterior Censored Samples. Computers and Geotechnics, 26(3-4), 2000, 187-198
[67] Ditlevsen, O. and N.J. Tarp-Johansen, N.J., Choice of input elds in stochastic nite elements. Prob-
abilistic Engineering Mechanics, 14, 1999, 63-72.
[68] Hasofer, A.M., Ditlevsen, O., and Tarp-Johansen, N.J., Positive random elds for modeling material
stiffness and compliance. ICOSSAR97, Kyoto, Japan, Nov. 24-28, 1997. Structural Safety and Reliabil-
ity (eds.: N. Shiraishi, M. Shinozuka, Y.K. Wen), Balkema, Rotterdam, 1998, 723-730.
Related papers on elasto-plastic oscillators (Slepian model processes) by the author et al, pub-
lished after 1996:
[69] Lazarov, B., and Ditlevsen, O., Slepian simulation of distributions of plastic displacements of earth-
quake excited shear frames with a large number of stories. Probabilistic Engineering Mechanics 20,
2005, 251-262.
[70] Lazarov, B., and Ditlevsen, O., Simulation by Slepian method of plastic displacements of Gaussian
process excited multistory shear frame. Probabilistic Engineering Mechanics, 19(1-2), 2004, 113-126
[71] Ditlevsen, O., and Lazarov, B., Slepian simulation of plastic displacement distributions for shear
frame excited by ltered Gaussianwhite noise ground motion. InApplications of Statistics andProba-
bility inCivil Engineering (eds.: ArmenDer Kiurighian, Samer Madanat, JuanM. Pestana), Millpress,
Rotterdam, pp. 259-266. Proc.of ICASP9, July 6-9, 2003, San Francisco, USA.
[72] Tarp-Johansen, N.J., and Ditlevsen, O., Time between plastic displacements of elasto-plastic oscil-
lators subject to Gaussian white noise. Probabilistic Engineering Mechanics, 16(4), 2001, 373-380
[73] Ditlevsen, O., Randrup-Thomsen,S.R., and Tarp-Johansen, N.J., Slepian approach to a Gaussian ex-
cited elasto-plastic frame including geometric nonlinearity. Nonlinear Dynamics, 24, 2001, 53-69
[74] Ditlevsen, O., and Tarp-Johansen, N.J., Slepian modeling as a computational method in random vi-
bration analysis of hysteretic structures. Third International Conference on Computational Stochas-
tic Mechanics. Island of Santorini, Greece, June 14-17, 1998.In: Computational Stochastic Mechan-
ics (ed.: P.D.Spanos), A.A.Balkema, Rotterdam,1999, 67-78
[75] Randrup-Thomsen, S. andDitlevsen, O., Experiments withelasto-plastic oscillator. Probabilistic En-
gineering Mechanics, 14, 1999, 161-167.
[76] Ditlevsen, O., and Tarp-Johansen, N.J., White noise excited non-ideal elasto-plastic oscillator. Acta
Mechanica, 125, 1997, 31-48
Index
n-dimensional normal, 11
alarm policy, 56
associated linear oscillator, 60
Bayesian method, 45
Bayesian statistical method, 37
buckles, 60
bumps, 57
censored data, 46
Choleski decomposition, 13
classical interpolation, 33
clipped sampling case, 46
clumps of response process exceedances, 57
coherence function, 10
computational practicability, 38
conditional expectation, 8
Cone Penetration Test, 39, 43
correlation coefcient, 7
covariance function, 17
CPT method, 39
CPT-method, 43
crests, 60
density, 11
density function of the crest values, 62
design conditions for vehicles, 57
destructive testing measurements, 42
Direct linear regression, 30
duration of a wide band Gaussian process, 57
empty excursions, 58
Envelope excursions, 57
envelope processes, 57
ergodicity, 52
exponential transformation, 16
factorized correlation structure, 38
fatigue accumulation, 57
fatigue life studies, 56
rst passage, 57
Fokker-Planck equation, 63
foundation on saturated clay, 38
Gaussian, 11
Gaussian closure, 13
Gaussian density, 45
