Professional Documents
Culture Documents
PID e Sintonia PDF
Uploaded by
AlexandreEMC2Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
PID e Sintonia PDF
Uploaded by
AlexandreEMC2Copyright:
Available Formats
AES DE CONTROLE
1 Introduo
Embora exista uma infinidade de processos, com diferentes graus de dificuldade de
controle, as trs aes de controle: proporcional, integral e derivativa, aplicadas isolada
ou combinadamente permitem o controle da maioria dos processos de modo satisfatrio.
Aplicao de controladores:
P + I = 60 %
P = 25 %
P + I + D = 14 %
ON OFF = 0,5 %
No-linear = 0,5 %
A quase totalidade dos controladores possui o modo proporcional, a maioria possui o
modo integral e a minoria possui o modo derivativo.
O algoritmo de controle proporcional, integral e derivativo (PID) foi desenvolvido no incio
da implantao do controle, na dcada de 40 e resistiu heroicamente ao aparecimento
das novas tcnicas digitais e ainda hoje largamente usado, mesmo em sistemas de
controle com computadores digitais.
Ao Proporcional
A ao proporcional assim chamada porque a posio do elemento final proporcional
a amplitude do erro entre a medio e o ponto de ajuste.
A ao proporcional a ao corretiva do controlador que proporcional ao valor do
desvio entre a medio e o ponto de ajuste. uma ao de controle contnua, analgica,
uniforme. A sada do controlador proporcional a amplitude do erro.
Matematicamente, a sada do controlador proporcional puro, com apenas a ao de
controle proporcional, vale:
MV = MVo + kp.e
ou
MV = Mvo + 100 .e
BP
Onde
MV => sada instantnea do controlador ou varivel manipulada.
MVo => sada particular do controlador, quando o erro zero ou seja, quando a
medio igual ao ponto de ajuste.
kp => o ganho do controlador,
e => o erro entre a medio e o ponto de ajuste
BP => a banda proporcional do controlador.
Por definio, banda proporcional o erro percentual necessrio para que a sada de
controle varie de 0 a 100%. Uma banda proporcional igual a 50 significa que um erro de
50% levar a sada de controle para 100%, ou seja, ganho proporcional de 2,0.
Erradamente se pensa que a sada do controlador zero, quando o erro zero. Isto seria
impraticvel pois a sada zero implica em elemento final de controle 0% ou 100%.
O ponto de ajuste do controlador proporcional estabelecido para uma determinada
carga do processo.
Quando ocorre uma variao da carga do processo, a medio se afasta do ponto de
ajuste. O controlador sente o erro e produz um sinal de correo que ir aproximar a
medio nova do antigo ponto de ajuste. Porm, a nova medio nunca ser igual ao
ponto de ajuste, pois as condies do processo foram alteradas. H um desvio
permanente.
Quando a banda proporcional do controlador muito larga (ganho baixo), o controlador
pouco sensvel e haver um grande desvio permanente. Para diminuir o desvio
permanente deve se aumentar o ganho proporcional do controlador, tornando-o mais
sensvel. Pode-se pensar que a soluo para eliminar o desvio permanente o aumento
do ganho proporcional. Quando se aumenta o ganho proporcional alm de um
determinado limite, o processo oscila. A sada do controlador comea a variar segundo
uma senide, de modo aleatrio e independente do erro. Na prtica e na teoria,
impossvel se eliminar o desvio permanente com o controle proporcional. Para cada
processo existir um ajuste de ganho proporcional crtico (kpc) que produzir o mnimo
desvio permanente.
A ao proporcional instantnea; ela est em fase com o erro entre a medio e o
ponto de ajuste. Matematicamente, a ao proporcional independe do tempo. Em termos
prticos, a ao proporcional cuida de quanto deve ser corrigido, sem levar em
considerao o quando.
A desvantgem da ao proporcional que ela sempre deixa um desvio permanente (off
set) entre a medio e o ponto de ajuste.
O desvio permanente entre a medio e o ponto de ajuste deixado pela ao proporcional
, at certo ponto, inversamente proporcional ao ganho. Em valores muito altos e se o
controlador no possui as outras aes de controle, a malha de controle passa a oscilar
na freqncia natural do processo.
O formato da resposta da ao proporcional sempre igual e em fase com o formato do
distrbio. A resposta da ao proporcional ao degrau um degrau, com amplitude maior
(ganho maior que 1) ou menor (ganho menor que 1). Quando o distrbio uma rampa, a
ao proporcional correspondente tambm uma rampa, com inclinao funo da
banda proporcional e com a direo em funo da ao direta ou inversa do controlador.
Quando o erro uma senide, a ao proporcional uma senide em fase e com
amplitude funo do ganho proporcional.
Resposta em malha aberta ao degrau para o controlador proporcional.
Aplicao do controlador proporcional
O controlador com a ao proporcional isolada aplicado nos processos com pequena
variao da carga e em processos onde pode haver pequenos desvios da medio em
relao ao ponto de ajuste.
O controlador proporcional aplicado no controle de processo onde a estabilidade mais
importante que a igualdade da medio com o ponto de ajuste.
O nvel a varivel que tipicamente pode ser controlada apenas com a ao
proporcional.
Ao Integral
A ao integral proporcional integral, no tempo, do erro entre a medio e o ponto de
ajuste.
O erro que dura muito tempo para ser eliminado produz uma grande ao corretiva, o
erro de curta durao gera uma pequena ao integral de correo.
A ao integral uma ao de controle complementar ao proporcional. O seu
propsito o de prover a ao de controle adequada com as variaes da demanda ou
do suprimento do processo. Como estas variaes de carga do processo implicam na
existncia do desvio permanente deixado pela ao proporcional a ao integral
chamada de ao reset ou de reajuste. Ela elimina o erro residual, reajustando o valor da
medio igual ao ponto de ajuste.
A ao integral elimina o desvio permanente porm no elimina o pico do erro (overshoot)
desde que o pico ocorre antes que a ao integral comece a atuar. A ao integral,
quando associada a ao proporcional, comea atuar depois da ao proporcional; ela
est atrasada em relao a ao proporcional.
A ao integral est comumente associada a ao proporcional. A quantidade da ao
integral fornecida pelo controlador est diretamente ligada correo do modo
proporcional. A ao integral repete a ao proporcional dentro de um determinado
ERRO
SC ( P )
t
DE
Kp x DE
( % )
perodo de tempo. Essa ao repetida se processa continuamente at que a medio
fique igual ao ponto de ajuste.
