Professional Documents
Culture Documents
A Mechatronika Alapjai
Uploaded by
nrichardlCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
A Mechatronika Alapjai
Uploaded by
nrichardlCopyright:
Available Formats
Horvth Pter
A MECHATRONIKA ALAPJAI
Kszlt a HEFOP 3.3.1-P.-2004-09-0102/1.0 plyzat tmogatsval.
Szerz: dr. Horvth Pter
egyetemi docens
Lektor: dr. Huba Antal
egyetemi docens
Horvth Pter, 2006
A mechatronika alapjai A dokumentum hasznlata
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata
Mozgs a dokumentumban
A dokumentumban val mozgshoz a Windows s az Adobe Reader meg-
szokott elemeit s mdszereit hasznlhatjuk.
Minden lap tetejn s aljn egy navigcis sor tallhat, itt a megfelel
hivatkozsra kattintva ugorhatunk a hasznlati tmutatra, a tartalomjegy-
zkre, valamint a trgymutatra. A
s a
nyilakkal az elz s a kvet-
kez oldalra lphetnk t, mg a Vissza mez az utoljra megnzett oldalra
visz vissza bennnket.
Pozcionls a knyvjelzablak segtsgvel
A bal oldali knyvjelz ablakban tartalomjegyzkfa tallhat, amelynek
bejegyzseire kattintva az adott fejezet/alfejezet els oldalra jutunk. Az
aktulis pozcinkat a tartalomjegyzkfban kiemelt bejegyzs mutatja.
A tartalomjegyzk hasznlata
Ugrs megadott helyre a tartalomjegyzk segtsgvel
Kattintsunk a tartalomjegyzk megfelel pontjra, ezzel az adott fejezet
els oldalra jutunk.
Keress a szvegben
A dokumentumban val keresshez hasznljuk megszokott mdon a
Szerkeszts men Keress parancst. Az Adobe Reader az adott pozci-
tl kezdve keres a szvegben.
A mechatronika alapjai Tartalomjegyzk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
Tartalomjegyzk
1. Mi a mechatronika? ........................................................................ 6
1.1. Defincik ..................................................................................................... 6
1.2. A mechanikus rendszerek fejldsnek lpsei ....................................... 8
1.3. A mechatronikai berendezsek tulajdonsgai ........................................ 15
1.4. A mechatronikai rendszer felptse ....................................................... 16
1.5. A mechatronika rszterletei.................................................................... 17
1.6. Mikor clszer a mechatronika alkalmazsa?......................................... 19
2. Jelek s feldolgozsuk .................................................................. 23
2.1. Jelek felosztsa............................................................................................ 23
2.2. A jelek fontosabb jellemzi ...................................................................... 24
2.3. Jelformls .................................................................................................. 25
3. Mechatronikai berendezsek irnytsi rendszere....................... 33
3.1. Az irnytsi rendszer szintjei ................................................................... 33
3.2. A vezrlsi/szablyozsi szint.................................................................. 34
4. A mechatronika mechanikai alapjai............................................. 43
4.1. Kinematikai alapok.................................................................................... 43
4.2. Kinetikai alapok ......................................................................................... 49
5. Szenzorok s aktutorok fizikai alapjai........................................ 66
5.1. Mgnessg a mechatronikban ................................................................ 66
5.2. A fny mechatronikai alkalmazsa........................................................... 84
5.3. A hang alkalmazsa.................................................................................... 95
5.4. Egyb fizikai hatsok............................................................................... 102
6. Szenzorok ....................................................................................105
6.1. A szenzorok irnt tmasztott kvetelmnyek...................................... 105
6.2. A szenzorok ltalnos felptse............................................................ 106
6.3. A kzvetett mrs elve............................................................................ 107
6.4. Szenzorok jellemzi................................................................................. 113
6.5. A linearitssal sszefgg krdsek....................................................... 119
A mechatronika alapjai Tartalomjegyzk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
7. Aktutorok...................................................................................130
7.1. Aktutorok felptse .............................................................................. 130
7.2. Az aktutorokkal szemben tmasztott kvetelmnyek ...................... 132
7.3. Aktutorok statikus jelleggrbi ............................................................ 132
7.4. Elektromechanikus pozcionl hajtsok............................................. 134
7.5. Fluid aktutorok....................................................................................... 138
7.6. jszer aktutorok................................................................................... 139
7.7. Aktutorok alkalmazsi kre.................................................................. 142
8. Mozgs-talaktk a mechatronikban.......................................144
8.1. Gpcsoport munkapontja....................................................................... 144
8.2. Mozgs-talaktk felosztsa .................................................................. 146
8.3. Az tttel, mint az talakt jellemzje ................................................. 151
8.4. Mozgs-talaktk hatsfoka .................................................................. 156
8.5. Az tttel optimlis megvlasztsa ........................................................ 159
Rvidtsek.......................................................................................................... 163
Irodalom.............................................................................................................. 164
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
1. Mi a mechatronika?
A XX. szzad msodik felben a szmtgpek s az informcitechnika
rohamos fejldse, a kapcsold mrnki terletekre gyakorolt hatsa j
fogalmat hozott ltre: a mechatronikt. A mikroprocesszor bevezetse a
80-as vek elejn, az j berendezsek egyre nvekv hasznlati rtk/r
viszonya forradalmastotta a mrnki tervezsi szemlletet. Egyre tbb
termket fejlesztettek a tradicionlis mrnki s termszettudomnyi ter-
letek hatrvonaln. Br vannak, akik tagadjk a mechatronika jszersgt,
mgis gy tnik, hogy az sszetett, tudomnygak hatrain tvel ismere-
teket tvz termkek tervezsnek ltezik egy sajtos, optimlis, magtl
rtetd mdszere: a mechatronika. A mechatronika a modern mrnki
tervezs fejldsi folyamatnak termszetes lpcsfoka, mely egysges
csomagba foglalja a termktervezs alapvet krdseit. A mechatronika
fontossgt vilgszerte felismertk: sok egyetemen knlnak mechatronikai
kurzusokat, referlt folyiratok s nagy rszvteli arny konferencik
fmjelzik az j szakg slyt.
1.1. Defincik
A mechatronika fogalmnak megfogalmazshoz idzznk nhny defin-
cit! Br mindegyikk megragad valamit a fogalom lnyegbl, azonban
egyikk sem kpes visszaadni a fogalom teljessgt.
A mechatronika els emltse a Yasakawa Electric Companytl szrma-
zik s a robottechnikval kapcsolatban merlt fel. A sz a mechanics (gp-
szet, mechanika) s az electronics (elektronika) kifejezsek sszevonsval
egyrszt azt jelzi, hogy a termkek s technolgik a mechanikus rszek
mellett egyre tbb elektronikt tartalmaznak. A szsszettel arra is utal,
nehz felismerni az egyik rszterlet vgt s a msik kezdett.
Taln a leggyakrabban idzett definci Harashima, Tomizuka s Fukadatl
szrmazik:
A mechatronika a gpszet szinergikus integrcija elektronikval s in-
telligens szmtgpes irnytssal, ipari termkek tervezse s gyrtsa
sorn.
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
rdemes felfigyelni a definciban szerepl szinergikus integrcira.
Eszerint a mechatronika sokkal tbb, mint a vzolt rsztudomnyok egy-
szer egyms mell helyezse. A hangsly a rszek klcsns egymsra
hatsn, a minsgileg j hatsok kialakulsn van. Nagyon hasonl meg-
fogalmazs olvashat Schweitzer mvben:
A mechatronika a mrnki tudomnyok interdiszciplinris terlete, mely
a gpszet, elektrotechnika s informatika klasszikus tudomnyterleteire
pl. Egy tipikus mechatronikai rendszer jeleket fogad, dolgoz fel, majd a
jeleket erkk s mozgsokk alaktva bocstja ki.
Az interdiszciplinris jelz alatt a jelenleg mg egymst ersen elklnl-
ve ltez tudomnygak mlyebb egyttmkdsnek szksgessge h-
zdik meg. A tudomnygak elklnltsgnek elssorban trtneti okai
vannak.
Auslander s Kempf defincija gy hangzik: A mechatronika komplex
dntshozatal, fizikai rendszerek mkdtetshez.
Tall Shetty s Kolk defincija is: A mechatronika elektromechanikus
termkek optomlis tervezshez alkalmazott mdszer.
Bolton szerint A mechatronika nem csak a villamos s mechanikus
rendszer hzassga. Sokkal tbb, mint csak egy szablyz rendszer. Az
elbbiek komplex integrcija.
Az eddigi trekvsek, melyek arra irnyultak, hogy egysgesen definil-
jk a mechatronika fogalmt, jellemezzk a mechatronikai termkek sajt-
sgait, vagy egysges mechatronikai tananyagot alaktsanak ki, nem vezet-
tek teljes eredmnyre. Az eltr megfogalmazsok azonban arra is utalnak,
hogy a mechatronika egy szertegaz, l, llandan vltoz j tudomny-
terlet. A defincik mind megegyeznek abban, hogy a mechatronika in-
terdiszciplinris terlet, melyben a kvetkez tudomnygak vannak jelen:
Gpszet (gpek, gpelemek, finommechanika)
Elektronika (mikroelektronika, teljestmnyelektronika, szenzor- s ak-
tutortechnika)
Informatika (rendszerelmlet, automatizls, programozs, mestersges
intelligencia)
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
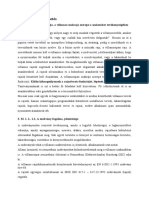
A legtbb szakirodalom a mechatronikt a felsorolt tudomnyterletek
kzs rszben helyezi el (1.1. bra). A gpszet s elektronika tfedse az
elektromechanika (elektromos mkdtets mechanikus szerkezetek). Az
elektromechanika s az informatika tfedse a mechatronika, mely intelli-
gens vezrls elektromechanikus berendezst jelent.
Gpszet Elektronika
Informatika
Mecha-
tronika
1.1. bra. A mechatronika tudomnyterletei
A tovbbiakban a mechatronika kifejezst az elzekben krlrt j
interdiszciplinris tudomnyg megnevezsre, valamint e tudomnyg
ismereteinek felhasznlsn alapul tervezsi eljrs elnevezsre egyarnt
hasznljuk.
1.2. A mechanikus rendszerek fejldsnek lpsei
A mechatronika lnyegnek jobb megismerse cljbl hasznos ttekinte-
nnk, hogy a gpek, berendezsek milyen fejldsi lpcskn keresztl
jutottak el mai fejlettsgk fokra. A felsorolsban nem megynk vissza
dmig s vig, a fejldst csupn a tisztn mechanikus szerkezetek
fejldstl kvetjk nyomon.
Jl szemllteti a tisztn mechanikus rendszerek fejldst s mecha-
tronikai rendszerekk trtn talakulst az 1.2. bra.
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
gzgp (1761)
belsgs motor (1880)
mechanikus rgp
Mechanikus rendszerek
-villamos hajtssal (1920)
-DC motor (1871)
-AC motor (1889)
-relk, tekercsek
-elektromos erst
-PI szablyz
szerszmgpek
szivattyk
elektromos rgp
Mechanikus rendszerek
-automatikus szablyzssal (1935)
gzturbina
replgp
-tranzisztor (1948)
-tirisztor (1955)
Mechanikus rendszerek
-analg szablyzssal
-szekvencilis vezrlssel (1955)
elektronikus lift
-digitlis szmtgp (1955)
-valsidej szoftver (1966)
-mikroszmtgp(1971)
Mechanikus rendszerek
-folytonos digitlis szablyzssal (1975)
ipari robotok
-mikrovezrl (1979)
-PC (1981)
-buszrendszerek
-elemek integrcija
Mechatronikai rendszerek
-mechanika s elektronika integrcija
-funkcikat a szoftver hatrozza meg
-szinergikus hatsok
mobil robot
CIM
mgnescsapgy
ABS, ESP,....
Tisztn mechanikus rendszerek
1.2. bra. A gpszet fejldse
Felmerl a krds, hogy a bemutatott talakulsi folyamat mely pontjtl
kezdve beszlhetnk mechatronikai elv berendezsrl? Termszetesen
nem attl fgg egy berendezs jsga, hogy azt minek nevezik, ezrt nem
rdemes komoly vitkba bocstkozni a krds eldntst illeten. Kln-
sen a villamos szablyzssal mkd berendezsek megtlsekor vannak
vlemnyklnbsgek a szakemberek kztt. Radsul a krds eldntse
az idk sorn is vltozott. Japnban pldul, amikor a mechatronika kife-
jezst szabadalmaztattk, az csupn egy mechanikus rendszert jelentett
elektronikus elemekkel, a szmtstechnika mg nem volt rsze a rend-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
10
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
10
szernek. A 70-es vek vgn a mechatronikai termkeket ngy csoportba
soroltk:
Tulajdonsg Pldk Alkalmazott eszkzk
mechanikus gyrtm-
nyok, melyek elektro-
nikval vannak elltva
a funkcionalits nve-
lse rdekben
NC gpek,
vltoz sebessg
hajtsok megmunkl
gpekben.
szervo technika,
szablyozstechnika,
teljestmny elektronika.
mechanikus berende-
zsek jelentsen mo-
dernizlt elektronikai
egysgekkel
modern varrgpek,
automata megmun-
kl kzpontok.
korai szmtstechnikai
eszkzk alkalmazsa
Eredeti mechanikus
rendszerek funkcii
elektronikval helyet-
testve
digitlis ra mikroprocesszor,
integrlt ramkrk
termkek, melyeket a
mechanikai s elektro-
nikai technolgik
szinergikus integrci-
jval terveztek
fnymsolk,
intelligens mosg-
pek
A tudomny s technika fejldsnek krlbell egy vszzadra volt szk-
sge ahhoz, hogy a tisztn mechanikus szerkezetek talakuljanak mecha-
tronikai szerkezetekk Mint az a tblzatbl is ltszik, a mechatronikai
berendezsek a hagyomnyos mechanikus berendezsekbl fokozatosan
fejldtek ki. Szmos klasszikus megolds mg most is felismerhet a mec-
hatronikai berendezsek konstrukcijban, hiszen azok alapveten me-
chanikai jellemzt: ert, elmozdulst hoznak ltre. A tisztn mechanikus
mkdsi elv berendezsek tkletestseknt elszr analg elektroni-
kus szablyzst alkalmaztak, melyet a villamos szenzorok s aktutorok
tettek lehetv. A rendszer mechanikus s villamos elemei mind trben,
mind a tervezs folyamatban mg elklnltek egymstl. A vitathatatlan
javuls ellenre a vltozsnak rnyoldalai is voltak, pldul a berendezsek
kis lettartama, nem megbzhat mkdse, krnyezeti zavarokra (vibr-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
11
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
11
ci, szennyezds, hmrskletvltozs) val rzkenysge, nagy hely s
vezetkigny, kis adatfeldolgozsi sebessge.
A konstrukci folytonos fejldsnek folyamatt nhny jl felismer-
het tendencia jellemezte: a miniatrizls, a zavar hatsokkal szembeni
nagyobb ellenll kpessg (robusztussg), az elektronikus komponensek
teljestmnynek nvekedse. Az emltett tendencik fknt a nagy integ-
rltsgi fok elektronikus rszek egyre nvekv rszarnybl addtak. A
konstrukcira jellemz lett, hogy azt kezdettl fogva mechanikus-elekt-
romos sszrendszernek tekintettk. A fejleszts clja a nagyobb auton-
mia (nll energiaellts, rintsmentes jeltvitel) lett. Fokozatosan k-
vetkezett be a funkcik megosztsa a mechanika s az elektronika kztt.
Mr a villamos erst s a villamos segdenergival mkd aktutorok
alkalmazsa is jelents egyszerstst okozott a konstrukci felptsben
(pl. villamos rgp, kamera). A berendezsek mechanikai felptse to-
vbb egyszersdtt a decentralizlt villamos hajtsokkal, melyet a mikro-
vezrlk alkalmazsa tett lehetv (varrgpek, tbb tengelyes megmun-
kl gpek, automatk). Az eredetileg mechanikusan megoldott funkcik
(feladatok) szma lecskkent, a funkcik egyszersdtek, a mretek csk-
kentek. A knny felpts kvetkeztben rugalmas, lengsekre hajlamos
szerkezetek jttek ltre. Megfelel szablyzssal (szenzorokkal, aktuto-
rokkal, elektronikval) azonban llthat nagysg elektronikus csillaptst
lehet ltrehozni, mellyel a szerkezet kros rezgsei cskkenthetk (elaszti-
kus robotok, elasztikus hajtslncok, darurendszerek, rllomsok).
A digitlis szablyzs beptsvel nem csak egy bizonyos fizikai meny-
nyisg tarthat elrt rtken, hanem egy eredetileg nemlineris tulajdonsg
rendszer egyszeren linearizlhat is. Mr nem kell a nem lineris rszeket (pl-
dul egy mgnesszelep nemlineris karakterisztikjt) kltsges eszkzk-
kel linearizlni, aminek kvetkeztben a konstrukcis s gyrtstechnol-
giai rfordts is kisebb lehet.
A szabadon programozhat alapjel-kpzvel a nemlineris mechanikus r-
szeket jl lehet illeszteni az ember ignyeihez (pldul elektronikus gzpedl, tv-
vezrls manipultorok).
A szablyzs tovbbi elnye, hogy a tnyleges s a megkvetelt rtk
lland sszehasonltsa rvn olyan nagy pontossg rhet el j hatsfokkal,
amit egy igen nagy pontossggal kivitelezett mechanikus elem vezrlsvel
egyltaln nem lehetne elrni. Ennek rendkvl nagy elnyei vannak, hi-
szen a megmunklsi pontossg cskkenthet s egyszerbb mechanikai
kialaktsok is elgsgesek. Egy igen szemlletes plda erre a CD-meghajt
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
12
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
12
fejpozicionl rendszere. Az olvasfejet mozgat mechanika motorbl,
tbbfokozat manyag frccsnttt, csapgyazs nlkli fogaskerk-
tttelbl, csavarorsbl, srld vezetkbl ll. A mechanika kotyog,
ltyg, akad, minsgileg alig klnbzik (ha nem rosszabb) az tvenes-
hatvanas vekben gyrtott lendkerekes kisautktl. Nem gondolnnk,
hogy ilyen ignytelen (de persze olcs!) mechanikval a mikromter trtr-
szt kitev pozcionlsi pontossg rhet el. A csodt a szablyzs s az
elektronika teszi most is. A mechanikra szerelt optikai fejet egy kis elekt-
romechanikus aktutor olyan pontossggal mozgatja, hogy az a mechani-
kus rendszer hibit kiegyenltse. A mechanikus rendszernek csupn annyi
a feladata, hogy durvn, nhny tized millimter pontossggal lljon r a
megkvnt pozcira. A villamos szablyzs a tbbit megoldja.
Az egyszerbb mechanikai felpts kvetkeztben fellp nagyobb s
vltoz rtk srlds a megvltozott viszonyokhoz automatikusan al-
kalmazkod adaptv szablyzssal kompenzlhat. Az adaptv szablyzs
teszi lehetv a berendezsek mkdst olyan munkapontokban is, ahol
egybknt a mkds instabil lenne. Ezltal a mkdsi tartomny kiter-
jeszthet.
Az elektronika rszarnynak nvekedse, a nvekv szm szenzor,
aktutor, kapcsol, szablyz s vezrl miatt a felhasznlt vezetkek
mennyisge is n, ami kltsg, sly, szksges trfogat nvekedst okoz.
Mindezek a problmk digitlis buszrendszer (CANBUS, PROFIBUS stb.)
alkalmazsval cskkenthetk. Leegyszerstve arrl van sz, hogy az sz-
szes emltett berendezs idosztssal egy szl vezetken kommunikl
egymssal s a kzponti szmtgppel, mikzben magt azonostja.
A mechatronikai szemlletmddal kialaktott berendezsek a hagyo-
mnyos funkcik egyszerstsn s megosztsn kvl olyan j funkcik
(feladatkrk, kpessgek) teljestst is lehetv teszik, melyek korbban
nem voltak megvalsthatk. Nhny mrhet mennyisgbl analitikus
sszefggsek felhasznlsval a digitlis szmtgp kpes nem mrhet
mennyisgeket is meghatrozni s a szablyzsban figyelembe venni. Pldul az
egymst kvet lengs-amplitdk mrsbl a csillapts meghatrozsa,
anyagban bred bels feszltsgek, srldsi tnyez meghatrozsa a
kszsi szgbl stb.
A berendezsek megbzhatsga irnti igny egyre fokozdik. Ennek
kielgtsben segt a jellemzk analitikus meghatrozsa, melynek a hibk
korai felismersben (diagnosztika), ellenintzkedsek meghozatalban
van szerepe (figyelmeztets, lellts, jra konfigurls).
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
13
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
13
A mechatronikai berendezsekben alkalmazott digitlis jelfeldolgozs alapvet
megklnbztet jellemzje e kszlkeknek, mely az j funkcik teljes-
tsn kvl lehetv teszi a vltoz feladatokhoz val rugalmas alkalmaz-
kodst.
A tervezs sorn szinte kivtel nlkl alkalmazzk a szimulci mdszert.
A szimulci feleslegess teszi a ksrletezst, meggyorstva ezzel a terve-
zs folyamatt. Ehhez elszr megalkotjk a rendszer matematikai modell-
jt (a viselkedst ler egyenletek rendszert), majd klnbz bemen
jelekre meghatrozzk a kimenjelet (kimenjeleket). Kzben a rendszer
szabadon vltoztathat paramtereit addig vltoztatjk, amg a kimenjel
valamilyen elre meghatrozott kritrium rendszer alapjn optimlis nem
lesz. A szimulci vgrehajtst fejlett programrendszerek (ADAMS,
MATLAB SIMULINK, VisSim) tmogatjk, de nem helyettestik az ala-
pos tudst. A szimulci csak a biztos ismeretekkel rendelkez mrnk
kezben hatkony eszkz, tuds hinyban nem tbb, mint sttben val
tapogatzs.
Szintn a termkek gyorsabb piacra kerlst segti, ha a berendezs
egyes rszeit prhuzamosan fejlesztik s a rszek integrlsa szoftverrel trt-
nik. Mind a vev, mind a gyrt szmra elnys, ha egy berendezs min-
den rsze ugyanattl a gyrttl szrmazik, mert ez a berendezs integr-
cis fokt nveli.
A mechatronikai elvek clszer alkalmazsra vlasszunk egy pldt a
szerszmgpek krbl. Az 1.3. brn fogaskerekek ellltsra szolgl
fogazgp kinematikai vzlata lthat. Az egyszersg kedvrt egyenes
fogazat fogaskerekek ksztsnek elvt mutatjuk be. A munkadarab
megmunklsra egy ahhoz hasonl, csak kemny anyagbl kszlt, meg-
felel forgcsol szgekkel elltott msik fogaskerk (szerszm) szolgl. A
szerszm egyrszt le-fel trtn oszcilll mozgssal mintegy vsi a fogr-
kot, kzben a kt kerk grdlkrei egymson lassan legrdlnek. gy
mire a munkadarab egyszer krbefordul, az sszes fogrok elkszl. A
legrdl mozgshoz a munkadarabot s a szerszmot sajt tengelyeik
krl klnbz fordulatszmokkal kell forgatni. A fordulatszmok ar-
nyt (az tttelt) a z
m
munkadarab s a z
sz
szerszm fogszm hatrozza
meg. Az tttelt a fogaz gphez mellkelt n. cserekerekek felszerelsvel
kell a gp kezeljnek ltrehozni. Hasonlan kell belltani a fogs mrt-
kt is, hogy egy-egy le-fel trtn vssi ciklus utn mekkora szggel for-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
14
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
14
duljon el a szerszm. A cserekerekes hajtmvek nagy helyet foglalnak el,
a kerekek fogszmnak kiszmtsa, a kerekek felszerelse idignyes, a
sok mechanikus tttel a gp ered pontossgt nagymrtkben lerontja.
