You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Bab IiiDocument16 pagesBab IiiWingky ChannelNo ratings yet
- Danfoss HST Public Documents Web Content c022873Document8 pagesDanfoss HST Public Documents Web Content c022873Timon2005100% (1)
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0231834 A1Document7 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0231834 A1Anggara T NugrahaNo ratings yet
- United States Patent 119) : K / - :I - L I// SystemDocument6 pagesUnited States Patent 119) : K / - :I - L I// Systemrte678No ratings yet
- United States Patent (191Document15 pagesUnited States Patent (191pradip panthaNo ratings yet
- Multi-Functional Loader Steering Hydraulic System Model Construction and Simulation Based On Power Bond GraphsDocument7 pagesMulti-Functional Loader Steering Hydraulic System Model Construction and Simulation Based On Power Bond GraphsDeniezRamadhanNo ratings yet
- JP2020180696A Proportional Solenoid VV in Hyd CKT PDFDocument12 pagesJP2020180696A Proportional Solenoid VV in Hyd CKT PDFRajesh CNo ratings yet
- Hand Brake SystemDocument16 pagesHand Brake SystemVinothRajagopalNo ratings yet
- Introduction To Hydraulics, Servo Drive and PLCDocument5 pagesIntroduction To Hydraulics, Servo Drive and PLCHeather Reyes100% (1)
- EP1798188A9Document10 pagesEP1798188A9EbanderNo ratings yet
- UNIT-8 Elements of Control SystemsDocument8 pagesUNIT-8 Elements of Control Systemsgkk001No ratings yet
- Pelton WheelDocument2 pagesPelton WheelRajat GiteNo ratings yet
- Us2703500 PDFDocument7 pagesUs2703500 PDFbelchior alvaroNo ratings yet
- Hydraulic Control SystemDocument16 pagesHydraulic Control SystemHeerok Kumar100% (1)
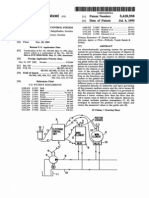
- Unlted States Piltgilt (19) (11) Patent Number: 5,428,958: Stenlund (45) Date of Patent: Jul. 4, 1995Document6 pagesUnlted States Piltgilt (19) (11) Patent Number: 5,428,958: Stenlund (45) Date of Patent: Jul. 4, 1995ZEUJNo ratings yet
- CAR 20051050 - PaperDocument6 pagesCAR 20051050 - Paperg_popa96No ratings yet
- United States Patent (19) : Bock (45) Feb. 5, 1974Document7 pagesUnited States Patent (19) : Bock (45) Feb. 5, 1974gorgiNo ratings yet
- Basic Avionics Part 1 (ATA CH 22, 23, 31)Document109 pagesBasic Avionics Part 1 (ATA CH 22, 23, 31)kristian_rimbawanNo ratings yet
- Anti Skid SystemDocument9 pagesAnti Skid SystemBarkah Khoerun NissaNo ratings yet
- KWU Steam Turbine Gov. & Protection SystemDocument13 pagesKWU Steam Turbine Gov. & Protection Systemmvpngp100% (11)
- Electro Control Equipment:: Relay Circuit UnitDocument14 pagesElectro Control Equipment:: Relay Circuit UnitMarshella Faye CaguranganNo ratings yet
- Automatic Pallet Changer Mechanism Used OnDocument6 pagesAutomatic Pallet Changer Mechanism Used OnSyakuraNo ratings yet
- Unit 6 Hydraulic and Pneumatic CircuitsDocument49 pagesUnit 6 Hydraulic and Pneumatic CircuitsshubhamrasalNo ratings yet
- Us2218760 PDFDocument3 pagesUs2218760 PDFbelchior alvaroNo ratings yet
- Write Up ON Electrohydraulic Turbine Controller (Ehtc) : Reference DocumentsDocument37 pagesWrite Up ON Electrohydraulic Turbine Controller (Ehtc) : Reference Documentsd_tantubai100% (1)
- Operator Station 4Document3 pagesOperator Station 4Anonymous cS9UMvhBqNo ratings yet
- LC2-Level Control II - Lab ReportDocument13 pagesLC2-Level Control II - Lab ReportKarishma GobinNo ratings yet
- Study of Automatic Transmission Based On Electronic Control SystemDocument10 pagesStudy of Automatic Transmission Based On Electronic Control SystemHusseenNo ratings yet
- Chapter10 (Governors)Document10 pagesChapter10 (Governors)Zohaib Anser100% (1)
- Electrohydraulic Steering GearDocument6 pagesElectrohydraulic Steering Gearyoarun5100% (2)
- Https - 127.0.0.1 - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - Prueba y Ajuste Alivio PilotoDocument3 pagesHttps - 127.0.0.1 - Sisweb - Sisweb - Techdoc - Techdoc - Print - Page - Prueba y Ajuste Alivio PilotoangelrsanchezmNo ratings yet
