You might also like
- 04 - ASiDocument47 pages04 - ASiChucho Cast FNo ratings yet
- Practica 6Document10 pagesPractica 6api-233749685No ratings yet
- Programacion Fup SiemensDocument212 pagesProgramacion Fup SiemensRodrigo GuzmanNo ratings yet
- S7awl DDocument272 pagesS7awl Dapi-233749685No ratings yet
- Practica 4Document12 pagesPractica 4api-233749685No ratings yet
- Practica 1 PDFDocument33 pagesPractica 1 PDFOskarRamirezNo ratings yet
- Ap 5Document3 pagesAp 5api-233749685No ratings yet
- Actividad Previa 4 1Document4 pagesActividad Previa 4 1api-233749685No ratings yet
- Practica 3Document16 pagesPractica 3api-233749685No ratings yet
- Incubadora de EmpresasDocument3 pagesIncubadora de EmpresasAnonymous UF8onKQcztNo ratings yet
- Prueba de Rigidez Dielectrica (Aceite Del Transformador)Document8 pagesPrueba de Rigidez Dielectrica (Aceite Del Transformador)Blas Uriel Castro Miranda100% (7)
- Taller AA3 N Estudion Den CasoDocument19 pagesTaller AA3 N Estudion Den CasoWilliam HuertasNo ratings yet
- Cálculo de Dotación de AguaDocument3 pagesCálculo de Dotación de AguaElvis DenisNo ratings yet
- Ranco Termostatos Presostatos 2019Document9 pagesRanco Termostatos Presostatos 2019Fernando ZentenoNo ratings yet
- Guía Cambio Demografico en Chile Con RespuestasDocument10 pagesGuía Cambio Demografico en Chile Con RespuestasFelipe Benítez GarzónNo ratings yet
- 432 HZ PDFDocument10 pages432 HZ PDFDavidCastelaDominguezNo ratings yet
- Marco Teorico (En Proceso)Document14 pagesMarco Teorico (En Proceso)EmirRodriguezTualaNo ratings yet
- GalvanometroDocument3 pagesGalvanometroleonel montillaNo ratings yet
- Evaluación proyectosDocument8 pagesEvaluación proyectosAndres OkranzaNo ratings yet
- Apuntes DescripGUIAnalyzer GeoMoSv40Document3 pagesApuntes DescripGUIAnalyzer GeoMoSv40jose arenasNo ratings yet
- Tesis Maestría ChambiDocument79 pagesTesis Maestría ChambiJohnny AtencioNo ratings yet
- Imprimir Página - (-BLRP-) Formato para Líder de Facción (-LG-)Document4 pagesImprimir Página - (-BLRP-) Formato para Líder de Facción (-LG-)Argenis LozadaNo ratings yet
- RightKey Comunicador MAIC v1 EspanolDocument2 pagesRightKey Comunicador MAIC v1 EspanolLuis CarlosNo ratings yet
- Cronograma General Negociacion InternacionalDocument4 pagesCronograma General Negociacion InternacionalPeña AndrésNo ratings yet
- Formato Permiso Espacios ConfinadosDocument5 pagesFormato Permiso Espacios ConfinadosDaniel Alturo GomezNo ratings yet
- Mob Ilia Rio y Eqpo. de ComputoDocument90 pagesMob Ilia Rio y Eqpo. de ComputotinguiblueNo ratings yet
- Cinema 4DDocument11 pagesCinema 4DErwing J HernandezNo ratings yet
- Informe 1Document34 pagesInforme 1LeoVelitaEspinozaNo ratings yet
- Retrowiki Magazine 6Document56 pagesRetrowiki Magazine 6Ibiza AlesNo ratings yet
- RACDADocument3 pagesRACDAanon_667953693No ratings yet
- Explosión de festivales folclóricos en GuatemalaDocument5 pagesExplosión de festivales folclóricos en GuatemalaPablo GarciaNo ratings yet
- 03 Designación de RodamientosDocument23 pages03 Designación de RodamientosRicardo Vash Lázaro100% (3)
- Migra 3Document23 pagesMigra 3Dianis SantosNo ratings yet
- Codigos ASMEDocument2 pagesCodigos ASMEDemetrioNo ratings yet
- La importancia de la física en el estudio y protección del medio ambienteDocument6 pagesLa importancia de la física en el estudio y protección del medio ambientepatriciafloresa16No ratings yet
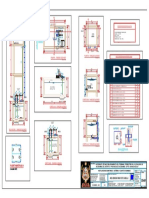
- CB - 01 - Cisterna - Cuarto Bombas 1 (A2)Document1 pageCB - 01 - Cisterna - Cuarto Bombas 1 (A2)Brayan Kel Alejo HinojozaNo ratings yet
- Objetivos de Un SGBDDocument3 pagesObjetivos de Un SGBDMayra Ivonn Berrios RuizNo ratings yet
- Estado de Derecho y Administración PúblicaDocument14 pagesEstado de Derecho y Administración PúblicaCarlos Hernández-CubíasNo ratings yet
- Segmentacion B2BDocument6 pagesSegmentacion B2BLis TorresNo ratings yet