Megmunkland
fogaskerk
Szerszm
Fhajts
Fmotor
Fogs mellkhajts
Asztal
mellkhajts
1.3. bra. Hagyomnyos fogazgp
A mechatronikai szemlletmd lnyegesen cskkenti a fogazgp bonyo-
lultsgt (1.4. bra). A cserekerekes hajtmvek helyett kln villamos
hajtsokat alkalmazunk. A munkadarab s a szerszm most mr nem me-
chanikus ton, hanem villamosan van egymshoz szinkronizlva. A szink-
ronizls villamos szablyzkrrel trtnik, melynek alapjelt (jelen eset-
ben az elrt szgelfordulst) egy vezrlberendezs lltja el. Mind a
szerszm, mind a munkadarab szghelyzett nagyon pontos szenzorok
mrik. Az elrt s a tnyleges szgpozci eltrsnek mrtktl fggen
a szablyz utastst ad a tengelyeket kzvetlenl forgat motoroknak. A
vezrls tetszleges programozhatsga most mr nem csak a rendelke-
zsre ll cserekerekek ltal megvalsthat, hanem tetszleges fogszm
fogaskerekek gyrtst is lehetv teszi. Az elektronika alkalmazsa teht
nem csak egyszerbb s gyorsabb tette a gp kezelst, hanem j, eddig
meg nem lv kpessgeket (funkcikat) is ltrehozott.
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
15
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
15
Vezrls
Szablyz
Szerszmforgats
szablyzkre
alapjel
Fmotorhajts
szablyzkre
Munkadarab forgats
szablyzkre
Motor
Szenzor
1.4. bra
A bemutatott pldn az egyszerbb mechanikai felpts, a decentralizlt
rszek, a digitlis vezrls, a nagyobb pontossg elrse vezrlssel, vala-
mint j funkci teljestse ismerhet fel.
1.3. A mechatronikai berendezsek tulajdonsgai
A hagyomnyos, tisztn mechanikus felpts berendezsek fokozatos
talakulsa sorn ltrejtt mechatronikai berendezsek legfontosabb tulaj-
donsgait az albbi tblzatban sszefoglalva lthatjuk. A fontossgi sor-
rend tekintetben szeretnnk hangslyozni a digitlis szablyzs alapvet
fontossgt.
Hagyomnyos megolds
Jellemzk s pldk
Mechatronikai elv megolds
Jellemzk s pldk
Terjedelmes mret (elektrome-
chanikus rgp)
Tmr kialakts (elektronikus
rgp/nyomtat)
Komplex mechanika (befecsken-
dez szivatty forg dugattyval)
Egyszer mechanika (befecsken-
dez szivatty mgneses szeleppel)
sszekapcsolt rszek (szjhajts
aggregt)
Autonm rszek (decentralizltan
hajtott aggregt)
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
16
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
16
Hagyomnyos megolds
Jellemzk s pldk
Mechatronikai elv megolds
Jellemzk s pldk
Merev felpts (merev hajtslnc
jrmveknl)
Rugalmas felpts (rugalmas
hajtslnc elektronikus csillaptssal)
Mozgs vezrlssel vagy analg
szablyzssal (robot megfog)
Mozgs digitlis szablyozssal
(errzkeny robot megfog)
Pontos trsezs (vezrelt
aktutorok, pl. lptetmotorral ve-
zrelt olvasfej)
Pontossg elrse szablyzssal
(szablyozott aktutorok, srlds,
kops kompenzci)
Nem mrhet mennyisgek el-
hanyagolsa (jrm lland csilla-
ptssal)
Nem mrhet mennyisgek
meghatrozsa szmtssal (jr-
m vltoz csillaptssal,
linearizls)
Egyszer felgyelet (ramfelgye-
let motorban)
Felgyelet hibadiagnosztikval
(aut)
Huzalozsi problma (kbelkor-
bcs jrmben)
Buszrendszer vagy huzalmen-
tes kommunikci
Tulajdonsgok llandk (kttt-
plys szllteszkzk)
Adaptv, tanul s vltoztathat
tulajdonsgok (mobil szlltesz-
kz automatikus navigcival)
1.4. A mechatronikai rendszer felptse
A manapsg mechatronikai jelzvel illetett berendezsek ltalnos fel-
ptse az 1.5. brn lthat. A berendezs agya egy digitlis elven m-
kd, bonyolult szmtsok elvgzsre is kpes mikroszmtgp. A
szenzorok ltal mrt fizikai mennyisgekkel arnyos jelek elfeldolgo-
zs utn a szmtgpbe kerlnek. A szmtgp eltrolt stratgik szerint
jeleket generl az aktutorok mkdtetshez. A jeleket teljestmnyers-
t hozza olyan teljestmnyszintre, mely az aktutorok meghajtshoz
szksges. Az aktutorok erket s/vagy mozgsokat hoznak ltre, melye-
ket megfelel hajtsok alaktanak t a clnak megfelelen s adnak t a
krnyezetnek. A feladat vgrehajtsnak eredmnyrl visszacsatols ad
informcit a szmtgpnek a tovbbi dntsek meghozatalhoz. rde-
mes megfigyelni, hogy egy mechatronikai berendezs felptse mennyire
hasonlt egy szablyzs blokkdiagramjhoz.
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
17
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
17
Aktutorok
Teljestmny ersts
Energia talakts
Szenzorok
Energia talakts
Jelfeldolgozs
Fizikai folyamat
mechanikus, villamos, fluid,
kmiai, termikus elemek
keverke
Informcifeldolgozs
Elektronika, szoftver
Kommunikci Kezeli interfsz
Nagy teljestmny
Kis teljestmny
tttelek,
vezetkek
1.5. bra
1.5. A mechatronika rszterletei
A mechatronika bevonult az let szinte minden terletre. A teljesg ig-
nye nlkl nhny mindenki ltal ismert terlet mechatronikai termkeit
tekintjk t a kvetkezkben.
A szemlyi szmtgpek perifrii (nyomtat, lemezmeghajt) olyan
elektromechanikus berendezsek, melyek mkdst magas fok, digitlis
elven mkd szmtgpes rendszer irnytja. A szrakoztat elektronika
tern a CD s DVD, valamint a videokamerk megjelense az optikt is
bevonta az integrland tudomnyterletek sorba. gy a mechatronika j
ga jelent meg: az optomechatronika. Csak nhny pldt emltve a digitlis
fnykpezgpek, a 2D s 3D-s scannerek, projektorok, vonalkd olva-
sk, lzeres szintezk is ehhez a csoporthoz tartoznak. A fejlds jellem-
zsre rdemes megjegyezni, hogy egy videokamerban az elemek integr-
cijnak olyan foka valsul meg, hogy a mretek tovbbi cskkentsnek
mr a kezelgombok szksges tvolsga szab hatrt.
A mechatronika betrt az orvostudomnyok terletre is. Ltezik mr
olyan robot, mellyel az USA-bl tvirnytssal vgeztek mttet Eurp-
ban. Itt nem elssorban a tvolsg lekzdse a f eredmny, hanem a ma-
nipultor-karoknak az embernl sokkal finomabb mozgatsa, valamint a
sebsz szmra nyjtott nagy felbonts hrom dimenzis lts. A roboti-
ka terletrl szrmaz eredmnyeket hasznostja a biomechatronika, mely
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
18
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
18
tbbek kztt intelligens, bioramokkal mkdtetett vgtagok kifejleszt-
svel foglalkozik. Az emberbart gpek terletn ttrs vrhat a bel-
tethet szenzoroktl, melyek pldul a vakok rszleges ltst adhatjk
vissza.
A robotika az emberisg rgi lmt valstja meg, levve a nehz, mo-
noton munkt az ember vllrl. A korai, csak egy feladatra szolgl ma-
nipultorok helyt fokozatosan tvettk a klnbz feladatokra progra-
mozhat robotok. Manapsg ponthegeszt, fest, rakod robotok vgzik
a termels rutinfeladatait. A gyrakban robotokbl, CNC gpekbl, meg-
munkl kzpontokbl ll rugalmas gyrtcellkban trtnik a kis s
kzpsorozat gyrts. A lt, kpfeldolgoz s helymeghatroz rend-
szerrel rendelkez mobil robotokat az zemen belli szlltson kvl az
rkutatsban, valamint a katasztrfk s terrorcselekmnyek elhrtsban
is alkalmazzk.
Vgezetl, de nem utols sorban szlnunk kell az aut talakulsrl
is, hiszen a mechatronika kzlekedsben betlttt szerepe jl kvethet egy
aut pldjn. Az aut mindenki ltal ismert fogyasztsi cikk. Azrt is j
plda, mivel egy egsz orszg iparnak fejlettsge mrhet le rajta. A 60-as
vekig csak a rdi volt az egyetlen elektronika az autban. A tbbi funk-
ci tisztn mechanikus vagy elektromos volt. Az egsz rendszert a vezet
irnytotta. Az gsi folyamat alaposabb vizsglatbl kiderlt, hogy ltezik
egy optimlis idpont a tzelanyag meggyjtsra. Az elektronikus gyj-
tsi rendszer volt az els mechatronikai rendszer az autban a 70-es vek
vgn, mely a ftengely s a vezrmtengely pozcijnak rzkeljbl,
lgrammrbl, a gzpedl pozcijnak s vltozsi sebessgnek rz-
keljbl s mikrokontrollerbl llt. A blokkolsgtl (ABS, Antilock
Brake System) szintn a 70-es vek vgn jelent meg. A rendszer brme-
lyik kerk blokkolst rzkeli s addig vltoztatja a fkhenger olajnyom-
st, amg a kerk blokkolsa megsznik, miltal a kocsi irnythatsga
fennmarad s a fkt lecskken. A 90-es vek kzeptl bevezetett von-
er szablyz rendszer (kiprgsgtl, TCS, Traction Control System) a
gyorsts sorn rzkeli a csszst s a kiprg kerk nyomatkt vltoz-
tatja. Ez a folyamat lehetv teszi, hogy az aut az adott tviszonyok k-
ztt maximlis gyorsulst rjen el. A jrmdinamika szablyz (VDC,
Vehicle Dinamic Control) a 90-es vek vgtl nyert alkalmazst. A rend-
szer a kormnykerk llsbl hatrozza meg a vezet szndkt s ssze-
hasonltja a kocsi tnyleges mozgsval. Az eltrs hatsra gy szablyoz-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
19
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
19
za az egyes kerekek nyomatkt s szgsebessgt, hogy minimalizlja az
eltrst.
Ma egy autban 30100 mikrovezrl tallhat, melyek a motor irny-
tst, tttel szablyozst, lgzsk mkdtetst, ls s tkr lltst,
ablakemel vezrlst stb. vgzik. Mg rgebben a minsg s megbzha-
tsg voltak a megklnbztets szempontjai aut vsrlsa esetn, ma-
napsg egyre inkbb a mechatronikai jellemzk kerlnek eltrbe. Az aut
mechatronizlsa a kvetkez terleteken vrhat: adaptv szablyozsi
technolgik alkalmazsa, valsidej programozsi mdszerek a szably-
zsok tkletestsre, MEMS-ek (Micro Electro Mechanical Systems)
alkalmazsa elssorban szenzorokban, elektromos fk (brake-by-wire) a
hidraulika kikszblsre, aktv felfggeszts a komfort nvelsre,
hangfelismers, navigci a vezets megknnytsre.
1.6. Mikor clszer a mechatronika alkalmazsa?
Az interdiszciplinris mechatronikai ismeretekkel rendelkez mrnk k-
pes a konvencionlis gpszerkesztsi elveken tllp, a gpszeti s elekt-
ronikai megoldsokat kombinl egyszerbb s olcsbb megoldsokat
ltrehozni, st sokszor rgebben megoldhatatlannak tn feladatokat is
megoldani.
A mechatronika minden ron val alkalmazsnak azonban vannak
rnyoldalai is. Az gyval lni verbre nha valban kros, mint azt a
kvetkez pldnk is mutatja Roddeck: Einfhrung in die Mechatronik c.
knyve alapjn.
rug
k
io
ld
csappanty
v
a
s
1.6. bra. Hagyomnyos egrfog
A feladat egy egrfog tervezse. Mr nagyon rgta hasznljk a tisztn
mechanikus elven mkd egrfogt (1.6. bra). A szerkezet tulajdonkp-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
20
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
20
pen tartalmazza mindazokat az elemeket, melyek egy mechatronikai szer-
kezetben is megtallhatk. A csappanty, melyre valamilyen csaltket he-
lyeznek, szenzorknt viselkedik. Amint az egr rlp a csappantyra, az
lehajlik, ettl a kiold drt elre hzdik s kioldja a rugban, mint ener-
giatrolban trolt energit. A rug drtjbl kialaktott tvas aktutor-
knt mkdve tbillen a msik oldalra s agyonti az egeret.
Felmerl a lehetsg, hogy a feladatot elegnsabban is meg lehetne
oldani. Nhny rszfeladatot (rszfunkcit) mechatronikai ptelemekkel
is helyettesthetnk (1.7. bra). Szenzorknt alkalmazhatunk fnysorompt
(transzmisszis optokaput), melyben a lthatatlan infravrs tartomny
fnysugr tjt a csaltket eszeget egr megszaktja. Msik lehetsgknt
egy mikrokapcsol is szmtsba jhet, mely az egr slynak hatsra
zrdik. Ez utbbi megolds annyiban elnysebb, hogy az egrfog k-
szenlti (stand-by) zemmdban nem fogyaszt ramot s a vezrls is egy-
szerbb. A kioldt is lehet helyettesteni egy elektromgnessel, melyet a
vezrlegysg mkdtet. Felteheten ez az egrfog is kifogstalanul m-
kdne, azonban a meghibsodsi eslye, s nem utols sorban kltsge
sokszorosa lenne a hagyomnyos egrfognak. Tanulsgos a plda any-
nyiban, hogy nem mindenron kell megvltoztatni a mr jl bevlt szerkezeteket!
optokapu
vezrls
kioldmgnes
vezrls
mikrokapcsol
1.7. bra. Mechatronikai sajtsgokat is mutat egrfog
Ms a helyzet, ha olyan egrfogt kell tervezni, mely tbb egr befogsra
is alkalmas az egerek srlse nlkl. Ilyen igny pldul orvosi vagy koz-
metikai kutatsoknl alkalmazott fehregerek befogsakor merlhet fel.
Ezt a feladatot tisztn mechanikus szerkezettel nem tudnnk megoldani,
teht sszernek tnik egy mechatronikai elv egrfog megalkotsa (1.8.
bra). Az egrfog kt trbl ll. Az els trbe bejut egeret az 1. opto-
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
21
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
21
kapu rzkeli s a vezrls parancsot ad a bejrati ajt bezrsra. (Ez egy-
szer feladatnak tnik, mgis tbb rszfeladatbl ll: a motort addig kell
mkdtetni, amg annak bezrdst egy vglls kapcsol nem rzkeli).
Amint a bejrati ajt teljesen becsukdott, a vezrlegysg kinyitja a gyj-
ttr ajtajt, ahol mr esetleg tbb befogott egr is tartzkodik. Hogy az
egerek kiszaladst az els trbe megakadlyozzuk, valamint az j egeret a
gyjttrbe kergessk, egy szirna lp mkdsbe. Amint az egr bejutott
a gyjttrbe, a 2. optokapu fnysugara megszakad s a vezrls zrja a
gyjttr ajtajt, majd utna kinyitja a bejrati ajtt. A berendezs ksz
jabb egr befogsra. Valsznleg a mechatronikai elvek szerint megter-
vezett egrfog tbb-kevsb megoldan a kitztt feladatot, s ezzel
megszolgln a nagyobb kltsget, br nem lehet kizrni, hogy a gyjt-
trbl nem futnnak ki az egerek a szirna hangja ellenre. Tanulsgos
megfigyelni s sszehasonltani a most ismertetett s az elbbi berendezs
vezrlsi elvt. Az elz egrfognl a vezrls csak addig ad jelet a
kioldmgnes mkdtetsre, amg megszakad a fnysugr tja. A vezr-
ljel itt csak a logikai vltoz (optokapu llapotnak) pillanatnyi rtktl
fgg (kombincis vezrls).
vezrls
optokapu 1
optokapu 2
hajts 1
hajts 2
?
gyjttr
bejrati ajt
gyjttrajt
terelhang
1.8. bra
A mechatronika alapjai Mi a mechatronika?
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
22
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
22
A mechatronikai elv egrfog vezrlse azonban teljesen ms rendszer.
A gyjttr ajtaja nem csak addig kap vezrljelet a zrsra, amg a 2.
optokapu jele megszakad (az egr ppen thalad a gyjttr ajtajn), mert
ilyen rvid id nem elegend az ajt zrshoz. Az ajtt mkdtet motor
vezrl jelnek egszen az ajt bezrdsig kell tartani. A gyjttr ajtajt
mozgat motor a kvetkez felttelek mellet kap a zrsra utastst: a be-
jrati ajt zrva van, a 2. optokapu fnysugara (akr csak egy pillanatra is)
megszakadt, a troltr ajtaja mg nem zrdott be (vgllskapcsol nyi-
tott). Az optokapu fnysugarnak pillanatnyi megszakadst teht idben
mintegy meg kell hosszabbtani, vagyis olyan emlkez tulajdonsgot kell biz-
tostani a rendszernek, ami megjegyzi a fnysugr rvid megszakadst.
Ennl a vezrlsfajtnl bizonyos logikai vltozk (bejrati kapu llapota,
vgllskapcsol llapota) pillanatnyi rtkn kvl ms logikai vltoznak
(2. optokapu) a mltban bekvetkezett llapottl is fgg a vezrljel rt-
ke (szekvencilis vezrls).
Egy msik ismert plda a porszv esete. Szinte csak fokozatmentesen
vltoztathat szverej porszvkat kapni az zletekben. A fejlettebb
tpusok a szvert automatikusan vltoztatjk a porzsk teltettsgnek
fggvnyben. Ugyanakkor ltalnos tapasztalat, hogy szinte mindenki a
maximlis szverre lltva hasznlja a porszvjt. A porszv funkcii-
nak egy rsze gy felesleges, kihasznlatlan.
Ugyanez mondhat el egy vide-kamerrl is. Annyi kezelgombot s
olyan kzel helyeznek el rajta, hogy egyszerre egy gomb megnyomsa mg
a legvkonyabb ujj embernek is nehzsget okoz. gy kell kzben tartani
a kamert, mint egy hmes tojst, nehogy valamelyik gombhoz vletlenl
hozzrjen a keznk. Az tlag felhasznl itt is csak a lehetsges funkcik
tredkt hasznlja.
Hogy mgis mirt teszik alkalmass a berendezseket felesleges funk-
cik elltsra is? Felteheten a fogyasztk meggyzsre. A felesleges
funkcik zmt a berendezsbe amgy is beptett mikrovezrl program-
jnak nhny soros bvtse gyakorlatilag pluszkltsg nlkl teszi lehet-
v. Az amerikai vevk mr megszoktk az elad vlaszt arra a krdsre,
hogy Mire j ez?. A vlasz: Nice to have. (J, ha van)
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
23
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
23
2. Jelek s feldolgozsuk
2.1. Jelek felosztsa
A mechatronikai berendezsek egyes rszei kztt az energia s az infor-
mci ramlsa teremt szoros kapcsolatot. Energia tvitel csupn a telje-
stmnyerst s az aktutor kztt br jelentsggel, mg a berendezs
tbbi rsze kztt az informciramls a meghatroz.
Informci alatt valamely kzls szmszeren kifejezhet ismerettartalmt
rtjk.
Az informci hordozja a jel, mely a konkrt fizikai folyamattl elvonat-
koztatott, absztrakt fogalom.
Jel alatt valamely fizikai mennyisg olyan rtkt, vagy rtkvltozst rt-
jk, mely informci szerzsre, tovbbtsra, vagy trolsra alkalmas.
A jel megadhat egy x=x(t) idfggvnnyel, melynek t
0
tt
1
rtelmezsi
tartomnya lehet vges vagy vgtelen. A jeleket tbb szempont szerint
lehet csoportostani (2.1. bra).
rtkkszlet szerint:
Folytonos. Brmely rtket felvehet pl. 010V kztt.
Szakaszos (amplitd-lptkezett). Csak bizonyos meghatro-
zott rtkeket vehet fel (pldul az rtkkszlet n-ed rsznek
tbbszrseit). Tulajdonkppen a digitalizlst takarja.
Idbeli lefolys szerint:
Folyamatos. Brmely idpontban vltozhat az rtke.
Szaggatott (idben lptkezett). Csak meghatrozott idpillana-
tokban (pldul mintavtelezs idpontjban) vltoztathatja rtkt.
Informci megjelents formja szerint:
Analg. Az informcit a jelhordoz rtke kzvetlenl kpviseli
(pldul a sebessgmr szenzor feszltsgjele).
Digitlis. Az informci diszkrt rtkekben, szmokk kdoltan
ll rendelkezsre.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
24
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
24
rtk meghatrozottsga:
Determinisztikus. rtke meghatrozott idfggvnnyel adhat
meg. Lehet a ciklikus folyamatokra jellemz periodikus s az tme-
neti folyamatokra jellemz tranziens lefolys.
Sztochasztikus. Szablytalan lefolys, rtke idfggvnnyel
nem, csak statisztikai mdszerekkel adhat meg. A jel statisztikai
jellemzitl fggen lehet stacionrius vagy instacionrius. A szto-
chasztikus jelek lehetnek tovbb ergodikusak s nem ergodikusak.
t t
it
jx
it
x
x
x
folytonos (an)
folyamatos
folytonos(an)
szaggatott
szakaszos (dig)
folyamatos t
x
t
szakaszos (dig)
szaggatott
2.1. bra. Nhny tipikus jel
2.2. A jelek fontosabb jellemzi
Az albbiakban kiszmtjuk az
T
, t sin A ) t ( x
2
= = fggvnnyel
megadhat jel nhny fontosabb jellemzjt.
Cscsrtk: ) x max( x =
A x =
Szmtani kzp:
=
T
dt ) t ( x
T
x
0
1
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
25
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
25
[ 0
1 1
0 0
=
= =
T
T
t cos
T
A
dt ) t sin(
T
A x
Ngyzetes kzp
2
1
0
2
1
=
T
dt ) t ( x
T
x
~
(Effektv rtk,
RootMeanSquare)
2
2
2 1 1 1
0 0
2
A
dt
t cos
T
A tdt sin
T
A x
~
T T
=
= =
Szrs:
2
1
0
2
1
=
T
x
dt ) x ) t ( x (
T
2
0
1
0
2
A
dt ) t sin A (
T
T
x
= =
Az imnt kiszmtott jellemzket szinuszos jelre a 2.2. brn brzoltuk.
x
t
x
x
~
x
O
2.2. bra
2.3. Jelformls
A jelek kzvetlenl ritkn rtkelhetk, mert vagy a szintjk nem megfele-
l, s/vagy zavarkomponenseket is tartalmaznak. Ms esetekben a jelek
kdolva vannak, ami kirtkelsket nehezti. A jeleket ezrt cljainknak
megfelelen formlni kell, hogy vgs felhasznlsra alkalmasak legyenek.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
26
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
26
Az albbiakban a jelek elzetes feldolgozsnak nhny egyszer mdsze-
rt ismertetjk a teljessg ignye nlkl.