A expresso matemtica da sada com a ao integral associada ao proporcional :
MV = MVo + kp._1_ e(t).dt
Ti
onde
Ti => o tempo integral,
e(t).dt => a integral do erro no tempo. Numa forma grfica, a integral a rea
sob a curva do erro e o eixo do tempo.
Muitos tcnicos fazem uma certa confuso entre ao integral e tempo integral, pois eles
so o inverso um do outro. O tempo integral (Ti ou Tr) o tempo que a ao integral leva
para alcanar ou repetir a ao proporcional. A ao integral (AI) a quantidade de vezes
que a ao proporcional repetida, na unidade de tempo. So disponveis controladores
com ajustes de ao integral (repetio por tempo) e em tempo integral (tempo por
repetio). Dimensionalmente, o correto para a ao integral deve ser o nmero de
repeties por unidade de tempo e para o tempo integral, a unidade de tempo por
repetio.
Na sintonia do controlador comum a eliminao temporria do efeito da ao integral e
portanto necessrio saber, a priori, como o ajuste do controlador. Quando o ajuste
da ao integral (repetio/tempo), elimina-se completamente a ao integral do
controlador ajustando-se o tempo integral no valor mnimo, idealmente igual a zero.
Quando o ajuste do tempo integral (tempo/repetio), elimina-se completamente a ao
integral ajustando-se o tempo integral no valor mximo, idealmente igual a infinito.
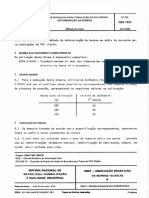
O grfico a seguir apresenta a resposta em malha aberta para um controlador com ajuste
das aes P+I.
Nesse grfico pode-se facilmente observar que a sada proporcional reposicionada
imediatamente, assim que passa a existir o "Delta E", enquanto que a contribuio da
ao integral passa a ser observada ao longo do tempo.
Resposta em malha aberta ao degrau para o controlador proporcional-integral.
t
Delta E
Ti
ERRO
SC ( P + I )
Kp x DE
Kp x DE
Componente
Integral
Componente
Proporcional
( % )
Representao da eliminao do erro pela atuao da ao integral.
Fisicamente, a ao integral uma realimentao positiva atrasada. Por ser
realimentao positiva, a adio da ao integral piora a estabilidade da malha de
controle. Quando se tem um controlador proporcional, com um determinado ganho
proporcional ajustado, a adio da ao integral requer a diminuio do ganho
proporcional, para manter a mesma estabilidade da malha. Quando o ajuste da ao
integral for tal que a realimentao positiva prevalece sobre a negativa ou anule a
negativa, haver a oscilao crescente ou no mnimo, a oscilao constante da varivel
controlada.
Saturao
A saturao do modo integral pode ocorrer nas seguintes situaes:
1. A ocorrncia de uma variao brusca e demorada, tipo degrau, entre a medio e o
ponto de ajuste da varivel de processo.
2. A carga do processo excede os limites da varivel manipulada.
3. A manipulao da varivel obstruda por uma falha de equipamento, como
desligamento de bomba, falta de energia, bloqueio da vlvula, emperro da haste da
vlvula etc.
4. O elemento final de controle atinge seus limites fsicos.
5. A existncia do processo batelada. Enquanto o processo ficar parado para a recarga e
o controlador ficar ligado em automtico, a medio zero, o ponto de ajuste finito e o
controlador vai variar a sada para inutilmente tentar fazer a medio subir para o ponto
de ajuste. O resultado dessa tentativa de controle a saturao da sua sada.
6. A vlvula de controle atuada por um controlador, selecionado entre os
controladores. Apenas h um controlador responsvel pelo controle e os outros (n-1)
controladores ficam em espera, inativos, com as sadas terminando no seletor de sinais.
Esses (n-1) controladores podem saturar suas sadas, se tiverem o modo integral.
t
_______________________________________________________________________
__
Exerccio de fixao 01
Para um dado controlador P+I (PI) tem-se os seguintes parmetros de sintonia:
kp = 2,0 e Ti = 3,0 min/rep.
Supondo que a malha esteja em automtico, mas a interligao controlador-elemento
final de controle esteja interrompida caracterizando uma malha aberta, e que o erro entre
a varivel de processo e o set point seja fixo em 5%, responda:
1.A. Qual ser a variao causada no sinal de sada do controlador aps 6 minutos?
2.A. Prove com os dados desse exemplo e as definies de tempo e ao integral, que
a ao integral desse controlador 0,333 rep/min.
_______________________________________________________________________
_
Ao Derivativa
A ao derivativa a ao corretiva proporcional derivada em relao ao tempo do erro
entre a medio e o ponto de ajuste. A ao derivativa detecta a variao do aumento ou
a diminuio do erro entre a medio e o ponto de ajuste e fornece uma sada
proporcional a esta taxa de variao. Ela discrimina o erro por sua variao. Para uma
variao repentina, mesmo de pequena amplitude, a ao derivativa gera um grande
sinal de correo; os erros lentos provocam uma pequena ao derivativa de correo.
Quando se tem um desvio tipo rampa, a resposta da ao derivativa um degrau. Por
este comportamento de se adiantar ao proporcional, a ao derivativa erradamente
chamada de ao antecipatria. A ao derivativa se NO se antecipa ao aparecimento
do erro. Quando aparece um erro e ele detetado pelo controlador, a ao derivativa
sente sua velocidade de variao e produz uma componente corretiva proporcional a esta
variao. A ao derivativa, na realidade, atrasa a resposta proporcional do controlador,
fazendo-o dar uma sada exagerada para variaes bruscas da medio. O grau de
exagero a taxa da ao derivativa e proporcional a velocidade de variao do sinal
medido.
A ao derivativa usada para apressar a ao corretiva do controlador. A sua incluso
porm complica e dificulta a sintonia do controlador, por causa das interaes com as
outras aes.
O tempo derivativo o tempo, em minutos, durante o qual a sada adiantar a sada do
controlador, durante uma variao na entrada tipo rampa. O tempo derivativo o tempo
que a ao proporcional leva para atingir a ao derivativa.
A ao derivativa expressa em unidade de tempo. Quanto maior o tempo derivativo,
maior a durao da ao, maior a ao derivativa. Quando se quer retirar a ao
derivativa do controlador, deve ser ajustar o tempo derivativo em zero. O que coerente
com a expresso da ao derivativa:
MV = Mvo + kp.Td.de/dt
onde
Td => o tempo derivativo.
de/dt => a taxa de variao ou derivada do erro no tempo.
