Professional Documents
Culture Documents
Modulo 5 - Diseno de Sistemas Automaticos de Produccion 2
Uploaded by
sefair12100%(1)100% found this document useful (1 vote)
130 views43 pagesOriginal Title
Modulo 5 - Diseno de Sistemas Automaticos de Produccion 2 (1)
Copyright
© © All Rights Reserved
Available Formats
PDF, TXT or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
100%(1)100% found this document useful (1 vote)
130 views43 pagesModulo 5 - Diseno de Sistemas Automaticos de Produccion 2
Uploaded by
sefair12Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
You are on page 1of 43
117
5. DISEO DE SISTEMAS AUTOMTICOS DE PRODUCCIN
5.1 INTRODUCCIN
Luego de haber realizado en el mdulo anterior un estudio tecnolgico de los elementos de
trabajo y de control que constituyen una automatizacin, as como las posibilidades para
interconectarse mediante la realizacin de los diferentes circuitos bsicos, se procede a abordar
en este mdulo a la solucin terico-prctica de cualquier problema de automatizacin de un
sistema de produccin especfico.
Primeramente se considera fundamental analizar como mucho cuidado y con criterios
cientficos el problema de automatizacin que se nos presente, con el fin de seleccionar la
tecnologa ms adecuada, que nos suministre por lo tanto, una solucin ptima tanto en el
aspecto tcnico como en el econmico, tal como se expreso en el numeral 1.9 del mdulo 1.
Por lo tanto, en este capitulo se estudia la metodologa a seguir para el diseo de una
automatizacin usando las diferentes tecnologas existentes, como son: la neumtica,
hidrulica, electroneumtica, electrohidrulica y controlados electrnicamente con un PLC. Ya
que consideramos que para obtener la solucin ptima de un problema planteado, es
primordial y bsico el conocimiento de todas las alternativas que se ofrecen.
5.2 DISEO DE CIRCUITOS NEUMTICOS
El uso cada da ms frecuente de elementos accionados neumticamente en todo tipo de
industria coloca al proyectista o diseador de los circuitos frente a problemas complejos y por
tanto difciles de resolver.
Durante muchos aos los diseadores han recurrido exclusivamente a su imaginacin a los
efectos de lograr circuitos con alta fiabilidad y buenas condiciones operativas basadas en el
anlisis paso a paso de las operaciones y su propia experiencia.
Tal mtodo resulta prcticamente inaplicable para circuitos de alta complejidad, sobre todo
cuando no se tiene una vasta experiencia en tal tcnica. En tales casos convendr valerse de
principios de un orden superior y utilizar mtodos sistemticos.
A continuacin se realizar un anlisis comparativo entre los diferentes mtodos empleados en
neumtica, as como su evolucin y las principales caractersticas tcnicas que los distinguen.
Adems la forma de representar grficamente un circuito neumtico.
Los mtodos para el diseo de circuitos neumticos, pueden dividirse en: Intitutivos,
Analticos y Sistemticos.
Mtodos Intuitivos.
Realizados sin mtodo propiamente dicho, basndose nicamente en la experiencia del
diseador. Se busca la optimizacin en los elementos. Difcil de comprender por otras
personas. Se complementa con un conocimiento tecnolgico de los elementos, e incluso no
118
es siempre realizable con elementos de otros proveedores. Es el mtodo que demuestra
mejor la aptitud creativa de un proyectista. Muy apto para circuitos sencillos o que no
deban diagnosticarse.
Mtodos Analticos.
Buscan la independencia tecnolgica, por medio de frmulas lgicas que establecen las
funciones bsicas que rigen el funcionamiento interno de un automatismo, ya sea
electromecnico, electrnico, neumtico o fluidico. Se acude a una simbologa propia que
puede aportar confusin. Aptos para automatizaciones muy complejas y de gran nivel de
integracin, pero de escasa incidencia en la neumtica de hoy da. Sus precedentes ms
importantes son Karnaugh-Boole y mtodo combinacional.
Mtodos Sistemticos.
Mtodos orientados por completo a la tecnologa neumtica y al utilizador final, para
unificar la sistemtica del diseador y el utilizador, facilitando as el diagnostico en caso
de detenciones o averas. Fcil diseo desde un diagrama de flujo o Grafcet. Acostumbra a
haber indicacin del estado o fase.
El mando es elaborado siguiendo el mismo principio, por medio de consignas y
recomendaciones establecidas, y a pesar de apreciaciones personales el sistema es el
mismo para los encargados de la realizacin y puesta en marcha.
No es de extraar que este tipo de mando tenga un precio ms elevado que el desarrollado
por el mtodo intuitivo, sin embargo este encarecimiento es amortizado muy rpidamente
por la ganancia que se desprende durante el proyecto y el mantenimiento.
El diseo de circuitos neumticos mediante mtodos sistemticos permite que a travs del
enunciado de las funciones que deben realizar los actuadores neumticos lineales o
rotativos del circuito, establecer la cantidad de elementos que van a intervenir en el mismo,
predeterminar su costo y tener la seguridad de obtener un mando fiable.
Debemos hacer notar algo muy importante: sea cual fuere el mtodo y la tcnica
empleada es primordial y bsico el conocimiento de la tecnologa y las posibilidades del
material a utilizar.
En el diseo de circuitos por mtodos sistemticos slo adoptaremos aquellas secuencias
dependientes del recorrido, establecidos por finales de carrera.
Los mtodos sistemticos utilizados para el diseo de circuitos neumticos se fundamentan
en las posibilidades que se ofrecen para la anulacin de seales permanentes. Es decir, dos
seales de pilotaje opuestas aplicadas a una vlvula de funcin memoria y que coinciden
durante cierto tiempo, de tal forma que la contraseal, supongamos que debe mandar a la
memoria a su posicin inicial, no produce ningn efecto porque an permanece la seal
que ha mandado el cambio de esta, debido a que el captador de informacin que nos la da,
todava est bajo el efecto de una accin.
Al respecto se puede mencionar que el camino ms sencillo y rpido para la construccin
de cualquier mando seguro, consiste en desconectar la seal cuando esta ya no se necesite,
119
lo que significa la anulacin despus de cada paso u operacin. Por ejemplo, cuando se
trate de realizar cuatro anulaciones, se puede representar como muestra la Figura 42.
Figura 42. Bloque para la anulacin de cuatro seales.
Esta unidad debe solucionar el problema de las seales permanentes, y ha de cumplir las
exigencias determinadas, a saber:
Nmero de seales de entrada = nmero de seales de salida.
A cada seal de entrada le corresponde una seal de salida.
Las seales de salida han de memorizarse, es decir, deben permanecer aunque haya
desaparecido la seal de entrada correspondiente.
Slo puede estar presente una nica seal de salida, y debe existir la posibilidad de
desconectar estas seales de salida de forma controlada.
Las seales de entrada deben tener efecto solo si siguen el orden preestablecido, 1-2-3-
4-1-...
La caja negra representada anteriormente puede tener varias versiones dependiendo
del tipo de tecnologa a emplear (neumtica, elctrica o electrnica).
De lo expuesto en el ltimo punto anterior, se concluye que las seales permanentes que se
presentan en las automatizaciones se pueden eliminar por tratamiento de las mismas con
diferentes tecnologas: neumtica, elctrica o electrnica, tal como se describe a
continuacin.
Tecnologa neumtica: en este caso es posible realizarlo por medios mecnicos o por
la tcnica de los circuitos.
Anulacin mecnica de seales: mediante finales de carrera con rodillo abatible.
Anulacin de seales segn la tcnica de los circuitos: con temporizadores de
retardo a la desconexin y mediante memorias (vlvulas de impulsos) montadas en
serie (cascada) o en paralelo (paso a paso o registro de desplazamiento).
Tecnologa elctrica: mediante la tcnica de rels montados en cascada (cadena
mnima) o en paso a paso (cadena mxima).
120
Tecnologa electrnica: mediante la tcnica digital o el procesador electrnico
programable o controlador lgico programable (PLC).
En este numeral trataremos el diseo de circuitos de control con tecnologa neumtica. En los
numerales posteriores se analizar el diseo del circuito de control con tecnologas elctrica y
electrnica.
5.2.1 Diseo de circuitos neumticos con vlvulas de rodillo abatible
Aqu primeramente se realiza el circuito neumtico sin considerar las seales que deban
eliminarse. A continuacin se desarrolla el diagrama funcional (espacio fase y de mando)
para verificar que seales deben eliminarse a travs del final de carrera de rodillo abatible.
El diagrama espacio fase permite ver los cambios de estado de los diferentes elementos de
trabajo y se construye representando en la ordenada la carrera del cilindro y en la abscisa las
secuencias o fases del problema.