2.3.1. Ersts
Az x(t) jel amplitdjt A-szorosra nveljk. Az erstst tbbnyire m-
veleti erstvel valstjuk meg. Meg kell jegyeznnk, hogy a kimen jel
amplitdja a jel frekvencijtl is fgghet. Az erst svszlessge azt a
frekvenciasvot jelenti, melyen bell a kimen jel Ax(t) s 2 / ) t ( Ax
kztt van (3 dB), azonos amplitdj x(t) bemenjelet felttelezve.
x(t)
Ax(t)
t
x
x
ki
) t ( Ax
2 ) t ( Ax
f
svszlessg
2.3. bra. Ersts fogalma s erst svszlessge
2.3.2. Invertls (fzisfordts)
A jelet a vzszintes tengelyre tkrzzk, ms szval A=-1-szeres erstst
vgznk.
x(t)
-x(t)
t
x
2.4. bra. Invertls
2.3.3. Egyenirnyts
A pozitv s negatv rtkeket tartalmaz jelbl csak pozitv rtkeket tar-
talmaz jelet lltunk el tbbnyire didt tartalmaz ramkrkkel. A 2.5.
brn n. ktutas egyenirnyts eredmnyt ltjuk.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
27
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
27
x(t)
x(t)
t
x
2.5. bra. Egyenirnyts
2.3.4. Szinteltols
Bizonyos esetekben egy ramkr kimenjele s az azt kvet egysg meg-
engedett bemeneti jelszintje kztt szintklnbsg van, amit a jel eltols-
val szntethetnk meg. Ilyen esettel tallkozunk akkor is, amikor egy jel
egyenram sszetevjt kell levlasztanunk kondenztor alkalmazsval.
x(t)
t
x
2.6. bra. Szinteltols
2.3.5. Szrs
A hasznos jelre sok esetben nagyfrekvencis zavarjelek szuperponldnak
a krnyezeti zavarokbl. Ms esetben a hasznos jel kis frekvencis jelen
(pl. a hlzati 50Hz-es szinuszos zavarjelen) l rajta. Amennyiben a hasz-
nos s a zavarjel frekvencija jl elklnl, lehetsg van a zavarjel kisz-
rsre. Els esetben (2.7. bra) alultereszt szrt alkalmazunk, mely a
hasznos alacsonyfrekvencis jelet tengedi, a nagyfrekvencis zavarjelet
kiszri. Msodik esetben a kisfrekvencis jelkomponenst szrjk ki a jel-
bl.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
28
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
28
t
x x x
t
t
Alultereszt szr
kimen jele
Felltereszt szr
kimen jele
2.7. bra. A zavarkomponens kiszrse
Amennyiben a zavarjelek a frekvenciaspektrum nagy rszt lefedik, sv-
szr alkalmazsval egy szk frekvenciatartomnyba es (hasznos) jelek
megtarthatk, a svon kvl es frekvenciakomponensek kiszrhetk.
Korrelciszmtssal periodikus jelsszetevt tudunk kimutatni igen
zajos jelbl, ha a zajjel sztochasztikus.
2.3.6. Komparls
Jelszintek sszehasonltsra szolgl eljrs. Egy analg jelrl kell eldn-
teni, hogy rtke egy megadott szintnl kisebb, vagy nagyobb. A kompar-
tor tbillen, amint a vizsglt jel az adott x
ref
szintet tlpi (2.8. bra). Pld-
ul egy szinuszos jel peridusainak megszmllshoz a jelet elszr ngy-
szgesteni kell, mieltt az egy digitlis szmllba kerl.
t
x
xref
2.8. bra. Kompartor jelalakja
A komparls csak sima jelen vgezhet el eredmnyesen. Ha a jel zajos,
akkor a kompartor a zaj hatsra tbbszr is tbillenhet, ami sok esetben
kerlend. A problma egy holt svval rendelkez kompartorral, az n.
Schmitt-triggerrel kszblhet ki (2.9. bra). A Schmitt-trigger akkor
billen pozitv irnyba, mikor a jel az x
r,f
fels referenciaszint fl kerl.
Visszabillens csak akkor kvetkezik be, mikor a jel az x
r,a
als referencia-
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
29
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
29
szint al kerl. Amennyiben a zajjel amplitdja kisebb a holtsvnl, a
nemkvnatos tbillensek elkerlhetk.
t
x
xref
x
xr,f
xr,a
Kompartor Schmitt-trigger
2.9. bra. Kompartor s Schmitt-trigger kimen jele
2.3.7. Modulci, demodulci
Egy lland frekvencij szinuszos jel, az n. x
v
vivjel amplitdjt a
hasznos x(t) jel temben vltoztatva jutunk az amplitd modullt jelhez.
Az amplitdmodulci (AM) a tvkzlsben, rditechnikban mr rg-
ta ismert. Hasonl jelensggel tallkozunk a kapacitv, vagy induktv
szenzoroknl is. Pldul az indukivits vltozsa az krfrekvencij
szinuszos feszltsggel tpllt tekercs X
L
=L impedancia vltozst
okozza, ami a tekercsen tfoly ram amplitdjt vltoztatja.
xv
t
t
x
xm
t
2.10. bra. Amplitdmodulci
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
30
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
30
Az induktv szenzor amplitd modullt jelbl a hasznos informci
kinyerse az ellenttes eljrssal, a demodulcival trtnik.
Az amplitdmodulcin kvl gyakran alkalmaznak a tvkzlsben
frekvenciamodulcit (FM) a sokkal jobb hangminsg miatt, valamint
impulzus szlessg modulcit (Pulse With Modulation, PWM) tbbek
kztt motorok tpfeszltsgnek vltoztatsra. Ezeknl a mdszereknl
a jel amplitdja lland, s vagy a vivjel frekvencija, vagy a ngyszgje-
lek szlessge (kitltsi tnyezje) vltozik.
xv
t
t
x
xm
t
t
t
t
x
xm
xv
FM PWM
2.11. bra. Frekvencia s impulzusszlessg modulci
2.3.8. Digitalizls
A jelek elsdlegesen analg termszetek, mivel a termszeti jelensgek-
ben folytonos vltozsok mennek vgbe. A mechatronikai berendezsek
irnytsa azonban szinte kizrlagosan digitlis elven mkd mikrosz-
mtgpekkel trtnik, ezrt az analg jeleket digitlis alakra kell hozni. A
digitalizlt jel egysge a bit, mely kt rtket, 0-t s 1-et vehet fel. (Szoks
L=low s H=high logikai szinteknek is nevezni.)
A digitlis jel (szm) kettes alap szmrendszerben a kvetkez alak:
0
0
1
1
2
2
1
1
2 2 2 2 2 a a a ... a a
n
n
n
n
+ + + + +
,
ahol az a
i
egytthatk lehetsges rtke 0 vagy 1.
Pldul
0 1 2 3 4
2 1 2 1 2 0 2 0 2 1 19 + + + + = , vagyis 19
10
=10011
2
.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
31
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
31
A gyakorlatban az A/D konverzi sorn a jel rtkkszlett N=2
n
egyenl
rszre osztjk. A feloszts finomtsval s a mintavtel idejnek csk-
kentsvel a digitlis jel egyre jobban kveti az analg jelet. A felosztst
azonban rtelmetlen a jel zajsszetevjnl finomabbra vlasztani, hiszen
ekkor mr a hasznos jelrl nem kapunk tbb informcit, csak a zajt digi-
talizljuk. Az N rtke clszersgi okokbl 2 egsz szm hatvnya. Az n
hatvnykitev jelenti, hogy hny bites az talakt. A 2.12. brn 8=2
3
,
teht az talakt 3 bites.
A digitalizls sorn a digitalizland jelbl bizonyos T idnknt min-
tt vesznek egy n. nulladrand mintavev-tart (Zero Order Sample&Hold)
egysggel (karikval jellve a mintavtelezett rtkeket), majd a mintavett
rtket a hozz legkzelebb ll diszkrt rtkre kerektik (kvantljk). Az
gy elllt digitlis jellel aztn tetszs szerinti numerikus s logikai mvele-
tek vgezhetk.
x
2
4
5
6
t
kT
2.12. bra. Analg jel digitalizlsa
Az A/D talaktk sok fajtja kzl a leggyorsabb n. flash-tpus talak-
t elvi mkdst mutatjuk be. A mrend jelet a kvantlsi szintekkel
kln-kln, de egy idben hasonltjuk ssze. A kvantlsi szinteket fe-
szltsgosztval lltjuk el. A dekder ramkr az egyes kompartorok
kimeneteinek logikai feldolgozsval lltja el a digitlis kimenjelet.
A mechatronika alapjai Jelek s feldolgozsuk
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
32
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
32
+ + + + -
- - -
U
x
U
ref
DEKDER
R R R 1,5R 0,5R
U
r3
U
r1
U
r2
U
r4
Digitlis kimenet
2
0
2
1
mrend j el
2.13. bra. A/D talakt
Az A/D konverzi ellentettje a D/A konverzi, mikor a szmtgp ltal
feldolgozott digitlis jelet pldul a motorok szmra vissza kell alaktani
analg jell. A 2.14. brn mveleti erst sszegz kapcsolsval megva-
lstott D/A talaktt lthatunk. Az egyes bitek slyozst R, R/2, R/4,
R/8 stb. ellenlls-hlzat valstja meg.
2
0
2
1
2
2
R
R/2
R/4
-
+
R
U
t
U
ki
4i
0
2i
0
i
0
analg kimenet
digitlis bemenet
2.14. bra. D/A talakt
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
33
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
33
3. Mechatronikai berendezsek
irnytsi rendszere
A korszer berendezsek nmkd mkdsrl az irnytsi rendszer
gondoskodik. Az irnytsi rendszer tbb skon (szinten) valsul meg (3.1.
bra).
3.1. Az irnytsi rendszer szintjei
Az irnytsi rendszer als szintjei gyorsan reaglnak a bemenetekre s
helyileg hatnak. A gyakran ismtld rutinfeladatokat ltjk el. Az emberi
szervezetben pldul a test hmrskletnek lland rtken tartsa, vagy
a lgzst fenntart vegetatv idegrendszer jtszik hasonl szerepet.
A magasabb szintek lassabban reaglnak a bemenetekre, de globlisan,
az egsz rendszerre kiterjeden hatnak. A gondolkodst ignyl folyama-
tokhoz hasonlthat a szerepk.
Menedzsment
Felgyelet
Szablyozs
Folyamat
Vezrls
1
2
3
xa
ya
I
r
n
y
s
s
k
j
a
i
3.1. bra. Az irnytsi rendszer szintjei
Az egyes skok feladatai a kvetkezk:
1. sk: Vezrls, szablyozs, visszacsatols a stabilitsi, vagy csillaptsi
tulajdonsgok javtsa rdekben.
2. sk: Felgyelet vszjelzs adssal, felgyelet automatikus vdelemmel,
felgyelet hibadiagnosztikval, felgyelet redundns (tartalk) rend-
szerre val tkapcsolssal.
3. sk: Alrendszerek sszehangolsa, optimalizls (hatsfok, kops, zaj,
emisszi), ltalnos menedzsment feladatok (krnyezethez val al-
kalmazkods, tervezs)
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
34
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
34
A kvetkez rszben csupn a legals, hagyomnyosan alkalmazott 1.
irnytsi szinttel foglalkozunk rszletesebben.
3.2. A vezrlsi/szablyozsi szint
A vezrlsi / szablyozsi szint, mint neve is mutatja, a vezrlst s a sza-
blyozst foglalja magban. Bonyolultabb berendezsekben egyidejleg
mindkt irnytsi fajta megtallhat. Egyszerbb esetekben vagy csak
vezrls, vagy csak irnyts fordul el.
3.2.1. Vezrls
Vezrlsrl beszlnk, ha a folyamatrl szerzett informci alapjn be-
avatkozunk a folyamatba, de az irnytott jellemz alakulsa nem hat visz-
sza a vezrl berendezsre. A vezrls hatslnca nyitott (3.2. bra).
Vezrl Vezrelt berendezs
3.2. bra. Vezrls hatslnca
Pldaknt tekintsk a laktelepek tvftsi rendszert (3.3. bra). A kls
hmrsklet fggvnyben elrt mennyisg ftanyagot getnek el a
ftmben. A vezetjel a kls hmrsklet, mely alapjn a vezrl be-
rendezs meghatrozza a rendelkez jelet, a ftmben rnknt elge-
tend ftanyag tmegt. Az irnytsi feladat vgs cljt, az egyes lak-
sok bels hmrsklett (az irnytott jellemzt) azonban nem mrjk, az
irnytott jellemz nem hat vissza a ftm mkdsre. A laksok h-
mrsklete mgis megfelel mdon alakul, termszetesen csak ha minden,
a hmrskletre kihat tnyez elre pontosan szmtsba van vve: a
laksokban elhelyezett raditorok mrete a laks nagysgnak, htani ada-
tainak megfelelen van mretezve, a csvek keresztmetszete nem csk-
kent le stb. Ha azonban valaki nyitva felejti az ablakot egy laksban (elre
szmtsba nem vett zavars), akkor annak a laksnak a hmrsklete le-
cskken.
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
35
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
35
Hmr Vezrl
Kazn
Laks
Ftm
C T
h / m
3
3.3. bra. Tvfts vezrlssel
A vezrlsek kztt az albbi eseteket klnbztethetjk meg:
a) Vdelmek. A legegyszerbb vezrlsek. Pldul a laksokban tallhat
kismegszakt zrlat esetn automatikusan megszaktja a villamos
ramkrt.
b) Kvet vezrls. A vezrelt berendezs (folyamat) valamely jellemz-
jt egy msik jellemz fggvnyben vltoztatjuk. Pldaknt szolglhat
az elbb bemutatott tvfts esete, vagy egy msolmar.
c) Programvezrls. A vezrls programjt ipari krlmnyek kztt
specilis szmtgpben, PLC-ben troljk (Programmable Logic Con-
troller). A programvezrls kt fajtjt klnbztetjk meg:
1. Idterv-vezrls. A beavatkozs meghatrozott idfggvny sze-
rint trtnik. Hasonl, mint a kvet vezrls, ha vezetjelknt
idprogramot alkalmazunk. Pldul az automata mosgpek a mo-
ssi, bltsi, centrifuglsi lpsek hosszt idprogramban troljk.
2. Lefut vezrls. A folyamat jabb szakaszai akkor kezddhetnek,
ha az elz szakasz befejezdtt. Pldul az elbbi mosgpnl a
vz ftse akkor kezddhet, ha a tartly teljesen megtelt vzzel. A
moss akkor indulhat, ha a vz felmelegedett stb. A mosgp m-
kdse teht az idterv s a lefut vezrls kombincijn alapul.
3.2.2. Szablyozs
Az irnytott jellemz elrt, illetve pillanatnyi rtknek klnbsgtl
fggen avatkozunk be az irnytani kvnt folyamatba. Szablyozsnl az
irnytott jellemz visszahat az irnytsra, ezrt a szablyozs hatslnca
zrt.
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
36
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
36
A szablyozs alapveten abban klnbzik a vezrlstl, hogy a szab-
lyozott jellemz vissza van vezetve a bemenetre (visszacsatols). A sza-
blyzkr egyszerstett felptst arra az esetre mutatjuk be, mikor nem
egy sszetett folyamatot, hanem csupn egy aktutort kell szablyoznunk
(3.4. bra).
A szablyzkr ebben az esetben a kvetkez rszekbl ll:
a) a szablyozni kvnt berendezs (jelen esetben maga az aktutor), amit
ltalnostva szablyozott szakasznak neveznek
b) a szablyoz berendezs, mely a szablyozott szakasz irnytsra szol-
gl x
b
beavatkoz jelet lltja el, belertve a szksges teljestmnyer-
stst is. A klasszikus analg szablyz a rendelkez jelet ersteni (P),
id szerint integrlni (I) s differencilni (D) tudja.
+
-
xa
xe
xr
Szablyoz Szablyozott szakasz
Szenzor
x xb
3.4. bra. Szablyzkr felptse
c) szenzor, mely a szablyozott szakasz x szablyozott jellemzjt mri s az-
zal arnyos, ltalban villamos x
e
ellenrz jelet szolgltat.
d) klnbsgkpz, mely az alapjel s az ellenrz jel klnbsgt kpezve
az x
r
rendelkez jelet lltja el a szablyoz rszre.
Az x
a
alapjel az az ltalunk elrt jel, mellyel arnyos kimenjelet szeretnnk
elrni a szablyozni kvnt berendezs kimenetn. Ha az alapjel lland
(pl. a fts termosztton belltott hmrsklet), akkor rtktart szablyzs-
rl, ha pedig elrt trvny szerint vltozik (pl. msol mar), akkor kvet
szablyzsrl beszlnk.
Pldnak tekintsk az egyedi fts laksok hmrsklet-szablyoz rend-
szert (3.5. bra). A termosztt a belltott T
a
hmrskletet (alapjel) sz-
szehasonltja a laks tnyleges T hmrskletvel (szablyozott jellemz),
s a klnbsgi jel eljeltl fggen parancsot ad a beavatkozsra, a ft-
anyag elgetsre. Ha most egy ablak nyitva marad, akkor a kazn tbb
gzt get ugyan el, de a laksban a belltott hmrsklet fennmarad.
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
37
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
37
Hmr
Szablyoz
Kazn
Laks
Alapjel
-
+
T
Ta
3.5. bra. Laks hmrskletszablyozsa
A szablyozkr tagjainak tulajdonsgait, azaz a kimen- s bemen jeleik
kapcsolatt az id tartomnyban ltalban differencilegyenlet rja le, mivel
e tulajdonsgok ltalban az idtl is fggenek. A szablyzsi krben lta-
lban sorosan kapcsold tagok mint jelen esetben a szablyz s a sza-
blyozott szakasz ered viselkedst ler sszefggs id tartomnybeli
meghatrozsa nehz, ezrt a differencilegyenleteket szoks n. Laplace-
transzformcival az opertor tartomnyba transzformlni. Az n. opertor
tartomnyban az ered tviteli fggvny a tagok tviteli fggvnyeinek a
szorzata lesz, ami egyszeren meghatrozhat. Mivel azonban tanulm-
nyaink elejn a matematikai ismereteink sem a differencilegyenletek meg-
oldst, sem a Laplace-transzformci alkalmazst nem teszik lehetv, ezrt
a szablyzkr mkdst egyelre csak az llandsult llapot meghatro-
zsra tudjuk bemutatni. Ez esetben a szablyzkr tagjainak tulajdons-
gait, azok kimenetnek s bemenetnek arnyt, egyszer vals szmok
jellemzik.
A kvetkezkben bemutatsra kerl plda egy DC motor fordulatszm
stabilizlsa, ms szval rtktart szablyozsa. Az a feladatunk, hogy a
motor llandsult fordulatszmt tartsuk elrt rtken, fggetlenl a zava-
r hatsoktl. Ez a szablyzsi fajta az n. rtktart szablyzs. Esetnkben
zavarsknt a motort terhel M
t
nyomatkot tekintjk. Ksbbi tanulm-
nyainkban ltni fogjuk, hogy egy lland gerjeszts DC motor statikus
mkdst az
) . ( M B U A
t k
1 3 + =
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
38
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
38
sszefggs rja le. A motor szgsebessge az U
k
kapocsfeszltsg s az
M
t
terhelnyomatk lineris fggvnye. Blokkdiagramban val brzolsa
a 3.6. brn lthat.
A
B
+
Uk
Mt
+
3.6. bra. DC motor statikus viselkedsnek blokkdiagramja
Esetnkben legyen A=100 [1/sV] s B=-500 [1/sNm]. A B egytthat
azrt negatv, mert a fkez nyomatk rtelemszeren cskkenti a szgse-
bessget. A motor szgsebessg-terhelnyomatk jelleggrbit klnbz ka-
pocsfeszltsgekre a 3.7. brn lthatjuk.
[1/s]
100
200
0,1 0,2
0
Mt [Nm]
U
k
=
2
V
U
k
=
1
V
0,3
3.7. bra. lland mgnes DC motor statikus karakterisztikja.
Amint az a tapasztalattal is sszhangban van, a motor szgsebessge az
resjrati szgsebessghez kpest cskken, ha fkez nyomatk hat r. A
jelleggrbe ers lejtse arra utal, hogy a hajts nem merev, mr kis terhel
nyomatkvltozs is jelents szgsebessg vltozst okoz. A motor vezr-
lssel val zemeltetse teht nem lenne megfelel egy magnban, mert a
szalag vltakoz srldsnak hatsra a motor szgsebessge is ersen
ingadozna, a magn nyvogna. A magn kzvetlen vezrlse helyett
prblkozzunk szablyzssal. A motort a 3.8. brn lthat szablyzkr-
be helyezzk. Magt a motort, mint kt bemenet elemet szaggatott vo-
nallal jelltk. A szgsebessget mr szenzort, ami egy tachomter gene-
rtor is lehet, jellemezze V=0,01 V/(1/s) tnyez, ami azt jelenti, hogy a
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
39
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
39
motor =1 (rad/s) szgsebessge esetn x
e
=0,01 V feszltsget ad. A
szablyz az egyszersg kedvrt legyen arnyos (proporcionlis), amit
egy P erstsi tnyezj villamos erst valst meg. A szablyzsi kr
jelei, nevezetesen x
a
, x
e
, x
r
, U
k
mind feszltsg dimenzijak. Hatrozzuk
meg a motor szgsebessgnek s terhel nyomatknak kapcsolatt sza-
blyozs esetn!
P A
B
V
+
-
+
+
Uk
Mt
xa
xe
xr
Motor
3.8. bra. Szablyzkr DC motor fordulatszmnak szablyozsra.
A szgsebessg sszefggst egyszeren megkapjuk, ha a kvetjk hats-
vzlat ltal kijellt mveleteket. A hatsvzlat jobb oldaln jellt szgse-
bessg kt rszbl tevdik ssze: az x
a
alapjel s az x
e
=V ellenrz jel
klnbsge elszr a P-szeres ersts utn az A-szorosra n s bejut egy
sszegzbe. Itt hozzaddik az M
t
zavarjel B-szerese. Kplettel felrva:
) . ( BM PA ) V x (
t a
2 3 + =
Innen a motor szgsebessgt kifejezhetjk:
) . ( M
PAV
B
x
PAV
PA
t a
3 3
1 1 +
+
+
=
A szablyzs tulajdonsgainak kvalitatv vizsglathoz egy tblzatot ksz-
tnk, ahol klnfle P szablyoz belltsoknl s terhel nyomatkoknl
kiszmtjuk a motor szgsebessgt. A lnyeget szem eltt tartva, az alap-
jel legyen minden esetben x
a
=2 V (3.1. tblzat)
Ha a 3.1. tblzat adatait kzs brba rajzoljuk, akkor szembetn el-
trst kapunk a vezrls s a szablyozs kztt (3.9. bra). Mg szablyo-
zs nlkl a karakterisztika ersen lejt, addig szablyzsnl az egyenesek a
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
40
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
40
P ersts nvelsvel a vzszinteshez kzelednek, a szgsebessg alig vl-
tozik a terhel nyomatk fggvnyben.
v
e
z
r
l
s
s
e
l
P=20
P=10
200
100
0,1
0,2
Mt [Nm]
0
P=30
3.9. bra. A szgsebessg vltozsa vezrls s szablyozs esetn.
Ugyanakkor az is megfigyelhet, hogy mg a motor egyszer vezrlsekor
resjratban a clul tztt =200 1/s szgsebessggel forog, addig sza-
blyzs esetn ezt a szgsebessget mg resjratban sem ri el. Ez a tulaj-
donsg alapvet lnyege a szablyzsnak, ami mindig csak szablyzsi elt-
rssel mkdik. rdemes megfigyelni, hogy P nvelsvel a szablyzsi
eltrs egyre cskken, azaz a motor szgsebessge resjratban kzeledik
200 1/s-hoz. Felmerlhet a krds, hogy akkor mirt nem nveljk P rt-
kt mg jobban, ha az a merevsgre s a szablyozsi eltrsre is kedvez
hatssal van? Nos, a P ersts minden hatron tli nvelsnek ltalban a
rendszer stabilitsa szab korltot. A stabilits elvesztsekor a rendszer tar-
tsan lengsbe jn, ami a mkdst lehetetlenn teszi. Ilyen eset fordul
el, mikor az nekes az erstt tl hangosra lltja, s az spolni kezd.
3.1. tblzat
P Mt [Nm]
[1/s]
0 181,8
0,1 177,3 10
0,2 172,7
0 190,5
0,1
188,1 20
0,2 185.7
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
41
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
41
3.2.3. Digitlis szablyozs
A mechatronikai berendezsek irnytsa kizrlag digitlis rendszer,
ezrt rviden szlnunk kell a digitlis szablyzsrl is. A szablyzkr
felptse els rnzsre megegyezik a klasszikus szablyzrendszer felp-
tsvel, a klnbsg a szablyz egysg digitlis mkdsi elvbl fakad
(3.10. bra).
A
D
PC
D
A
Mintavevo-
tart
Digitlis
szablyz
Mintavevo-
tart
Szablyozott
szakasz
G
3.10. bra. Digitlis szablyzkr felptse
A szablyz egy mikroszmtgp, mely termszetesen csak digitlis jele-
ket tud fogadni s kibocstani, ezrt ha a szenzorok analg kimenetek,
akkor azok analg jelt egy A/D analg-digitl konverterrel digitlis jelekk
kell talaktani. A digitalizlshoz az analg jelbl T idnknt egy mintave-
v-tart (Sample and Hold) egysg mintkat vesz. Ezt kveten a mikro-
szmtgp mr kpes a szmtsokat elvgezni: a rendelkez jelbl egy
beprogramozott algoritmus alapjn numerikusan kiszmtja a szablyz
jelet. Mivel tetszs szerinti bonyolultsg programokkal nagyon vltozatos
szablyozsi stratgiik valsthatk meg, a digitlis szablyzs lehetsgei
messze meghaladjk a klasszikus analg PID (proporcionlis-integrl-
differencil) szablyz kpessgeit. Tovbbi elnye a digitlis szablyzs-
nak, hogy a szablyzsi algoritmusok egyszer tprogramozssal knnyen
mdosthatk s a megvltozott ignyekhez illeszthetk. A szablyz digi-
tlis kimen jelt ltalban agy D/A konverterrel vissza kell alaktani ana-
lg jell. (Kivtelt kpeznek a digitlis bemenet aktutorok, mint pl. a
lptetmotor).
A mechatronika alapjai Mechatronikai berendezsek irnytsi rendszere
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
42
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
42
3.2.4. A vezrls s a szablyozs sszehasonltsa
A vezrls s a szablyozs fontosabb tulajdonsgait az albbi tblzatban
foglaltuk ssze:
Jellemz Vezrls Szablyozs
Hatslnc Nyitott Zrt
Irnytsi eltrs Nincs Van
Irnytott folyamat ismerete Szksges Rszben szksges
Megengedett zavars Elre figyelembe vett Tetszleges
Stabilitsi problma Nincs Van
Kltsg, bonyolultsg Kisebb Nagyobb
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
43
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
43
4. A mechatronika mechanikai alapjai
4.1. Kinematikai alapok
A mechatronikai berendezsek a befektetett energia talaktsval, erk s
nyomatkok kzvettsvel mozgsokat hoznak ltre. A dinamikai alapfo-
galmak ismerete ezrt mr a mechatronikai tanulmnyok kezdetn is elen-
gedhetetlen. A kvetkez rszben a mr kzpiskolbl is ismert fogalmak
feleleventsvel foglalkozunk.
A test (tmegpont) kttt mozgsnl egy elrt grbn, a plyn mo-
zog, melynek a vizsglat alatt befutott szakaszt tnak nevezzk. A moz-
gs kt vgpontjt sszekt vektor az elmozduls.
y
x
s
(
t
)
t
p
l
y
a
e
lm
o
z
d
u
l
s
r1
r2
4.1. bra. Plya, t, elmozduls
A plya lehet egyenes vagy grbe. A grbe vonal plyk kzl a krplya
br a legnagyobb jelentsggel.
4.1.1. Egyenes vonal mozgs
a) t
A mozgs sorn a test ltal befutott t az id fggvnyben vltozik:
s=s(t).
b) Sebessg
A mozgs tlagos iramra az tlagsebessg ad felvilgostst, mely hosz-
szabb idszakasz alatt befutott t s a kzben eltelt id hnyadosa:
) 1 . 4 (
t
s
v
tl
=
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
44
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
44
A halad mozgs sebessge pillanatrl pillanatra vltozhat. A pillanatnyi
sebessghez gy jutunk, hogy nagyon kicsiny idszakasz alatt mrjk az
elmozdulst s gy kpezzk az elmozduls s az id hnyadost. Mate-
matikailag ez azt jelenti, hogy a t0 hatrtmenetet kpezzk. A (pilla-
natnyi) sebessg abszolt rtke az t-id fggvny id szerinti els deri-
vltjaknt szmthat:
) 2 . 4 (
s
m
t d
) t ( s d
t
s
lim v
0 t
=
=
A sebessg vektormennyisg, irnya egyenes vonal mozgsnl a plya e
irnyval egyezik meg: e v v = .
Szoksos az id szerinti derivlst fell ponttal jellni: s v = .
c) Gyorsuls
A halad mozgs sebessgnek vltozst a gyorsuls rja le, mely a sebes-
sg-id fggvny id szerinti els derivltja:
) 3 . 4 ( )
s
m
(
t d
) t ( s d
t d
) t ( v d
a
2 2
2
= =
Egyenes vonal mozgsnl a gyorsuls is a plya rintjnek irnyba mutat.
Amennyiben a gyorsuls lland, a mozgst egyenletesen vltoz mozgs-
nak hvjuk. Ekkor hasznlhatjuk a kzpiskolban megtanult sszefgg-
seket az t s a sebessg meghatrozsra:
) . ( t
a
t v s
at v v
4 4
2
2
0
0
+ =
+ =
4.1.2. Tmegpont krmozgsa
a) Elfordulsi szg
A tmegpont r sugar krplyn mozog. A tmegpont helyzett vagy egy-
szeren a (t) elfordulsi szggel, vagy a befutott s=r(t) vhosszal (vko-
ordintval) adjuk meg.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
45
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
45
r
O
= r s
v
e
j
i
4.2. bra. Kerleti sebessg
Kinematikai szmtsoknl a szgelfordulst n. vmrtkben mrjk.
Egy krcikk kzpponti szge a krcikk s vhossznak s a kr sugarnak
hnyadosa:
) . (
r
s
5 4 =
A szgelforduls egysge a radin. Egy radinos az a szg, melynek r hosz-
szsg szgszraihoz tartoz krv hossza szintn r.
Egy teljes krlforduls vmrtkben kifejezett nagysgt a kr kerle-
tnek s sugarnak hnyadosaknt szmthatjuk:
) . (
r
r
r
s
6 4 2
2
= = =
A teljes krlforduls fokban mrve 360, ami vmrtkben kifejezve 2
radin, ezrt 1 radin=360/2=57,3.
b) Kerleti sebessg, szgsebessg
A tmegpont krmozgsnak iramt a kerleti sebessg abszolt rtke
(n. plyasebessg) adja meg, mely a befutott vhossz id szerinti els de-
rivltja:
) . ( r
t
r
t
) r (
t
s
v 7 4
d
d
d
d
d
d
= = = =
Az =d/dt derivltat a szgsebessg abszolt rtknek nevezzk. A
szgsebessg vektormennyisg, vektora a forgs skjra merleges. Az
bra jellseivel k = , ahol k a forgs skjra merleges egysgvektor.
A szgsebessg mrtkegysge rad/s, illetve 1/s.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
46
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
46
Sok esetben, mikor a forgs tengelye egyrtelm s lland helyzet (n.
ll tengely krli forg mozgs) megelgsznk a szgsebessg abszolt
rtknek meghatrozsval is. ltalnossgban is megemltjk, hogy egy-
rtelm s egyszer esetekben eltekintnk a vektoros trgyalsmdtl.
A kerleti sebessg vektormennyisg, minden idpillanatban a krplya
j cos i sin e + = rintjnek irnyba mutat: e r v = . Az e egysg-
vektor hordozza a kerleti sebessg irnyt.
Plda. Mekkora annak az egyenletesen forg motornak a szgsebessge,
mely 2s alatt 30 fordulatot tesz meg?
A szgsebessg defincijt alkalmazva, figyelembe vve, hogy egyen-
letes mozgs esetn s / ,
t t
1 25 94
2
2 30
=
= = =
A szgsebessgnek nem csak a krmozgs jellemzsben van nagyon fon-
tos szerepe, hanem a harmonikus (szinuszos, koszinuszos) periodikus
jelek lersban is.
A harmonikus fggvnyeket tekinthetjk krfrekvencij krmozgs
vetleteknt is. Az y(t)=A sint harmonikus jel vett szgsebessge annak a
krbeforg A amplitd-vektornak az szgsebessge, melynek fggle-
ges vetlete maga a harmonikus jel (4.3. bra).
Mg a mechanikai forg mozgsnl -t szgsebessgnek nevezzk, addig a
harmonikus jel szaporasgt jellemz -t vett szgsebessgnek, vagy kr-
frekvencinak nevezzk.
t
A
) t sin( A
y
t
O
2
4.3. bra. Harmonikus fggvny, mint a forg mozgs vetlete
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
47
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
47
Szoksos az idben szinuszosan vltoz jelet az egyszerbb matematikai
kezelhetsg rdekben komplex fggvnnyel megadni a kvetkezkpp:
) . (
t sin A )) t sin i t (cos A Im( ) Ae Im( ) Ae Im( ) t ( y
t i ) t ( i
8 4
= + = = =
Itt 1 = i a kpzetes egysg. A komplex szmskon az A abszolt rt-
k komplex szmot brzol vektor vzszintessel bezrt szge =t, va-
gyis a vektor szgsebessggel forog. A komplex szm kpzetes rszt
(fggleges sszetevjt) tekintjk megoldsnak (4.4. bra).
i
Ae
sin A
Im
Re
cos A
y
t
O O
4.4. bra. Az elmozduls megadsa komplex szmmal
Az krfrekvencia nem tvesztend ssze az f (Hz) frekvencival, mely
periodikus folyamatok msodpercenknti ismtldsnek szmt adja
meg. A krfrekvencia, frekvencia s peridusid kapcsolata az albbi:
) . ( f
T
9 4 2
2
= =
c) Gyorsuls, szggyorsuls
A kerleti sebessg irnya s nagysga az id fggvnyben vltozik, azrt
a gyorsuls a szorzatfggvny derivlsi szablya miatt a kvetkez ssze-
fggssel szmthat:
) . (
t
e
r
t
e r
t
) e r (
a 10 4
d
d
d
d
d
d
+ = =
Az els tag a sebessg abszolt rtknek vltozst kifejez rint irny
gyorsuls, mely rint irny (4.5. bra):
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
48
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
48
r
O
e
n
ae
4.5. bra. Krmozgs rint irny (tangencilis) gyorsulsa
) . ( e r a
e
11 4 =
Az sszefggsben szerepl dt / d = derivlt a test szggyorsulsa. A
szggyorsuls mrtkegysge rad/s
2
, vagy 1/s
2
.
A (4.10) kifejezs msodik tagja, a norml irny (centripetlis) gyorsu-
lskomponens, a sebessg irnynak vltozsbl szrmazik s a krplya
kzppontja fel mutat (4.6. bra):
) . ( n r ) j sin i cos ( r
t
) j cos i sin (
r a
n
12 4
d
d
2
= =
+
=
r
O
e
n
an
j
i
4.6. bra. Krmozgs norml irny (centripetlis) gyorsulsa
Amennyiben krmozgsnl a kerleti sebessg nagysga is vltozik, akkor
mindkt gyorsulskomponens zrustl klnbz rtk. A test gyorsul-
sa a kt gyorsulskomponens vektori eredje.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
49
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
49
Plda. Mekkora az R=0,1 m sugar trcsa kerleti pontjnak gyorsulsa
az indulstl szmtott 0,5 s mlva, ha a trcsa 5 s alatt egyenletesen gyor-
sulva ri el a msodpercenknti 50 fordulatszmot?
A trcsa maximlis szgsebessge
s / ,
max
1 8 62
5
2 50
=
=
A trcsa szgsebessge t + =
0
trvnyszersg szerint alakul egyen-
letesen vltoz mozgsnl. Innen a szggyorsuls
. s / ,
,
t
2 0
1 56 12
5
0 8 62
=
=
A kerleti pont rint irny gyorsulskomponense
2
256 1 56 12 1 0 s / m , , , R a
e
= = =
a normlirny gyorsulskomponens pedig
2 2 2
0
2
94 3 5 0 56 12 0 1 0 s / m , ) , , ( , ) t ( R ) t ( R a
n
= + = + = =
A pont ered gyorsulsa
2 2 2 2 2
14 4 94 3 256 1 s / m , , , a a a
n e
= + = + =
4.2. Kinetikai alapok
Minden dinamikus folyamat alapjt Newton II. aximja, a dinamika
alaptrvnye jelenti, mely tmegpontra, halad mozgs esetn
) . ( a m F
i
13 4
=
alak. A II. axima teremt kapcsolatot a mozgsllapot-vltozst okoz
er s a gyorsuls kztt. Az egyenlet bal oldaln a testre hat erk ered-
je ll. Amennyiben az ered er nem zrus, akkor a test a gyorsulssal
mozog. Ha az ered er zrus, akkor a test egyenslyban van s gyorsulsa
zrus. A zrus gyorsuls azt jelenti, hogy nem vltozik a test sebessge.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
50
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
50
ll tengely krl forg merev testre a dinamika alaptrvnye, a for-
gmozgs alapegyenlete
) . ( J M
i
14 4
=
alak. Forg mozgsnl a gyorsuls szerept a szggyorsuls, a tmeg
szerept a J forgstengelyre szmtott tehetetlensgi nyomatt veszi t.
4.2.1. Munka
Az er munkt vgez, ha tmadspontja elmozdul.
A vgzett munka az ervektor s az elmozduls vektor skalris szorzata
= r d F W (4.7. bra)
F
e
dr
ds
Fe
F
Fn
4.7. bra. Er munkavgzse
Kifejtjk a kt vektor skalris szorzatt s alkalmazzuk az cos F F
e
=
s ds e r d = valamint ds r d = sszefggseket:
) 15 . 4 ( J , Nm s d F r d cos F r d F W
e
= = =
A munka teht az elmozduls s az er elmozduls irny komponens-
nek szorzata, W=F
e
ds
Az elmozduls irny erkomponens s az elmozduls rtelmtl fggen
a munka eljele lehet pozitv, vagy negatv.
Fontos megjegyezni, hogy amennyiben az er s tmadspontjnak el-
mozdulsa merleges egymsra, nincs munkavgzs!
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
51
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
51
Nem csak er, hanem nyomatk is vgezhet munkt. Kis ideig minden
mozgs elkpzelhet forg mozgsknt is (4.8. bra), ezrt helyettestsk
R
Fe
ds
M
d
4.8. bra. Nyomatk munkja
(4.15) sszefggsbe F
e
=M/R s ds=Rd kpleteket. A nyomatk ltal
vgzett munka gy
= = = ) . ( M R
R
M
s F W
e
16 4 d d d
Plda. Mekkora munkt vgznk, mikor egy csavart kt teljes fordulat alatt
nullrl M
max
=1,5 Nm-ig linerisan vltoz nyomatkkal hzunk meg?
Az elfordulsi szg 4 radin. Az elfordulsi szg fggvnyben vlto-
z nyomatk miatt a munkt integrlssal kell meghatrozni. Az integrls
geometriai jelentse szerint
d ) ( M az M() fggvny alatti terlet
kiszmtst jelenti (4.9. bra):
Nm ,
, M
W
max
42 9
2
4 5 1
2
=
= =
Mmax
M
4
W
4.9. bra. Munka meghatrozsa grafikus integrlssal
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
52
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
52
4.2.2. Teljestmny
Nem mindegy, hogy bizonyos munkt mennyi id alatt tudunk elvgezni.
Teljestmny alatt az egysgnyi id alatt vgzet munkt rtjk. Az tlagtel-
jestmny a hosszabb id alatt vgzett munka s az id hnyadosa:
) 17 . 4 ( W
t
W
P
tl
=
A teljestmnynek is rtelmezhet pillanatnyi rtke
t
) t ( W
P
d
d
= alakban,
mely halad mozgsnl az er s a pillanatnyi sebessg szorzata:
) . ( v F s F
t
P
e e
18 4 d
d
d
= =
Forg mozgs pillanatnyi teljestmnye
) . ( M M
t
P 19 4 d
d
d
= =
a nyomatk s a pillanatnyi szgsebessg szorzata.
Plda. Mekkora az aut motorjnak teljestmnye, ha v=120 km/h sebes-
sggel haladva a kzegellenlls 1100 N?
A teljestmny (4.18) kplett alkalmazva halad mozgsra
W
,
v F P
e
36666
6 3
120
1100 = = =
4.2.3. Mozgsi energia
A testek sebessgk rvn kpesek energit trolni. rjuk t Newton II
aximjt a kvetkez skalris alakra, mikzben a v(s(t)) fggvny id
szerinti derivlsakor a kzvetett fggvny derivlsi szablyt alkalmaz-
zuk:
) 20 . 4 (
s d
v d
mv
t d
s d
s d
v d
m
t d
)) t ( s ( v d
m ma F
e e
= = = =
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
53
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
53
A vltozkat szeparljuk, majd mindkt oldalt integrljuk:
) 21 . 4 ( v d mv s d F
e
=
Az integrlst 1 s 2 hatrok kztt elvgezve
) 22 . 4 ( E E
2
mv
2
mv
W
1 2
2
1
2
2
= =
addik. Az sszefggs munka-ttel nven ismert s azt fejezi ki, hogy a
vizsglt testre hat erk ltal vgzett munka a test mozgsi energijnak
vltozst okozza.
ltalnossgban az E
mv
=
2
2
tagot mozgsi energinak nevezzk.
Forg mozgsnl a mozgsi energit forgsi energinak nevezzk s az
) 23 . 4 (
2
J
E
2
f
=
sszefggssel szmtjuk, ahol J a forg test forgstengelyre szmtott te-
hetetlensgi nyomatka (pldul lendkerknl J=mR
2
/2).
4.2.4. Helyzeti energia (potencil)
A Fld a testekre gravitcis ert fejt ki anlkl, hogy rintkezne velk. A
Fldnek n. gravitcis ertere van.
Plda. Hatrozzuk meg a gravitcis ertr munkjt klnbz, az A
pontbl v
0
kezdsebessgekkel, klnbz alkalmasan vlasztott
i
szgek
alatt elhajtott golykra, melyek mind a B pontba jutnak (4.10. bra)!
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
54
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
54
g1
g2
g3
A
B
b
H
v0
y0
y1
x 0
4.10. bra. Ferde hajts
A ferde hajtst vzszintes s fggleges mozgsra bontva a kvetkez
skalris egyenleteket kapjuk:
Vzszintes irny egyenletes mozgs: t v x x
x 0 0 1
+ =
cos v
b
t t ) cos v ( b
0
0
= =
Fggleges irny egyenletesen vltoz mozgs:
2
0 0 1
2
t
g
t v y y
y
+ =
2
0 1 1
2
t
g
t ) sin v ( ) H y ( y + + =
Az id behelyettestsvel:
) . ( H )
cos
sin b
cos v
gb
(
cos v
gb
cos v
b
) sin v ( ) H y ( y
24 4
2
2
2
2
0
2
2
2
0
2
0
0 1 1
=
+ + =
A kapott (4.24) sszefggsnek kell teljeslnie ahhoz, hogy az elhajtott
test thaladjon a B ponton. Erre a zrjelbe tett sszefggsre mg szk-
sgnk lesz a tovbbiakban.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
55
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
55
Szmtsuk ki az ertr ltal vgzett munkt v
0
kezdsebessg s haj-
lsszg ferde hajts esetn az A s B pont kztt a munkattellel! A
W=E
1
-E
0
sszefggst alkalmazva a kvetkez egyenletet kapjuk:
=
+ = =
2
0
2
0
0
2
0
2
0
2
1
2 2 2 2
v
m
)
cos v
b
g sin v ( ) cos v (
m
v
m
v
m
W
mgH )
cos
sin b
cos v
gb
( mg = =
2
2
0
2
2
Az utols zrjelben ppen a B ponton val thalads (4.24) felttele ll. A
levezets eredmnybl fontos kvetkeztetst vonhatunk le:
A nehzsgi ertr ltal vgzett munka csak a kezd s vgpont magas-
sgklnbsgtl fgg, a plyagrbe alakjtl nem! Az ilyen tulajdonsg
erteret konzervatv ertrnek nevezzk. Konzervatv ertrnek ltezik a
W U d d = sszefggssel definilt potencilja, ahol dW az ertr ltal
vgzett munka.
Plda. Egy G=mg=10N sly testet magra hagyva a nehzsgi ertr a
h
0
=3m magassg A pontbl a h
1
=1m magassg B pontba mozgatja
(4.11. bra). Mekkora az ertr potenciljnak vltozsa?
-mgj
h0
h1
y
4.11. bra. Potencilvltozs szabadess sorn
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
56
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
56
A kt pont kztti potencilklnbsg a trer negatv munkjaknt sz-
mthat:
Nm ) h h ( mg ) j y )( j mg ( U U
h
h
20 d
0 1 0 1
1
0
= = =
A potencil megvltozsa negatv, teht a test potencilja (helyzeti energi-
ja) cskkent.
4.2.5. A trer s a potencilfggvny kapcsolata
Ha az ertr ltal kifejtett F=F(x) er fgg a helytl, akkor a potencil
vltozsa
) 25 . 4 ( d ) x ( F W U
= = x
lesz. Mindkt oldalt az elmozduls szerint derivlva nyerjk az ertr ltal
x irnyba kifejtett ert:
) 26 . 4 (
x d
U d
F
x
=
Amennyiben az ertr ltal kifejtett er nem csak x, hanem y s z koordi-
ntktl is fgg, az egyes koordinta-irnyokba kifejtett ert hasonl m-
don nyerjk. Az ered er
U U ) k
z d
d
j
y d
d
i
x d
d
( ) k
z d
U d
j
y d
U d
i
x d
U d
( F = + + = + + =
A zrjelbe tett kifejezst nabla-opertornak () hvjk. Az egyenlet
U F = alakban is rhat. Az imnt bemutatott elv gyakorlati alkalmaz-
sa nagy jelentsg, mert pldul az elektromgnesek ltal kifejtett ert a
mgneses ertr potencilfggvnybl szmtjuk.
Plda. Rug erternek potencilfggvnye
2
2
cx
) x ( U = alak, ahol c a
rugmerevsg, x a rug hosszvltozsa. Hatrozzuk meg a rug ltal kifej-
tett ert a rug tetszleges x hosszvltozsnl!
