You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document14 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Analog To Digital Converter PDFDocument4 pagesAnalog To Digital Converter PDFtowfiqeeeNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Adc 0808Document6 pagesAdc 0808GokulThalaNo ratings yet
- Adc Dac Converter NewDocument50 pagesAdc Dac Converter NewJaya PaulNo ratings yet
- Analog To Digital ConvertersDocument11 pagesAnalog To Digital Convertersمحمد ماجدNo ratings yet
- Adc 0808Document6 pagesAdc 0808gouttNo ratings yet
- Analog-To Digital Conversion (ADC or A/D) : 8 BitsDocument35 pagesAnalog-To Digital Conversion (ADC or A/D) : 8 BitsMANOJ MNo ratings yet
- Chapter 1 IntroductionDocument39 pagesChapter 1 IntroductionNivedini KuttiNo ratings yet
- A - D ConverterDocument19 pagesA - D Converterask4imadeosas9393No ratings yet
- Digital To Analog and Analog To Digital Conversion: D/A or DAC and A/D or AdcDocument50 pagesDigital To Analog and Analog To Digital Conversion: D/A or DAC and A/D or AdcsomosreeNo ratings yet
- ZozoDocument5 pagesZozoZozo BaryNo ratings yet
- Sar AdcDocument40 pagesSar AdcNivedini KuttiNo ratings yet
- Analog To Digital ConverterDocument11 pagesAnalog To Digital ConverterFf Fr100% (1)
- ANALOG-TO-DIGITAL CONVERTER CIRCUITS: BASIC CONVERSION SCHEMESDocument28 pagesANALOG-TO-DIGITAL CONVERTER CIRCUITS: BASIC CONVERSION SCHEMESİBRAHİM YÜMLÜNo ratings yet
- berkes_interfacing exp arrangementDocument20 pagesberkes_interfacing exp arrangementAditya K NNo ratings yet
- Ad7714/Ad7715 Instrumentation Converter Faqs: Calibration: How Is Self-Calibration Implemented On The Ad7714/Ad7715?Document4 pagesAd7714/Ad7715 Instrumentation Converter Faqs: Calibration: How Is Self-Calibration Implemented On The Ad7714/Ad7715?mhasansharifiNo ratings yet
- Lec 5 ADC PDFDocument5 pagesLec 5 ADC PDFKhalifa EltayebNo ratings yet
- Digital-to-Analog Analog-to-Digital: Interface Part IV MicroprocessorDocument30 pagesDigital-to-Analog Analog-to-Digital: Interface Part IV MicroprocessorVineeth KumarNo ratings yet
- PIC PPT 13104022 (4th Year)Document41 pagesPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- Drill 5.0 Adc Dac Sensors Part 1Document18 pagesDrill 5.0 Adc Dac Sensors Part 1DuaneNo ratings yet
- Analog To Digital ConvertDocument20 pagesAnalog To Digital ConvertluxiaofengNo ratings yet
- ADCDocument3 pagesADCnandan_dubey93No ratings yet
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- Data Conversion CCTSDocument5 pagesData Conversion CCTSDavis AllanNo ratings yet
- Mini Project Report-2Document26 pagesMini Project Report-2Remya Ramakrishnan0% (2)
- Bel - 16 - ADC and DACDocument26 pagesBel - 16 - ADC and DACBharavi K SNo ratings yet
- Digital Excitation TechnologyDocument11 pagesDigital Excitation TechnologyMohamed RashidNo ratings yet
- Interfacing To The Analog WorldDocument47 pagesInterfacing To The Analog WorldRM ZhaloNo ratings yet
- Analog To Digital ConverterDocument5 pagesAnalog To Digital ConverterAnonymous j0aO95fgNo ratings yet