En el diagrama de mando se registran correspondiendo con las fases los estados de conexin
de los elementos emisores de seales. Aqu los tiempos de conexin no se tienen en cuenta,
solamente es importante el estado abierto y cerrado de cualquier emisor de seal. Para su
realizacin debe analizarse las parejas de emisores de seales que actan sobre la memoria de
cada cilindro y en caso de que exista coincidencia de seales, debe eliminarse la mayor.
Este diseo es aplicable a automatizaciones sencillas en las cuales no son determinantes las
velocidades de trabajo y el utilizar la totalidad de la carrera del cilindro, ya que el cilindro
debe pasar lentamente sobre el final de carrera de rodillo abatible para dar el tiempo suficiente
para la emisin de seal y luego continuar hacia los extremos de su carrera.
5.2.2 Diseo de circuitos neumticos con montaje en cascada
En esta modalidad se utilizan vlvulas memorias 4/2 o 5/2 vas conectadas de forma
escalonada (montaje en cascada), de tal forma que despus de cada seal de pilotaje que
demos en el mdulo de mando slo tenemos salida en un solo grupo discriminatorio. Otra
caracterstica es la relacin unvoca entre las seales de entrada e y las de salida s, en el orden
1... n al desarrollarse el mando.
En la figura 43 se aprecian las memorias instaladas en la disposicin de cascada para dos, tres
y cuatro grupos.
121
Figura 43. Montaje en cascada para dos, tres y cuatro grupos
Hay que tener en cuenta, que una seal de duracin prolongada no puede trastornar el sistema.
Para evitarlo es necesario someter las seales de entrada a la realizacin del paso anterior. La
seal e
n
solo ser efectiva cuando tengamos seal de salida por s
n-1
.
Esta seguridad (proteccin) puede obtenerse con la tcnica de los circuitos mediante la vlvula
de simultaneidad recibiendo seal a ambos lados de e
n
y s
n-1
; tambin mediante la conexin
en serie de la salida s
n-1
y el captador de informacin que debe emitir la seal e
n
. Esta ltima
ejecucin puede realizarse cuando las conducciones entre los captadores de informacin y el
mdulo de mando no son demasiados largas, o bien, si el captador de informacin no se utiliza
para la realizacin de otro proceso.
En el montaje en cascada las memorias quedan conectadas en serie, observndose lo siguiente:
La primera vlvula de la serie emite dos seales de salida s
1
y s
2
, las restantes una sola
seal de salida.
La vlvula que sigue en la serie invierte respectivamente la anterior.
La ltima vlvula de la serie recibe dos seales de entrada, y se monta en posicin
invertida con respecto a las otras con la finalidad de tener siempre una posicin bsica
uniforme y una salida inicial preferente.
La alimentacin de energa se realiza a travs de una nica conexin. El aire ha de pasar a
travs de todas las vlvulas antes de conectar una seal de mando. La cada de presin
puede llegar a ser considerable y por consiguiente el proceso carece de rapidez en unos
momentos determinados. Por tanto no se debe montar en cascada ms de tres memorias.
En caso de necesitar ms memorias por exigencias del mando, recomendamos el sistema
paso a paso.
Ejemplo: resolver por el mtodo cascada la automatizacin de un dispositivo para doblar
que presenta la siguiente secuencia:
122
A+
B+
B- C+ C- A-, donde se indican con el signo + la salida del vstago y con la
entrada del vstago.
Solucin:
1. Escritura abreviada y divisin de la secuencia en grupos:
La divisin de la secuencia en grupos debe realizarse en tal forma que un cilindro no
intervenga ms de una vez en un grupo.
2. Nmero de grupos = Nmero de lneas de salida
Nmero de memorias = Nmero de grupos 1
3. Se dibujan los elementos de trabajo con sus correspondientes rganos de mando y el
montaje en cascada respectivo haciendo corresponder las entradas y las salidas.
4. Se procede al conexionado del circuito. En caso de existir condiciones adicionales se
tendrn en cuenta solo cuando se haya realizado el desarrollo de los movimientos bsicos.
5.2.3 Diseo de circuitos neumticos con montaje en paso a paso (registros de
desplazamiento)
Al contrario en cascada en este caso se utilizan vlvulas memorias 3/2, no dispuestas en serie
sino conectadas en paralelo, una al lado de la otra. Quedando en esta forma conectadas
independientemente, tanto en la alimentacin como en la distribucin, eliminando por
completo toda posibilidad de cada de presin en los sistemas ms complejos.
Cada paso est constituido por una memoria 3/2 y un mdulo Y.
El conexionado para un sistema paso a paso para cuatro fases se muestra en la Figura 44 y a
continuacin se describe su funcionamiento.
123
Figura 44. Conexionado para un sistema paso a paso cudruple
En la posicin de partida estn borradas todas las memorias de la cadena rtmica, con
excepcin de la ltima memoria. Esta debe estar activada en la posicin de partida, para
facilitar el arranque del programa a travs de l.
Cuando existe seal en e
1
y s
4
del primer elemento, se obtendr una seal de salida s
1
en la
memoria 1 que prepara al segundo elemento y borra el paso anterior (el cuarto mdulo).
Al disponer de seal de entrada en e
2
como confirmacin de la realizacin de un movimiento
ordenado por la salida s
1
, entra en accin el segundo mdulo dando la seal de salida s
2
que
tiene tres misiones:
1. Preparar el siguiente paso (tercer elemento Y)
2. Borrar el paso anterior
3. Dar una orden de trabajo.
Cada uno de los mdulos que compone el sistema realiza esta triple misin.
Para hacer posible un reset del sistema paso a paso, es necesario accionar un mdulo O en
la conexin respectiva de pilotaje de las memorias, excepto la ltima, la cual lleva el mdulo
O en la conexin activar.
La orden reset es necesaria cuando ha surgido un error en el ciclo y queda bloqueado por
ello el mando, o cuando por otros motivos ha de ponerse en posicin inicial de partida un
sistema paso a paso, por ejemplo, paro de emergencia.
Por tanto, cada paso se compone de: una memoria 3/2, un mdulo Y y un mdulo O, tal como
se muestra en la Figura 45.
Para reducir el esfuerzo de proyecto y de instalacin de los mandos secuenciales de este tipo,
en la tcnica neumtica se desarrollaron mdulos en los que se integraron los tres elementos
funcionales citados. Estos bloques integrados reciben el nombre de mdulos paso a paso o
124
registros de desplazamiento, y son ofrecidos por muchos fabricantes de equipos neumticos
para la solucin de amplias tareas de automatizacin de tipo secuencial, pudindose unir
cualquier nmero de estos mdulos, formando una cadena de pasos.
Figura 45. Conexionado para un sistema paso a paso con reset
5.3 DISEO DE CIRCUITOS OLEOHIDRULICOS
Aqu a diferencia de la neumtica no existe una lgica bien especificada para disear estos
circuitos. Sin embargo, dado que los accionadores son cilindros o motores hidrulicos, existen
las siguientes posibilidades para el diseo del circuito de control:
Mandos monoenergticos, mediante el cual el control es confeccionado con las vlvulas de
secuencia (ver numeral 4.3.4.3).
Mandos hbridos, en los cuales el control es diseado con elementos elctricos (tcnica de
rels) o con elementos electrnicos (especialmente con el controlador lgico programable:
PLC).
5.4 DISEO DE CIRCUITOS ELECTRO NEUMTICOS / HIDRULICOS
Al aplicar en la prctica circuitos electroneumticos y electrohidrulicos es preciso el empleo
de sistemas convertidores, que tienen la funcin de convertir seales elctricas en seales
neumticas o hidrulicas.
En este numeral se presentaran los elementos para la entrada, el procesamiento y la conversin
de seales, as como las bases para la representacin grfica de circuitos electroneumticos y
electrohidrulicos y el diseo de los circuitos elctricos de control.
5.4.1 Elementos elctricos para la entrada de seales
Son todos aquellos elementos que actan accionados por el operario o por otros factores como
son temperatura, presin, accin mecnica, entre otros.
125
5.4.1.1 Pulsadores
Estos elementos al accionarlos ocupan una posicin de contacto y solamente mientras existe el
accionamiento del mismo, al soltarlo retornan a la posicin inicial. Por su apariencia y forma
exterior pueden ser:
Rasantes: que impiden maniobras involuntarias.
Salientes: de accionamiento ms cmodo. Son los ms usados.
De llave: para accionamientos de gran responsabilidad.
De seta: para accionamientos en situaciones de emergencias.
Luminosos: con sealizacin incorporada.