A ao derivativa altera a amplitude do ganho proporcional, estreitando-a ou alargando-a,
variando a sensibilidade do controlador.
Geralmente a ao derivativa usada em conjunto com a ao proporcional, constituindo
tambm uma ao corretiva adicional. A ao derivativa usada na minoria dos
controladores, porque o ajuste mnimo disponvel maior que o requerido para a maioria
das malhas.
Quando aparece um distrbio no processo, o controlador P + I + D deteta o erro entre a
medio e o ponto de ajuste e atua no processo. Relativamente, a primeira ao a atuar
a derivativa, a segunda a proporcional e finalmente, a ltima a ao integral.
A ao derivativa realizada no controlador atravs de um atraso na realimentao
negativa. Durante um intervalo de tempo ajustvel, o controlador fica com o ganho
elevado. Por isso esta ao s aplicada em processo lento. tambm fcil de entender
que quanto maior o tempo derivativo, maior a ao derivativa. O ajuste da ao
derivativa em valor muito grande pode provocar oscilao no processo, pois o controlador
fica muito tempo sem a realimentao negativa.
Os componentes do circuito derivativo so os mesmos do integral, pois as funes
derivada e integral so inversas uma da outra. Apenas a posio relativa dos elementos
capacitivo e resistivo trocada.
Quando se tem um controlador proporcional mais integral mais derivativo em oscilao, a
causa da oscilao pode ser a banda proporcional muito estreita, o tempo integral muito
pequeno ou o tempo derivativo muito grande. Se a oscilao ocorre na freqncia natural
do processo a sua causa o ajusta da banda proporcional muito estreita, se a oscilao
ocorre em freqncia maior que a freqncia natural do processo, o motivo o ajuste do
tempo derivativo muito grande e finalmente, se a oscilao ocorre em freqncia menor
que a freqncia natural, o causador foi o ajuste do tempo integral muito pequeno.
Resposta em malha aberta rampa para o controlador proporcional-derivativo.
A resposta da ao derivativa ao degrau a funo impulso, que igual a zero quando a
entrada constante e que assume um valor altssimo na subida do degrau; teoricamente
infinito, quando o tempo de subida do degrau zero. Os matemticos chamam-na de
funo Dirac. Como freqente a alterao rpida do ponto de ajuste pelo operador de
processo, a maioria dos controladores eletrnicos e pneumticos possui o circuito da
ao derivativa atuando apenas na medio e no no erro entre a medio e o ponto de
ajuste. Nos controladores com ao derivativa sem esta caracterstica, o operador de
processo deve alterar suavemente o ponto de ajuste a fim de no provocar oscilao no
processo. Deve-se ter bem claro que a alterao do ponto de ajuste um distrbio para o
processo, pois houve alterao no ponto de operao desejado.
Quando aparece um distrbio no processo que provoca o afastamento da varivel
controlada do ponto de ajuste, o controlador tende a eliminar ou diminuir este desvio.
Assim a ao corretiva do controlador deve ser aplicada na mesma direo e no sentido
oposto ao erro. Isto significa dizer que a ao corretiva deve estar defasada de 180 graus
do erro ou ainda, que deve haver uma realimentao negativa. Apenas a ao
proporcional corrige o erro, porm deixa um erro residual. O objetivo da ao integral o
de eliminar este erro residual, gerando a ao corretiva e tornando a oposta ao erro. A
ao integral atrasa o sinal de correo. Quando ela insuficiente, ainda fica um
pequeno erro residual. Quando ela demasiada h oscilao porque h predominncia
da realimentao positiva. A adio da ao derivativa ajuda a tarefa de alinhar a ao
corretiva com erro. A ao derivativa adianta o sinal de correo. A ao proporcional
est relacionada com o ganho do controlador e as aes integral e derivativa com o
ngulo de fase da correo. Em resumo, a ao proporcional determina o quanto da ao
corretiva e as aes integral e derivativa estabelecem quando conveniente a aplicao
da correo, de modo que no haja desvio permanente e que a eliminao do erro seja a
mais rpida possvel.
O uso da ao derivativa permite o uso de uma menor banda proporcional (maior ganho),
de um menor tempo integral, para a mesma estabilidade. Menor banda proporcional
implica em menor erro de pico e menor erro acumulado.
Quando se aumenta a ao derivativa, aumenta-se o tempo derivativo, reduz-se o
overshoot da sada devido ao distrbio da carga mas a sada fica mais oscilatria.
Quando se aumenta muito a ao derivativa, a curva de sada no ultrapassa o ponto de
ajuste e a ao corretiva muito amortecida.
ERRO
SC ( P + D )
t
( % )
Td
Componente
Proporcional
Componente
Derivativo
Quando se aumenta ainda mais a ao derivativa, haver oscilao com um perodo de
oscilao menor que o natural do processo.
A quantidade de ao derivativa permitida para um processo com determinado tempo
morto diminui quando a constante de tempo caracterstico diminui (processo mais rpido).
Erradamente se acha que toda varivel lenta necessita da ao derivativa. A lentido da
varivel uma condio necessria, mas no suficiente para justificar a aplicao da
ao derivativa. O processo lento que sofre variao lenta da carga no necessita da
ao derivativa. Alis, a ao derivativa praticamente no responde a pequenas rampas
de erro. A ao derivativa no tem nenhum efeito no desvio permanente deixado pela
ao proporcional.
No se necessita usar a ao derivativa em processos rpidos, pois sua resposta j
rpida e o uso da ao derivativa provocaria certamente oscilao no sistema. No se
deve usar ao derivativa em processo com rudo, pois ela amplifica o rudo. O valor da
ao derivativa funo da quantidade de rudo. Processos com pequenas constantes de
tempo caractersticos (rpidos) tendem a ter mais rudo, desde que a atenuao do rudo
pelo filtro inversamente proporcional a constante do tempo caracterstico.
_______________________________________________________________________
__
Exerccio de fixao 02
Um algortmo PID est sendo utilizado para o controle de uma determinada temperatura
cuja faixa de medio 0 a 200 graus Celsius. Essa malha de controle opera em modo
automtico com boa resposta, graas aos seguintes parmetros:
Banda proporcional = 80%
Ao Integral = 1/30 rep/seg
Tempo Derivativo= 2,0 min
2.A. Para uma taxa de variao do erro de 2 graus / minuto, qual ser a variao de sua
sada DMV (delta MV) ?
