You might also like
- Fundamental PLC TRG ScheduleDocument8 pagesFundamental PLC TRG SchedulekodandaramNo ratings yet
- Siemens - Motor SpecificationsDocument50 pagesSiemens - Motor SpecificationsArtifoxNo ratings yet
- PLC Fundamental TheoryDocument97 pagesPLC Fundamental Theorykodandaram100% (2)
- MRP LVSGR 15 Dec 08Document56 pagesMRP LVSGR 15 Dec 08kodandaramNo ratings yet
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- Handbook of AC Servo SystemsDocument42 pagesHandbook of AC Servo Systemskodandaram100% (1)
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
- Microprocessor Based Overload Relay 3RB12Document11 pagesMicroprocessor Based Overload Relay 3RB12kodandaramNo ratings yet
- Motor StandardsDocument17 pagesMotor Standardskodandaram100% (4)
- Siemens AC Motors BOOKDocument39 pagesSiemens AC Motors BOOKPedada AdityaNo ratings yet
- Motor Maintenance FoliosDocument16 pagesMotor Maintenance Folioskodandaram100% (1)
- Contactor BasicsDocument22 pagesContactor Basicskodandaram100% (4)
- Ge - 06Document1 pageGe - 06kodandaramNo ratings yet
- Ac DriveDocument32 pagesAc DrivedenramrNo ratings yet
- Basics of AC Drives 2Document20 pagesBasics of AC Drives 2kodandaramNo ratings yet
- Teaching Load Frequency Control Using Matlab and SimulinkDocument38 pagesTeaching Load Frequency Control Using Matlab and SimulinkkodandaramNo ratings yet
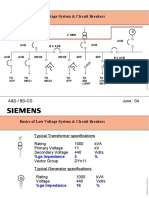
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Document17 pagesBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Load-Frequency Regulation Under0-06Document9 pagesLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Acd 1Document36 pagesAcd 1lvb123No ratings yet
- Baba ResumeDocument2 pagesBaba ResumekodandaramNo ratings yet
- Analysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementsDocument7 pagesAnalysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementskodandaramNo ratings yet
- Gordon Woodward: City of Coventry Single and Two Phase Generation and DistributionDocument4 pagesGordon Woodward: City of Coventry Single and Two Phase Generation and DistributionkodandaramNo ratings yet
- Abstract, N - Kishor-06Document3 pagesAbstract, N - Kishor-06kodandaramNo ratings yet
- Kothariapp2000 06Document6 pagesKothariapp2000 06kodandaramNo ratings yet
- Decentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniquesDocument6 pagesDecentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniqueskodandaramNo ratings yet
- Resume (Core)Document3 pagesResume (Core)kodandaramNo ratings yet
- The Prospects of Nanotechnology in Electrical Power Engineering PDFDocument4 pagesThe Prospects of Nanotechnology in Electrical Power Engineering PDFMohamed Abdel Aziz DarwishNo ratings yet
- Magnetic Fluid and Nanoparticle Applications To NanotechnologyDocument6 pagesMagnetic Fluid and Nanoparticle Applications To NanotechnologykodandaramNo ratings yet
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDocument4 pagesApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Synology DS620slim Data Sheet EnuDocument8 pagesSynology DS620slim Data Sheet EnuSteve AttwoodNo ratings yet
- Printing - Tetrameshing A Volume in A Single Step - HM-3230Document7 pagesPrinting - Tetrameshing A Volume in A Single Step - HM-3230api-19817003No ratings yet
- A Study On The Consumption of OTT Platforms Among YouthDocument37 pagesA Study On The Consumption of OTT Platforms Among YouthVartika VermaNo ratings yet
- VLSI Report PDFDocument20 pagesVLSI Report PDFNurulAnisAhmadNo ratings yet
- The DES Algorithm IllustratedDocument10 pagesThe DES Algorithm IllustratedMoosa Khalid0% (1)
- Voltage Source Inverter Drive: Ece 504 - Experiment 2Document17 pagesVoltage Source Inverter Drive: Ece 504 - Experiment 2Olimpiu StoicutaNo ratings yet
- TRENDsCampus ADVANCED Hybrid Cloud Security Deck V5Document224 pagesTRENDsCampus ADVANCED Hybrid Cloud Security Deck V5Muhammed İbrahim TatarNo ratings yet
- Network Operating Systems and Distributed OS ConceptsDocument43 pagesNetwork Operating Systems and Distributed OS ConceptsDr. Atta ur Rehman KhanNo ratings yet
- Check List For Backfilling WorksDocument2 pagesCheck List For Backfilling WorksYash SharmaNo ratings yet
- FlowCheck User ManualDocument88 pagesFlowCheck User ManualNicole WilliamsNo ratings yet
- 6.3 Material Management - Material Transfers Using Requisition Move OrderDocument20 pages6.3 Material Management - Material Transfers Using Requisition Move Ordervinoth4iNo ratings yet
- Digital Video Camera Recorder: DCR-TRV230/TRV330/TRV530Document156 pagesDigital Video Camera Recorder: DCR-TRV230/TRV330/TRV530maseloNo ratings yet
- P808 For Windows ManualDocument117 pagesP808 For Windows ManualJose Albino Rangel SanchezNo ratings yet
- Practice Project - Tutorial MicrostrategyDocument38 pagesPractice Project - Tutorial MicrostrategyAnandh Kumar50% (2)
- Fusion - Financial Reports PDFDocument502 pagesFusion - Financial Reports PDFDUNNA PAVITRANo ratings yet
- RX V371 - HTR 3064Document103 pagesRX V371 - HTR 3064sagtv0% (1)
- Aquaplus Tech Info 2005 Rev 1 - EnglishDocument23 pagesAquaplus Tech Info 2005 Rev 1 - EnglishJvlValenzuelaNo ratings yet
- Red PagesDocument146 pagesRed PagesmcastilhoNo ratings yet
- Cerberus PRO: 252-Point and 504-Point Addressable Control PanelDocument4 pagesCerberus PRO: 252-Point and 504-Point Addressable Control PanelFabianAldanaHerreraNo ratings yet
- Web Programming - Building Internet ApplicationsDocument624 pagesWeb Programming - Building Internet Applicationssameer jadhav100% (2)
- DM Yourself Character Sheet (Form-Fillable)Document1 pageDM Yourself Character Sheet (Form-Fillable)StefoNo ratings yet
- MultiplexingDocument38 pagesMultiplexingBindhya Basini Mishra0% (1)
- SVC 7.2 ImplementationDocument930 pagesSVC 7.2 Implementationgumba12No ratings yet
- Gbu Brochure 2019-20 PDFDocument60 pagesGbu Brochure 2019-20 PDFPrem Singhania0% (1)
- Edt ResumeDocument2 pagesEdt Resumeapi-282948725No ratings yet
- I2 CCommunication Protocol SpecificationsDocument3 pagesI2 CCommunication Protocol Specificationshiro1610tomNo ratings yet
- Trotsky in New York, 1917 - Portrait of A Radical On The Eve of Revolution - AvaxHomeDocument3 pagesTrotsky in New York, 1917 - Portrait of A Radical On The Eve of Revolution - AvaxHomeAntonio di SalieriNo ratings yet
- Zaha HadidDocument14 pagesZaha Hadidjanhavi28No ratings yet
- SWOT analysis of an educational institutionDocument8 pagesSWOT analysis of an educational institutionhashadsh100% (3)
- Information Technology (Subject Code 402) CLASS X (SESSION 2021-2022)Document12 pagesInformation Technology (Subject Code 402) CLASS X (SESSION 2021-2022)Tejas TajneNo ratings yet