5.4.1.2 Selectores o interruptores
Este aparato al accionarlo ocupa una posicin de conexin determinada (queda enclavado
mecnicamente), al volverlo accionar regresa el interruptor a la posicin inicial. Se encuentran
en variedad de formas: simples, de llave, etc.
Tanto los Pulsadores como los Interruptores se clasifican de acuerdo a la funcin que realizan,
as:
Normalmente cerrado (NC): para abrir o cerrar un circuito.
Normalmente abierto (NO): para cerrar circuitos.
De desconexin mltiple: para abrir varios circuitos independientes.
De conexin mltiple: para cerrar varios circuitos independientes.
De conexin desconexin: para abrir un circuito y cerrar otro al mismo tiempo.
De conexin desconexin mltiple: para abrir y cerrar varios circuitos
contemporneamente.
5.4.1.3 Finales de carrera mecnicos
Son aparatos destinados a controlar la posicin de piezas de mquinas u otros elementos.
En cuanto a los contactos tienen uno cerrado u uno abierto y se comportan como los de un
pulsador de conexin desconexin.
5.4.1.4 Finales de carrera sin contacto
Son dispositivos empleados para el control de presencia, ausencia, fin de recorrido, etc., sin
necesidad de entrar en contacto directo con las piezas.
Se emplean cuando las velocidades de ataque y funcionamiento son levadas, el entorno
exterior de las piezas es severo, existe presencia de polvos, aceite de corte, agentes qumicos,
humedad, vibracin, choque, etc., o cuando las piezas son pequeas o frgiles.
126
Estas caractersticas hacen que su uso sea muy til en mquinas de ensamble, mquinas
herramientas, mquinas transportadoras, prensas, etc.
Existen las siguientes versiones:
Detectores de proximidad inductivos: se usan para objetos metlicos.
Detectores de proximidad capacitivos: se usan para objetos de cualquier naturaleza.
Interruptores de proximidad magnticos incorporados sobre el cilindro: usados para la
deteccin de la posicin sin contacto, los cuales actan sobre un imn permanente que
lleva incorporado el mbolo de un cilindro de construccin especial (ver numeral 4.2.3).
Se usan especialmente cuando no existe sitio para el montaje de los clsicos finales de
carrera o en presencia de determinadas condiciones ambientales como polvo, humedad,
arena.
5.4.1.5 Presostatos
Son aparatos que accionan circuitos elctricos, al transformar cambios de presin de
instalaciones neumticas o hidrulicas, en seales elctricas.
5.4.1.6 Termostatos
Son aparatos que abren o cierran circuitos en funcin de la temperatura que los rodea.
5.4.2 Elementos elctricos para el procesamiento de seales
5.4.2.1 Rels
Es un dispositivo operado electromagnticamente que abre y cierra circuitos elctricos
mediante contactos que lleva incorporado. Se utilizan para operaciones de control o regulacin
en mquinas e instalaciones industriales. Puede manejar cargas de potencia de bajo voltaje y
corriente (mximo 5 Amperios), mientras que un contactor est diseado para el arranque de
motores y cargas de alto amperaje.
Se componen fundamentalmente de las siguientes partes: carcaza, bobina, ncleo, armadura y
contactos.
Su funcionamiento es el siguiente: cuando la bobina es recorrida por la corriente elctrica,
genera un campo magntico que hace que el ncleo atraiga la armadura (parte mvil), de
manera que al realizarse este movimiento, se cierran contemporneamente todos los contactos
abiertos y se abren los cerrados. Para volver los contactos a su estado inicial basta
desenergizar la bobina.
La Figura 46 muestra la representacin simblica de un rel con dos contactos normalmente
cerrados y dos normalmente abiertos. El rel recibe la designacin K y las conexiones de la
bobina A
1
y A
2
. La primera cifra de los contactos es una numeracin continua y la segunda
cifra indica lo siguiente: 1 2 para contactos cerrados y 3 4 para contactos abiertos.
127
Figura 46. Rel con 4 contactos: 2NO y 2 NC. (Deltrol Controls, USA)
5.4.2.2 Rels de tiempo o temporizadores
Son aparatos que cierran o abren determinados contactos al cabo de un tiempo, debidamente
establecido, de haberse abierto o cerrado su circuito de alimentacin. Existen dos tipos de
temporizadores:
1. Temporizador a la conexin (al trabajo): si sus contactos temporizados actan despus de
cierto tiempo de haber sido energizado.
2. Temporizador a la desconexin (al reposo): sus contactos temporizados actuarn
solamente despus de cierto tiempo de que el temporizador haya sido desenergizado.
5.4.3 Convertidores de seales
Para convertir las seales elctricas en seales neumticas o hidrulicas, se utilizan las
vlvulas electromagnticas (electrovlvulas).
Las electrovlvulas constan de una vlvula de vas y un cabezal de mando elctrico (bobina o
solenoide), y son bsicamente una vlvula distribuidora con accionamiento elctrico / resorte,
o accionamiento elctrico por ambos lados. Para su eleccin es necesario indicar el voltaje de
la bobina adems del calibre de la vlvula.
El presostato se considera como un elemento convertidor ya que se utiliza para convertir
seales de presin neumticas a seales elctricas.
5.4.4 Representacin grfica de los circuitos electroneumticos / electrohidrulicos
Para la representacin grfica de estos circuitos se har uso del esquema sistemtico o
funcional, subdividindolo en circuito principal (o de potencia) y circuito de control.
128
El circuito principal o de potencia est constituido por los cilindros con sus
correspondientes electrovlvulas.
El circuito de control est constituido por dos lneas horizontales (sistema europeo) que
representan la alimentacin general del circuito, y una serie de lneas verticales
equidistantes y conectadas a aquellas, que corresponden a los diferentes circuitos del
esquema, en los cuales se van ubicando los diferentes elementos de acuerdo a la funcin
que deben realizar. Tambin es posible dibujar las lneas de alimentacin verticales
(sistema americano: sistema ladder), en cuyo caso las dems lneas sern horizontales.
En los circuitos los elementos se identifican as:
Los pulsadores, interruptores, selectores y finales de carrera reciben la letra S y un nmero
de orden 1,2,3,...
El rel recibe la letra K y un nmero de orden 1, 2, 3,...
Los contactos del rel se designan con dos nmeros, el primero es un nmero de orden y el
segundo ser 1,2 para contactos NC y 3,4 para contactos NO.
Las bobinas de las electrovlvulas se designan con la letra Y y un nmero de orden 1, 2,
3,...
5.4.5 Diseo del circuito elctrico de control
Para el diseo de los circuitos elctricos de control nos apoyaremos en lo estudiado para el
diseo de circuitos neumticos, aplicando la misma sistemtica pero utilizando los rels, en
lugar de memorias, para la eliminacin de las seales.
El montaje de los rels se realizar en serie o en paralelo, tal como se hizo con las memorias y
utilizando la misma lgica, con lo que resultan los circuitos:
1. Cascada elctrico: cadena mnima
2. Paso a paso elctrico: cadena mxima.
129
5.5 DISEO DE CIRCUITOS CON PLC
5.5.1 Generalidades sobre el Controlador Lgico Programable (PLC)
Se puede definir el PLC, como una mquina electrnica programable por personal no
informtico, diseada para la solucin de automatismos lgicos que se presentan en los
sistemas automticos de produccin.
Se puede pensar en un PLC como un pequeo computador industrial que ha sido altamente
especializado para prestar la mxima confianza y mximo rendimiento en un ambiente
industrial. En su esencia, un PLC mira sensores digitales y analgicos y switches (entradas),
lee su programa de control, hace clculos matemticos y como resultado controla diferentes
tipos de hardware (salidas) tales como vlvulas, luces, rels, servomotores, etc. en un marco
de tiempo de milisegundos.
Los controles lgicos programables (PLC), se utilizan principalmente para las siguientes
funciones:
Control de proceso secuenciales
Control de variables de un proceso, como son, temperaturas, presiones, niveles
Interfase entre la mquina herramienta y el control numrico computarizado (CNC),
Figura 47. Estructura de un PLC. (Wikipedia La Enciclopedia Libre)
Para la seleccin de un PLC, se deben considerar los siguientes aspectos:
Ficha de identidad: marca/ modelo/ tipo; fabricante/ representante; ao de aparicin en el
mercado; disponibilidad de documentacin tcnica: manual de servicio y de operaciones.
Tecnologa empleada en el equipo: tipo y tamao de memoria; tamao de palabras que
maneje el equipo: bit; naturaleza de los circuitos: tcnica MOS, CMOS, TTL; estructura
130
general; alimentacin y el consumo; condiciones ambientales; presentacin: compacta y
modular (expandible); tamao y tipos de interfaces.
rganos de comunicacin externa: tipos I/O: digitales, anlogas, especiales; tipos de
perifricos que maneja: impresoras, unidad de disco, cinta magntica, plotters; Fax /
teletipo; grabadora; display.