- Me 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesDocument13 pagesMe 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesSenthil KumarNo ratings yet
- PC Interfacing Fourth Level Lecture Twelve Adcs Converter With Parallel I/O InterfaceDocument8 pagesPC Interfacing Fourth Level Lecture Twelve Adcs Converter With Parallel I/O InterfaceaaaaNo ratings yet
- ADC 0808 8-Bit Analog to Digital Converter GuideDocument6 pagesADC 0808 8-Bit Analog to Digital Converter Guidesrc e-solutionsNo ratings yet
- Analog To Digital ConverterDocument4 pagesAnalog To Digital Converterzero kimochiNo ratings yet
- (Model No:VBMB - 002) : 8-Bit Digital To Analog Converter Interface BoardDocument56 pages(Model No:VBMB - 002) : 8-Bit Digital To Analog Converter Interface BoardSanthanu Surendran100% (1)
- R - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionDocument10 pagesR - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionMiguel BrunoNo ratings yet
- Teknik Akusisi Data: I Putu Elba Duta Nugraha, S.T., M.TDocument29 pagesTeknik Akusisi Data: I Putu Elba Duta Nugraha, S.T., M.TAl UlyaNo ratings yet
- Adc - DacDocument4 pagesAdc - DacShaheer TariqNo ratings yet
- ADC and DACDocument4 pagesADC and DACjeniferNo ratings yet
- Computer Based Data Acquisition & Control: Riyas.P.SDocument18 pagesComputer Based Data Acquisition & Control: Riyas.P.SVivek NairNo ratings yet
- El Amraouiyine ImadDocument22 pagesEl Amraouiyine ImadImad EL AmraouiyineNo ratings yet
- COMSATS ADC Lab GuideDocument16 pagesCOMSATS ADC Lab GuideBilal HabibNo ratings yet
- FIRDocument13 pagesFIRprateekkumardash2002No ratings yet
- PIC Analog To Digital Converter TutorialDocument5 pagesPIC Analog To Digital Converter TutorialSharath MunduriNo ratings yet
- Adc Dac InterfacingDocument25 pagesAdc Dac InterfacingSuchetha SriNo ratings yet
- Chapter 4Document23 pagesChapter 4Tejan Kumar SharmaNo ratings yet
- Analog to Digital Conversion in AVR MicrocontrollersDocument12 pagesAnalog to Digital Conversion in AVR MicrocontrollersSathiya NathanNo ratings yet
- GROUP4Document59 pagesGROUP4Ian Harvey Mendoza100% (1)
- ANALOG INPUT MODULES DIGITIZE SIGNALSDocument110 pagesANALOG INPUT MODULES DIGITIZE SIGNALSkamalNo ratings yet
- Flash Convertors Tracking MethodsDocument7 pagesFlash Convertors Tracking MethodsConnie ShoriwaNo ratings yet
- Digital Ammeter Using Atmega8aDocument13 pagesDigital Ammeter Using Atmega8aChandanNo ratings yet
- 8 A-D ConverterDocument30 pages8 A-D Converterneoloader145No ratings yet
- ADC PPTDocument28 pagesADC PPTGaurav KhandelwalNo ratings yet
- Adc 0804Document5 pagesAdc 0804gouttNo ratings yet
- Analog To Digital & Digital To Analog ConvertersDocument66 pagesAnalog To Digital & Digital To Analog ConvertersSai Krishna Kodali100% (1)
- EDN Design Ideas 1998Document166 pagesEDN Design Ideas 1998chag1956100% (4)
- Study of Various ADCs and Compare Their Performance and ParametersDocument12 pagesStudy of Various ADCs and Compare Their Performance and ParametersijaertNo ratings yet
- Adc DacDocument12 pagesAdc DacSonu SauravNo ratings yet