geometric distribution, 61
gradient, 12
Hilbert transform, 57
homogeneous, 18
homogeneous Markov eld, 40
homogeneous Poisson stream, 25
horizontal window crossings, 50
increasing marginal transformation, 16
Integral average method, 30
interpolation, 33
interpolation functions, 20, 36
isotropic elds, 39
J. de Mar, 54
joint density of wave length and amplitude, 55
joint Gaussian density, 38
Kac, 53
Karhunen-Loeve expansion, 31
Kolmogorov, 4
Krige, 5
kriging, 20, 30
Lagrange, 33
Lagrangian remainder, 33
likelihood function, 38, 45
Lindgren, 53
linear functionals, 21
linear interpolation in the mean, 36
linear regression, 6
linear single degree of freedom oscillator, 58
local maxima, 60
70
Dimension Reduction and Discretization 71
local maximum, 55, 59
local maximum values, 54
local minimum, 59
local minimum values, 54
lock-in phenomenon, 57
lognormal distribution, 16, 18
long run density, 54
long run fraction of qualied envelope excursion, 58
long run sampling, 53
marginal median point, 16
marginal transformation, 18
marginally backtransformed linear regression, 30
Markovian, 28
maximum likelihood estimation, 34
maximum likelihood principle, 45
mean rate of upcrossings, 51
mean value correct backtransformed linear regression,
30
mean value function, 17
measuring error model, 40
Midpoint method, 30
minima, 60
narrow band process, 55
Nataf eld, 18, 31
noisy data, 40
non-Gaussian distributions, 16
non-informative prior, 37, 45
nonlinear functions, 11
nonnegative denite, 17
pairing method, 41
Palmgren-Miner rule, 57
paradox, 55
Poisson load eld, 26
principle of simplicity, 34
qualied envelope excursions, 57
quotient series expansion, 40
random process, 46
random vibration, 12
random vibrations, 58
Rayleigh density, 52
Rayleigh distribution, 60
regression coefcient, 6
regression coefcient function, 10
regression coefcient matrix, 8
regularity factor, 55
residual, 6
residual covariance function, 10
residual covariance matrix, 8
residual vector process, 47
Rice, 54
Rice formula, 51
saturated clay deposit, 43
Shape function method, 30
shape functions, 20
singular normal, 11
Slepian, 53
Slepian model vector process, 53
soil body, 39
spectral moments, 48
spectral representation, 48
spectral width parameter, 55
standard Rayleigh variable, 54
standardized normal, 11
stationary, 18, 47
stochastic averaging, 63
stochastic interpolation, 33
stochastic linearization, 12
symmetric elasto-plastic oscillator, 60
troughs, 60
undrained failure, 38
undrained shear strength, 43
vane test method, 43
vortex shedding effect of the natural wind, 57
weakly homogeneous, 18
weighted integrals, 21
wide band process, 55, 59
Winterstein approximations, 32
You might also like
- Final Fullpaper AlfredoDocument8 pagesFinal Fullpaper AlfredoEnson PortelaNo ratings yet
- CosentPortelaIABMAS 2016 FullpaperDocument1 pageCosentPortelaIABMAS 2016 FullpaperEnson PortelaNo ratings yet
- Carbonation Service Life Prediction of Existing Concrete ViaductDocument11 pagesCarbonation Service Life Prediction of Existing Concrete ViaductEnson PortelaNo ratings yet
- Enson Cilamce2015 FinalDocument16 pagesEnson Cilamce2015 FinalEnson PortelaNo ratings yet
- CIB1305Document102 pagesCIB1305Enson PortelaNo ratings yet
- Constitutive Equations For Linear Elasticity Hooks LawDocument17 pagesConstitutive Equations For Linear Elasticity Hooks LawEnson PortelaNo ratings yet
- 2013 Ibracon Biondini 3Document83 pages2013 Ibracon Biondini 3Enson PortelaNo ratings yet
- 55CBC0904Document16 pages55CBC0904Enson PortelaNo ratings yet
- Kim 2006 PDFDocument8 pagesKim 2006 PDFEnson PortelaNo ratings yet
- NFL - Futebol Americano - 2011 Temporada Regular - 1 RodadaDocument4 pagesNFL - Futebol Americano - 2011 Temporada Regular - 1 RodadaEnson PortelaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Asmsc 1119 PDFDocument9 pagesAsmsc 1119 PDFAstha WadhwaNo ratings yet
- Mike She Printed v1Document370 pagesMike She Printed v1Grigoras MihaiNo ratings yet
- ImpulZ DocumentationDocument9 pagesImpulZ DocumentationexportcompNo ratings yet
- Salonga Vs Farrales Digest Ful Case PDF FreeDocument6 pagesSalonga Vs Farrales Digest Ful Case PDF FreeElyka RamosNo ratings yet
- Text-Book P3Document147 pagesText-Book P3Nat SuphattrachaiphisitNo ratings yet
- Service Laws ProjectDocument4 pagesService Laws ProjectRaman PatelNo ratings yet
- Operations Management: Green Facility Location: Case StudyDocument23 pagesOperations Management: Green Facility Location: Case StudyBhavya KhattarNo ratings yet
- Nomura, SBI Caps, IDFC, Wellington Are in Talks To Buy 10% Stake For Rs 1000 CR in Kerala-Based ManappuramDocument2 pagesNomura, SBI Caps, IDFC, Wellington Are in Talks To Buy 10% Stake For Rs 1000 CR in Kerala-Based ManappuramRaghu.GNo ratings yet
- Hyperformance Plasma: Manual GasDocument272 pagesHyperformance Plasma: Manual GasSinan Aslan100% (1)
- AWS Solution Architect SampleDocument3 pagesAWS Solution Architect SamplepandiecNo ratings yet
- Mamba Vs Lara, 608 SCRA 149 (2009) Case DigestsDocument1 pageMamba Vs Lara, 608 SCRA 149 (2009) Case DigestsAce Lawrence AntazoNo ratings yet
- Activity 2.1 Test Your Food Safety IQDocument3 pagesActivity 2.1 Test Your Food Safety IQAustin PriceNo ratings yet
- 2022 Significant FEHB Plan ChangesDocument12 pages2022 Significant FEHB Plan ChangesFedSmith Inc.No ratings yet
- NAGIOS Inspeção Relatório de DadosDocument2 pagesNAGIOS Inspeção Relatório de DadosRuben QuintNo ratings yet
- Nishat ISDocument11 pagesNishat ISSaeed MahmoodNo ratings yet
- 95 IDocument17 pages95 IsvishvenNo ratings yet
- Test Your Skills For Computer Basics: November 2013Document24 pagesTest Your Skills For Computer Basics: November 2013Charie C. OrbocNo ratings yet
- UPDATED CV-Neeraj KR - Sharma-2021.Document5 pagesUPDATED CV-Neeraj KR - Sharma-2021.supriyaNo ratings yet
- PDF 20699Document102 pagesPDF 20699Jose Mello0% (1)
- COEN 252 Computer Forensics: Incident ResponseDocument39 pagesCOEN 252 Computer Forensics: Incident ResponseDudeviswaNo ratings yet
- 10 Me 42 BDocument144 pages10 Me 42 BdineshNo ratings yet
- Operating Instruction PMD55Document218 pagesOperating Instruction PMD55Dilip ARNo ratings yet
- W01 358 7304Document29 pagesW01 358 7304MROstop.comNo ratings yet
- Workflows in RUP PDFDocument9 pagesWorkflows in RUP PDFDurval NetoNo ratings yet
- Nahid's p4 Solar Fan Final-1 EditedDocument3 pagesNahid's p4 Solar Fan Final-1 Editedrajkumar karjeeNo ratings yet
- Project 2 - Home InsuranceDocument15 pagesProject 2 - Home InsuranceNaveen KumarNo ratings yet
- 3 Filtration Lecture NotesDocument16 pages3 Filtration Lecture NotesRuben SIbayanNo ratings yet
- USA v. Sussmann - Durham Filing - Motion On Potential Conflicts of InterestDocument13 pagesUSA v. Sussmann - Durham Filing - Motion On Potential Conflicts of InterestWashington Examiner100% (3)
- IS301 P1 Theory June 2021 P1 TheoryDocument20 pagesIS301 P1 Theory June 2021 P1 Theory50902849No ratings yet
- ''Adhibeo'' in LatinDocument5 pages''Adhibeo'' in LatinThriw100% (1)