Lenguaje de programacin: diagrama de contactos (diagrama ladder); diagrama de
funciones (Booleano, Grafcet); listado de instrucciones.
Soporte lgico: # de rels internos; # de rels especiales; s los rels tienen retencin o no;
# de temporizadores; # de contadores; # de registros; # de secuenciadores; # de
comparadores; funcin aritmtica; manejo de texto; etc.
Medio de dialogo con el operario: teclado con monitor o programador. Necesitamos
considerar los siguientes puntos: escritura; lectura; borrado: insercin; chequeo de estado:
status o monitoreo, verificacin: generando cdigos de error, forzado de entradas y salidas,
seguridad del equipo.
Consideraciones econmicas: precio del equipo; costo de la instalacin; costo de
capacitacin; costo de mantenimiento; flexibilidad para futuras ampliaciones.
5.5.2 Comparacin entre lgica cableada y lgica programada
En los sistemas de mando vistos anteriormente los diferentes elementos, por ejemplo:
vlvulas, rels, contactos, etc., se interconectan usando cables. El tipo de unin, serie o
paralelo, determina la funcin que debe ejecutar el automatismo.
En el caso de la funcin de autoretencin, realizada en un control elctrico mediante un
contacto en paralelo, se materializa en un autmata por medio del programa. Las
interconexiones a travs de los cables se convierten en funciones, por ejemplo, funciones
Y o O cuando se programa con esquema de funciones, y conexiones en serie o paralelo
cuando se programa con esquema de contactos. El aparato de programacin convierte las
funciones programadas en instrucciones y las escribe en forma de programa sobre un disquete
o un mdulo de memoria. Este ltimo se inserta en el autmata programable. El procesador lee
y ejecuta sucesivamente las instrucciones contenidas en el mdulo de memoria.
Cuando se utilizan autmatas programables el cableado se limita a conectar los elementos de
mando o los finales de carrera a las entradas de las tarjetas de entrada del autmata. A las
tarjetas de salida se les conectan bobinas de electrovlvulas y lmparas de sealizacin.
En el programa o en el procesador se implementan normalmente contactores o rels auxiliares
y temporizadores. Esto implica un ahorro de costos como de espacio. Y si se quiere modificar
la funcin ya no es necesario cambiar el cableado, basta con modificar el programa utilizando
el aparato de programacin.
5.5.3 El software para un PLC
Primero es necesario plantear la tarea, esto se hace normalmente auxilindose de una
descripcin escrita o representndolo en un diagrama espacio/fase o espacio/tiempo, un
131
esquema secuencial o un esquema de funciones. Esta descripcin debe entenderla tanto el
diseador de la mquina como el diseador del sistema de mando.
El diseador del sistema de mando debe transformar entonces la tarea planteada en un
programa de mando contando para ello con los lenguajes de programacin.
El lenguaje de programacin es el medio de entendimiento entre el usuario y el sistema de
automatizacin. Es el lenguaje que emplea el usuario para formular sus tareas de mando. Los
lenguajes de programacin ms frecuentes son los diagramas de contactos, el diagrama
funcional y la lista de instrucciones. Cada uno de estos sistemas lleva impreso en el teclado del
aparato programador los smbolos e instrucciones correspondientes.
El diagrama de contactos, se basa en los esquemas de circuitos utilizados en electrotecnia.
Tambin se le conoce como ladder diagram y consta de dos lneas verticales, la primera
puesta a una fuente de tensin y al otra puesta a tierra. Entre este par de lneas se trazan los
circuitos de contactos en forma de conexiones en serie y en paralelo. El dispositivo
programador consta de un teclado con los smbolos impresos del diagrama de contactos,
as:
-] [-: contacto abierto, -]/[-: contacto cerrado, -( )-: salida.
Este lenguaje de programacin facilita el trabajo a los usuarios habituados a disear
sistemas de mando con la tcnica de rels.
El diagrama funcional, representa la tarea de mando utilizando smbolos lgicos
(Booleanos) o diagrama de flujo (Grafcet). Esta es la forma de representacin que
prefieren los que utilizan los esquemas de bloques de la electrnica digital.
La lista de instrucciones, se compone de diferentes instrucciones, cada una de las cuales
representa una orden para el procesador autmata. Aqu se describe literalmente el
programa, y las diferentes instrucciones estn compuestas de abreviaturas mnemotcnicas
que identifican la funcin a ejecutar. Esta es la forma de representacin con la que trabajan
ms a gusto los usuarios familiarizados con la programacin de computadoras.
132
5.6 SISTEMATICA EN EL TRATAMIENTO DE UN PROBLEMA DE
AUTOMATIZACIN
A travs de un problema ejemplo se explicar la metodologa a seguir en el tratamiento de un
problema de automatizacin industrial. El problema se ha resuelto empleando todas las
tecnologas posibles para la automatizacin de un proceso de manufactura, con el fin de que la
reflexin lgica que se haga permita seleccionar la ms adecuada, o sea, aquella que ofrezca la
mejor solucin segn puntos de vista tcnicos y econmicos.
Problema ejemplo: Automatizacin del proceso de marcado de piezas
1) Presentacin del problema:
Se trata del estudio de la automatizacin del proceso de marcado de piezas, con las
caractersticas siguientes:
Dimensiones: 100 mm x 80 mm x 60 mm
Material: aleacin de aluminio
Nmero de piezas: 1000 piezas/diarias
Peso del punzn de marcado: 70 N
Longitud de carrera: 200 a 300 mm mximo
Caractersticas de la automatizacin:
El ciclo debe iniciarse al accionar el pulsador de MARCHA.
Debe existir la posibilidad de desarrollar el proceso de marcado
AUTOMATICAMENTE, hasta que se agoten las piezas del depsito.
Un final de carrera debe detectar la existencia de piezas en el depsito, y parar el
proceso en su posicin inicial cuando estas se acaben, quedando bloqueado contra una
nueva puesta en marcha.
Al accionar el pulsador STOP, el proceso debe finalizar de inmediato y los cilindros y
el sistema de control deben retornar a su posicin inicial.
Al accionar el pulsador RESET, para los bloques modulares paso a paso que lo poseen,
el sistema de control y los cilindros debe volver a su posicin inicial.
Conceptos previos para desarrollar la Tarea:
Antes de desarrollar los diferentes puntos especificados en la Tarea es necesario revisar los
contenidos que se mencionan a continuacin.
Criterios para la eleccin del tipo de tecnologa a usar en un sistema automtico de
produccin (numeral 1.9)
Instrucciones para la realizacin de circuitos (numeral 4.4)
Diseo de circuitos neumticos con vlvulas de rodillo abatible (numeral 5.2.1)
Diseo de circuitos neumticos con montaje en cascada (numeral 5.2.2)
133
Diseo de circuitos neumticos con montaje en paso a paso (numeral 5.2.3)
Diseo de circuitos electro-neumticos/hidrulicos (numeral 5.4)
Diseo de circuitos con PLC (numeral 5.5)
2) Tareas:
2.1 ) Determinar las secuencias de trabajo
2.2 ) Seleccionar la tecnologa a emplear para los elementos de trabajo y de control
2.3 ) Dimensionar los elementos de trabajo
2.4 ) Establecer el plano de situacin
2.5 ) Establecer el diagrama de funcionamiento
2.6 ) Disear el circuito con vlvulas de rodillo abatible
2.7 ) Disear el circuito con montaje en cascada
2.8 ) Disear el circuito con montaje en paso a paso mnimo
2.9 ) Disear el circuito con montaje en paso a paso mximo
2.10) Disear el circuito con montaje en cascada elctrico (cadena mnima)
2.11) Disear el circuito con montaje en paso a paso elctrico (cadena mxima)
2.12) Disear el circuito con el PLC
2.1) Determinar las secuencias de trabajo:
1) Almacenar las piezas (depsito de carga de cada por gravedad)
2) Extraer las piezas (empujar
3) Mantener las piezas (sujetar)
4) Trabajar las piezas (marcar)
5) Evacuar las piezas (expulsar)
Secuencias Cilindro A Cilindro B Cilindro C
1 Alimentar / Sujetar
2 Marcar
3 Retroceder
4 Soltar
5 Expulsar
6 Retornar
2.2) Seleccionar la tecnologa a emplear para los elementos de trabajo y de control:
Dadas las caractersticas de esta automatizacin: fuerzas pequeas (se trabaja en piezas de
aluminio), carreras de trabajo pequeas, poca distancia entre el equipo y el dispositivo de
control, y una alta produccin (1000 piezas / da) se elegir tanto para la parte de trabajo como
para la de control tecnologa neumtica.
Sin embargo, tal como se coment en la introduccin de este mdulo es necesario hacer una
reflexin ms a fondo y con criterios cientficos, para seleccionar la tecnologa que este ms
de acuerdo con las exigencias de la automatizacin. Por consiguiente, y persiguiendo un
134
objetivo acadmico de informacin y formacin, se presentan soluciones de este problema
empleando las otras tecnologas disponibles.
2.3) Dimensionar los elementos de trabajo:
Todas las fases de trabajo a realizar pueden ser asumidas por elementos neumticos con
movimiento lineal, a saber:
Cilindro A (1.0): Alimentacin
Cilindro B (2.0): Sujecin
Cilindro B (2.0): Marcado
Cilindro C (3.0): Expulsin
Si se colocan los cilindros de manera adecuada es posible realizar las operaciones de
alimentacin y sujecin con el mismo cilindro.
El mtodo para el dimensionado de los elementos de trabajo se supone conocido.
Las fuerzas y carrera son suficientes para el accionamiento de finales de carrera.
Para garantizar la fiabilidad y velocidades de trabajo exigidas se emplearn 3 cilindros de
doble efecto.
Seleccin del cilindro de marcado (2.0):
Su seleccin se har considerando la fuerza total a suministrar para efectuar la operacin de
marcado, las caractersticas del material a marcar y las de la misma marca.
Fuerza necesaria para el marcado: F = Fuerza del punzn + Peso del punzn
F
punzn
= (Superficie de marcado) x (Resistencia admisible del material a marcar) = A
x
adm
Se asume un tamao aproximado de las letras de marcado = 5 mm y una penetracin
aproximada de las letras de 0.5 mm. Por tanto,
A = (lnea de marca)x(profundidad de marca) = (2..5)x(0.5) = 15.71 mm
2
Resistencia admisible a la Tensin / Compresin del Aluminio:
adm
= 1100 N/mm
2
=
1100 Kgf/cm
2
F
punzn
= A x
adm
= (0.157 cm
2
) x (1100 Kgf/cm
2
) = 1730 N
W
punzn
= 70 N, aproximadamente
Fuerza total: F = 1730 + 70 = 1800 N = 180 Kgf
135
Para una F = 1800 N y una p = 6 bar, se selecciona del Catlogo suministrado por los
fabricantes un cilindro de doble efecto de Dimetro = 63 mm (2.1/2 plg) y Carrera = 200
mm.
Seleccin del cilindro de sujeccin (1.0):
Dada las caractersticas del trabajo de alimentacin / sujeccin se selecciona un cilindro
igual al de marcado, as: Dimetro = 63 mm (2.1/2 plg) y una Carrera = 250 mm.
Seleccin del cilindro de expulsin (3.0):
Este cilindro debe suministrar la fuerza necesaria para expulsar la pieza cuyo peso se
determina as:
W
pieza
= . V = (0.0028 Kgf/cm
3
) x (10x8x6) = 1,344 Kgf = 13,4 N
Se selecciona del catlogo del fabricante un cilindro de doble efecto, con Dimetro =
12 mm (1/2 plg ) y una Carrera = 300 mm.
2.4) Establecer el plano de situacin:
Es siempre recomendable trazar, aunque sea de manera muy esquematizada, la colocacin
relativa de los diferentes rganos motrices, ayudar comprender mejor la accin conjunta de
los elementos y el funcionamiento del mando, podr al mismo tiempo, servir como dato
bsico para posibles reuniones tcnicas, o simplemente como recordatorio al tratar
nuevamente el asunto.
Figura 48. Plano de situacin del problema ejemplo. (Festo Didactic GmbH & Co. KG, Alemania)
136
2.5) Establecer el diagrama de funcionamiento:
En esta parte se desarrolla el diagrama funcional (espacio fase y de mando) para verificar
que seales deben eliminarse a travs del final de carrera de rodillo abatible.
El diagrama espacio fase permite ver los cambios de estado de los diferentes elementos de
trabajo y se construye representando en la ordenada la carrera del cilindro y en la abscisa las
secuencias o fases del problema.
En el diagrama de mando se registran correspondiendo con las fases los estados de conexin
de los elementos emisores de seales. Aqu los tiempos de conexin no se tienen en cuenta,
solamente es importante el estado abierto y cerrado de cualquier emisor de seal. Para su
realizacin debe analizarse las parejas de emisores de seales que actan sobre la memoria de
cada cilindro y en caso de que exista coincidencia de seales, debe eliminarse la mayor.
Figura 49. Diagrama de funcionamiento del problema ejemplo
137
2.6) Disear el circuito con vlvulas de rodillo abatible.
El diagrama funcional permite verificar que seales deben ser eliminadas. Se
observa que hay interferencia entre Start + c
0
y b
0
, entre a
1
y b
1
, y entre a
0
y c
1
por lo
tanto la que sean de mayor seal debe llevar el rodillo abatible, en este caso son b
0
,
a
1
y a
0
.
Debe realizarse el esquema, sin tener en cuenta las condiciones adicionales, para un
solo y nico ciclo de trabajo.
Las consideraciones adicionales se incorporarn progresivamente mientras avanza
el estudio.
Figura 50. Circuito con vlvulas de rodillo abatible
138
2.7) Disear el circuito con montaje en cascada.
Secuencia: A+
B+
B-
A- C+ C-
Nmero de grupos = Nmero de lneas de salida = 3
Nmero de memorias = Nmero de grupos 1 = 2
Figura 51. Circuito con montaje en cascada
139
2.8) Disear el circuito con montaje en paso a paso mnimo.
Secuencia: A+
B+
B-
A- C+ C-
Numero de grupos = Nmero de lneas de salida = Nmero de pasos = 3
Figura 52. Circuito con montaje en paso a paso mnimo
140
2.9) Disear el circuito con montaje en paso a paso mximo.
Secuencia: A+
B+
B-
A- C+ C-
Nmero de secuencias = Nmero de pasos = 6
Figura 53. Circuito con montaje en paso a paso mximo
141
2.10) Disear el circuito con montaje en cascada elctrico = cadena mnima.
En este caso de control elctrico cambian las designaciones de los finales de carrera
(S
1
, ) y de las seales que accionan las electrovlvulas (Y
1
, ), por lo tanto, adems
del correspondiente circuito elctrico de control, debe representarse la secuencia y el
circuito neumtico de potencia.
142
Figura 54. Circuito con montaje en cascada elctrico = cadena mnima
2.11) Disear el circuito con montaje en paso a paso elctrico = cadena mxima.
El correspondiente circuito con montaje paso a paso elctrico (cadena mxima) tiene
las mismas caractersticas del montaje con paso a paso mximo utilizado en el diseo
de circuitos neumticos, es decir, por cada secuencia existe un paso elctrico. En este
caso, en lugar de la memoria, y los mdulos O e Y, se utiliza un rele, un contacto NO y
otro contacto NC.
1) Circuito neumtico de potencia:
2) Circuito elctrico de potencia (paso a paso elctrico = cadena mxima):
Figura 55. Circuito con montaje en paso a paso elctrico = cadena mxima.
143
2.12) Disear el circuito con el controlador lgico programable = PLC.
En este caso deben realizarse: a) diagrama de potencia, b) diagrama de movimientos,
c) diagrama de control, d) diagrama de contactos, e) programa en Ladder y f) el
programa en Stepper.