- Implement Electronic Control System 966Document4 pagesImplement Electronic Control System 966Ahmed RezkNo ratings yet
- 1 Akalil Bin Sultan: Diploma of Engineering Technology in Aeroplane Maintenance Theory of Flight 5-6-16Document12 pages1 Akalil Bin Sultan: Diploma of Engineering Technology in Aeroplane Maintenance Theory of Flight 5-6-16Daniel JamilNo ratings yet
- MTDocument6 pagesMTVishal Sharma75% (4)
- Neumatic Control For Robotics and Industrial AutomationDocument12 pagesNeumatic Control For Robotics and Industrial AutomationJeet PawarNo ratings yet
- Steering Gear SystemsDocument23 pagesSteering Gear SystemsEzy WaqaNo ratings yet
- Unit 7 Actuators NIKU Parted 2Document16 pagesUnit 7 Actuators NIKU Parted 2Dpk NairNo ratings yet
- Chapter 7 Steering GearDocument80 pagesChapter 7 Steering GearHafizuddin Razak100% (2)
- Prpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Document18 pagesPrpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Ajith KumarNo ratings yet
- 2 - Demonstration of Simple Hydraulic Circuits Using Trainer KitDocument12 pages2 - Demonstration of Simple Hydraulic Circuits Using Trainer KitAbhay SinghNo ratings yet
- Ia Ha 2Document4 pagesIa Ha 2Er Shubham RaksheNo ratings yet
- Systems Operation: Shutdown SIS Previous ScreenDocument163 pagesSystems Operation: Shutdown SIS Previous ScreenAngelica VergaraNo ratings yet
- Hydrostatic Transmission: GonverterDocument27 pagesHydrostatic Transmission: Gonvertermarabest3No ratings yet
- Klnce-Mech-Qbank: Page 1 of 11Document11 pagesKlnce-Mech-Qbank: Page 1 of 11mohanrajmeed2012No ratings yet
- ClosedDocument9 pagesClosedfikadu435No ratings yet
- Tractor HydraulicDocument18 pagesTractor Hydraulicakam khalid mohammedNo ratings yet
- MTS High Cycle Fatigue Machine Upgrades SpecificationsDocument3 pagesMTS High Cycle Fatigue Machine Upgrades SpecificationsplusmasNo ratings yet
- Cargador 920 & 930 Sistema HidraulicoDocument19 pagesCargador 920 & 930 Sistema Hidraulicojulio100% (1)
- CHP 26 PDFDocument13 pagesCHP 26 PDFYouMineNo ratings yet
- 972 General Electrohydraulic System OperationDocument15 pages972 General Electrohydraulic System OperationMoataz SamiNo ratings yet
- UNIT-8 Elements of Control SystemsDocument8 pagesUNIT-8 Elements of Control SystemsVenkateshYadavCivarlaNo ratings yet
- UNIT-8 Elements of Control SystemsDocument8 pagesUNIT-8 Elements of Control SystemsVenkateshYadavCivarlaNo ratings yet
- United States Patent (191: Swearingen (11) 4,287,758Document7 pagesUnited States Patent (191: Swearingen (11) 4,287,758NicandroGonzalesNo ratings yet
- 68 - Numerical Modeling of Hydraulic Power Steering SystemDocument6 pages68 - Numerical Modeling of Hydraulic Power Steering SystemGalal RabieNo ratings yet
- Steam and Power Conversion SystemDocument41 pagesSteam and Power Conversion SystemAshok K ShanmugamNo ratings yet
- Check ListDocument155 pagesCheck Listahmad sulaimanNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Finroc 2Document4 pagesFinroc 2revange2112No ratings yet
- Finroc 2Document4 pagesFinroc 2revange2112No ratings yet
- The Analysis of Excavator Operation by Skillful Operator - EDocument5 pagesThe Analysis of Excavator Operation by Skillful Operator - Erevange2112No ratings yet
- BuscaDocument2 pagesBuscarevange2112No ratings yet
- Soil Dynamics in TillageDocument14 pagesSoil Dynamics in Tillagerevange2112No ratings yet
- Agent-Based Control For Fuzzy Behavior Programming in Robotic ExcavationDocument9 pagesAgent-Based Control For Fuzzy Behavior Programming in Robotic Excavationrevange2112No ratings yet
- установкаDocument1 pageустановкаrevange2112No ratings yet
- Soil Dynamics in TillageDocument14 pagesSoil Dynamics in Tillagerevange2112No ratings yet
- IJTIR Article 201307003Document24 pagesIJTIR Article 201307003revange2112No ratings yet