2.B. Se para uma maior preciso na medio houve a necessidade de se alterar a faixa
do transmissor de 0 a 200 graus para 150 a 250 graus, qual seria a variao da sada do
controlador mantendo-se todos os outros dados, inclusive a taxa de variao do erro de 2
graus / minuto. Faa um comentrio sobre o resultado obtido em relao ao tem 2.A.
Controle das variveis de processo
Presso
A presso caracterizada pela grande capacidade, pequeno atraso de transferncia e
pequeno tempo morto. Por ter grande capacidade, pode-se ter auto-regulao do controle
de presso, desde que no haja vazo.
O tempo de resposta da presso rpida aproximadamente igual ao da vazo e o tempo
da presso lenta se aproxima do tempo do nvel. O exemplo de um processo com
presso rpida o controle da presso de um tanque, manipulando a vazo de sada do
vapor. O exemplo da presso lenta a manipulao da vazo da gua de resfriamento
na entrada do trocador de calor para controlar a presso do vaso de vapor. A dinmica da
transferncia do calor e o atraso da gua atravs do trocado influem no tempo de
resposta da malha de controle da presso.
Raramente se utiliza a ao derivativa para o controle de presso. O controlador tpico
para o controle de presso o P+I. A banda proporcional tipicamente maior que 100%
e o tempo integral pequeno.
Vazo
A vazo a varivel de processo com a resposta mais rpida e com a menor
capacitncia.
A vazo a varivel manipulada da maioria dos controles de outras variveis. Quando se
tem o controle da vazo, a coincidncia entre a varivel manipulada e a controlada torna
ainda mais fcil o controle.
A vazo entre dois pontos de uma tubulao com seo circular fechada gerada e
modificada pelas bombas e compressores, que produzem uma diferena de presso
entre eles. A vazo sempre vai do ponto de maior presso para o de menor presso. A
vazo sofre distrbios das conexes e acidentes da tubulao, da colocao de
elementos sensores e de vlvulas, de equipamentos tais como trocadores de calor.
Como a vazo possui pequena capacitncia e como a maioria dos lquidos no
compressvel, esses rudos provocados pelos distrbios no so amortecidos e se
transmitem por todo o sistema. Na escolha e nos ajustes do controlador, esses rudos da
vazo devem ser considerados. Como concluso, quase nunca se utiliza o modo
derivativo no controlador de vazo.
Se o fludo gs, est sujeito a expanso devido a variao da presso. Se o fludo
lquido, a inrcia fundamental: a vazo comea com acelerao e termina com
desacelerao.
No controle de vazo, a vlvula de controle geralmente colocada depois do medidor de
vazo, para se evitar que os distrbios provocados pela ao da vlvula afetem a
medio da placa de orifcio. Devem ser respeitadas as distncias mnimas de trecho reto
antes e depois do medidor. Os distrbios provocados a jusante do medidor so menores
do que os provocados a montante.
Por causa dos vrios elementos dinmicos associados a medio de vazo, o ganho
dinmico da malha de medio, incluindo a tubulao, o transmissor, o controlador e o
atuador da vlvula muito grande e o ganho a ser ajustado no controlador deve ser
baixo, raramente superior a 1.
No controle de vazo os modos usados so proporcional e o integral, para no permitir
desvios permanentes. Nunca se utiliza o modo derivativo, por causa dos rudos
presentes. Ou ento, possvel a utilizao ao derivativa inversa, que amortece esses
rudos e permite o uso do controlador com banda proporcional mais estreita.
O controlador tpico para a vazo o P+I, com a ganho proporcional tpico de 0,4 a 0,7,
para reduzir o efeito dos rudos da vazo. O tempo integral pequeno, tpico de 0,15 a
0,50 minuto / repetio para eliminar rapidamente o desvio permanente.
Nvel
O nvel est associado ao parmetro capacidade, que o mais fcil de ser controlado.
O nvel de um lquido no tanque a integral da sua vazo de entrada.
A grande vantagem do controle de nvel de lquido a possibilidade de se ter sistema
auto- regulante.
O nvel de lquido pode apresentar rudos, provocados pelas ondulaes da face lquida.
Essas ondulaes podem ser eliminadas ou diminudas, mecanicamente na instalao do
transmissor ou pela escolha de filtros para o sinal de entrada do controlador.
O nvel a varivel de processo com diferentes graus de dificuldade. H nveis fceis de
serem controlados , com grande capacidade e pequena demanda. H nveis difceis de
serem controlados. O controle de nvel com grande capacidade pode ser executado
inclusive com controle liga-desliga.
Quando se requer um controle mais rigoroso utiliza-se o controlador proporcional e
finalmente, quando no admissvel a ocorrncia de desvios, utiliza-se a ao integral.
Raramente usada a ao derivativa.
O controlador tpico para o nvel o proporcional puro, que fornece um controle do nvel
mdio, que pode variar entre os valores mximo e mnimo, sem problemas. A banda
proporcional ajustada no valor tpico de 00%, de modo que a sada do controlador varia
de 3 a 15 psig, quando a sada do transmissor de nvel varia de 3 a 15 psig.
Temperatura
No h malha de controle de temperatura tpica. A temperatura outra varivel, como o
nvel, que apresenta diferentes graus de dificuldade de controle. Os problemas do
controle de temperatura se referem a transferncia de calor, como a radiao, a
conduo e a conveco.
A varivel temperatura est associada ao tempo morto, o parmetro de difcil controle.
Ela caracterizada por pequena velocidade de reao e por diferentes capacidades,
embora o mais freqente seja sistema de temperatura com grande capacidade.
A temperatura usualmente lenta por causa dos atrasos do sensor e dos atrasos da
transferncia de calor. A colocao do elemento sensor de temperatura em lugar
estagnado e de baixa velocidade imprestvel.
Os processos de temperatura com grande capacidade, pequeno atraso de transferncia e
pequeno tempo morto, podem ser controlados com os modos liga-desliga. Os fornos
eltricos, os fornos de tubos radiantes, as fornalhas com chama aberta, os banhos de
temperatura, so exemplos tpicos de sistemas que podem ser controlados
satisfatoriamente com o controlador liga-desliga.
Como refinamento pode se aplicar o controle liga-desliga com intervalo diferencial ou
ainda o controle com trs nveis de energia. Tem-se o controle liga-desliga com posies
mltiplas: alto, baixo, e desligado. Essa aplicao se refere a sistema de temperatura
que requer alta energia de aquecimento apenas no principio e depois requer baixa
energia para a manuteno da temperatura de trabalho. No incio da operao, o sistema
opera em alta energia, com todas as resistncias ligadas. Quando o sistema atinge a
temperatura desejada, ele desliga um conjunto de resistncias e passa a operar em duas
posies, convencionalmente.
Para resultados mais precisos, utilizado o controlador proporcional. O controle
proporcional se aplica a sistema com elevada velocidade de reao, que provocaria
grandes flutuaes no sistema liga-desliga. O controle proporcional utilizado em fornos
com queima de leo, em que a relao leo-ar controlada.
O controle proporcional tambm aplicado a sistema que apresenta grande variao de
carga. Nessa aplicao a banda proporcional deve ser estreita, a fim de ter pequenos
desvios permanentes. Porm, a banda proporcional deve ser larga para tornar o sistema
pouco sensvel aos tempos de atraso da medio da temperatura. Para conciliar essas
exigncias, necessria o uso da ao derivativa.
No controle de temperatura, a capacidade do lado da carga deve ser maior que a
capacidade do lado do suprimento. Uma grande capacidade de carga favorvel, desde
que ela diminui e nivela as variveis do processo. Por isso muito fcil um controle de
trocador de calor ou de forno, completamente carregado do que com pequena carga.
Usa-se sempre a modo integral associado ao proporcional quando h atraso na medio
e quando a carga varia e frequentemente. Como o uso da ao integral piora a resposta
dinmica do controlador, geralmente aconselhvel o uso tambm da ao derivativa,
que melhora a resposta dinmica.
A maioria dos controladores P+I+D usada em malhas de temperatura e a maioria das
malhas de temperatura requer o controlador P+I+D. Os ajustes da banda proporcional
so em valores estreitos (menor que 100%) dependendo da faixa do transmissor e do
tamanho da vlvula. O tempo integral da mesma ordem que o perodo natural do
processo, ou seja, quanto mais rpido o processo, menor o tempo integral ajustado. O
tempo derivativo deve ser ajustado em cerca de 1/4 do perodo natural do processo,
dependendo do nvel do rudo.
A concluso mais importante no estudo do controle de temperatura que a temperatura
uma varivel extremamente complexa e dependente dos fatores termodinmicos, de
transferncia de calor, de funes no-lineares, de tempo morto. muito freqente a
utilizao do sistema de controle, com mais de um controlador para o conjunto executar
um controle mais avanado, tipo cascata, faixa dividida, controle programado, controle
auto-seletor.
Sintonia do Controlador
O processo industrial modifica uma mateira prima em um produto acabado, atravs de
um balano entre o suprimento de produtos e energia e a demanda, tambm de produtos
e de energia, durante um determinado perodo de tempo. Na prtica, nenhum processo
igual a outro. Os processos apresentam as caractersticas tpicas, quanto a sua carga,
seus suprimentos, transporte de materiais, transferncia de energia, quantidade e
qualidade dos suprimentos de energia. Em outras palavras, cada processo apresenta um
inerente grau de dificuldade para ser controlado automaticamente. Levando em
considerao esses diferentes graus de dificuldade de controle, resultantes de diferentes
caractersticas dinmicas e estticas do processo, os fabricantes de instrumentos
desenvolveram diferentes tipos de controladores.
As trs aes fundamentais que podem ser combinadas na realizao do controlador
prtico so a proporcional, a integral e a derivativa. O controlador liga-desliga
descontnuo pode ser considerado um caso particular do controlador proporcional, com
um ajuste extremado. Como conseqncia, os controladores comercialmente disponveis
so o proporcional (P), o proporcional e integral (P+I), o proporcional e derivativo (P+D), o
proporcional e integral e derivativo (P+I+D). So usados ainda os controladores especiais
e de uso raro, como o integral (I), o P+I no-linear P+I+D no-linear, o P+I para batelada
e o P+I+D para batelada.
O pequeno nmero de controladores existente suficiente para o controle satisfatrio da
maioria absoluta dos processos envolvidos. Para uma determinada aplicao de controle
de processo, alm da escolha do controlador mais conveniente, necessrio o ajuste
adequado desse controlador.
O processo determina o tipo de controlador a ser escolhido, principalmente, os seus
ajustes. Os processos diferentes podem ter controladores diferentes e os processos
diferentes podem ter o mesmo tipo de controladores com ajustes diferentes.
O controlador mal escolhido raramente desempenha a funo desejada. O controlador
escolhido corretamente, tambm no funcionar idealmente, a no ser que os ajustes da
ao proporcional, ao integral e ao derivativa sejam aqueles exigidos pelo processo
especifico. Os ajustes insuficientes ou exagerados podem, na melhor situao, produzir
um controle demorado e fora do ponto de ajuste e na pior hiptese, provocar oscilao da
varivel controlada.
Sintonizar o controlar ajustar os valores das suas aes de controle. Com a sintonia
ideal, obtem-se o mximo potencial da malha e pode se estimar o erro do controlador.
A maioria dos trabalhos publicados e disponveis utiliza as tcnicas matemticas
avanadas, como a transformada de Laplace, a transformada Z, a funo de
transferncia, que no so dominadas pelos tcnicos ou que j foram esquecidas pelos
engenheiros. Pior ainda, a complexidade do emaranhado matemtico das tcnicas faz
perder o sentimento dos aspctos prticos e a viso dos objetivos reais do controle.
Embora a teoria possa determinar os valores exatos a seres ajustados no controlador, os
mtodos tericos aso de difcil execuo, pois os dados necessrios para os clculos
tericos so imprecisos. Por isso, os mtodos mais usados so empricos e para sua
execuo, necessrio se provocar pequenos distrbios ao processo, para se medir a
resposta a esses distrbios. Isso indesejvel, pois h processos crticos que no
permitem perturbaes.
Na prtica, os instrumentistas fazem a sintonia do controlador por tentativa e erro, sem a
convico do que esteja fazendo e sem nenhum suporte terico.
Aqui sero mostradas as relaes matemticas simples e necessrias para suportar as
regras de bolo (thumb rules) praticas criadas por J.G. Ziegler e N.B. Nichols,
popularizadas par F.G. Shinskey e documentadas por P,W. Murrill. Os conceitos
apresentados so suficientemente simples para que possamos entender o seu significado
prtico e suficientemente rigoroso e coerente com a teoria matemtica.
A condio necessria e suficiente para que o sistema de controle seja estvel que:
1. o ganho total do sistema seja menor que 1.
2. o ngulo de fase seja igual a 180 graus.
(Teoricamente existe uma outra condio alternativa de estabilidade: ganho total do
sistema igual a 1 e angulo de fase menor que 180 graus. Existe at tcnica de sintonia
de malha baseada nesta condio de estabilidade, porem, ela no ser considerada aqui
e agora).
Quando se conhece as caractersticas do processo, como o tempo morto e sua constante
de tempo, os valores dos ajustes do ganho proporcional, dos tempos integral e derivativo,
so facilmente determinados. Na prtica de instrumentao, difcil de se conhecer
rigorosamente esses parmetros do processo.
A sintonia do controlador uma operao que deve ser feita com o processo em regime
permanente, na condio mais provvel de operao, depois que todas as condies do
projeto tenham sido cumpridas, os equipamentos instalados e os instrumentos calibrados.
Quando a malha de controle sofre modificao, como por exemplo, a alterao da faixa
de medio, a colocao ou a retirada da extrao de raiz quadrada, a modificao da
caracterstica da vlvula de linear para igual percentagem, a colocao ou a retirada do
posicionador da vlvula, mesmo que o processo continue estvel para aquela
determinada condio, as suas margens de ganho e de fase foram alteradas e a malha
deve ser resintonizada.
A sintonia da controlador envolve os ajustes do ganho proporcional, do tempo integral e
do tempo derivativo. O ajuste da banda proporcional equivale ao ajuste do ganho do
controlador. Os ajustes do tempo integral e do tempo derivativo implicam no atraso e/ou
adiantamento da ao corretiva. Estes ajustes equivalem aos ajustes do ngulo de fase
da ao corretiva.
A maioria dos mtodos tericos e empricos de sintonia do controlador estabelece o
ganho total da malha igual a 0,50, equidistante do zero (no h controle) e um (controle
instvel). Com este ganho de 0,50 as oscilaes do sistema aso amortecidas numa razo
de 4 : 1 (os tericos sabem e gostam de demonstrar isso matematicamente).
Pode se chegar facilmente a estes ajustes, mesmo sem instrumentos de medio,
ajustando-se inicialmente o controlador para estabelecer o ganho total igual a 1 e depois
ajustando-o pela metade. O ganho igual a 1 facilmente realizvel pois tem-se a
oscilao constante da varivel controlada. O operador de processo pode verificar
facilmente quando a medio oscila entre dois limites fixos, sem necessidade de
instrumento adicional de teste. Na prtica, difcil detectar diretamente um
amortecimento da varivel medida de 4 para 1.
Os ajustes finais da sintonia do controlador um compromisso entre os desempenhos do
controlador em regime (freqncia zero) ou dinmica (altas freqncias).
Critrios de Sintonia
Os mtodos mais conhecidos, terica e experimentalmente, so os seguintes:
1. relao de amortecimento de 4:1
2. integral mnima do quadrado do erro (IQE)
3. integral mnima do erro absoluto (IEA)
4. integral mnima do tempo e do erro absoluto (ITEA).
O primeiro critrio, relao de amortecimento de 4:1, tem a vantagem de ser facilmente
medido, desde que se baseia em somente dois pontos da resposta. Inclusive, h outros
mtodos com outros nomes e outros procedimentos, porm, por inverso de passos,
constituem o mesmo mtodo.
Os outros trs critrios so mais precisos, porm de difcil concretizao prtica.
Outro enfoque para as tcnicas de sintonia dizer que h duas categorias distintas para
a sintonia do controlador:
1. mtodo dinmico, baseado nos parmetros determinados pela resposta da malha
fechada do sistema, com o controlador em automtico.
2. mtodo esttico, baseado nos parmetros estticos determinados pela curva de
resposta da malha aberta. Malha aberta aquela sem o controlador e dela se obtm a
curva de reao do processo. Esses mtodos so difceis, pois os dados a serem
levantados so imprecisos.
Mtodo da oscilao amortecida
um mtodo introduzido por Harriot. Consiste nos seguintes passos:
1. Colocao do controlador em automtico.
2. Eliminaao das aes integral (ajuste de Ti infinito) e derivativa (ajuste do Td zero).
3. Com um ganho arbitrrio, provocao de uma pequena variao, tipo degrau e
observao da resposta.
4. Ajuste da banda proporcional da controlador de modo a se obter uma curva de
resposta com amortecimento de 1/4 ou de 4:1. Amortecimento de 1/4 significa que a
amplitude de uma oscilao vale cerca de 4 vezes a amplitude da oscilao seguinte.
Quando se tem uma oscilao decrescente e se tomam dois picos consecutivos, a
amplitude do primeiro pico 4 vezes maior que a amplitude do segundo pico. O pico
seguinte atenuado por um fator de 4.
5. Ajustar os modos integral e derivativo, de modo que:
TI = O,667 P
Td = O,167 P
onde P o perodo de oscilao para o ganho que provoca a atenuao 4:1
As desvantagens desse mtodo de sintonia so:
I. o mtodo da oscilao amortecida de tentativa e erro, portanto, requer pacincia e
experincia.
2. o mtodo requer uma perturbao ao processo.
Mtodo Final
Foi um dos primeiros mtodos a serem desenvolvidos e o foi em 1942, por Ziegler e
Nichols. chamado mtodo final porque o seu uso requer a determinao do ganho e do
perodo finais. chamado ganho final, Gf, o mximo do valor ganho permissvel para o
controlador, com apenas o modo proporcional, para o sistema permanecer estvel.
O perodo final, Pf, o perodo da oscilao da resposta com o ganho ajustado em Gf.
Os procedimentos do mtodo de sintonia final so:
1. Colocao das aes integral e derivativa em zero, deixando o controlador
proporcional: Ti infinitivo e Td zero.
2. Colocao do controlador em automtico.
3. Provoque uma pequena perturbao ao processo, variando o ponto de ajuste
rapidamente e durante um pequeno intervalo de tempo. Deve se observar o
comportamento da medio da varivel controlada.
4. Repete-se o passo seguinte, alterando sucessivamente o ganho proporcional do
controlador, at obter uma oscilao constante na medio. Esse ponto correspondente
ao ponto de ganho igual a um. O processo est no limite de sua instabilidade. Anotam-se
os valores da banda proporcional e do perodo de oscilao.
5. Finalmente, ajustam-se os valores dos parmetros do seguinte modo:
a) Para controlador P => dobra-se o valor da banda proporcional, ou divide-se por 2 o
ganho:
BP = 2.BPc
ou
G = 0,5.Gc
onde
BP => a banda proporcional final a ser ajustada no controlador.
BPc => a banda proporcional que provoca oscilaes constantes.
G => o ganho final, a ser ajustado no controlador.
Gc => o ganho que corresponde ao processo com oscilaes no atenuadas nem
crescentes, mas com amplitudes constantes.
Quando se usa o modo integral associado ao modo proporcional, deve-se aumentar a
largura da banda proporcional. Os valores a serem ajustados no controlador P + I so:
BP = 2,2, BPc
Ti = 0,83 Pc
onde Pc o perodo da oscilao permanente.
Finalmente, quando o controlador possui os trs modos de controle, P + I + D, os ajustes
so:
BP = 1,67.BPc
Ti = 0,5.Pc
Td = 0,125.Pc
Note-se que a introduo da ao derivativa possibilitou o estreitamente da banda
proporcional (aumento do ganho), portanto, o melhoramento da sensibilidade do
controlador. A ao derivativa permite tambm, uma maior ao integral ao controlador.
As desvantagens desse mtodo de sintonia so as mesmas que o mtodo anterior. Alis,
calcular a banda proporcional que provoca oscilaes com amplitudes constantes e
dobrar essa banda proporcional, na realidade, tambm provoca amortecimento de 4:1.
Como o mtodo anterior, o mtodo do ponto final:
1. um mtodo iterativo, de tentativa e erro, que consome tempo e requer pacincia e
habilidade.
2. Tambm provoca distrbio ao processo.
Mtodo da Estabilidade Limite:
O roteiro prtico para a sintonia do controlador proporcional o seguinte:
1. manualmente, atua-se no processo para que a sada do controlador fique em 50%.
2. com o processo estabilizado, operando na condio mais comum e com o controlador
em automtico, ajusta-se a banda proporcional no valor mximo. Provoca-se uma
pequena variao (cerca de I% a 2%) no ponto de ajuste e observa-se a resposta do
controlador. Como ele esta com o ganho quase zero ele praticamente no responde ao
distrbio e o erro quase no corrigido.
3. diminui-se a banda proporcional e provoca-se novamente uma pequena variao
no ponto de ajuste. Agora o controlador j responde melhor ficando um desvio
permanente menor.
4. diminui-se sucessivamente a banda proporcional e provoca-se se um pequeno
distrbio no ponto de ajuste. O desvio permanente diminui cada vez mais, at atingir um
valor limite.
chega-se a uma banda proporcional que provoca uma oscilao senoidal estvel, com
amplitude mxima constante. Este o ponto de ganho total igual a 1. O processo est
oscilando na sua freqncia natural. (No se deve confundir o ganho total do sistema
com o ganho do controlador. O ganho do controlador pode ser ajustado tipicamente entre
5 e 0,2).
observa se no dial qual o valor da banda proporcional que provocou a oscilao constante
e ajusta-o no dobro deste valor. Matematicamente, quando se dobra a banda, divide-se
pela metade o ganho do controlador. O ganho total da malha fechada igual a 0,50.
quando se provocar um novo distrbio no ponto de ajuste o processo ir responder com
uma oscilao com taxa de amortecimento de 4 para 1.
Quando se tem o controlador P + I, o procedimento quase o mesmo, com as seguintes
diferenas:
Inicialmente deve ser retirar toda a ao integral do controlador, ajustando-se o dial no
mximo se os ajustes so em tempo por repetio ou em zero, se so em repetio por
tempo.
Quando se atingir a oscilao constante, provocada por um ajuste crtico da banda
proporcional, deve medir e anotar o perodo de oscilao, alm da banda proporcional. O
ajuste do tempo integral deve ser funo deste tempo correspondente ao perodo natural
de oscilao do processo. Este perodo deve ser anotado no controlador para uso futuro,
para distinguir a causa de uma eventual oscilao.
Os ajustes do controlador agora so tambm diferentes. A adio da ao integral tornou
o controlador menos estvel, ou mais sensvel. Para compensar isso, o ajuste da banda
proporcional deve ser mais conservador. Ento, em vez de ajustar a banda proporcional
em 2,0 vezes o valor da banda que provocou a oscilao constante, ajusta-se, por
exemplo, em 2,2 vezes o valor da banda proporcional crtica, o que corresponde a um
ganho total de aproximadamente 0,45. Neste caso, para a mesma margem de ganho,
tem-se um ganho do controlador menor. O tempo integral ajustado em 0,50 o perodo
natural de oscilao do processo.
Finalmente, quando se tem um controlador proporcional mais integral mais derivativo, a
filosofia a mesma, exceto no seguinte:
1. a adio da ao derivativa torna o controlador mais estvel que o P+I e at que o P
puro.
Por isso o ajuste definitivo da banda proporcional pode ser menor que 2 vezes a banda
proporcional crtica. Tipicamente, ajusta-se a banda proporcionalmente 1,80, o que
corresponde a um ganho total aproximado de 0,55. Neste caso, para a mesma margem
de ganho, tem-se um ganho do controlador maior.
O tempo integral ajustado para 0,67 do perodo natural e o tempo derivativo ajustado
em 0,125 do perodo natural de oscilao do processo.
Esta flexibilidade e este grau de liberdade em escolher os valores de sintonia do sistema
de controle permitem que haja vrios valores diferentes para os ajustes do controlador,
tais como os de Ziegler & Nichols, de Murril & Smith, de Cohen & Coon e de Shinskey.
Mtodo da curva de reao do processo
A partir da curva de resposta transitria do processo a um degrau, traando-se uma
tangente ao ponto de operao, obtem-se o tempo morto e a constante de tempo do
processo. A partir do tempo morto (tm) e do tempo caracterstico - constante de tempo do
processo (tc), so feitos os seguintes ajustes:
Controlador P + I:
Kp = 0,90.tc/(Gp.tm)
Ti = 3,33.tm
Controlador P + I + D:
Kp = 1,2.tc/(Gp.tm)
Ti = 2,0.tm
Td = 0,5 t
A partir da relao do tempo morto e do perodo de oscilao natural do processo conclui-
se que os ajustes esto de conformidade com o mtodo da estabilidade limite.
Resposta em Freqncia do Processo
O mtodo de sintonia baseado na resposta em freqncia do processo usa as margens
de ganho e de fase diretamente. Uma tcnica sugere:
I. selecionar uma taxa de amortecimento, por exemplo, de 4 para 1.
2. igualar o tempo da ao integral ao perodo natural de oscilao da sistema.