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
57
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
57
A rug erternek potencilfggvnye egyvltozs (csak x-tl fgg), ezrt
cx x
c
x
) x ( U
F
x
= = = 2
2 d
d
A rug (ertere) teht a rug megnylsval arnyos, azzal ellenkez r-
telm ert fejt ki a testre.
x
Fx
c
c
x
Fx
4.12. bra. Rug ltal kifejtett er.
4.2.6. A mechanikai energia megmaradsnak elve
Alkalmazzuk a potencil defincis egyenletben a trer munkjnak ki-
szmtsakor a munka-ttelt:
E d W d U d = =
Integrlva mindkt oldalt
) E E ( U U
0 1 0 1
=
addik, aminek trendezsvel a mechanikai energia megmaradsnak
ismert sszefggst nyerjk:
) 27 . 4 ( lland U E U E
0 0 1 1
= + = +
Konzervatv ertrben a test mozgsi s helyzeti (potencilis) energijnak
sszege brmely pontban lland, amennyiben ms (a konzervatv ertr-
hez nem tartoz, pldul srld) er nem hat a testre.
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
58
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
58
Plda. Fgglegesen v
0
=30 m/s kezdsebessggel fellvnk egy petrdt.
Mekkora magassgig emelkedik, ha a kzegellenllst elhanyagolhatjuk?
Ilyen felttelezs mellett csak a nehzsgi ertr hat a testre. Vlasszuk
a potencilis energit zrusnak az alapszinten. A plya tetpontjban vi-
szont a test mozgsi energija lesz zrus. Az energia megmarads elvt
alkalmazva
0
2
0
2
0
1
+ = +
mv
mgh
ahonnan
m
g
v
h 45
20
30
2
2 2
0
1
= = =
Az energia megmaradsnak elvt vesztesg nlkli, stacioner folyadkos
rendszerekre a Bernoulli-egyenlet fejezi ki, mely
) . ( lland h
g
v
g
p
28 4
2
2
= + +
alakban rhat fel.
Plda. Egy p
t
=210
5
Pa tlnyoms tartlyban 1m magas a vzszint (4.13.
bra). Mekkora a kiraml vz sebessge, ha az ramlsi vesztesgektl
eltekintnk?
1
2
1
pt
h1
v2
4.13. bra
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
59
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
59
A kvetkez rtkeket helyettestjk a Bernoulli-egyenletbe: p
1
=p
t
+p
0
,
v
1
=0, h
1
=1 m, p
2
=p
0
, h
2
=0.
Az 1 s 2 pontra felrjuk az energik egyenlsgt:
0
2 2
0
2
2 0
1
0
+ + = + +
+
g
v
g
p
h
g g
p p
t
.
Innen a keresett kimlsi sebessg
s / m ,
p
gh v
t
5 20
1000
10 4
20
2
2
5
1 2
=
+ = + =
4.2.7. A potencilis energia minimumra trekvsnek elve.
Szabadon elmozdulni kpes rendszerek olyan llapot felvtelre treksze-
nek, melyben a rendszer potencilis energija minimlis. Az elvet egy hid-
raulikus rendszeren mutatjuk meg. Legyen kt egyforma A felszn tartly
alul csvezetkkel sszektve (4.14. plda). A folyadkszint gy ll be,
hogy mindkt tartlyban azonos lesz a folyadkoszlop H magassga.
Megmutatjuk, hogy a rendszer potencilis energija ekkor minimlis.
H
h
h
A
A
U=0
H-h
G1
2
h H +
G2
4.14. bra. Hidraulikus rendszer energija
Ttelezzk fel, hogy valamilyen oknl fogva a rendszer olyan helyzetet
foglal el, hogy a bal oldali tartlyban a folyadk szintje H+h, a jobb oldali
tartly folyadkszintje H-h, a folyadk trfogatnak llandsgt fenntart-
va. A rendszer sszes potencilis energija, ha a potencil alapszintjnek a
tartlyok aljt vlasztjuk:
) h H ( g A
) h H (
g ) h H ( A
) h H (
g ) h H ( A U
2 2
2 2
+ =
+
+
+ =
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
60
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
60
Az sszefggsbl knnyen felismerhet, hogy a rendszer potencilis
energija akkor minimlis, amikor h=0. A folyadk teht olyan egyenslyi
llapot elrsre trekszik, mikor a kt tartly folyadkszintje azonos.
Sok bonyolult mszaki feladat megoldsnl hasznlhat a rendszer
energijnak minimumra trekvse. Pldul egy membrn deformldott
alakjnak meghatrozsakor a membrn alakjt addig prblgatjk (vari-
ljk), mg a rendszer alakvltozsi energija minimlis lesz.
4.2.8. Harmonikus rezgmozgs
Az elz pldnl maradva, ha a tartlyokban lv folyadk szintje nem
azonos, akkor olyan folyadkramls indul meg, ami a szintek kiegyenlt-
dst igyekszik elsegteni. Amint a folyadk mozgsba jn, mozgsi ener-
gira is szert tesz az energia megmaradsnak elve szerint. Amikor a tart-
lyok folyadkszintjei ppen megegyeznek (a rendszer potencilis energija
minimlis), a folyadk mozgsi energija maximlis rtket r el, vagyis
nem kpes egyenslyi helyzetbe kerlni, mert tehetetlensge kvetkezt-
ben tllendl az egyenslyi helyzeten. gy egy periodikus folyadkszint
vltozsi folyamat indul be. A harmonikus rezgmozgs mozgsegyenlett
egy c merevsg rugbl s m nagysg tmegbl ll lengrendszer ese-
tben hatrozzuk meg.
Lengrendszer sajtrezgsei
Elszr tekintsk a rendszer szabad rezgseit (n. sajtrezgst), amit a
rendszer az egyenslyi helyzetbl val kitrts utn magra hagyva sza-
badon vgez.
F=cy
y
0
m
t
e
r
h
e
l
e
t
l
e
n
h
o
s
s
z
c
4.15. bra. Lengrendszer
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
61
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
61
A mozgsegyenlet felrshoz alkalmazzuk a
=
y yi
ma F sszefggst.
Fggleges irnyban csak a cy nagysg, lefel mutat ruger hat a testre,
mely az egyenslyi helyzetbe akarja a golyt visszatrteni. A mozgs-
egyenlet a kvetkez:
) 29 . 4 ( . 0 cy y m y m cy = + =
Vezessk be az m c =
2
jellst, ahol a rendszer sajtrezgseinek kr-
frekvencija (vett szgsebessge).
rdemes megfigyelni, hogy a harmonikus rezgmozgs vett szgsebes-
sgt szabad mozgs (sajtrezgs) esetn nem -val, hanem -val jelljk.
A mozgsegyenlet
) 30 . 4 ( 0 y y
2
= +
alakot lt. Ez egy homogn, lineris, msodrend, lland egytthats
differencilegyenlet. Megoldst ttelezzk fel
) 31 . 4 ( ) t sin( A y + =
alakban. A ktszeri derivls eredmnyeknt ) t sin( A y
2
+ = ad-
dik, amit az egyenletbe visszahelyettestve azonossgot kapunk, teht a
felttelezett megolds helyes. Az ismeretlen A amplitdt s fzisszget
a kezdeti felttelekbl tudjuk meghatrozni.
Plda. Az 4.16. brn lthat lengrendszer az m=1 kg tmeg testbl s
a c=10
4
N/m merevsg rugbl ll. Hatrozzuk meg a tmeg mozgs-
egyenlett, ha az induls pillanatban y
0
=0,01 m s v
0
=2 m/s!
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
62
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
62
F=cy
A
y
0
t m
y(t)
v
0
4.16. bra
Elszr a rendszer sajtrezgsnek krfrekvencijt hatrozzuk meg:
. s / rad
m
c
100
1
10
4
= = =
A kezdeti feltteleket a 4.31 egyenletbe helyettestjk t=0 figyelembe vte-
lvel:
Az elmozduls: ) sin( A , + = 0 01 0
A sebessg: ) cos( A + = 0 2
A kt egyenletbl elszr a kezd fzist fejezzk ki:
rad , ,
,
tg 46 0 5 0
2
01 0
= = =
A rezgs amplitdja az els egyenletbl szmtva:
m ,
, sin
,
sin
,
A 022 0
46 0
01 0 01 0
= = =
A tmeg mozgsegyenlete 4.31 szerint rhat fel:
) 46 , 0 t 100 sin( 022 , 0 y + =
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
63
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
63
Gerjesztett rezgsek
lesen meg kell klnbztetnnk azt a msik esetet, mikor a rezgseket
folyamatosan knyszertjk r a rendszerre (4.17. bra), pldul a rug bal
oldali vgnek periodikus t sin X
x
g g
= trvny szerinti mozgatsval
(tgerjeszts), vagy a tmegre hat periodikus t sin F
F
g g
= ervel
(ergerjeszts). Az
g
X
illetve
g
F
kalap jells az t, illetve er cscs-
rtkt, amplitdjt jelenti. A tmeg llandsult llapotban szintn a ger-
jeszts krfrekvencijval vgzi t sin X
x = sszefggs szerinti moz-
gst.
terheletlen hossz
xg
Fg
x
terheletlen hossz
x
tgerjeszts Ergerjeszts
4.17. bra. Gerjesztett rezgsek ltrehozsa
A rezgs X
amplitdjt ergerjeszts esetre hatrozzuk meg. A
x
xi
ma F
= egyenlet a kvetkez lesz:
) 32 . 4 ( F cx x m ma F cx
g x g
= + = +
A gerjeszts bekapcsolsa utn kzvetlenl kialakul bonyolult tmeneti
rezgsllapottal, az n. tranziens rezgsekkel most nem foglalkozunk. A
rezg tmeg llandsult mozgst t sin X
x = alakban ttelezzk fel. Az id
szerinti derivlst elvgezve s a 4.32 mozgsegyenletbe helyettestve
) . ( t sin F
t sin X
c t sin X
m
g
33 4
2
= +
addik. Innen a tmeg rezgsamplitdja
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
64
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
64
) . (
c
F
c
m
c
F
m c
F
N
g g g
34 4
1
1
1
1
2
2
2
lesz. rdemes megfigyelni a msodik trt viselkedst az N nagytsi
tnyezt , mely a rendszer sajtfrekvencijnak s a gerjeszts kr-
frekvencijnak fggvnye. Amennyiben a gerjeszts krfrekvencija meg-
egyezik a rendszer sajtfrekvencijval, a trt nevezje zrus lesz, ezrt
vgtelen nagy rezgsamplitdk alakulnak ki. Ez a rezonancia esete (4.18.
bra).
INI
/
1
1
(=)
4.18. bra. Rezonanciagrbe
A harmonikus rezgmozgs a mechatronikai berendezsekben gyakori
jelensg a mozgatott testek tmegnek s rugalmassgnak kvetkeztben.
Plda. Az elz pldban bemutatott lengrendszerre hasson
t sin F
g
50 200 = harmonikus ergerjeszts (4.17. bra). Hatrozzuk meg
a kialakul lengsek amplitdjnak nagysgt llandsult esetben!
A gerjeszts kpletbl kiolvashat, hogy N F
g
200 = s =50 rad/s.
Ha az
g
F
ert statikusan mkdtetnnk a rugra, akkor az
m ,
c
F
x
g
st
02 0
10
200
4
= = =
A mechatronika alapjai A mechatronika mechanikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
65
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
65
megnylst okozna. Amennyiben a terhels krfrekvencij harmonikus
fggvny, a kitrs a statikus kitrs N-szerese lesz. A nagytsi tnyez
rtke:
33 , 1
100
50
1
1
1
1
N
2 2
=
=
A tmeg llandsult mozgsnak egyenlete teht
) t 50 sin( 02 , 0 33 , 1 ) t ( x =
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
66
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
66
5. Szenzorok s aktutorok fizikai
alapjai
5.1. Mgnessg a mechatronikban
Ebben a fejezetben az aktutorok mkdshez elengedhetetlenl szks-
ges erhatsok ltrehozsnak villamos alapelveivel foglalkozunk. A m-
kdsi elv tekintetben lesen meg kell klnbztetnnk az elektromgne-
ses s az elektrodinamikus talaktkat (5.1. tblzat).
5.1. tblzat. Elektromgneses erkelts
Elektromgneses
erkelts
Elektrodinamikus
erkelts
Erkelts Reluktancia-er LORENTZ-er
Jellemz Test (vasdarab) a mgneses
teret permeabilitsa ltal
megvltoztatja. Er kzvet-
lenl a testre hat.
rammal tjrt vezet mg-
neses ertrben. Er a veze-
tben raml tltshordo-
zkra hat.
Pldk Behz mgnes, rel, lpte-
tmotor
Elektromos motorok,
linermotor, hangszr
5.1.1. Mgneses tr
Mgneses trer
Ha egy vezetben ram folyik, akkor a kzelbe helyezett kis irnyt hat-
rozott irnyba ll be. Ha a mgnestt a vezetre merleges skban kln-
bz pontokba helyezzk, akkor azt tapasztaljuk, hogy a t llsait burko-
l grbk a vezett koncentrikusan krlvev krk. A ksrletbl megl-
lapthat, hogy az ram mgneses teret ltest maga krl. Szoksos a
mgneses erteret ervonalakkal brzolni.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
67
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
67
I1
D
H
H
5.1. bra. ramvezet s lland mgnes mgneses tere
Az ervonal olyan grbe, melynek brmely pontjban hzott rintje az
ertr ltal kifejtett er irnyba mutat, az er nagysga pedig arnyos az
ervonalak srsgvel (gradiensvel). Hasonl ez a trkpek szintvonala-
ihoz, ahol a szintvonalak srsdse nagyobb meredeksgre utal. ram-
mal tjrt vezet krl az ervonalak zrt grbk, viszont lland (perma-
nens) mgnes esetben az ervonalak a plusokba futnak (5.1 bra).
A mgneses ertr szmszer jellemzsre kt vektormennyisget
hasznlunk attl fggen, hogy mi a clunk. Ha az ertr ltrehozshoz
szksges gerjesztst akarjuk meghatrozni, akkor a H mgneses trervel,
ha az ertr ltal kifejtett ert szeretnnk kiszmtani, akkor a B mgneses
indukcival szmolunk.
Elszr egyetlen vezetben foly ram ltal keltett mgneses tr vizs-
glatval foglalkozunk. A mgneses trer az I
1
rammal tjrt vgtelen
hossz vezettl r tvolsgra fggetlenl a teret kitlt anyag minsg-
tl a sugr mentn lland s a levezets mellzsvel a
1
(5.1)
2
I A
H
r m
=
sszefggssel szmthat. Vegyk szre, hogy a nevezben a vezett
krlfog r sugar kr kerlete ll. Az sszefggst a gyakorlatban fordt-
va, az adott nagysg trert ltrehoz ramerssg meghatrozsra
hasznljuk. Bonyoltja a helyzetet, hogy a vezett ilyenkor ltalban nem
kr alak grbe mentn jrjuk krl. A krljrsi grbe pontjai klnb-
z tvolsgra vannak a vezettl, ezrt a trerssg pontrl-pontra vlto-
zik (5.2. bra). A kvetkez gondolatmenet azonban eredmnyre vezet.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
68
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
68
A g krljrsi grbt felosztjuk szakaszonknt lland r
1
, r
2
,r
i
sugar
krvekre, melyek hosszai rendre s
1
=r
1
1
, s
2
=r
2
2
, s
i
=r
i
s
i
, majd
megszorozzuk az ott lv H
1
,H
2
,...H
i
trerssgekkel s a szorzatokat sz-
szeadjuk:
) . ( s H s H ... s H s H I
i i i
2 5
1 2 2 1 1 1
= + + + =
A felosztst finomtva, vagyis a sds hatrtmenetet elvgezve az
) . ( Hds I
g
3 5
1
=
I1
Hi(r i)
r i
g
s1
r1
H1(r 1)
5.2. bra. A gerjeszts szmtsa.
sszefggsre jutunk, melyet GERJESZTSI TRVNYNEK szoks
nevezni. Az sszefggs akkor is igaz, ha tbb rammal tjrt vezett j-
runk krbe egy zrt vonal mentn (5.3. bra). Pldul egy N menetszm
tekercs esetn, mivel minden menetben ugyanakkora I erssg ram fo-
lyik, az ered gerjeszts az egy menet ltal keltett gerjeszts N-szerese
) 4 . 5 ( ampermenet , A I N Hds
= =
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
69
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
69
H1
g1
g2
l
H2
H
5.3. bra. Tbbmenet tekercs (szolenoid) mgneses tere
Plda. Hatrozzuk meg az 5.3. brn lthat tekercs belsejben a mgne-
ses trer kzelt rtkt!
A tekercs bal oldali, a knyv skjbl kifel halad ramait a g
1
grbe
mentn jrjuk krl. Tapasztalat szerint a tekercs hossztengelyvel prhu-
zamos ervonal mentn szimmetria okok miatt a H
1
trer kzeltleg
lland. A g
1
grbe hossza j kzeltssel s=2l (a tekercs vgeinl az er-
vonal hosszt a tekercs hosszhoz kpest elhanyagolva). A gerjesztsi tr-
vnybl
l
NI
H
2
1
=
Hasonl megfontolssal a tekercs jobboldali ramaira alkalmazva a ger-
jesztsi trvnyt H
2
=H
1
addik. A tekercs belsejben az ered trer:
l
NI
H H H = + =
2 1
A mgneses tr a klnbz mgneses tulajdonsg anyagokra ms-ms
erhatst fejt ki. Az anyag mgneses tulajdonsgt a permeabilitssal
vesszk figyelembe. Szoksos a permeabilitst a vkuum
0
=410
7
(Vs/Am) permeabilitsra vonatkoztatni s a
r
0
= sszefggssel
szmtani, ahol
r
az illet anyag vkuumra vonatkoztatott relatv perme-
abilitsa.
Mgneses indukci
A mgneses tr msik, az erhatsok szmtsnl hasznlt jellemzje a B
mgneses indukci. A mgneses indukci a trerhz hasonlan vektor-
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
70
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
70
mennyisg. Megjegyzend, hogy B s H kapcsolata a gyakorlatban hasz-
nlt ferromgneses anyagokra (vas, nikkel, kobalt) csak korltozott tarto-
mnyban tekinthet linerisnak s az anyag ellettl is fgg:
(5.5) ,..) t , H ( H B =
A trert nvelve a ferromgneses anyag elemi kis mgneses diplusai
egyre jobban bellnak a trer irnyba. A trer egy bizonyos hatron tli
nvelse mr nem eredmnyez tovbbi indukcinvekedst az anyag tel-
tdse szaturcija kvetkeztben
.
H
B
szaturci
l
i
n
e
a
r
i
z
l
t
5.4. bra. Hiszterzisgrbe
A mgneses jelensgekkel kapcsolatos szmtsokban fontos szerepet jt-
szik a B indukcinak egy adott A felletre vonatkoz hatsa, a mgne-
ses fluxus. A fluxust inhomogn indukci esetben a kvetkez sszefg-
gssel szmtjuk:
) 6 . 5 ( Wb Vs BdA
A
= =
Homogn mgneses trben az integrls =BA szorzsra egyszersdik.
5.1.2. Egyszer mgneses krk
Mgneses kr keletkezik akkor, ha a ferromgneses anyagok gy vannak
elrendezve, hogy nagy permeabilitsuk kvetkeztben a mgneses ervo-
nalak fknt a ferromgneses anyagban haladnak. A statikus mgneses
krk vizsglatnak egyik legfontosabb clja a lgrsben lv indukci
ltrehozshoz szksges gerjeszts meghatrozsa. Ugyancsak fontos
krds az elektromgnesek behz erejnek meghatrozsa.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
71
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
71
A mgneses krk szmtsnl az albbi egyszerst feltevsekkel
lnk:
a mgneses tr a vasban homogn (a vas keresztmetszete kicsi)
a lgrs a vas szlessghez kpest kicsi.
Ilyen felttelek esetn a mgneses indukci a vasban s a lgrsben meg-
egyezik:B
v
=B
l.
A villamos s mgneses krk analgija
Alkalmazzuk a gerjesztsi trvnyt az 5.5. brn lthat mgneses krre!
lv
i
ll
A
Rv
Rl
a)
b)
g
5.5.bra. Mgneses kr s helyettest kapcsolsa.
Az N menet tekercs gerjesztst gy kapjuk, hogy tekercset a zrt g grbe
mentn krljrjuk, mikzben a trert integrljuk:
) 7 . 5 ( NI l H l H Hds
l l v v
= = + =
Helyettestsk 5.7-be a H=B/ s B=/A sszefggseket, akkor a
) 8 . 5 ( )
A
l
A
l
(
l l
l
v v
v
=
egyenletet kapjuk. Vezessk be a mgneses ellenlls (reluktancia) fogalmt
a vezet l/A ellenllshoz hasonlan az albbiak szerint:
) 9 . 5 ( ) Vs / A (
A
l
R
m
=
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
72
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
72
Az j jellssel a mgneses kr egyenlete a kvetkez lesz:
) 10 . 5 ( U I R ) R R (
ml mv
= = +
Vegyk szre, hogy a soros villamos ramkr analg megfeleljt kaptuk.
A fluxus megfelel az ramerssgnek, a gerjeszts a feszltsgnek, a vas-
mag s a lgrs mgneses ellenllsa pedig a villamos ellenllsnak.
Plda. Egy egyszer, szimmetrikus mgneskr vasmagja lland vastags-
g, egyes rszeinek hossza a=0,05 m, b=0,04 m, a lgrsek hossza l
l
=0,002
m. A kzps oszlop keresztmetszete A
o
=1,5 cm
2
, a tbbi rsz kereszt-
metszete A=1 cm
2
. A vasmag relatv permeabilitsa
r
=800. Mekkornak
kell lenni a kzps oszlopon helyet foglal tekercs gerjesztsnek, ha a
lgrsekben B=0,6 T mgneses indukcit szeretnnk ltrehozni?
A kzps oszlop mgneses ellenllsa az (5.9) sszefggs szerint
s
1
331740
800 10 4 10 5 , 1
05 , 0
A
a
R
7 4
r 0 0
mo
=
=
=
.
Hasonlan a szls keretek mgneses ellenllsa kln-kln
s
1
1273885
800 10 4 10
002 , 0 08 , 0 05 , 0
A
l b 2 a
R
7 4
r 0 0
l
mv
=
+
=
+
=
.
A lgrsek mgneses ellenllsa kln-kln
s
1
15923566
1 10 4 10
002 , 0
A
l
R
7 4
r 0 0
l
ml
=
=
=
.
R
l
R
l
R
o
R
v
R
l
R
l
R
v
R
o
II
R
2
R
v
R
v
R
o
A szls g s a lgrs mgneses ellenllsnak soros eredje:
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
73
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
73
. s / 1 17197451 15923566 1273885 R R R
l v ms
= + = + =
A szls gak prhuzamos eredje
. s / 1 8598725
2
17197451
2
R
R
s
mII
= = =
A mgneskr ered mgneses ellenllsa
. s / 1 8930465 8598725 331741 R R R
mII mo m
= + = + =
Tudjuk, hogy a lgrsben a mgneses indukci B=0,6 T, innen a lgrs
fluxusa (a ffluxus fele) meghatrozhat:
. Wb 10 6 10 6 , 0 BA
2
5 4
= = =
Vgezetl a mgneses krre alkalmazzuk a mgneses Ohm-trvnyt:
. Ampermenet 6 , 1071 8930465 10 12 R
5
m
= = =
Mgneses kr induktivitsa
Tbb menet tekercs esetben az egyes menetek fluxusai sszeaddnak s
csatolt (sszelncolt) fluxust adnak:
) 11 . 5 ( BdA N
A
=
Lineris mgneses krkben (=lland) a csatolt fluxus arnyos az ram-
erssggel, amit a kvetkez egyszer levezetssel igazolhatunk.
) 12 . 5 ( I
R
N
R
NI
N
R
N N
m
2
m m
= =
= =
Az sszefggs mind mgneses krre, mind egyetlen tekercsre is igaz.
Elbbi esetben R
m
a kr ered mgneses ellenllst, utbbi esetben a te-
kercs R
m
=l
t
/
t
A
t
mgneses ellenllst jelenti. Ekkor a tekercs fluxusa a
kvetkez lesz:
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
74
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
74
) 13 . 5 ( I
l
A N
L
t
t t
2
t
=
Az ram egytthatja a tekercs lland adatait (menetszm, tekercs hossza,
keresztmetszete, magjnak permeabilitsa) tartalmazza, amit a tovbbiak-
ban a tekercs L induktivitsnak nevezzk.
Indukci jelensge mgneses krkben
Ismert jelensg, hogy ha egy l hosszsg vezett r merleges B mgne-
ses indukcij trben l-re s B-re merlegesen v sebessggel mozgatunk
(5.6. bra), akkor a mozgsi indukci rvn feszltsg indukldik a vezet
kt vgpontja kztt, melynek nagysga:
) 14 . 5 (
dt
d
dt
dA
B
dt
dx
Bl Blv U
i
= = = =
v
B
V
dx
dA
l
+
-
5.6. bra. Mozgsi indukci
Szoks az 5.14 sszefggst genertor-trvnynek is nevezni.
Mgneses krk nyugalomban lv tekercseiben is tallkozhatunk az
indukci jelensgvel. Itt a vezet (ltalban N menet tekercs) nyuga-
lomban van ugyan, de a mgneses indukci vltozik az idben. Ez a nyu-
galmi indukci jelensge (5.7. bra). Kt esetet klnbztethetnk meg:
a) klcsns indukci: a mgneses tr vltozik egy msik mgnes ternek
vltozsa miatt. Pldul a transzformtor primer tekercsre kapcsolt vl-
takoz feszltsg a vasmagban vltoz mgneses teret hoz ltre, minek
hatsra a szekunder tekercsben feszltsg indukldik. Msik fontos
alkalmazs a ksbb trgyaland differencil-transzformtor (LVDT).
b) nindukci: pldul egy tekercs ramkrbe kapcsolsakor, a tekercs
sajt mgneses ternek idbeli vltozsa miatt indukldik feszltsg.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
75
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
75
A nyugalmi indukcit N menet tekercs esetben az 5.15 egyenlet rja le:
) 15 . 5 (
dt
d
dt
dB
NA U
i
= =
) t (
U
i
) t (
I(t)
U
k
a)
b)
U
1
U
2
5.7. bra. Nyugalmi indukci a) klcsns indukci b) nindukci.
A klcsns indukci egy mrstechnikai alkalmazsa
A klcsns indukci vltozst hasznljk fel a differenciltranszform-
toros (LVDT=Linear Variable Differential Transtformer) elmozduls
mr szenzorok. Az 5.8. bra mutatja egy LVDT elvi felptst.
primer tekercs
1. szekunder
tekercs
2. szekunder
tekercs
lgymgnes
mag
f(x)
g(x)
f(x)-g(x)
x
x
y
5.8. bra. LVDT elvi felptse
A primer tekercs vivfrekvencis gerjesztse a mozg lgymgneses mag
helyzettl fggen nemlineris f(x), illetve g(x) amplitdj feszltsget
indukl a szekunder tekercsekben. Lineris jelleggrbe elrse rdekben
differencil-elrendezsben alkalmazzk a kt tekercset: a tekercsek jeleinek
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
76
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
76
f(x)-g(x) klnbsgt kpezve gyakorlatilag lineris ered jelleggrbt
nyernek. Az elrhet linearits akr 0,15% is lehet.
Az ram vltozsa a feszltsg bekapcsolsakor
Az 5.7. b) bra szerinti R ohmikus ellenlls s L induktivits tekercsre
lland U
k
kapocsfeszltsget kapcsolunk. Alkalmazzuk a Kirchoff-fle
huroktrvnyt:
) 16 . 5 (
dt
d
) t ( RI U 0 U
i
U
k j
= =
Az nindukci ltal indukldott feszltsg lineris esetben
d/dt=L(dI/dt) szerint szmthat, mivel a =LI sszefggsben
L=lland. Az ramkrben foly ram 5.16 trendezsvel az albbi diffe-
rencilegyenlet szerint alakul:
) 17 . 5 (
R
U
) t ( I
dt
) t ( dI
R
L
k
= +
Az ram, illetve az induklt feszltsg meghatrozsval ksbbi tanulm-
nyaikban tallkoznak. Most elgsges annak ismerete, hogy a kapocsfe-
szltsg bekapcsolsakor a mgneses fluxus idbeli vltozsa olyan indu-
klt feszltsget okoz, mely a kapocsfeszltsggel ellenttes rtelm, ezrt
az ram gyors nvekedst akadlyozza. A vzolt jelensg tulajdonkppen
a fizikban oly gyakori tehetetlensg elvnek egy megnyilvnulsa.
A mgneses kr energija
A mgneses krkben fellp erhatsok meghatrozshoz szksgnk
lesz a mgneses krben trolt energia ismeretre. Az elektromgnesek s
egyb reluktancia elven mkd villamos gpek mkdsnek megrtse
ignyli a kvetkez kis kitrt.
lv
i
A
5.8. bra. Zrt mgneses kr.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
77
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
77
Az egyszersg kedvrt tekintsnk egy lgrs nlkli, zrt mgneses krt.
Ttelezzk fel, hogy az elektromgnes gerjesztst a kapcsol nyitsval
megszntetjk, mikzben a glimmlmpa ramkrt zrjuk. A lmpa bizo-
nyos ideig, vltoz intenzitssal vilgtani fog, melynek energiaszksglett
a mgneses krben trolt energia fedezi. A lmpa dt id alatt felvett elemi
dE energiamennyisge a villamos teljestmnybl a
) 18 . 5 ( UIdt Pdt dE = =
ismert sszefggs szerint szmthat. Alkalmazzuk az induklt feszltsg-
re az 5.15 szerinti U
i
=d/dt kpletet:
) 19 . 5 ( NAdB I d I dt I
dt
d
dE = =
=
A tekercsben (s a lmpban) foly ramot a gerjesztsi trvnybl oly
mdon kapjuk, hogy a tekercs vezetit az l
v
hosszsg grbe mentn
krljrva az lland H trert integrljuk:
) 20 . 5 ( Hl Hds NI
v
= =
A kapott sszefggst 5.19-be helyettestve
) 21 . 5 ( VHdB AdB Hl dE
v
= =
addik, ahol V=l
v
A a vasmag trfogata. A trert a mgneses indukcival
kifejezve s az elemi energiavltozst integrlva kapjuk a mgneses trben
trolt teljes energit:
) 22 . 5 ( V
B
2
1
dB
B
V E
2
Ez az sszefggs sszetett, lgrssel rendelkez mgneses krkre is
rvnyes.
5.1.3. Erhatsok a mgneses trben
Elektromgneses (reluktancia) er
A mgnes ltal kifejtett vonzert egy egyszer elektromgnesen tanulm-
nyozzuk. A mgneses kr vasmagjnak zr tagja (anker) egy csapszeg
krl kpes elfordulni, mikzben a lgrs l
l
mrete vltozik (5.9. bra).
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
78
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
78
i
A ll
lv
F
5.9. bra. Elektromgnes behz erejnek meghatrozsa
A mgneses krben trolt energia kiszmtshoz alkalmazzuk az 5.22
sszefggst. Az energia a vasban s a lgrsben trolt energia sszege:
) 23 . 5 (
A
l
A
l
2
1
)
A
l
A
l
(
2
1
)
Al Al
( B
2
1
E
0
l
v
v
2
0
l
v
v 2
l
l
v
v 2
m
=
Az elektromgnes behz erejt a trolt potencilis energia fggvnynek
elmozduls szerinti derivlsval kapjuk (lsd potencilos ertr):
) 24 . 5 (
)
A
l
A
l
(
A
1
2
)
A
l
A
l
2
1
(
dl
d
) l ( E
dl
d
2
0
l
v
v
0
2
0
l
v
v
2
l
l m
l
= = F
Az elektromgnes ltal kifejtett er a mozg rsz (anker) helyzettl fg-
gen ersen vltozik, a lgrs nvelsvel ersen cskken (5.10. bra). A
legnagyobb ert l
l
=0 esetben kapjuk, melynek rtke
) 25 . 5 (
l 2
A I N
F
2
v 0
2
v
2 2
max
=
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
79
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
79
r
v
l
l
l
2
v 0
2
v
2 2
l 2
A I N
abs(F)
5.10. bra. Mgnes behz erejnek vltozsa a lgrs fggvnyben
Szmos esetben htrnyos a behz er nagysgnak erteljes vltozsa az
elmozduls fggvnyben. Pldul rammal, ruger ellenben vezrelt
mgnes-szelepeknl a szelep rammal arnyos elmozdulsnak elrse a
cl. Az er-elmozduls jelleggrbe az ll s mozg vasmag klnfle
geometriai kialaktsval bizonyos mrtkig az ignyek szerint mdostha-
t. Az 5.11. bra jobb oldali rsznl alkalmazott kialakts lehetv teszi,
hogy a mozg vasmag a gerjeszt rammal arnyos elmozdulst vgezzen
egy bizonyos tartomnyon bell.
F
l
l
l
l
F
i=ll.
i1
i2
i3
F
F
rug jelleggrbe
l~i
5.11. bra. Elektromgnes behz erejnek mdostsa.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
80
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
80
Plda. Hatrozzuk meg az 5.9. bra szerinti elektromgnes maximlis s
l
l
=1 mm lgrsnl kifejtett behz erejt, valamint a mgneses krben
trolt energit a kvetkez adatok esetn. A tekercs menetszma N=200
s gerjeszt rama I=0,1A, a vas relatv permeabilitsa az adott gerjeszts-
nl
r
=800, a vasmag keresztmetszete A=1 cm
2
, kzpvonalnak hossza
l
v
=6 cm,
0
=12,5610
7
Vs/Am.
A lgrs hossza a maximlis ernl zrus. Az 5.25 kpletbe helyettest-
ve a maximlis behz er:
N
l
A I N
F
v
v
47 4
06 0 10 56 12 2
10 800 10 56 12 1 0 200
2
2 7
4 2 7 2 2
2
0
2 2 2
,
, ,
) , ( ,
max
=
= =
A mgneses kr energija az 5.23 sszefggsbl l
l
=0 helyettestssel:
J
A
l
A
l
E
l
v
v
m
4
4 7
2
0
2
10 35 3
10 10 56 12 800
06 0
2
1 0 200
2
1
=
=
+
= ,
,
,
) , (
A mgnes behz ereje l
l
=1 mm tvolsgban
N ,
)
,
,
,
,
(
,
) , (
)
A
l
A
l
(
A
F(0,001)
l
v
v
022 0
10 10 56 12
001 0
10 800 10 56 12
06 0
10 10 56 12
1
2
1 0 200
1
2
2
4 7 4 7
4 7
2
2
0
0
2
=
+
=
=
+
=
A radiklis ercskkens indokolja az anker alakjnak 5.11. bra szerinti
mdostst.
Elektrodinamikus er
A msik fontos erkifejtsi elv teljesen ms alapokon nyugszik. Mgneses
ertrben v sebessggel mozg tltsre
B v q F =
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
81
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
81
nagysg Lorentz-er hat. Ha a tlts vezetben mozog, t id alatt q=it
tlts ramlik t az l=vt hosszsg vezetn. A vezetre hat er nagys-
ga s rtelme vektorszorzssal hatrozhat meg:
) 26 . 5 ( B i l F =
Szoks az 5.26 sszefggst motortrvnynek is nevezni. Az er irnyt a
jobbkz-szabllyal hatrozhatjuk meg (5.12. bra). Hvelykujjunkat a vek-
torszorzat els tnyezjnek (az ram) irnyba, mutatujjunkat a vektor-
szorzat msodik tnyezjnek (az indukcivektor) irnyba lltjuk. K-
zps ujjunk irnya mutatja a vezetre hat er irnyt.
i
B
F
5.12. bra. Vektoros szorzat rtelmezse jobbkz-szabllyal
Konkrt esetben a vezetre hat er irnya az 5.13. brn lthat.
B
F
i
l
5.17. bra. ramvezetre hat er
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
82
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
82
5.1.4. Magnetostrikci
Specilis lgymgneses anyagok kls mgneses tr hatsra deformld-
nak Ezt a jelensget magnetostrikcinak nevezik. Ezt az elvet hosszmr
rendszerekben alkalmazzk (5.18. bra). Magnetostrikcis anyagbl kszlt
cs (az n. hullmvezet) belsejben egy rzhuzal van. Ha ramimpulzust
vezetnek a huzalba, akkor a hullmvezetben krkrs mgneses tr ke-
letkezik. A hullmvezet krl a mrend tvolsgban egy gyr alak
lland mgnes tallhat, melynek ervonalai merlegesek a hullmveze-
tre. A kt mgnestr klcsnhatsbl a magnetostrikcis hats kvet-
keztben torzis hullm indul a hullmvezet mindkt vge fel. A hul-
lmvezet egyik vgre szerelt piezoelektromos talakt rzkeli a torzis
hullm megrkeztt. A hullmvezet msik vgn lv csillapt megaka-
dlyozza a msik irnyba halad hullm visszaverdst. Az ramimpulzus
kibocstsa s a torzis hullm megrkezte kztt eltelt id (fly-time)
egyenesen arnyos a mgnesgyrnek a hullmvezet vgtl mrt tvol-
sgval.
c
s
a
v
a
r
s
i
h
u
l
l
m
piezo
rezgsmro
helyzetad
mgnes
r
a
m
i
m
p
u
l
z
u
s
m
g
n
e
s
t
e
r
e
hullm haladsi
idejnek mrse
m
r
e
n
d
o
t
v
o
l
s
g
h
u
l
l
m
v
e
z
e
t
o
5.18. bra. Magnetostrikcis tvolsgmr
5.1.5. Hall-effektus
A mgneses tr egy mozg elektronra oldalirny eltrt hatst (Lorentz-
er) fejt ki. Ez az er az ram irnyra merleges feszltsgknt szlelhe-
t. A hats nagyon kicsi, mgis szmos olcs s sokoldal szenzorban
nyer alkalmazst. A hallgenertorok olyan szenzorok, melyek a Hall-hatst
hasznljk a mgneses indukci mrsre. Egy rammal tjrt flvezet-
csk (szilcium, galliumarzenid, indiumarzenid, indiumantimonid) szem-
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
83
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
83
kzti szlei kztt nem mrhet feszltsg, mivel az elektrdk azonos
potencilon vannak (ugyanahhoz a szaggatott vonallal jellt ekvipoten-
cilis fellethez csatlakoznak) (5.19. a) bra). Ha a lemez skjra merleges
mgneses indukci is hat, az ekvipotencilis felletek kiss elfordulnak, az
elektrdk most mr nem ugyanazon ekvipotencilis felletekhez csatla-
koznak, kvetkezskppen potencilklnbsg (Hall-feszltsg) mrhet
kzttk (5.19. b) bra). A hats fokozsa rdekben a flvezet hosszt a
lehetsgekhez kpest nagyra, vastagsgt kicsire kell vlasztani.
B
i i
UH UH
a) b)
d
5.19. bra. Hall-feszltsg keletkezse
A Hall-feszltsg az albbi 5.27 sszefggssel szmthat:
(5.27)
H
H
R
U iB
d
=
ahol R
H
a Hall-lland, d a flvezet szlessge, i az tfoly ram, B a
mgneses indukci. A Hall-szenzort elmozduls s szgelforduls mrs-
re hasznljk. A mrend testre egy kis lland mgnest rgztenek, ami
ltal keltett mgneses tr vltozsa mrhet.
5.1.6. Gauss-hats
Bizonyos ferromgneses anyagok megvltoztatjk az ellenllsukat kls
mgneses tr jelenltben. Ezt a Gauss-hatst hasznljk a magnetorezisz-
torok, melyeket ltalban vkonyrteg technolgival alaktanak ki. Az
egyszer magnetorezisztor ngyzetes ellenlls/mgneses indukci karak-
terisztikval rendelkezik, melyet a legtbb alkalmazshoz linearizlni kell.
Ez trtnhet egy kls mgnes vagy tekercs mgneses tervel, vagy tbb
magnetorezisztor hdkapcsolsval ugyanazon a csipen.
A magnetorezisztorok a Hall-elemeknl kisebb mgneses teret is kpe-
sek rzkelni, ezrt mgneses adattrolk olvasfejeiben, kefenlkli DC
motorok forgrsznek szghelyzet meghatrozsnl, valamint kis llan-
d mgnesekkel kiegsztve helyzetmrsnl hasznljk.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
84
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
84
5.2. A fny mechatronikai alkalmazsa
A fny mechatronikai alkalmazsa rendkvl jelents, elssorban inform-
ci nyerse, vagy tvitele szempontjbl.
5.2.1. Fnyfizikai alapfogalmak
Fnyram. Ha egy fnynyalb adott metszetn dt id alatt dW
fnyener-
gia ramlik t, akkor a fnyram
( , ) (5.28)
dW
lumen lm
dt
=
Fnyerssg. Elszr vezessk be a trszg fogalmt. Trszg alatt az R
sugar gmb egy A felletnek s a sugr ngyzetnek hnyadost rtjk:
2
(5.29)
A
R
=
A trszg mrtkegysge a szteradin (sr). Egy adott pontbl a teljes tr
=4R
2
/R
2
=4 (sr) szg alatt ltszik.
A fnyerssg a fnyforrst elhagy, az adott irnyt tartalmaz d tr-
szgben terjed d
fnyram s a d trszg hnyadosa:
( ) (5.30)
d
I cd
d
Mrtkegysge a candela.
Megvilgts. A fellet egy pontjn az oda bees d
fnyram s a fel-
letelem dA terletnek hnyadosa:
2
( / ) (5.31)
d
E lux lm m
dA
= =
Hullmhossz
A fny, mint elektromgneses hullm a sugrzsok hullmhossz szerinti
felosztsban kzpen helyezkedik el (5.20. bra).
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
85
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
85
13
10
12
10
11
10
10
10
9
10
8
10
7
10
6
10
5
10
4
10
3
10
2
10
1
10
0
10
rdi
infravrs uv
gamma
Rntgen lthat
hullmhossz [m]
5.20. bra. Elektromgneses hullmok hullmhosszai
A fny lthatsga a szem rzkenysgtl fgg, mely a 400-700nm hul-
lmhosszsg fnysugarakat rzkeli. Az brn egy szilcium fotodida
rzkenysge is lthat, mely tfogja a lthat s az infra tartomnyt is
(5.21. bra).
[nm]
300 500 700 900 1100
100
80
60
40
20
R
e
l
a
t
r
z
k
e
n
y
s
g
%
Si fotodida
szem
5.21. bra
5.2.2. Fnyforrsok
A megvilgtsra leggyakrabban alkalmazott sugrz energiaforrsok a
kvetkezk:
Izzlmpa. Lgmentes trben egy villamosan fttt fmszl van elhe-
lyezve. ltalnos megvilgtsi clokra szolgl a lthat s infravrs tar-
tomnyban, olcs, de meglehetsen rvid az lettartama. Termikus tehe-
tetlensge miatt a fny intenzitst csak lassan lehet vltoztatni, ms sza-
vakkal modulcis frekvencija kicsi.
Gzkislses lmpa (fnycs). Szabad elektronok tkznek egy csben
lv gzzal, ami fnyt okoz. A kibocstott fny spektruma frekvencia
sszettele a gz fajtjtl, nyomstl, a cs bevonattl fgg. A nagy
nyoms kislses csvek ers fnyek, szles spektrumvonalakkal. A kis
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
86
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
86
nyoms csvek fnye sok, jl elklnl vkony spektrumvonalat tartal-
maz, melyek jl elklnthetk s fggetlenl felhasznlhatk.
Vilgt dida (LED, Light Emitting Diode). J hatsfokkal, kis kltsg-
gel llt el kzeltleg monokromatikus, szk svszlessg fnyt. A fny
intenzitsa ltalban kicsi, br napjainkban mr nagy teljestmny LED-
ek is kaphatk. A klnbz szn LED-ek frekvenciaspektruma az egsz
lthat tartomnyt tfogja, st kiterjed az infra tartomnyra is. Az izz-
lmpkkal ellenttben a fnyt akr GHz-es nagysgrend frekvencival is
lehet modullni.
Lzer. Prhuzamos, egyetlen frekvencij (monokromatikus), nagy inten-
zits fnyt llt el stimullt emisszival gzban (CO
2
, Ar, He, Ne), szi-
lrd testben (rubin), flvezetben (GaAlAs). A lzer egyik fontos jellemz-
je a kibocstott teljestmny, mely a milliwatt nagysgrendtl a kilowattos
nagysgrendig terjed. A msik fontos jellemz a koherencia. A koherens
fny frekvencija s fzisszge lland, ezrt kt koherens fnysugr inter-
ferencira kpes. Az idbeli koherencia a lzer koherencia hosszval kap-
csolatos. A trbeli koherencia a fnysugr szttartsval van kapcsolatban,
mely 0,5 mrad (gzlzer) s 20 mrad (flvezet lzer) kztt van.
A megvilgts a fnyforrstl fggetlenl alapveten ktfle lehet (5.22.
bra). Htulrl trtn tvilgts esetn a trgy knnyen megklnbz-
tethet a krnyezettl, a trgy krvonala s a lyukak ismerhetk fel. Ell-
s megvilgts a felleti jellemzket teszi felismerhetv, ugyanakkor az
informci kinyerse a tkrzdsek s rnykok miatt nehezebb.
5.22. bra. A megvilgts fajti.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
87
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
87
5.2.3. A fny mrstechnikai alkalmazsai
Az optikai talaktk gyakran alkalmazott elemei a mrrendszereknek.
ltalban rintsmentes mrst tesznek lehetv, nem befolysolva ezzel a
mrend objektumot. Durva krnyezetben is alkalmazhatk, extrm h-
mrskleten vagy nagy elektronikus zajban. Nem zavarjk a krnyezetet,
nem okoznak robbansveszlyt. Alapvet mkdsi elvk, hogy a sugrz
energiaforrs ltal kibocstott fnyenergit a mrend fizikai mennyisg
valamilyen mdon megvltoztatja, amit egy detektor rzkel (5.23. bra).
Sugrz
energiaforrs
Optikai
talakt
Detektor
tviv kzeg tviv kzeg
Bemenet
5.23. bra. Optikai mrrendszer alapvet felptse
Analg intenzits modulci
Az intenzits vltozsa trtnhet folyamatosan s diszkrt ton. Valami-
lyen folyamatosan vltoz fizikai mennyisggel arnyos fnyintenzits
vltozs analg mrst tesz lehetv. Nhny plda a folytonos intenzits-
vltozs alkalmazsra a kvetkez:
Tvolsg vltoztatsa. A reflexis optokapu kt, egyms mellett elhelye-
zett ad- s vevdidbl ll (5.24. bra). Az addidbl (emitter) kibo-
cstott fny egy rsze a cltrgy felletrl visszaverdik s a vevdidba
(receiver) jut. A visszavert fnyenergia rszarnya fgg a cltrgy tvols-
gtl, felletnek szntl, nagysgtl, rdessgtl s hajlsszgtl. Ha
ez utbbi jellemzket sikerl kzel lland rtken tartani, akkor nagyon
egyszeren rzkelhet a cltrgy jelenlte (proximity szenzor), st tvol-
sga is. A 5.24. bra egy reflexis optokapura jellemz diagramot mutat,
ahol a vev dida normalizlt (maximumra vonatkoztatott) kollektor
rama lthat a tvolsg fggvnyben.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
88
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
88
100%
x [mm]
i
1 2 3 4 5 6
x
0
~lineris
szakasz
ad
vev
5.24. bra. Reflexis optokapu kollektor ram-tvolsg karakterisztikja.