- SSC JE Result Notice 2016Document2 pagesSSC JE Result Notice 2016Kabya Srivastava100% (1)
- 8051 ExplainedDocument16 pages8051 ExplainedApurva DesaiNo ratings yet
- Gate Mathematics: MAI) 4SDocument258 pagesGate Mathematics: MAI) 4SManivannan VadiveluNo ratings yet
- NetMarks C 19122017Document132 pagesNetMarks C 19122017Manish SharmaNo ratings yet
- 8085 Microprocessor Opcode TableDocument6 pages8085 Microprocessor Opcode TableSagnik Gangopadhyay67% (3)
- Novak DjokovicDocument12 pagesNovak DjokovicSayan Kumar Khan100% (1)
- Operating System GATE NotesDocument176 pagesOperating System GATE NotesVicky TiwariNo ratings yet
- SSC JE Result Notice 2016Document2 pagesSSC JE Result Notice 2016Kabya Srivastava100% (1)
- View - Print Submitted Form PDFDocument2 pagesView - Print Submitted Form PDFRAHUL KUMARNo ratings yet
- Compiler Hand Written Notes Made EasyDocument127 pagesCompiler Hand Written Notes Made EasyArpkeet IJNo ratings yet
- DurgaSoft SCJP Notes Part 1 - JavabynataraJ PDFDocument255 pagesDurgaSoft SCJP Notes Part 1 - JavabynataraJ PDFSiva Sai Charan KondapiNo ratings yet
- MP QBDocument19 pagesMP QBRaji SharmiNo ratings yet
- Ju Ug Placement Records 2019-20Document2 pagesJu Ug Placement Records 2019-20Sayan Kumar KhanNo ratings yet
- Hibernate - Natraj - SatyaDocument262 pagesHibernate - Natraj - SatyaMichael J GeorgeNo ratings yet
- Java Applet BasicsDocument10 pagesJava Applet BasicsrednriNo ratings yet
- MicrocontrollerDocument414 pagesMicrocontrollerSayan Kumar KhanNo ratings yet
- Paper 15Document26 pagesPaper 15Sayan Kumar KhanNo ratings yet
- MicroProcessor & Computer OrganisationDocument74 pagesMicroProcessor & Computer OrganisationAnubhab BanerjeeNo ratings yet
- Paper 13Document22 pagesPaper 13Sayan Kumar KhanNo ratings yet
- Micro Notes 2-1Document11 pagesMicro Notes 2-1Sayan Kumar KhanNo ratings yet
- Micro NotesDocument24 pagesMicro NotesSayan Kumar KhanNo ratings yet
- Paper 16Document28 pagesPaper 16Sayan Kumar KhanNo ratings yet
- 29 QusDocument16 pages29 QusAsafAhmadNo ratings yet
- Fiitjee: JEE (Advanced), 2015Document24 pagesFiitjee: JEE (Advanced), 2015Sayan Kumar KhanNo ratings yet
- 33 QusDocument15 pages33 QusAsafAhmadNo ratings yet
- Paper 9Document20 pagesPaper 9Sayan Kumar KhanNo ratings yet
- Paper 7Document22 pagesPaper 7Sayan Kumar KhanNo ratings yet
- Paper 8Document23 pagesPaper 8Sayan Kumar KhanNo ratings yet
- Paper 6Document20 pagesPaper 6Sayan Kumar KhanNo ratings yet
- Mtu Mat 125e - DQDocument2 pagesMtu Mat 125e - DQRafael Antônio CostaNo ratings yet
- Vertex Standard Vx-351pmr446Document30 pagesVertex Standard Vx-351pmr446Troy LarimerNo ratings yet
- Bahir Dar University Introduction to Electrical Machines Lecture on MagneticsDocument46 pagesBahir Dar University Introduction to Electrical Machines Lecture on MagneticsNatyBNo ratings yet
- Cat6 U Utp Cable 219585 PDFDocument2 pagesCat6 U Utp Cable 219585 PDFjoseNo ratings yet
- Circuit Construction Kit Ac Virtual Lab HTML Guide - enDocument4 pagesCircuit Construction Kit Ac Virtual Lab HTML Guide - enkavithaNo ratings yet