3. fixar o tempo da ao derivativa de modo a se ter o mximo ganho do controlador
tendo-se a taxa de amortecimento de 4 para 1 e tempo integral igual ao perodo natural.
Comparao e Concluso
No adiantaria maior rigor e preciso nestes ajustes quando se botes e dials de ajuste
com impreciso maior que 10%, como os disponveis nos controladores eletrnicos e
pneumticos existentes.
Felizmente a impreciso do menor que um permite ajustes em valores aproximados que
funcionam na prtica.
Dos trs mtodos de sintonia do controlador, o da estabilidade limite o melhor por ser o
mais rpido e conveniente para as condies normais do processo.
Qualquer que seja o mtodo escolhido, porm, os distrbios devem ser considerados,
quando se determinam os ajustes.
1. distrbios de baixa freqncia ou lentos, usar ganho alto e ao integral grande.
2. distrbios de alta freqncia ou rpidos, usar ganho baixo, ao integral pequena e
ao derivativa pequena (ou nem usar ao derivativa, pois esta ao apresenta
problema com rudo).
O processo com grande tempo morto difcil de ser controlado e sintonizado. Um
procedimento prtico, mas ainda demorado e tedioso, para processo com tempo morto
no exagerado e desde que se conheam antecipadamente o processo :
1. ajustar o ganho do controlador em zero, o tempo integral no mximo e o tempo
derivativo em zero.
2. aumentar gradativamente o ganho do controlador at aparecer oscilao com pequena
amplitude e com desvio permanente entre medio e ponto de ajuste.
3. diminuir gradativamente o tempo integral do controlador at eliminar o desvio
permanente e at aparecer uma pequena oscilao de baixa freqncia, provocada pela
ao integral e no pela ao proporcional.
4. aumentar por degrau o tempo derivativo at eliminar a oscilao. Quando acabar a
oscilaro, repetir (2) e (3), at que o aumento do tempo derivativo no consiga mais
eliminar a oscilao.
You might also like
- 9.22 Teste Seus Conhecimentos_ Revisão Da TentativaDocument7 pages9.22 Teste Seus Conhecimentos_ Revisão Da Tentativacarlos.alexsander.benitezNo ratings yet
- Modulo - Saude Publica e AmbienteDocument224 pagesModulo - Saude Publica e AmbienteSérgio SaguarNo ratings yet
- Orientações de Estudo - Tema 2Document2 pagesOrientações de Estudo - Tema 2Fernando SimõesNo ratings yet
- Ufologia - Uma Pesquisa CientíficaDocument295 pagesUfologia - Uma Pesquisa CientíficaAli Onaissi100% (1)
- Notebooks - Curso de Engenharia Dos NotebooksDocument3 pagesNotebooks - Curso de Engenharia Dos Notebooksze ziNo ratings yet
- Liderança: estilos e definição emDocument28 pagesLiderança: estilos e definição emGabriela Ramos100% (3)
- Bastide e Verger Entre"áfricas" E"brasis": Rotas Entrelaçadas, Imagens SuperpostasDocument19 pagesBastide e Verger Entre"áfricas" E"brasis": Rotas Entrelaçadas, Imagens SuperpostasSandrãoStaelNo ratings yet
- Resolução Macro UEA 2018 - ExatasDocument18 pagesResolução Macro UEA 2018 - ExatasVALTERVIEGAS1No ratings yet
- 1 - Noções de Oceanografia e MeteorologiaDocument59 pages1 - Noções de Oceanografia e MeteorologiaFabio AlmeidaNo ratings yet
- PDF Ars Magica 5e Fastplay PDF CompressDocument24 pagesPDF Ars Magica 5e Fastplay PDF CompressJoão CavalcantiNo ratings yet
- Questão: 63550Document228 pagesQuestão: 63550Wagner Ribeiro LuizNo ratings yet
- Edital GCUB ProAfri 001 2021Document11 pagesEdital GCUB ProAfri 001 2021LucioDercioNo ratings yet
- Determinação da dureza de anéis de borracha para tubulação de PVC rígidoDocument2 pagesDeterminação da dureza de anéis de borracha para tubulação de PVC rígidoJúlio César PestanaNo ratings yet
- Tribunal julga indenização por alimento contaminadoDocument11 pagesTribunal julga indenização por alimento contaminadoManuela RibeiroNo ratings yet
- Intercultura e Educação (Reinaldo Matias Fleuri) PDFDocument20 pagesIntercultura e Educação (Reinaldo Matias Fleuri) PDFErwan MorelNo ratings yet
- Impostos em Moçambique: Fases do IRPS, IRPC, ISPC, IVA, SISA e IPMDocument13 pagesImpostos em Moçambique: Fases do IRPS, IRPC, ISPC, IVA, SISA e IPMDalton Caputene0% (1)
- São João Do CaririDocument8 pagesSão João Do CaririDarisCorreiaNo ratings yet
- Processos de extração de óleos essenciaisDocument30 pagesProcessos de extração de óleos essenciaisAnderson LuizNo ratings yet
- Ferida Cirúrgica PDFDocument5 pagesFerida Cirúrgica PDFLucilene santosNo ratings yet
- Relações Jurídicas Fiscais e Obrigações Fiscais em MoçambiqueDocument12 pagesRelações Jurídicas Fiscais e Obrigações Fiscais em MoçambiqueAlexandre PereiraNo ratings yet
- Lamina MP 4200 TH AdvDocument2 pagesLamina MP 4200 TH AdvMarco Antonio CirqueiraNo ratings yet
- O segredo da raposaDocument8 pagesO segredo da raposaRosana GuiducciNo ratings yet
- HvacDocument6 pagesHvacAndrey FurquimNo ratings yet
- Resumo Dos Tempos Verbais em InglêsDocument1 pageResumo Dos Tempos Verbais em InglêsAriana MartinsNo ratings yet
- D32 (9º ANO - Mat.) - Blog Do Prof. WarlesDocument10 pagesD32 (9º ANO - Mat.) - Blog Do Prof. WarlesKeylla SantosNo ratings yet
- Potencia 2022Document29 pagesPotencia 2022ANANo ratings yet
- SuspensõesDocument3 pagesSuspensõesRaquelNo ratings yet
- Tipos de saberes e como distinguí-losDocument17 pagesTipos de saberes e como distinguí-losLucasNo ratings yet
- Fispq Hepta Clean RSDocument8 pagesFispq Hepta Clean RSAlexandre StahlschmidtNo ratings yet
- LX 300Document9 pagesLX 300dangiojauNo ratings yet