144
d) Diagrama de contactos
145
e) Programa en Ladder
1) EDIT 2.3 ENTER 13) RESET OUT 02 ENTER
2) LAB 10 ENTER 14) SET FLAG 20 ENTER
3) LOAD IN 01 ENTER 15) LOAD IN 02 ENTER
4) AND IN 05 ENTER 16) AND IN 03 ENTER
5) AND NOT FLAG 25 ENTER 17) AND FLAG 25 ENTER
6) SET OUT 01 ENTER 18) SET OUT 03 ENTER
7) RESET FLAG 20 ENTER 19) LOAD IN 01 ENTER
8) LOAD IN 02 ENTER 20) RESET OUT 03 ENTER
9) AND IN 03 ENTER 21) RESET FLAG 25 ENTER
10) AND NOT FLAG 20 ENTER 22) LOAD PROGRAM 2 ENTER
11) SET OUT 02 ENTER 23) JUMP 10 ENTER
12) LOAD IN 04 ENTER 24) EDIT ENTER
f) Programa en Stepper
1) EDIT 2.3 ENTER 13) RESET OUT 02 ENTER
2) LAB 10 ENTER 14) SET FLAG 20 ENTER
3) LOAD IN 01 ENTER 15) LOAD IN 02 ENTER
4) AND IN 05 ENTER 16) AND IN 03 ENTER
5) AND NOT FLAG 25 ENTER 17) AND FLAG 25 ENTER
6) SET OUT 01 ENTER 18) SET OUT 03 ENTER
7) RESET FLAG 20 ENTER 19) LOAD IN 01 ENTER
8) LOAD IN 02 ENTER 20) RESET OUT 03 ENTER
9) AND IN 03 ENTER 21) RESET FLAG 25 ENTER
10) AND NOT FLAG 20 ENTER 22) LOAD PROGRAM 2 ENTER
11) SET OUT 02 ENTER 23) JUMP 10 ENTER
12) LOAD IN 04 ENTER 24) EDIT ENTER
Figura 56 [a), b), c), d) e) y f)]. Circuito con el controlador lgico programable PLC
146
ACTIVIDADES DE APRENDIZAJE DEL MDULO 5
1) FORO DE DISCUSIN #3 AUTOMATIZACIN DE PROCESOS DE
MANUFACTURA
1) Descripcin:
En esta actividad se tratan las diferentes tecnologas utilizadas para automatizar procesos de
manufactura, ejercitando el pensamiento crtico y creativo del estudiante a travs de las
respuestas que proporcione a las preguntas generadoras.
2) Propsito de la discusin:
A travs de esta discusin se pretende que el estudiante establezca una visin de conjunto
sobre las distintas tecnologas utilizadas para automatizar y los diferentes campos de
aplicacin, con miras a la utilizacin en su futuro entorno profesional. Por lo tanto, es
necesario que argumente y apoye sus respuestas desde diferentes perspectivas y basados en
criterios cientficos.
3) Procedimiento:
3.1 Primeramente debes realizar la lectura reflexiva del mdulo 5 complementada con las
de las referencias bibliogrficas.
3.2 Cada alumno debe presentar como mnimas dos aportaciones de entrada al foro de
discusin, que reflejen directa y explcitamente la lectura de los materiales propuestos
en este mdulo. Cada aporte debes realizarlo dando respuesta a por lo menos tres
preguntas, es decir, que en los dos aportes debes responder como mnimo seis
preguntas generadoras de la discusin. Slo se presentan las ideas sin replicar o
discutir con el resto de integrantes. Deben identificarse en el Foro con el encabezado de
APORTE No. __ DE ____________________.
3.3 Los alumnos leern las aportaciones de los miembros de su grupo de discusin y
respondern en forma personal a las ideas de sus compaeros, cuestionndolas,
complementndolas, criticndolas, etc., a travs de una argumentacin terica y
respondiendo al menos a dos de sus compaeros de equipo. Deben identificarse en el Foro
con el encabezado de RPLICA No. __ DE ____________________.
3.4 Integrar una conclusin grupal en la que se presenten sus acuerdos, desacuerdos,
puntos importantes, nuevos hallazgos en su aprendizaje, entre. Deben identificarse en el
Foro con el encabezado de CONCLUSIN DE __________________.
147
4) Actividad:
Preguntas generadoras:
4.1 Disee el circuito de control (neumtico o elctrico) de la siguiente secuencia de dos
cilindros: A
+
B
+
B
. Donde se indica con el signo + la salida del vstago y con el
signo el retorno del vstago. Utilice el Software FluidSim.
4.2 Disee el circuito de control (neumtico o elctrico) de la siguiente secuencia de tres
cilindros: A
+
B
+
B
A
C
+
C
. Donde se indica con el signo + la salida del vstago y con
el signo el retorno del vstago. Utilice el Software FluidSim.
4.3 Disee el circuito de control (neumtico o elctrico) de la siguiente secuencia de tres
cilindros: A
+
A
B
+
B
C
+
C
. Donde se indica con el signo + la salida del vstago y con
el signo el retorno del vstago. Utilice el Software FluidSim.
4.4 Disee el circuito de control (neumtico o elctrico) de la siguiente secuencia de cuatro
cilindros: A
+
B
+
A
C
+
B
D
+
D
. Donde se indica con el signo + la salida del vstago
y con el signo el retorno del vstago. Utilice el Software FluidSim.
4.5 Cmo explicara el mtodo cascada para la eliminacin de seales permanentes?
4.6 Cmo explicara el mtodo paso a paso para la eliminacin de seales permanentes?
4.7 Cmo podra solucionarse una tarea de posicionamiento, como en las operaciones de
mecanizacin en las mquinas herramientas?
4.8 Con cul tecnologa (electrnica, elctrica, neumtica e hidrulica) podran realizarse
las operaciones lgicas bsicas Y, O, NO?
4.9 Con cules elementos y tecnologas se realiza la lgica cableada?
4.10 Con cules elementos y tecnologa se realiza la lgica programada?
4.11 Cules son las ventajas de la tecnologa programada sobre la cableada?
4.12 Cules son las ventajas de un sistema secuencial paso a paso sobre el cascada?
4.13 Qu representa y cul es la ventaja de un diagrama espacio fase?
4.14 Qu representa el diagrama de contactos o en escalera (ladder diagram)?
4.15 Cules son las partes principales de un PLC?
4.16 Qu lenguajes de programacin son los usuales para un PLC y cules son sus
caractersticas, ventajas y desventajas?
148
4.17 Qu opina Usted sobre los siguientes tipos de control de procesos por computador:
centralizado, distribuido e integral jerarquizado (CIM)?
4.18 Cmo est constituida la estructura bsica de un automatismo?
4.19 Cules son las principales etapas del proyecto para la realizacin de un automatismo?
4.20 Cul es su opinin sobre la metodologa recomendada para el diseo de una
automatizacin, establecida en el numeral 5.6 del Mdulo 5?
5) Criterios para la evaluacin del foro de discusin:
5.1 Presentar como mnimas dos aportaciones de entrada, dos rplicas a sus compaeros de
equipo e integrar con el grupo una conclusin de cierre de la discusin.
5.2 Reflejar directa y explcitamente la lectura de los temas propuestos por el programa, a
travs de citas textuales.
5.3 La no participacin en las fechas marcadas por el calendario para la discusin en el
grupo, causa no acreditacin de los puntos de esta actividad.
5.4 Se consideran invlidas las aportaciones de comentario o critica sin sustento (p. ej.: me
parece muy importante la postura que adopta el estudiante x sobre la lgica
programada, saludos) o de socializacin (p. ej.: hola a todos, les mando un cordial
saludo desde Malokanet, hasta pronto).
6) Modalidad del trabajo:
Todos los estudiantes.
2) CHAT #4 DISEO DE SISTEMAS AUTOMTICOS DE PRODUCCIN
En esta actividad los estudiantes tienen la oportunidad de intercambiar opiniones e ideas sobre
el diseo de circuitos secuenciales neumticos, hidrulicos, electroneumticos,
electrohidrulicos y controlados por medio de un PLC, para automatizar un sistema de
produccin dado; de manera que permita la reflexin y creacin de nuevos conocimientos.
Para su realizacin deben leer la documentacin que presenta el Mdulo 5, complementadas
con las de la bibliografa y hacer las actividades que se le indican en el espacio
correspondiente al chat # 3.
149
3) TAREA # 4: CIRCUITOS SECUENCIALES
(PROYECTO FINAL DEL CURSO DE SISTEMAS NEUMTICOS Y
OLEOHIDRULICOS)
1) Descripcin:
En esta actividad el alumno adquiere conocimientos y habilidades en el diseo e
implementacin de circuitos secuenciales para un sistema de produccin dado. Para el diseo
de los circuitos se recomienda utilizar el Software de diseo y simulacin FluidSim.
2) Propsito de la actividad:
Transfiera los conocimientos y habilidades adquiridos durante el curso diseando un proyecto
aplicado a la automatizacin de un sistema de produccin especfico, con miras a la aplicacin
en su futuro entorno profesional.
3) Procedimiento:
Lea la documentacin que presenta este mdulo, complementada con las de la bibliografa y
realice las actividades que se le indican. Cada ejercicio debe ser realizado por el grupo
correspondiente, por ejemplo, el ejercicio 1 por el grupo 1, y as sucesivamente. Debe adems
tener presente las conclusiones y recomendaciones obtenidas en la simulacin del
correspondiente ejercicio en las sesiones presnciales de prcticas realizadas en el Laboratorio
de Sistemas Oleoneumticos.
Los elementos que debe contener la tarea son los siguientes:
1) Introduccin
2) Cuerpo del trabajo
3) Conclusiones y recomendaciones
4) Referencias bibliogrficas.