Keresztmetszet vltoztatsa. Ha a fnysugr keresztmetszett vltoztat-
juk, akkor nagyon kis elmozduls mrsre nylik lehetsgnk. A vltoz
keresztmetszet nyls egy ll s egy mozg rszbl ll (5.25. bra). A
mozg rszt ltalban valamilyen deformld elemhez rgztik, mely a
mrend er, nyoms, hmrsklet stb. hatsra mrett megvltoztatja.
Az elmozduls hatsra az ll- s mozg rsz kztti keresztmetszet
megvltozik, gy a lemezekre merlegesen bees, ltalban szloptikval
odavezetett fnysugrbl tbb vagy kevesebb jut t a zr mgtt elhelye-
zett rzkelre.
mozg lemez
ll lemez
x
5.25. bra. Rekesz alkalmazsa
Ha kt fnyvezet optikai szl vgt egymshoz kpest keresztirnyban
elmozdtjuk, akkor az tvitt fny intenzitsa az elmozduls fggvnyben
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
89
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
89
szintn megvltozik (5.26. bra). Ezt az elvet alkalmazzk pldul vz alatti
mikrofonokban, ahol a hangrezgs a vev szlat keresztirnyban mozgatja,
modullva ezzel a fnysugr intenzitst.
rgztett szl
mozg szl
bemeneti intenzits
kimeneti intenzits
5.26. bra. Keresztmetszet vltoztatsa keresztirny mozgatssal
Ugyancsak az optikai szl keresztirny mozgsn alapszik a mikrohajlts
elve (5.27. bra). Ha az optikai szl grblete a terhels hatsra vltozik,
akkor megvltozik a szlon tvezetett fny intenzitsa. Er, nyoms, ny-
ls mrsre alkalmas.
Er
Fny
5.27. bra. Mikrohajlts elve
Polarizcis sk vltoztatsa. A Faraday-fle magneto-optikai hats szerint
H intenzits s l hosszsg mgneses tren thalad polarizlt fny po-
larizcis skja
) 32 . 5 ( VNI Hdl V
= =
szggel fordul el, ahol V a kzeg Verdet-llandja, N a mgneses teret
ltrehoz tekercs menetszma, I a tekercsben foly ram erssge (lsd
gerjesztsi trvny).
I
Lzer
Polariztor Polariztor
vegrd
Detektor
5.28. bra. ram mrse magneto-optikai hatssal
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
90
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
90
A Faraday-hats ramerssg mrsre trtn alkalmazsa lthat az 5.28.
brn. A lzersugr fnyt az els polariztor gy alaktja t, hogy az ere-
detileg minden irnyban rezg fny csak az bra skjban rezegjen. A fny-
sugr thalad a mgneses trben lv vegrdon, ahol a fny polarizcis
skja a trerssgtl fggen elfordul. A msodik polariztor, mely az el-
shz kpest 45 fokkal van elfordtva, a fnysugrnak csak egy rszt en-
gedi t, a sugr polarizcis szgtl fggen. A kilp fnysugr intenzi-
tsa arnyos a mgneses teret ltrehoz tekercsben foly rammal s an-
nak irnyval.
Fnysugr beessi pontjnak vltozsa. Klnleges helyet foglal el az
optikai szenzorok kztt a PSD (5.29. bra). A pozci-rzkeny detektor
(PSD, Position Sensitive Detector) olyan specilis fotdida, mely i
A
s i
B
rama csak a dida fellett r fnynyalb x helytl fgg, intenzitstl
szinte fggetlen. Ezzel kikszblhet a fnysugr intenzitsnak vltoz-
sn alapul mrsek problmja, az idben lland, hmrsklettl fgget-
len bemen fnyintenzitst biztostsa. A fnysugr pozcija az ramok
nem lineris fggvnye:
) 33 . 5 ( ,
i i
i
D x
B A
B
+
=
amit linearizl ramkrrel ignyesebb mrsi clra is alkalmass lehet
tenni. A PSD nagy elnye, hogy teljesen klnbz reflexis tulajdonsg
felletekrl visszaverd fnysugr helyzetnek rzkelsre is alkalmas.
fny
D
x
A
B
+U
A
i
B
i
p-Si
n-Si
fnyrzkeny
rteg
5.29. bra. PSD felptse
Kszl ktdimenzis kivitelben is. Olcs reflexis elv tvolsgmr
szenzorokban (tolatssegt) kerl alkalmazsra, mint lineris CCD elem
helyettestje.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
91
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
91
Digitlis intenzits-modulci
Eddig a fny intenzitsnak folytonos vltozsn alapul mrsi elveket
tekintettk t. Lehetsges azonban a fny intenzits diszkrt vltozsnak
kihasznlsa is, vagyis a van/nincs fny eldntse. A kt llapot megk-
lnbztetse digitlis mrst tesz lehetv. Legegyszerbb esetben a fny-
sugr tjba helyezett akadly teljesen elzrja annak tjt, amit a vev di-
da/tranzisztor rzkel. A kvetkezkben ismertetett eszkzk ezt a m-
kdsi elvet alkalmazzk.
Transzmisszis optokapu. Gyakran alkalmazzk vglls-kapcsolknt
PC lemezegysgekben, nyomtatkban, msolgpekben stb. A mozg
testre egy kis lemez van rgztve, mely benylik az ad- s a vevdida
(fottranzisztor) kztti rsbe s vghelyzetben megszaktja a fnysugr
tjt (5.30. bra). Az ad dida pozitv sarka az and, negatv sarka a ka-
td. A didval sorba kttt ellenllssal lehet belltani a didn tfoly
ramot, mely az adatlapbl vehet. A vev fottranzisztor a res fny
intenzitstl fggen nyitott, vagy zrt llapotban van. A kimen feszlt-
sget itt is egy sorosan kttt ellenllssal lehet belltani. Mr nhny
tized millimter lemezmozgs annyira megvltoztatja a fottranzisztor
ramt, hogy az mr egyrtelm logikai szint vltozsknt rtkelhet.
A
K
C
E
x
5.30. bra. Transzmisszis optokapu
Optikai kdtrcsa. Az optikai elven mkd szgadk szintn digitli-
san mkdnek. Kt f fajtjuk ismeretes: az inkrementlis s az abszolt.
Inkrementlis talaktk. Az inkrementlis (nvekmnyes) talaktk
csupn egy-egy impulzust adnak a forgrsz egy osztsnyi elfordulsakor.
Ha az impulzusokat a 0-helyzettl (referencia helyzet) kezdve megszmll-
juk, akkor tulajdonkppen a test abszolt szghelyzett is ismerjk. A be-
rendezs egyszer felpts, de ha valamilyen oknl fogva szmolsi hiba
kvetkezik be, akkor vgig hibs eredmnyt ad. A berendezs felptse a
5.31. brn kvethet nyomon. A forg tengelyre egy fnyt tereszt tr-
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
92
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
92
csa van rgztve, melynek pereme fnyt t nem ereszt osztsvonalakkal
van elltva. A trcstl kis tvolsgra egy teljesen hasonl, de ll maszk
van rgztve. Ha fnyt bocstunk t a trcskon s a mozg trcst lassan
forgatni kezdjk, akkor az A jel fotrzkelre jut fny intenzitsa k-
zel szinuszosan ingadozik. A jelensget otthon is kiprblhatjuk kt azo-
nos oszts fs egymson val mozgatsval. A vev dida kzel szinu-
szosan vltoz kimen jelt digitalizlni kell, ami egy kompartor ram-
krrel lehetsges. A komparlsi (sszehasonltsi) szintet belltva az
ramkr akkor ad H szint jelet, mikor a fottranzisztor jele magasabb a
komparlsi szintnl. Amint a forgrsz szggel elre vagy htra el-
fordul, egy-egy impulzust kapunk. A problma az, hogy a berendezs mg
rzketlen az elforduls irnyra. Az elforduls irnynak meghatrozs-
hoz egy msodik detektorra (B) is szksg van. A msodik detektort egy
negyed osztssal eltolt ll maszk mgtt helyezzk el. A tengelyt egy
irnyban forgatva az A s B detektor impulzusai negyed osztssal kvetik
egymst. Az impulzusok felfut s lefut leinek egyms utni sorrendj-
bl a forgs irnya most mr egyrtelmen eldnthet. Az impulzusokat
egy elre/htra szmllval megszmllva a forgrsz szghelyzete egyr-
telmen meghatrozhat.
Detektor A
ll maszk
negyed oszts eltolssal
forg kdtrcsa
Detektor B
fny
5.31. bra. Inkrementlis szgad mkdsi elve
Abszolt talaktk. Az inkrementlis talaktk szmos elnys tulaj-
donsga mellett azonban ritkn elfordulhat szmllsi hiba is. Ez akkor
kvetkezhet be, mikor az irnyvlts negyed osztson bell kvetkezik be.
Br a bonyolultabb irnyrzkel ramkrknl a hiba lehetsge nagyon
csekly, a nagy biztonsgot kvetel esetekben a hiba teljes kizrsa rde-
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
93
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
93
kben abszolt talaktt alkalmaznak. Itt nincs szksg referencia helyzet-
re, minden pillanatban rendelkezsre ll a pozci informci. Itt a kdtr-
csn annyi gyr s detektor van, ahny bit szksges az osztsszm ler-
shoz. A 6.12. brn lthat binris kdols szgad 16=2
4
oszts, ezrt
4 gyr tallhat a trcsn. A szgpozcikat jell decimlis szmok
0-15-ig terjednek. Pldul az 5-s szgpozcinak a 0*2
3
+1*2
2
+0*2
1
+1*2
0
binris kombinci felel meg.
Abszolt szgadnl elmletileg nincs tvesztsi lehetsg, azonban
egy msik problma merl fel. Nzzk azt az esetet, mikor a trcsa 1-rl
2-re vlt. Ennek sorn elmletileg egyszerre kt biten vltozik meg az
informci: a kls (2
0
) gyrn HL tmenet, az eggyel beljebb lv (2
1
)
gyrn LH tmenet trtnik. A valsgban a trcsa osztshibjnak, az
rzkel optotranzisztor pozcihibjnak kvetkeztben a kt emltett
jeltmenet nem pontosan ugyanabban az idpillanatban kvetkezik be. Ha
a kls gyr HL tmenete elbb kvetkezik be, mint a msodik gyr
LH tmenete, akkor kis ideig L,L kombinci jn ltre, ami 0 szghely-
zetnek felel meg. A szenzor kis ideig 0 pozcijelet mutat, majd termsze-
tesen a 2-es pozcinak megfelel jelet. Ellenkez sorrend tmenet ese-
tn a szenzor kis ideig a 3-as pozcinak megfelel jelet ad s utna jelenik
csak meg a 2-es pozci jel. Br tartsan mindig a helyes pozcinak meg-
felel jelet kapjuk, a rvid ideig tart hibs informci a szablyzkr m-
kdst kedveztlenl befolysolja.
1
2
3
4
5
6
7
8 9
10
11
12
13
14
15
0 1
2
3
4
5
6
7
8 9
10
11
12
13
14
15
0
5.32 bra. a) Abszolt szgad binris kdtrcsval.
b) Abszolt szgad Gray-kdtrcsval
A problma egyszeren thidalhat, ha olyan kdtrcst alkalmazunk, ahol
kt szomszdos szghelyzet kztt csak egy bit rtke vltozik (A 5.32. b)
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
94
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
94
brn pttykkel jellve). A gyakran alkalmazott Gray-kd eleget tesz en-
nek a felttelnek. Hibs szgpozci kiadsa itt nem fordulhat el. A Gray-
kd egyedli htrnya, hogy a szghelyzet binris kdd val dekdolsa
kiss bonyolultabb.
CCD detektor. sszetett geometriai objektumokrl fotoptikai kpalko-
t szenzorokkal nyerhetnk informcit. A CCD-elemek (Charge Coupled
Device, tltscsatolt berendezs), a mtrixelrendezs fmelektrdk egy
szilcium flvezetkristlyra vannak felhordva s hrmas csoportokban
vannak egymssal sszektve (5.33. bra). A flvezet htoldalra bees
fny a Si s SiO
2
hatrrtegen tltseket hoz ltre. A fmelektrdkra
adott alkalmas vezrlimpulzusokkal a tltsek egy-egy osztssal eltolha-
tk s sorosan kiolvashatk. A mtrixelrendezs, nhny ezerszer nhny
ezer pixel mret CCD-tmbket digitlis fnykpezgpekben s video-
kamerkban alkalmazzk ktdimenzis kpek felvtelre. A kpek digitlis
feldolgozsval alkatrszek alakja s mrete is ellenrizhet. A sokkal ke-
vesebb pixelt tartalmaz olcs CCD tmbket optikai egerekben alkal-
mazzk. A soros elrendezs CCD elemek szkennerekben, vonalkd olva-
skban kerlnek alkalmazsra.
n-Si
SiO2
p-Si
fny
1 2 3 1 2
eltols
kiolvasskor
kimenjel
kiolvass vezrl
3
5.33. bra. CCD szenzor
A lzeres tvolsgmr szenzorokban szintn CCD elemet alkalmaznak a
trgyrl visszavert fnysugr detektlsra. Itt mr nem a fnysugr inten-
zitsa, hanem helyzete jtssza a dnt szerepet. A trgy tvolsgnak
meghatrozst a hromszgelsi elv alkalmazsval, trigonometriai
szmtsokkal vgzik. A trgy felletnek minsge kzmbs, a mrs
linearitsa nagyon j.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
95
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
95
CCD
lzer
mrstartomny
5.34. bra. CCD elem alkalmazsa lzeres tvolsgmr szenzorban
5.3. A hang alkalmazsa
A hang kzvetlen mechatronikai alkalmazsa a 20.000 Hz feletti nagy
frekvencij ultrahangok tartomnyban jelents. A hallhat hangok 20
16.000 Hz-es frekvenciatartomnyban a nemkvnatos hang, a zaj jtszik
igen fontos szerepet a berendezsek jsgnak megtlsben. A zaj, mint
az ember-gp kapcsolat fontos eleme, a munkavdelem egyik kzponti
krdse. A tma fontossgra val tekintettel ebben a fejezetben rviden
sszefoglaljuk a hang fizikjval kapcsolatos, a mszaki gyakorlatban is
elfordul alapfogalmakat.
5.3.1. Hangfizikai alapfogalmak
A hang valamely rugalmas kzeg rezgse. Szilrd vezet kzegben test-
hangrl, folyadkban folyadkhangrl, lgnem kzegben lghangrl be-
szlnk. Ez utbbit rtjk a kznapi letben hang alatt.
Hangnyomsszint
A lghang a leveg nyomsnak vltozsa a lgkri 10
5
Pa statikus nyoms
krl. J fl emberek mr p
0
=210
5
Pa nyomsingadozst is kpesek
rzkelni.
A p
0
=210
5
Pa rtk, 1000 Hz frekvencij nyomsingadozst hallsk-
szbnek nevezzk.
A klnfle hangforrsok ltal keltett nyomsvltozsok nagyon eltrek
lehetnek ezrt a nyomsok sszehasonlthatsgnak rdekben nem
konkrt nyomsrtkeket adnak meg, hanem kt hangnyoms arnyt. Az
emltett arnyt hangnyomsszintnek nevezik s decibelben (dB) adjk meg.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
96
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
96
Definci szerint a hangnyomsszint kt hangnyoms-amplitd arny-
nak tzes alap logaritmusa, hsszal szorozva. A vonatkoztatsi nyoms
ppen a hallskszb.
) 32 . 5 ( dB
p
p
lg 20 L
0
p
=
Hangintenzits
A hang erssgnek egy msik lehetsges jellemzje a hangintenzits.
A hangintenzits az egysgnyi felleten merleges irnyban, egysgnyi id
alatt traml hangenergia. Amennyiben a P teljestmny hangforrs ide-
lis gmbsugrz azaz a hangforrs a tr minden irnyba azonos hang-
energit sugroz , valamint elg messze van a talajtl, akkor idegysg
alatt ugyanannyi energinak kell thaladni brmely r sugar A=4r
2
nagy-
sg gmbfelleten. A hangintenzits a hangforrstl r tvolsgra:
) 33 . 5 (
r 4
P
I
2
=
A hangintenzits teht a hely fggvnyben vltozik!
Hallgatlagosan olyan specilis hangteret tteleztnk fel, ahol a hang csak
a hangforrs irnybl rkezett a megfigyelhz, a terem falairl visszave-
rd hang elhanyagolhat volt. Ilyen n. szabad hangteret mestersgesen
sketszobban lehet elrni. Levezets nlkl megemltjk, hogy a hangin-
tenzits a hangnyoms amplitdval is kifejezhet
) 34 . 5 (
c 2
p
I
2
=
sszefggssel, ahol a leveg srsge s c a hang sebessge levegben.
A hangintenzitst is egy msik hangintenzitshoz viszonytva szoks meg-
adni. A viszonyts az 1000 Hz frekvencij tiszta szinuszos hang I
0
=10
-12
W/m
2
intenzitshoz, az ingerkszbhz trtnik.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
97
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
97
A hangintenzits-szint szmtsa az
) 35 . 5 (
I
I
lg 10 L
0
i
=
sszefggssel trtnik. Fontos megjegyezni, hogy L
p
s L
i
szmrtkre
megegyezik, mert az intenzits-szint szmtsnl nem 20, hanem 10 a loga-
ritmus szorzja.
Hangteljestmny
Vgl a hangtr egy harmadik fontos jellemzje a hangteljestmny-szint,
mely P teljestmny hangforrs esetben a
) 36 . 5 (
P
P
lg 10 L
0
W
=
sszefggssel hatrozhat meg, ahol a viszonytsi hangteljestmny
P
0
=10
12
W, f=1000 Hz frekvencin.
A hangtrrel kapcsolatos sszefggsek alkalmazst nhny pldn
mutatjuk be.
Plda. A hangnyomsszint a hangtr egy pontjban 90 dB. Mekkora a
hangintenzits?
Mivel a hangnyomsszint s a hangintenzits-szint szmrtkre meg-
egyezik, ezrt a hangintenzits-szint sszefggst alkalmazhatjuk:
2 3
10
90
12
10
0
0
10 10 10 10 10 m / W I I
I
I
lg L L
I
L
I p
= = = = =
Plda. Hrom gp hangnyomsszintjt egy rgztett pontban egyms utn
megmrjk. Az egyes gpek hangnyomsszintjei a kvetkezk: L
p1
=77 dB,
L
p2
=80 dB, L
p3
= 82 dB. Mekkora a hangnyomsszint az elbbi pontban,
ha a hrom gpet egyszerre mkdtetjk?
A hangintenzitsok irnytl fggetlenl sszegezhetk. Felhasznlva
az elz plda sszefggst az
) ( I I I I I
p p p
L L L
10 10 10
0 3 2 1
3 2 1
10 10 10 + + = + + =
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
98
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
98
addik, ahonnan a hangnyomsszint mely a hangintenzits-szinttel egye-
zik meg a kvetkez:
dB , ) lg(
I
I
lg L L
i p
9 84 10 10 10 10 10
10
82
10
80
10
77
0
= + + = = =
rdemes megfigyelni, hogy az egyes gpek hangnyomsszintjei nem algeb-
railag addnak ssze!
Plda. Egy P
1
=4W s P
2
=10W teljestmnnyel sugrz hangforrs a fld-
hz kzel van elhelyezve. A megfigyel r
1
=10, illetve r
2
=20 m tvolsgra
van a hangforrsoktl. Mekkora hangnyomsszintet hall az A pontban
lv megfigyel? Mekkora a hangnyoms vltozs amplitdja?
P1 P2
r1 r2
A
5.35. bra. Hangsugrzk elhelyezse.
Mivel a hangsugrzk a fldhz kzel helyezkednek el, ezrt a hangener-
gia csak egy flgmbfelleten tud eltvozni, feltve, hogy a talaj nem nyel
el energit. A hangintenzitsok az A pontban rendre
2
2 2
2
2
2
2
2 2
1
1
1
004 0
20 2
10
2
0064 0
10 2
4
2
m / W ,
r
P
I
s m / W ,
r
P
I
=
= =
=
= =
A hangintenzitsok sszegzsvel az ered hangintenzits-szint a kvetke-
z lesz:
dB
) , , (
lg
I
) I I (
lg L L
I p
100
10
004 0 0064 0
10 10
12
0
2 1
=
+
=
+
= =
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
99
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
99
A hangnyoms amplitdjt a 5.34 sszefggs trendezsvel kapjuk:
Pa cI p 91 2 0104 0 330 23 1 2 2 , , , = = =
Ez az rtk a lgkri nyoms mindssze 0,0003 szzalka, mg egy ilyen
ers hang esetben is!
Plda. Egy szivattyt hangteljestmnyt megmrjk oktvsvonknt. (Az
oktv 2:1 frekvenciaviszonyt jell). A mrt eredmnyek a kvetkezk:
A tbbi frekvenciasvban sugrzott hangteljestmny elhanyagolhat! Ha-
trozzuk meg az A slyozs hangnyomsszintet a szivattytl r=5
mterre, flgmbsugrz s szabad tr felttelezsvel!
Az ered hangteljestmny mrse helyett pontosabb vizsglatoknl
frekvenciasvonknt (terc vagy oktvsvonknt) hatrozzk meg a hangtr
jellemzit. Mivel az emberi fl eltren reagl a klnbz frekvencij
hangokra, a svonknt mrt objektv rtkek (az ingerek) slyozssal lehe-
tsg van az ember ltal rzkelt hats (rzetek) kiszmtsra.
Elszr az egyes frekvenciasvokban a mrt hangteljestmnyszintek-
bl intenzits-szinteket szmolunk.
2
10
0
2
10
0
10
0
0
2
10
10 10
2
10
10 10
r
lg
I
I
lg L
r
P
A
P
I P P
P
P
lg L
P
P
P
L
I
L
L
W
= =
= = = =
A rszletszmtsok mellzsvel az intenzits szintek az egyes frekvencia-
svokban a kvetkezk: L
I500
=50 dB, L
I1000
=52 dB, L
I2000
=44 dB,
L
I4000
=36 dB.
Az egyes frekvenciasvok objektv hangintenzits-szint rtkeit a szab-
vny szerinti slyoz tnyezk hozzadsval korrigljuk, amit a kvetke-
z tblzatban lthatunk.
Oktv svkzp frekvencia, (Hz)
500 1000 2000 4000
Oktv hangteljestmnyszint, L
W
, (dB)
72 74 66 58
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
100
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
100
A tblzat als sornak adataibl az ered A slyozs hangintenzits-
szint a kvetkez lesz:
dB 54 ) 10 10 10 10 lg( 10 L
7 , 3 52 , 4 2 , 5 68 , 4
A I
= + + + =
5.3.2. Az ultrahang
Ultrahangnak nevezzk az emberi fl szmra mr nem rzkelhet, 20
kHz-nl magasabb frekvencij hangot. A hang c sebessge, f frekvencija
s hullmhossza kztti ismert sszefggsbl a hullmhosszt kifejezve
(5.37)
c
f
=
addik. Kzvett anyagknt levegt felttelezve, c=330 m/s hangsebes-
sggel s a minimlis f=20 kHz frekvencival 0,0165 m hullmhossz ad-
dik, ami mr alkalmas durva mrsi feladatokra. A frekvencia nvelsvel
a hullmhossz tovbb cskkenthet s 200 kHz esetn millimteres fel-
bonts is elrhet. A frekvencia korltlan nvelsnek a hordoz kzeg
nvekv csillaptsa szab korltot.