- Maintenance HandbookDocument15 pagesMaintenance Handbookrevange2112No ratings yet
- 3 ME Design Final SyllabusDocument54 pages3 ME Design Final Syllabusrevange2112No ratings yet
- SEP Course Book PDFDocument36 pagesSEP Course Book PDFfandhiejavanov2009No ratings yet
- Module 2 - Overview of Computer Hardware and SoftwareDocument6 pagesModule 2 - Overview of Computer Hardware and SoftwareErichelle EspineliNo ratings yet
- CLDocument387 pagesCLAnil KumarNo ratings yet
- Ict Computer GenerationDocument8 pagesIct Computer GenerationOluwafemi AdekanyeNo ratings yet
- Hostel Management System ReportDocument15 pagesHostel Management System ReportTalha Umar SialNo ratings yet
- Computer Science 123789Document15 pagesComputer Science 123789Laxmikant TakNo ratings yet
- Fundamental of Computer MCQ: 1. A. 2. A. 3. A. 4. A. 5. A. 6. ADocument17 pagesFundamental of Computer MCQ: 1. A. 2. A. 3. A. 4. A. 5. A. 6. AacercNo ratings yet
- Programming With Python For StudentDocument69 pagesProgramming With Python For StudenthahaNo ratings yet
- Data Conversion Programs User's Manual: AspenDocument23 pagesData Conversion Programs User's Manual: Aspenmiguel itsonNo ratings yet
- Domain 6 - Security Assessment & TestingDocument20 pagesDomain 6 - Security Assessment & TestingLouie MokNo ratings yet
- Editor in Chief,+ej-Eng 2627Document6 pagesEditor in Chief,+ej-Eng 2627Ishu ReddyNo ratings yet
- How To Think Like A Programmer: Problem Solving For The BewilderedDocument23 pagesHow To Think Like A Programmer: Problem Solving For The BewilderedRachit GoelNo ratings yet
- Runtime Model Checking of Multithreaded C/C++ Programs: Yu Yang Xiaofang Chen Ganesh Gopalakrishnan Robert M. KirbyDocument11 pagesRuntime Model Checking of Multithreaded C/C++ Programs: Yu Yang Xiaofang Chen Ganesh Gopalakrishnan Robert M. KirbypostscriptNo ratings yet
- User GuideDocument490 pagesUser GuideBruno MorabitoNo ratings yet
- STM Lab 5,6,7Document20 pagesSTM Lab 5,6,7Kushal settulariNo ratings yet
- Assignment-1 Q-1 Write A Short Note On Operating System? Ans: DefinitionDocument5 pagesAssignment-1 Q-1 Write A Short Note On Operating System? Ans: DefinitionParth ChavhanNo ratings yet
- CP Material 1 1 PDFDocument261 pagesCP Material 1 1 PDFRalph Emerson SalarNo ratings yet
- I. Objectives: (Write The LC Code For Each.)Document4 pagesI. Objectives: (Write The LC Code For Each.)Mary Joyce Ariem100% (1)
- Simple Address BookDocument20 pagesSimple Address BookPembangunan GultomNo ratings yet
- Prospektus 2023 Update 14042023Document825 pagesProspektus 2023 Update 14042023MohamedIkhwanNo ratings yet
- Isc Class 12 Comp ProjectDocument65 pagesIsc Class 12 Comp ProjectAkshara JaiswalNo ratings yet
- System Programming and Compiler ConstructionDocument29 pagesSystem Programming and Compiler ConstructionTauros OPNo ratings yet
- 3bse021359r301 PDFDocument173 pages3bse021359r301 PDFOreonnyr SouzaNo ratings yet
- 8-Analysis and Optimization of Energy, Power and Program SizeDocument7 pages8-Analysis and Optimization of Energy, Power and Program SizeUmer AftabNo ratings yet
- MarschallDocument213 pagesMarschallvicente byNo ratings yet
- Time America, Inc. TA520/530: Technical Reference ManualDocument55 pagesTime America, Inc. TA520/530: Technical Reference Manualsujithnair143No ratings yet
- Syllabus Copy of 2 Bcom of SkuDocument4 pagesSyllabus Copy of 2 Bcom of SkuLakshmi LakshminarayanaNo ratings yet
- Sidify Music Converter For Spotify (Windows) User Manual: TutorialsDocument15 pagesSidify Music Converter For Spotify (Windows) User Manual: TutorialsJon P CoNo ratings yet
- Employee Leave Management System Project ReportDocument91 pagesEmployee Leave Management System Project Report007Ãrnav SinghaNo ratings yet
- Python Datastructures Course FileDocument35 pagesPython Datastructures Course FileRenjithNo ratings yet