You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fire Extinguishers SpecificationDocument9 pagesFire Extinguishers Specificationbalaeee123No ratings yet
- Electrical Protection HandbookDocument124 pagesElectrical Protection Handbookgeorgel1980No ratings yet
- 178-The IT Earthing SystemDocument31 pages178-The IT Earthing Systemgeorgel1980No ratings yet
- Engine Lubrication SystemDocument29 pagesEngine Lubrication SystemAnonymous xjV1llZSNo ratings yet
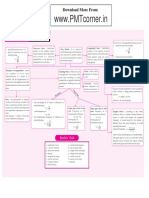
- Waves Brain MapDocument1 pageWaves Brain MapBala MuruganNo ratings yet
- Failure Analysis of Storage TankDocument13 pagesFailure Analysis of Storage TankDavid Rodrigues100% (1)
- Sample Design of TroughDocument18 pagesSample Design of TroughAsela UdayangaNo ratings yet
- T-Retaining Wall Design To AS5100.3 Rev BDocument7 pagesT-Retaining Wall Design To AS5100.3 Rev BKevin FarriesNo ratings yet
- Site Analysis ChecklistDocument5 pagesSite Analysis ChecklistSameera BommisettyNo ratings yet
- Astm D 3612 - 01Document24 pagesAstm D 3612 - 01mtuankctNo ratings yet
- HOLOPHANE Lighting Fundamentals HL 862Document24 pagesHOLOPHANE Lighting Fundamentals HL 862georgel1980No ratings yet
- Component Protection For Electrical SystemsDocument32 pagesComponent Protection For Electrical Systemsgeorgel1980No ratings yet
- D-Fundamentals of Motor ControlDocument60 pagesD-Fundamentals of Motor Controlgeorgel1980No ratings yet
- 191 Fuzzy LogicDocument32 pages191 Fuzzy Logicgeorgel1980No ratings yet
- Parul University: Yn XNDocument2 pagesParul University: Yn XNHarshraj MahidaNo ratings yet
- St7016 Prefabricated Structures L T P c3 0 0 3Document1 pageSt7016 Prefabricated Structures L T P c3 0 0 3Dinesh AJNo ratings yet
- TCC31 One-Way SlabsDocument43 pagesTCC31 One-Way SlabsMuscadin MakensonNo ratings yet
- Introducing Rheology - Sep 2017Document34 pagesIntroducing Rheology - Sep 2017Daniel Perez ColmenaresNo ratings yet
- Controllability, Observability, Pole: AllocationDocument14 pagesControllability, Observability, Pole: AllocationSanchez Resendiz BonifacioNo ratings yet
- 1 Outrigger and Belt Wall SystemDocument24 pages1 Outrigger and Belt Wall SystemBurhan NasutionNo ratings yet
- Complex Numbers in TrigonometryDocument13 pagesComplex Numbers in TrigonometryHimanshu TiwariNo ratings yet
- Use GIMP To Add Realistic Falling Snow To A PhotoDocument8 pagesUse GIMP To Add Realistic Falling Snow To A PhotoxmathNo ratings yet
- BCS 012Document92 pagesBCS 012RishabhNo ratings yet
- Chapter 1. Introduction: 1. Generation of X-RayDocument127 pagesChapter 1. Introduction: 1. Generation of X-Raynirmal_phyNo ratings yet
- Response Table For Analyze Taguchi Design: Learn More About Minitab 18Document11 pagesResponse Table For Analyze Taguchi Design: Learn More About Minitab 18psmonu54No ratings yet
- RESUME Marjan Shameem QTRDocument5 pagesRESUME Marjan Shameem QTRsophist1No ratings yet
- Magnetic Forces On WiresDocument4 pagesMagnetic Forces On WiresasiyahNo ratings yet
- Column Splice (Non Bearing)Document22 pagesColumn Splice (Non Bearing)floi dNo ratings yet
- Nptel Internship Progress Presentation at Iisc Bangalore: Different Methodologies Opted For Site Characterization"Document11 pagesNptel Internship Progress Presentation at Iisc Bangalore: Different Methodologies Opted For Site Characterization"Aditya Kumar AnshuNo ratings yet
- S.5 PURTH Differentiation Rates of Change by Ojera AlexDocument15 pagesS.5 PURTH Differentiation Rates of Change by Ojera AlexPentNo ratings yet
- Three Branches of Fluid MechanicsDocument47 pagesThree Branches of Fluid MechanicsJemuel FloresNo ratings yet
- Kinetics, Rate Equations, RdsDocument10 pagesKinetics, Rate Equations, RdstomNo ratings yet
- Astm D6927 22Document7 pagesAstm D6927 22Okello StevenNo ratings yet
- 2 - Normal StressDocument29 pages2 - Normal StressAya AyaNo ratings yet
- Unconventional Machining Processes - Introduction and ClassificationDocument3 pagesUnconventional Machining Processes - Introduction and ClassificationVishal KumarNo ratings yet
- Sample 7580Document11 pagesSample 7580SagarKasarla0% (1)