4) Actividades:
Con los elementos dados en el ejercicio en cuestin, el alumno debe elaborar un proyecto
aplicando todo lo aprendido sobre automatizacin de sistemas de produccin, simularlo en el
Laboratorio de la asignatura y extraer finalmente las conclusiones y recomendaciones
correspondientes.
1. Determinar las secuencias de trabajo
2. Seleccionar la tecnologa a emplear para los elementos de trabajo y de control
3. Dimensionar los elementos de trabajo
4. Analizar el plano de situacin
5. Analizar el diagrama de funcionamiento
150
6. Disear el circuito neumtico con diseo en cascada y/o registro de desplazamiento (paso a
paso).
7. Disear el circuito neumtico de potencia y el circuito elctrico de control.
8. Disear el circuito con el PLC.
9. Elaborar las conclusiones y recomendaciones de acuerdo con la aplicacin realizada y los
juicios crticos que de all provengan
Ejercicio 1: Automatizacin del proceso para remachar pasadores
Presentacin del problema: se debe automatizar el proceso para remachar pasadores en los
extremos de una pieza de aluminio en C con las siguientes dimensiones: 30x10 cm
2
el alma,
10x10 cm
2
los extremos, espesor = 1/8. Las piezas se colocan y retiran manualmente. El
cilindro 1.0 sujeta la pieza, los dos cilindros 2.0 introducen los remaches y los sujetan,
finalmente el cilindro 3.0 remacha la segunda cabeza.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, Software de diseo y simulacin de circuitos, accesorios de montaje.
Plano de situacin:
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
151
Ejercicio 2: Automatizacin del proceso para estampar ranuras en el interior de una
pieza
Presentacin del problema: se debe automatizar el proceso para estampar ranuras en una
pieza de aluminio con las siguientes dimensiones: 30x10x10 cm
3
. Las piezas a trabajar se
colocan y retiran manualmente en el dispositivo. El cilindro 1.0 posiciona la matriz de
estampado, seguidamente estampan los cilindros 2.0, 3.0 y 4.0. Despus del ltimo proceso de
estampado retroceden simultneamente los tres cilindros 2.0, 3.0 y 4.0. Finalmente el cilindro
1.0 retrocede extrayendo la matriz de la pieza trabajada.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, Software de diseo y simulacin de circuitos, accesorios de montaje.
Plano de situacin:
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
152
Ejercicio 3: Automatizacin del proceso para doblar piezas
Presentacin del problema: se debe automatizar el proceso para doblar piezas de lminas de
acero galvanizado con las siguientes dimensiones: 50x10 cm
2
el alma, espesor = 1/8. Las
piezas se colocan y retiran manualmente. El cilindro 1.0 sujeta la pieza, el cilindro 2.0 realiza
el primer doblado y el cilindro 3.0 efecta el segundo doblado.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, Software de diseo y simulacin de circuitos, accesorios de montaje.
Plano de situacin:
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
153
Ejercicio 4: Automatizacin del proceso para cortar materiales en barras
Presentacin del problema: se debe automatizar el proceso para cortar materiales a una
medida exacta de una barra de cobre que tiene una seccin de 10x1 cm
2
y una longitud de 6 m.
La alimentacin del material se realiza por el cilindro 2.0, el cual mover en la carrera de ida
la pinza neumtica maniobrada por el cilindro 1.0 previamente cerrada.
Una vez introducido el material contra un tope fijo, queda sujetado por el cilindro de sujecin
3.0. Luego el cilindro 4.0 realiza la operacin de corte y simultneamente el cilindro 1.0 puede
abrir. Despus de realizado el corte, los cilindros 2.0 y 4.0 pueden regresar. A continuacin
afloja el cilindro de sujecin 3.0 y un nuevo ciclo puede comenzar.
Condiciones adicionales: El ciclo debe iniciarse al accionar el pulsador de MARCHA. Debe
existir la posibilidad de realizar el ciclo AUTOMATICAMENTE hasta que se agote la barra.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, Software de diseo y simulacin de circuitos, accesorios de montaje.
Plano de situacin:
154
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
Ejercicio 5: Automatizacin del proceso para el fresado de piezas
Presentacin del Problema: Automatizar el proceso para el fresado de piezas de aluminio
que se encuentran en un depsito de cada por gravedad. Las piezas tienen las siguientes
dimensiones 20x10x10 cm. El cilindro 1.0 traslada las piezas desde el depsito al dispositivo
de sujecin. El cilindro 2.0 sujeta las piezas y luego retorna el cilindro 1.0. Tan pronto la pieza
esta sujetada, se realiza el avance de las piezas con una unidad de avance oleoneumtica 3.0.
Al terminar el proceso de fresado, el cilindro 2.0 suelta la pieza. A continuacin el cilindro 4.0
expulsa la pieza y retorna. Finalmente la unidad de avance 3.0 lleva el dispositivo de sujecin
a su posicin inicial y se puede empezar un nuevo proceso.
Condiciones adicionales: El ciclo debe iniciarse al accionar el pulsador de MARCHA. Debe
existir la posibilidad de realizar el ciclo AUTOMATICAMENTE hasta que se agoten las
piezas, y CONTROL DE EXISTENCIA DE PIEZAS. Posibilidad de STOP.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, accesorios de montaje.
Plano de situacin:
155
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
Ejercicio 6: Automatizacin del proceso para el taladrado y pulido de piezas para
bisagras
Presentacin del Problema: Automatizar el proceso para el taladrado y pulido de piezas de
acero galvanizado para bisagras con las siguientes dimensiones: 70x30 cm
2
y espesor = 1/16 .
Las piezas son colocadas y retiradas manualmente en el dispositivo. Al accionar el pulsador de
marcha las piezas son sujetadas por el cilindro 1.0. A continuacin la unidad de avance
oleoneumtica 2.0 taladra la pieza. Cuando la unidad 2.0 ha retrocedido, el cilindro
transportador 3.0 lleva la mesa a la estacin de pulir, donde una segunda unidad
oleoneumtica 4.0 pule el taladro de la pieza. La herramienta de pulir vuelve a su posicin
inicial. El carro transportador 3.0 vuelve a la estacin de taladrar y el cilindro 1.0 afloja la
pieza de trabajo.
Condiciones adicionales: El ciclo debe iniciarse al accionar el pulsador de MARCHA. Al
accionar el pulsador STOP vuelven primero ambas herramientas a su posicin inicial, despus
se afloja, y el cilindro transportador vuelve a su posicin inicial.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, accesorios de montaje.
156
Plano de situacin:
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
Ejercicio 7: Automatizacin de una sierra
Presentacin del Problema: Automatizar una sierra para trabajar perfiles en C de aluminio
con las siguientes dimensiones: 100x10 cm
2
y espesor = 1/8.
Con un cilindro 1.0 se empuja el
perfil contra un tope. El cilindro 2.0 sujeta el perfil lentamente. A continuacin la unidad de
avance oleoneumtica 3.0 desplaza el cabezal de sierra lentamente, realizando la operacin de
corte, y el cilindro 1.0 puede durante este proceso retornar a su posicin inicial. Finalizado el
proceso de corte, el cabezal de sierra retrocede a su posicin inicial. Se suelta el perfil y el
cilindro 4.0 expulsa la pieza cortada.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, accesorios de montaje.
Plano de situacin:
157
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
Ejercicio 8: Automatizacin de una instalacin de lavado de piezas
Presentacin del Problema: Se debe automatizar el proceso para el lavado de piezas de
aluminio que vienen de una estacin de fresado y taladrado. Las piezas tienen las siguientes
dimensiones: 20x10x5 cm.
El cilindro 1.0 empuja la pieza a limpiar desde la cinta
transportadora 1 a un plato de lavado. El cilindro 2.0 sujeta la pieza y simultneamente el
cilindro 1.0 vuelve a su posicin inicial. Tan pronto la pieza est sujetada, el cilindro 3.0
transporta la pieza por la cabina de lavado. Al terminar el proceso de lavado, el cilindro 2.0
suelta la pieza. A continuacin el cilindro 4.0 empuja la pieza sobre la cinta transportadora 2 y
retorna. Finalmente el cilindro 3.0 lleva el plato de lavado a su posicin inicial y se puede
empezar un nuevo proceso.
158
Condiciones adicionales: El ciclo debe iniciarse al accionar el pulsador de MARCHA. Debe
existir la posibilidad de realizar el ciclo AUTOMATICAMENTE hasta que se agoten las
piezas, y CONTROL DE EXISTENCIA DE PIEZAS. Posibilidad de STOP.
Materiales: Tableros didcticos de prcticas con los elementos correspondientes,
computadora, accesorios de montaje.
Plano de situacin:
(Festo Didactic GmbH & Co. KG, Alemania)
Diagrama espacio - fase:
5) Criterios para la evaluacin de la Tarea # 4:
1) Contener los datos de identificacin de los integrantes del grupo.
2) Aludir a los conceptos manejados en las lecturas sugeridas.
3) Presentar el trabajo en Arial 12, interlineado a doble espacio, alineacin justificada y
hoja de titulo.
4) Entregar cada una de las partes en las fechas establecidas, a la cuenta del profesor o en
el espacio destinado para la actividad.
6) Modalidad del trabajo:
159
Grupo de dos estudiantes conformados por el Profesor
You might also like
- Contraseña CaprendizDocument1 pageContraseña Caprendizsefair12No ratings yet
- Ieee80 2Document109 pagesIeee80 2Anonymous DefbSuwiNo ratings yet
- f08-9224-003 Instrumento de Evaluación Micrometro y CalibradorDocument7 pagesf08-9224-003 Instrumento de Evaluación Micrometro y Calibradorsefair12No ratings yet
- Unidad 1, Motores de Combustión InternaDocument19 pagesUnidad 1, Motores de Combustión InternaCristian Camilo Aguirre MarquezNo ratings yet
- Reglamento Tecnico de Instalaciones ElectricasDocument164 pagesReglamento Tecnico de Instalaciones Electricasaparraj84% (32)
- Plan de Mejoramiento MariiDocument4 pagesPlan de Mejoramiento MariibrayanNo ratings yet
- Intro Ducci OnDocument10 pagesIntro Ducci Onsefair12No ratings yet
- f08-9224-003 Instrumento de Evaluación Micrometro y CalibradorDocument7 pagesf08-9224-003 Instrumento de Evaluación Micrometro y Calibradorsefair12No ratings yet
- TrabajoDocument16 pagesTrabajosefair12No ratings yet
- Aditivos de Los Aceites LubricantesDocument9 pagesAditivos de Los Aceites LubricantesEdison Quispe CandoNo ratings yet
- Los Tipos de Aceite y Su Importancia para El AutoDocument11 pagesLos Tipos de Aceite y Su Importancia para El Autosefair12No ratings yet
- Asesorías en El Cumplimiento de Los Reglamentos Técnicos RETIE Y RETILAPDocument3 pagesAsesorías en El Cumplimiento de Los Reglamentos Técnicos RETIE Y RETILAPsefair12No ratings yet
- Nuevo Documento de TextoDocument1 pageNuevo Documento de Textosefair12No ratings yet
- Centro MulticulturalDocument21 pagesCentro Multiculturalsefair12No ratings yet
- La Politica de AristotelesDocument11 pagesLa Politica de Aristotelessefair12100% (2)
- Invitacion Publica Proceso Conmcs No. 034Document20 pagesInvitacion Publica Proceso Conmcs No. 034sefair12No ratings yet
- Fecundación in VitroDocument2 pagesFecundación in Vitrosefair12No ratings yet
- El Dibujo TécnicoDocument13 pagesEl Dibujo Técnicosefair12No ratings yet
- Mando Directo e Indirecto de Un Cilindro Simple y Doble EfectoDocument25 pagesMando Directo e Indirecto de Un Cilindro Simple y Doble Efectosefair1250% (2)
- Op 7Document1 pageOp 7sefair12No ratings yet
- Auditorías de Calidad.2008Document5 pagesAuditorías de Calidad.2008Mariangely CaraballoNo ratings yet
- m2 Fr17 Guia Didactica Auditoria Calidad 1Document10 pagesm2 Fr17 Guia Didactica Auditoria Calidad 1Katy Johanna Urango AnayaNo ratings yet
- m2 Fr17 Guia Didactica Auditoria Calidad 1Document10 pagesm2 Fr17 Guia Didactica Auditoria Calidad 1Katy Johanna Urango AnayaNo ratings yet
- Trabajo de DiodosDocument6 pagesTrabajo de Diodossefair12No ratings yet
- Horario Mes de SeptiembreDocument3 pagesHorario Mes de Septiembresefair12No ratings yet
- Maquinaria Pesada ConstructoraDocument208 pagesMaquinaria Pesada Constructoraadri_rodriguez_4No ratings yet
- La GimnasiaDocument2 pagesLa Gimnasiasefair12No ratings yet
- Metas de Equipo 2Document6 pagesMetas de Equipo 2sefair12No ratings yet
- Trabajo de InglesDocument1 pageTrabajo de Inglessefair12No ratings yet
- ElectronicaDocument8 pagesElectronicaJoel Rojas BenaventeNo ratings yet
- Unidad para Correr Liner Con Coiled Tubing Modelo CTDocument10 pagesUnidad para Correr Liner Con Coiled Tubing Modelo CTEd CalheNo ratings yet
- Evolución de La ComputadoraDocument6 pagesEvolución de La ComputadoraYakilen MatuteNo ratings yet
- Tensionadores Superbolt - PDFDocument12 pagesTensionadores Superbolt - PDFWilmer Ropero CastañoNo ratings yet
- Ensayo de PLCDocument10 pagesEnsayo de PLCpatrohellNo ratings yet
- Abreviaturas en Ingles y Sus SignificadosDocument2 pagesAbreviaturas en Ingles y Sus Significadospedrosoto2100% (1)
- Especificaciones TécnicasDocument6 pagesEspecificaciones TécnicasCOP20 LimaNo ratings yet
- ZefirotDocument17 pagesZefirotLeonardo Samuel Torres OrozcoNo ratings yet
- Fabricantes de Equipos de ComputoDocument10 pagesFabricantes de Equipos de ComputoLeo100% (1)
- Reporte LabviewDocument46 pagesReporte LabviewAnonymous vp4XwXlUNo ratings yet
- Manual de Configuración de La BIOSDocument13 pagesManual de Configuración de La BIOSBrenda VargasNo ratings yet
- Dominio de Colisión y BroadcastDocument4 pagesDominio de Colisión y BroadcastJaneth GaRciiaNo ratings yet
- Prueba S No Funcional EsDocument4 pagesPrueba S No Funcional EsSebastian MuñozNo ratings yet
- Funciones de WordDocument5 pagesFunciones de WordblancaYarzaNo ratings yet
- Dahua NVR616 64128 4KS2 Super NVR 64 Canales Ficha Tecnica EspañolDocument3 pagesDahua NVR616 64128 4KS2 Super NVR 64 Canales Ficha Tecnica EspañolAlex GzaNo ratings yet
- Componentes de La Tarjeta MadreDocument6 pagesComponentes de La Tarjeta MadreJulio Hernandez GorocicaNo ratings yet
- Inserción de ObjetosDocument10 pagesInserción de ObjetosAriel CastilloNo ratings yet
- Ipa ProgramacionDocument2 pagesIpa ProgramacionEimer Metrorum Cubicorum ConplectunturNo ratings yet
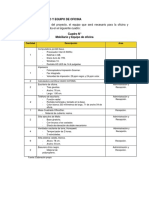
- Mobiliario y Equipo de OficinaDocument1 pageMobiliario y Equipo de OficinaZemileNo ratings yet
- 01 Requerimiento de Materiales, Maquinarias, EquiposDocument12 pages01 Requerimiento de Materiales, Maquinarias, EquiposJaime Chaiña ChurataNo ratings yet
- Ailen Echagüe - TP N°4 MemoriasDocument3 pagesAilen Echagüe - TP N°4 MemoriasAilen EchagüeNo ratings yet
- Virus InformaticoDocument17 pagesVirus InformaticowiditoxdNo ratings yet
- Optimizar Windows 10Document7 pagesOptimizar Windows 10RFID DemarkaNo ratings yet
- 06 - Instalación - TP1 (Sin Preg)Document24 pages06 - Instalación - TP1 (Sin Preg)Francisco Franco Caudillo y LectorNo ratings yet
- Escaner BelkisDocument47 pagesEscaner Belkiselmer yomar angarita castroNo ratings yet
- Conexiones Entre Arduino y El Sensor DHT11 o DHT22Document5 pagesConexiones Entre Arduino y El Sensor DHT11 o DHT22Jhordy Jhampier Ramos VenturoNo ratings yet
- ADR-Sabre SDocument26 pagesADR-Sabre Sromerorivero100% (1)
- Soporte TecnicoDocument2 pagesSoporte TecnicoMaria MayorNo ratings yet
- Informe Recursos Propios - Iv Trimestre-22Document3 pagesInforme Recursos Propios - Iv Trimestre-22Marilú Miguel HonorioNo ratings yet
- Reloj Casio qw4380 PDFDocument4 pagesReloj Casio qw4380 PDFadolfoc261No ratings yet