- Chattanooga Intelect-Legend ServicioDocument115 pagesChattanooga Intelect-Legend ServicioPaul Eduardo Munoz100% (2)
- CHS-6000A Capacitive Height Sensing System: Operation and Installation ManualDocument21 pagesCHS-6000A Capacitive Height Sensing System: Operation and Installation ManualAnonymous uFO52sNRAgNo ratings yet
- FMCW ThesisDocument9 pagesFMCW Thesisirywesief100% (2)
- Sufi 1111Document39 pagesSufi 1111abdul basitNo ratings yet
- Instrukcja XT 546 - WWW - Ebmia.plDocument3 pagesInstrukcja XT 546 - WWW - Ebmia.plAwdhesh Singh BhadoriyaNo ratings yet
- Demand Load & Voltage Drop CalculationDocument1 pageDemand Load & Voltage Drop CalculationKhizer Amin100% (1)
- Electricity and Magnetism TDA Writing RepsonseDocument2 pagesElectricity and Magnetism TDA Writing RepsonseAnonymous cAOc8lc5PRNo ratings yet
- Spot WeldingDocument5 pagesSpot WeldingRao MaazNo ratings yet
- PT Operation and Maintenance ManualDocument8 pagesPT Operation and Maintenance ManualDavid Mtz ZuritaNo ratings yet
- Circuit CH9Document24 pagesCircuit CH9MMNo ratings yet
- Electrical Substation Scrutinizing and Controlling Device From Remote AreaDocument3 pagesElectrical Substation Scrutinizing and Controlling Device From Remote AreaJiiva GopiNo ratings yet
- The RF Line: Semiconductor Technical DataDocument4 pagesThe RF Line: Semiconductor Technical DatabellscbNo ratings yet
- Motor Data Sheets-1000kW (ABB)Document30 pagesMotor Data Sheets-1000kW (ABB)Sandeep PartiNo ratings yet
- IECEx & ATEX 95 Triple Certified Cable GlandsDocument8 pagesIECEx & ATEX 95 Triple Certified Cable GlandsrocketvtNo ratings yet
- Product Type Report: S.C. Halley Cables, S.R.LDocument4 pagesProduct Type Report: S.C. Halley Cables, S.R.LCristian FieraruNo ratings yet
- Série RS Parts 2019Document158 pagesSérie RS Parts 2019Vinicios LoureiroNo ratings yet
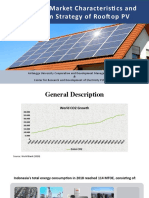
- Analysis of Market Characteristi Cs and Promoti On Strategy of Rooftop PVDocument103 pagesAnalysis of Market Characteristi Cs and Promoti On Strategy of Rooftop PVSonu PathakNo ratings yet
- Power System Incident ReportDocument33 pagesPower System Incident ReportmentongNo ratings yet
- The Vivaldi Aerial - P.J.gibsonDocument5 pagesThe Vivaldi Aerial - P.J.gibsonIsmael Roberto Acevedo PavezNo ratings yet
- Motor Starter Ready ReckonerDocument2 pagesMotor Starter Ready ReckoneranandpurushNo ratings yet
- BDPI WavelinQ D0153-5-ESU-1 PF10766 User-GuideDocument72 pagesBDPI WavelinQ D0153-5-ESU-1 PF10766 User-GuideTof MfaNo ratings yet
- Report Edm Die SinkerDocument21 pagesReport Edm Die SinkerAwateff Al-Jefry II100% (8)
- Service Manual VideoJet 1210, 1220 и 1510Document380 pagesService Manual VideoJet 1210, 1220 и 1510yemoleg88No ratings yet
- SheetDocument9 pagesSheetLasin Chottu SureshNo ratings yet
- 256 MCDC506 eDocument3 pages256 MCDC506 eAndy KristiantoNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AFrom EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ARating: 5 out of 5 stars5/5 (1)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet