You might also like
- PLC Fundamental TheoryDocument97 pagesPLC Fundamental Theorykodandaram100% (2)
- Fundamental PLC TRG ScheduleDocument8 pagesFundamental PLC TRG SchedulekodandaramNo ratings yet
- Siemens - Motor SpecificationsDocument50 pagesSiemens - Motor SpecificationsArtifoxNo ratings yet
- Handbook of AC Servo SystemsDocument42 pagesHandbook of AC Servo Systemskodandaram100% (1)
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
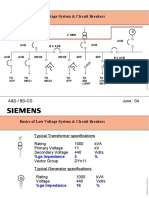
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Document17 pagesBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- MRP LVSGR 15 Dec 08Document56 pagesMRP LVSGR 15 Dec 08kodandaramNo ratings yet
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
- Motor Maintenance FoliosDocument16 pagesMotor Maintenance Folioskodandaram100% (1)
- Contactor BasicsDocument22 pagesContactor Basicskodandaram100% (4)
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- Ac DriveDocument32 pagesAc DrivedenramrNo ratings yet
- Basics of AC Drives 3Document28 pagesBasics of AC Drives 3kodandaramNo ratings yet
- Baba ResumeDocument2 pagesBaba ResumekodandaramNo ratings yet
- Acd 1Document36 pagesAcd 1lvb123No ratings yet
- Load-Frequency Regulation Under0-06Document9 pagesLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Siemens AC Motors BOOKDocument39 pagesSiemens AC Motors BOOKPedada AdityaNo ratings yet
- Teaching Load Frequency Control Using Matlab and SimulinkDocument38 pagesTeaching Load Frequency Control Using Matlab and SimulinkkodandaramNo ratings yet
- Ge - 06Document1 pageGe - 06kodandaramNo ratings yet
- Kothariapp2000 06Document6 pagesKothariapp2000 06kodandaramNo ratings yet
- Analysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementsDocument7 pagesAnalysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementskodandaramNo ratings yet
- Magnetic Fluid and Nanoparticle Applications To NanotechnologyDocument6 pagesMagnetic Fluid and Nanoparticle Applications To NanotechnologykodandaramNo ratings yet
- Gordon Woodward: City of Coventry Single and Two Phase Generation and DistributionDocument4 pagesGordon Woodward: City of Coventry Single and Two Phase Generation and DistributionkodandaramNo ratings yet
- Abstract, N - Kishor-06Document3 pagesAbstract, N - Kishor-06kodandaramNo ratings yet
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDocument4 pagesApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramNo ratings yet
- Decentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniquesDocument6 pagesDecentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniqueskodandaramNo ratings yet
- Resume (Core)Document3 pagesResume (Core)kodandaramNo ratings yet
- The Prospects of Nanotechnology in Electrical Power Engineering PDFDocument4 pagesThe Prospects of Nanotechnology in Electrical Power Engineering PDFMohamed Abdel Aziz DarwishNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cast Copper Alloy Solder Joint Pressure Fittings: ASME B16.18-2018Document41 pagesCast Copper Alloy Solder Joint Pressure Fittings: ASME B16.18-2018crescon designNo ratings yet
- How To Write A Cover Letter For A Training ProgramDocument4 pagesHow To Write A Cover Letter For A Training Programgyv0vipinem3100% (2)
- Lantern October 2012Document36 pagesLantern October 2012Jovel JosephNo ratings yet
- Introduction To ResearchDocument5 pagesIntroduction To Researchapi-385504653No ratings yet
- Configure Initial ISAM Network SettingsDocument4 pagesConfigure Initial ISAM Network SettingsnelusabieNo ratings yet
- Pashmina vs Cashmere: Which Luxury Fiber Is SofterDocument15 pagesPashmina vs Cashmere: Which Luxury Fiber Is SofterSJVN CIVIL DESIGN100% (1)
- OutliningDocument17 pagesOutliningJohn Mark TabbadNo ratings yet
- Bakhtar University: Graduate School of Business AdministrationDocument3 pagesBakhtar University: Graduate School of Business AdministrationIhsanulhaqnooriNo ratings yet
- FIN 1050 - Final ExamDocument6 pagesFIN 1050 - Final ExamKathi100% (1)
- English Literature RevisionDocument61 pagesEnglish Literature RevisionAlex Cobain Glinwood100% (1)
- PNP TELEPHONE DIRECTORY As of JUNE 2022Document184 pagesPNP TELEPHONE DIRECTORY As of JUNE 2022lalainecd0616No ratings yet
- Grammar Level 1 2013-2014 Part 2Document54 pagesGrammar Level 1 2013-2014 Part 2Temur SaidkhodjaevNo ratings yet
- IkannnDocument7 pagesIkannnarya saNo ratings yet
- How to use fireworks displays at Indian weddings to create magical memoriesDocument3 pagesHow to use fireworks displays at Indian weddings to create magical memoriesChitra NarayananNo ratings yet
- The Ethics of Sexual Reorientation What Should Clinicians and Researchers DoDocument8 pagesThe Ethics of Sexual Reorientation What Should Clinicians and Researchers DoLanny Dwi ChandraNo ratings yet
- AdmitCard 1688037Document1 pageAdmitCard 1688037P.Supreeth ReddyNo ratings yet
- Eric Bennett - Workshops of Empire - Stegner, Engle, and American Creative Writing During The Cold War (2015, University of Iowa Press) - Libgen - LiDocument231 pagesEric Bennett - Workshops of Empire - Stegner, Engle, and American Creative Writing During The Cold War (2015, University of Iowa Press) - Libgen - LiÖzge FındıkNo ratings yet
- 1 Chapter I Translation TheoryDocument19 pages1 Chapter I Translation TheoryAditya FirmansyahNo ratings yet
- Mixed-Use Proposal Dormitory and Hotel High-RiseDocument14 pagesMixed-Use Proposal Dormitory and Hotel High-RiseShanaia BualNo ratings yet
- The 4Ps of Labor: Passenger, Passageway, Powers, and PlacentaDocument4 pagesThe 4Ps of Labor: Passenger, Passageway, Powers, and PlacentaMENDIETA, JACQUELINE V.No ratings yet
- Fitting A Logistic Curve To DataDocument12 pagesFitting A Logistic Curve To DataXiaoyan ZouNo ratings yet
- Research Paper On The Hells AngelsDocument6 pagesResearch Paper On The Hells Angelsfvg2xg5r100% (1)
- Extra Grammar Exercises (Unit 6, Page 64) : Top Notch 3, Third EditionDocument4 pagesExtra Grammar Exercises (Unit 6, Page 64) : Top Notch 3, Third EditionA2020No ratings yet
- Eng9 - Q3 - M4 - W4 - Interpret The Message Conveyed in A Poster - V5Document19 pagesEng9 - Q3 - M4 - W4 - Interpret The Message Conveyed in A Poster - V5FITZ100% (1)
- ISO 9001 internal audit criteria and examples guideDocument22 pagesISO 9001 internal audit criteria and examples guideMukesh Yadav100% (2)
- LIN 1. General: Body Electrical - Multiplex Communication BE-13Document2 pagesLIN 1. General: Body Electrical - Multiplex Communication BE-13Roma KuzmychNo ratings yet
- SalutogenicshandbookDocument16 pagesSalutogenicshandbookAna EclipseNo ratings yet
- Rebekah Hoeger ResumeDocument1 pageRebekah Hoeger ResumerebekahhoegerNo ratings yet
- Jhansi Aptc Form 40 A 1Document1 pageJhansi Aptc Form 40 A 1Siva KumarNo ratings yet