Az ultrahang jellemz tulajdonsga, hogy szk nyalbban sugrozhat
ki, ami energiatakarkossgi s mrstechnikai szempontokbl is elnys.
Oktv svkzp frekvencia (Hz) 500 1000 2000 4000
Hangintenzits-szint, L
I
, (dB) 50 52 44 36
A slyoz tnyez szabvnybl (dB) 3,2 0 1,2 1
A slyozott hangintenzits-szint (dB) 46,8 52 45,2 37
30
30
0dB
-10dB
-20dB
-30dB
-40dB
0
D
5.36. bra. Ultrahangsugrz irnyhatsa.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
101
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
101
A kisugrzott energia intenzitsa a sugrzhoz kzel (n. kzeltr vagy
Fresnel-zna) ersen oszcilll s bizonyos diszkrt irnyokban koncentr-
ldik (7.2. bra).
A kzeltr r
0
hatra egy D tmrj sugrz esetben r
0
=D
2
/4 ssze-
fggssel szmthat. A sugrztl tvol (r>>r
0
) lv Fraunhofer-znban a
hang egy =arcsin(0,5/D) flnylsszg kpban terjed. A hang intenzi-
tsa a sugrztl mrve cskken, mivel a kp egyes keresztmetszeteinek s
az ott mrhet intenzitsnak a szorzata, vagyis az traml hangteljest-
mny lland: I
1
(r
1
tg)
2
=I
2
(r
2
tg)
2
. (5.37. bra)
D
r
1
r
2
I 1
I
1
I
2
r
0
5.37. bra
Az ultrahangot hasznl mrsi elvek az ultrahang-impulzusok futsi ide-
jnek (fly-time) meghatrozsn alapulnak. Rezgskeltknt piezokristlyt
(pl. briumtitant) vagy piezoelektromos polimert alkalmaznak, mely nagy-
frekvencis gerjeszts hatsra ultrahang-impulzuscsomagot bocst ki
(5.38. bra). A hang a cltrgyrl visszaverdik. A hangimpulzusok megr-
keztt a vev rzkeli. A piezoelektromos hats megfordthatsga kvet-
keztben az ad s a vev ugyanaz az talakt is lehet. Az impulzussoro-
zat kibocstsa s visszarkezse kztt eltelt id egyenesen arnyos a
cltrgy tvolsgval s termszetesen fgg a hang terjedsi sebessgtl is
az adott kzegben. Az ultrahangos tvolsgmrsi elvet nem csak leveg-
ben, hanem folyadkokban s szilrd testekben is alkalmazzk. Elbbinl
tartlyban lv folyadk szintmagassgnak mrsre, tengeralattjrnl
objektumok feldertsre, szilrd testekben pedig anyaghibk roncsols-
mentes feldertsre.
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
102
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
102
cltrgy
ad/vevo
visszhang
x
5.38. bra. Ultrahangos tvolsgmrs elve
5.4. Egyb fizikai hatsok
A pezoelektromos s piezorezisztv hats a mechanikailag merev krist-
lyok mr egszen kis deformcijnl is jelentkezik, ezrt nagy merevsg,
magas frekvencin is mkdkpes szenzorok s aktutorok ptst teszi
lehetv.
5.4.1. Piezoelektromos hats
Bizonyos termszetes kristlyok, mint a kvarc (SiO
2
), valamint specilis
kermik, pl. Briumtitant (BaTiO
3
), valamint az lommetaniobt
(PbNb
2
O
6
) piezoelektromos hatst mutatnak, ami abban nyilvnul meg,
hogy kls mechanikus terhels hatsra a megfelel mdon kimetszett
kristly ellenttes felletein villamos tltsek jelennek meg. Az elektrdk
kztt feszltsgklnbsg mrhet. A piezoelektromos hats kialakulst
a 8.1. bra szemllteti egy elemi kvarccelln. Terhels hatsra a cella de-
formldik, miltal a pozitv s negatv tltsek slypontja eltoldik. En-
nek kvetkeztben az elemi cellbl elektromos diplus alakul ki.
F
F
- - - - - -
+ + + + + +
Si
O
Si
O
+
+ +
+
+
+
-
-
-
-
-
-
a) b)
5.39. bra. a)Terheletlen piezokristly, b) terhelt piezokristly
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
103
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
103
A szomszdos cellk hasonl irnyban orientldnak, vgl a kristly sz-
ln tltsek jelennek meg. Ltezik transzverzlis s longitudinlis
piezolektromos hats is. Mindkett aktv szenzor ptst teszi lehetv,
mert nem ignyel kls energiaforrst. Mivel a piezoelektromos talakt,
mint genertor bels ellenllsa igen nagy, ezrt a tltsek mrsre nagy
bemeneti ellenlls berendezs, az n. tltserst szolgl. A tltsers-
t esetenknt kltsgesebb, mint maga a szenzor. Megjegyzend tovbb,
hogy a tltsek a leggondosabb feldolgozs mellett is nagyon rvid id
alatt kompenzldnak, ezrt a piezoelektromos hats statikus ermrsre
nem alkalmas.
A pioezoelektromos hats meg is fordthat: ha a kristly szemkzti
felletei kz feszltsget kapcsolunk, akkor a kristly a mrett megvl-
toztatja. Ezrt nagy frekvencij, pontos elmozdulsok ltrehozsra kiv-
lan alkalmas, amit pldul nyomtatk festkpatronjnak mkdtetsre,
vagy optikai rendszerek finompozcionlsra hasznlnak. Az elmondottak
alapjn a piezokristly szenzorknt s aktutorknt egyarnt alkalmazhat.
Egy elemben val ketts alkalmazsra j plda az ultrahangos vizsglfej,
melyet anyagok roncsolsmentes vizsglatnl alkalmaznak.
A piezokristly, mint tmeggel s rugalmassggal rendelkez test, me-
chanikai rezgsekre kpes. Az egyenslybl kitrtett kristly a sajtrezg-
seit vgzi, ami periodikusan vltoz feszltsget okoz a szemkzti lapok
kztt. A feszltsg vltozsa nagyon szablyos, mert a mechanikai leng-
rendszer sajtfrekvencijt nem befolysolja a hmrsklet vltozsa. Ha a
kristly rezgst fenntartjuk azltal, hogy a vesztesgeket megfelel ram-
krrel ptoljuk, akkor nagyon stabil oszcilltort kapunk. Ilyen rezg-
kvarc-oszcilltort alkalmaznak kvarcrban is, melynek pontossga akr
vi 5 msodperces hibn bell is tarthat.
A piezoelektromos kristlyok elektro-optikai hatst is mutatnak, ami
abban nyilvnul meg, hogy a feszltsg hatsra optikai tulajdonsgaik is
megvltoznak. Ezt a tulajdonsgot hasznljk kommunikcis rendsze-
rekben a lzersugr modulcijra.
5.4.2. Piezorezisztv hats
Bizonyos flvezetkristlyok, mint pl. a szilcium, fajlagos ellenllsa meg-
vltozik hz, vagy nyom terhels hatsra. A piezorezisztv hats pol-
ros tengelyek nlkli anyagokban is fellp, fmekben azonban elhanyagol-
hat. A fajlagos ellenlls vltozsa arnyos a mechanikai feszltsggel,
A mechatronika alapjai Szenzorok s aktutorok fizikai alapjai
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
104
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
104
valamint a p piezorezisztv tnyezvel, mely fknt a kristly orientcij-
tl fgg:
(5.39) p
A piezorezisztv anyagot ltalban a deformld mrtestre viszik fel, s
hdkapcsolsban mrik az ellenlls vltozst. A piezorezisztv hats - ellen-
ttben a piezoelektromos hatssal - felhasznlhat statikus mrsekre is.
5.4.3. Seebeck- s Peltier-hats
Ha kt klnbz fmet vagy flvezett sszeerstnk s az sszeers-
tsi pontot melegtjk vagy htjk a szabad vgekhez kpest (5.40. bra),
akkor a szabad vgek kztt feszltsgklnbsg lp fel, mely az
s
U1,2
T1
T2
5.40. bra. Seebeck-hats
Seebeck-llandval s a T=T
1
-T
2
hmrskletklnbsggel arnyos:
1,2
(5.39)
S
U T =
A Seebeck-hatst hasznl szilikon termoelemeket az elektromos ram h-
hatsnak alapjn ram effektv rtknek (RMS, RootMeanSquer) mrs-
re, folyadkok ramlsnak mrsre s hsugrzs mrsre hasznljk.
Az Seebeck-hats megfordtsa a Peltier-hats. Ekkor a flvezetk sza-
bad vgei kz kapcsolt megfelel polarits feszltsg-klnbsg hats-
ra az sszeerstsi pont lehl. Nagy rtk elektronikai elemek hthetk
vele mozg alkatrsz s zaj nlkl.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
105
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
105
6. Szenzorok
A mechatronikai rendszerekben a rendszer llapott ler mennyisgek
ismerete alapvet feladat.
Azokat az elemek, melyek ltalban nemvillamos fizikai mennyisgeket
villamos kimenjelekk alaktanak t, szenzoroknak nevezzk.
A konkrt mrsi feladatra alkalmas szenzor kivlasztshoz a kvetkez
szempontokat kell mrlegelni:
milyen fizikai jellemzt,
milyen mrstartomnyban,
milyen pontossggal kell mrni?
6.1. A szenzorok irnt tmasztott kvetelmnyek
A mrstartomnyon bell egyrtelmen s reproduklhatan kpezze
le a bemen jelet kimen jell
A kimenjel csak a bemenjeltl fggjn. Ezt a kvetelmnyt nehz
megvalstani, mert a legtbb fizikai mennyisg a hmrsklettl is
fgg.
Lineris kapcsolat legyen a bemenet s a kimenet kztt
A mrrendszer ne hasson vissza a mrt rendszerre (pl. feszltsgm-
rsnl a mszer bels ellenllsa a lehet legnagyobb legyen, hogy ne
szvjon el ramot a mrt rendszertl
rzketlensg kls zavarokkal (elektromgneses tr, vibrci, vegyi
hatsok stb.) szemben.
A kimenjelet normlni lehessen. A jelenleg hasznlatos rtkek
Analg kimenjelre: 05V
010V
55V
1010V
020mA
420mA
Digitlis kimenetre: prhuzamos port (8 bit, Centronics Interface)
soros port (RS 232, RS 485)
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
106
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
106
Buszrendszer: Interbus-S
Profibus
CAN-bus
Egyszer ramellts
Mkdkpessg ellenrizhetsge (pl. vilgt Light Emmitting Diode,
LED a szenzoron)
6.2. A szenzorok ltalnos felptse
A jelek feldolgozsnak foka szerint a kvetkez fokozatokat klnbz-
tetjk meg: egyszer szenzor, integrlt szenzor, intelligens szenzor (6.1.
bra).
nem villamos
kzbls mennyisg
primer
villamos
mennyisg
analg
kimenjel
A/D
digitalizlt jel
kirtkel
elektronika
vlt
mikroszmtgp
Egyszer szenzor
Integrlt szenzor
Intelligens (SMART) szenzor
Kimenet
(digitlis/analg)
talakt
1 2 3 4 5
6.1. bra. Szenzorok felptse
A jel terjedst a szenzoron bell egy ermr szenzor pldjn mutat-
juk be.
1. A mrend mennyisget, amennyiben azt semmilyen ismert fizikai elv
szerint sem lehet kzvetlenl villamos jell talaktani, elszr egy
kzbls mennyisgg kell talaktani (kzvetett mrs). Ermrs-
nl ez a kzbls mennyisg valamely rugalmas elem deformcija. Ha
ez a lps kimarad, akkor a kzvetlen mrs lehetsge ll fenn, pl-
dul a piezoelektromos hats sorn nyomerbl kzvetlenl villamos
tlts keletkezik.
2. A kzbls mennyisget (deformcit) elsdleges villamos mennyisg-
g kell talaktani, melynek sorn klnfle fizikai hatsok jhetnek
szba. Pldul a nylsmr blyeg, mely deformci hatsra az el-
lenllst vltoztatja. Az elsdleges villamos mennyisg itt az ellenlls.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
107
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
107
3. Az elsdleges villamos jel feldolgozsra egy kirtkel elektronika
szolgl, mely a jel erstsn kvl a kvetkez feladatokat ltja el:
nullponteltrsek kompenzlsa
zavarjelek szrse
jel linearizlsa
mrshatr illeszts
kimenjel normlsa (pl.010V)
Az ermr pldjnl maradva, egy erst egysg rtkeli ki a ny-
lsmr blyegen es feszltsget.
4. Mivel a jel a tovbbiakban digitlisan lesz feldolgozva, ezrt az analg
kimen jelet digitlis jell kell talaktani. Erre a feladatra szolgl egy
A/D talakt.
5. A mikroelektronikai alkatrszek fejldse lehetv tette, hogy a digit-
lis kirtkel egysget (mikrokontrollert) a szenzor hzba integrljk.
Ezltal a 3. pontban bemutatott funkcik sokkal egyszerbben valst-
hatk meg, ezenkvl teljesen j lehetsgek nylnak a jel tovbbi fel-
dolgozsra, gymint:
a mrsi adatok felgyelete s trolsa a szenzorban
a riaszts nll kivltsa a hatrllapot elrsekor
buszrendszerrel val kommunikci lehetsge
szrmaztatott mennyisgek szmtsa (pl. egy elmozduls mr
szenzor jelnek differencilsval sebessgjel is rendelkezsre ll)
tbb talakt egy szenzorba val integrlsa, a mrt jelek kzs
feldolgozsa (pl. tbbkomponens gyorsulsmr)
kls szmtgp segtsgvel lehetsg van a szenzor jrakonfigu-
rlsra (pl. szksg esetn a szenzor tviteli fggvnye megvltoz-
tathat)
6.3. A kzvetett mrs elve
A kzvetett mrs elvt a nylsmr blyeges ermrsen mutatjuk be.
Alkatrszek alakvltozsnak mrsre elterjedten alkalmazzk a tenzo-
metrikus mrsi elvet. Az elv lnyege, hogy egy vezet hossznak megvl-
tozsa nylsa vagy rvidlse a vezet ellenllsnak vltozst okoz-
za. A gyakorlatban egy nhny millimter nagysg n. nylsmr blye-
get (Strain gauge, DehnungsMessStreifen) ragasztanak a mrend trgy.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
108
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
108
l1
F
1
6.2. bra. Nylsmr blyeg a testre ragasztva.
Felletre. Specilis ragasztval elrhet, hogy a nylsmr blyeg egytt
nyljon a trggyal, ha az a terhels hatsra deformldik. A nylsmr
blyegben vkony vezet szl van kgy-alakban elhelyezve, mely a nyls
hatsra megvltoztatja ellenllst. Az ellenlls vltozsnak meghatro-
zshoz tekintsk ismertnek az l=nl
1
hosszsg, A fellet (r sugar kr
keresztmetszet), fajlagos ellenlls vezet ellenllsnak (6.1) ssze-
fggst. A vezet
) 1 . 6 (
r
l
A
l
R
2
= =
ellenllsa megvltozik, ha a hrom paramter kzl brmelyik megvlto-
zik. Mint matematikai tanulmnyainkbl tudjuk, az R(, l, r) tbbvltozs
fggvny dR megvltozsrt felels sszetevk slynak meghatrozsa
parcilis derivlssal lehetsges:
) 2 . 6 ( dr
r
R
dl
l
R
d
R
dR
A parcilis derivlsokat elvgezve a kvetkez sszefggst nyerjk:
) 3 . 6 ( dr
r
l
2 dl
r
d
r
l
dR
3 2 2
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
109
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
109
Az egytthatkat trva
) 4 . 6 ( dr
r
R
2 dl
l
R
d
R
dR +
sszefggs addik, melynek mindkt oldalt R-rel osztva
) 5 . 6 (
r
dr
2
l
dl d
R
dR
+
kvetkezik. (Ezt az eredmnyt logaritmikus differencilssal is megkaphat-
tuk volna). Ha szrevesszk, hogy =dl/l a huzal hosszirny fajlagos ny-
lsa, valamint
k
=dr/r a huzal keresztirny fajlagos nylsa, akkor kzt-
tk kapcsolat rhat fel a Poisson-tnyez segtsgvel:
) 6 . 6 (
l
dl
r
dr
=
A helyettestst elvgezve a
(1 2 ) (6.7)
dR d dl
R l
+ +
kapcsolatot nyerjk, melyben a fajlagos ellenlls vltozsa fmvezet
esetn elhanyagolhat. trendezssel kapjuk a nylsmr blyeg erst-
st (Gauge-faktor), mely azt mutatja meg, hogy egysgnyi fajlagos nyls
mekkora fajlagos ellenlls vltozst okoz:
) 8 . 6 ( 2 2 1
l / dl
R / dR
g + =
Itt =0,5 ha a vezet szl trfogatt llandnak vesszk. A g=2 rtk azt
jelenti, hogy 1% hosszvltozs 2% ellenlls-vltozst okoz. Ha a fm al-
katrszekben bred maximlis feszltsget =200 N/mm
2
-nek ttelezzk
fel s E=210
5
N/mm
2
rugalmassgi modulussal szmolunk, a maximlis
fajlagos nylsra a szilrdsgtan alapjt kpez Hooke-trvny (=E) r-
telmben
max
=0,001 rtk addik. A fajlagos ellenlls-vltozs g=2 rtket
alapul vve dR/R=0,002. Mivel a nylsmr blyegek szoksos ellenllsa
R=120, ezrt csak legfeljebb dR=gR=2*0,001*120=0,24 ellenlls-
vltozsra szmthatunk mg maximlis terhels esetn is.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
110
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
110
Ilyen kis ellenlls-vltozst klnbsgi mdszerrel, n. Wheatstone-
hddal tehetnk mrhetv, amennyiben az ellenlls-vltozst feszltsg-
vltozss alaktjuk t. Ez a konverzi amgy is elnys, hiszen a villamos
jelek hordozi tbbnyire feszltsg- vagy ramrtkek.
A Wheatstone-hd szoksos elrendezst a 6.3. brn lthatjuk. A legegy-
szerbb esetben a ngy ellenlls kzl hrom lland rtk, a negyedik
pedig a terhels hatsra ellenllst vltoztat nylsmr blyeg. A ny-
lsmr blyeg hmrsklete mrs kzben vltozhat, ami kihatssal van
annak ellenllsra. Ezrt szoksos a nylsmr blyeggel sorba kttt
ellenllst egy terheletlen, azonos hmrsklet nylsmr blyeggel (n.
kompenzl blyeggel) helyettesteni, melynek ellenllsa csak a hmrsk-
letvltozs hatsra vltozik.
UT
R
R R
Rx=R+geR
U1 U2
6.3. bra. Wheatstone-hd (negyed hd).
A hidat U
T
feszltsggel tpllva kt feszltsgoszt kimen feszltsg-
nek U
1
U
2
klnbsgt mrjk. U
1
s U
2
rtkt a terheletlen feszltsgoszt
sszefggsbl hatrozhatjuk meg:
) 9 . 6 ( U
R R
R
U U
R R
R
U
T
x
2 T 1
+
=
+
=
A feszltsgklnbsg innen, ha R
x
=R(1+g)
) 10 . 6 (
) Rg R 2 ( 2
Rg
U
) R R ( R 2
R 2 R ) R R ( R
U U U
T
x
x
T 2 1
+
=
+
+
=
Amennyiben R=120 s g=2 rtkeket vesznk alapul, a mrhet feszlt-
sgklnbsg
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
111
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
111
) 11 . 6 (
2
U U U
T 2 1
+
=
lesz. A fggvny jellegre helyes menete a 6.4. brn lthat. Amennyiben a
nevezben
max
=0,001 rtkt a 2 mellett elhanyagoljuk, gy lineris ssze-
fggst kapunk a mrt fajlagos nyls s a U feszltsgklnbsg kztt
(brn vkony vonallal brzolva). A maximlis hiba a legnagyobb fajlagos
nyls esetben a kvetkez:
% , azaz ,
U
U U
h
max , lin
max , lin max
max
05 0 0005 0
2
2 2
=
+
=
rdemes megfigyelni, hogy a U feszltsg kpletben a fajlagos nylson
s a gauge-faktoron kvl a hidat tpll feszltsg rtke is szerepel. An-
nak rdekben, hogy a tpfeszltsg ingadozsa ne okozzon hibt, a tpfe-
szltsget stabilizlni kell.
U
max
Ulin,max
Umax
O
6.4. bra. A fajlagos nyls s a kimen feszltsg kapcsolata
A Wheatstone-hd U feszltsge mV nagysgrend, ezrt az erstsre
szorul. Az ersts clszeren egy egyenram n. mszererstvel tr-
tnhet (6.5. bra). Az erstnek fldfggetlennek s nagy bemeneti ellen-
llsnak kell lenni, hogy a hdgak valban terheletlen feszltsgoszt-
knt mkdjenek.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
112
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
112
+
+
-
-
-
+
R1
R2
R2
R3
R3
R4
R4
U
Uki
6.4. bra. Mszererst kapcsols
A hdgak egy-egy mveleti erst neminvertl bemenetre vannak kt-
ve, melyek bemeneti ellenllsa a FET-es bemeneti fokozat rvn 10
11
-10
12
nagysgrendben van. A ktfokozat erst erstse:
) 12 . 6 ( . 1
R
R
2
R
R
U
U
1
2
3
4 ki
+ =
A nylsmr blyeggel tulajdonkppen egy alkatrsz adott pontjnak kis
krnyezetben lv fajlagos nylst mrjk. Sok esetben azonban nem a
fajlagos nyls, hanem a test felsznn bred feszltsg s az abbl sz-
mthat terhels meghatrozsa a clunk. Ha a feszltsgi llapot egyten-
gely s a nylsmr blyeg az ismert feszltsgi ftengely irnyban van
felragasztva, akkor a feszltsg az egyszer Hooke-trvny (=E) alapjn
szmthat. Ilyen ismert feszltsgi llapotot valstanak meg er- s
nyomsmr szenzorok tiszta nyomsra, vagy tiszta hajltsra ignybevett
mrtestben, ami a mrst s a kirtkelst egyszerv teszi.
Lehetsg van egybknt sszetett ignybevtel esetn is az egyes fe-
szltsg-sszetevk (
hz
,
hajl
) klnvlasztsra, ha a test klnbz
pontjaiba ragasztott nylsmr blyegeket a Wheatstone-hd megfelel
gba ktjk (flhd, teljes hd).
Ismeretlen feszltsgi llapot esetben tbb, klnbz irnytottsg
nylsmr blyeget tartalmaz n. rozettt ragasztanak a test krdses
pontjba, termszetesen a mrs kirtkelse lnyegesen bonyolultabb.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
113
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
113
6.5. bra. Rozetta
Ignyesebb mrseknl az alacsonyfrekvencis zavarok kikszblse
rdekben a hidat nem egyenfeszltsggel, hanem kb. 5kHz vivfrekven-
cis feszltsggel tplljk. A jel demodulcijval (fzisrzkeny egyen-
irnytsval) itt nem foglalkozunk.
6.4. Szenzorok jellemzi
A kvetkez rszben a szenzorok fontosabb jellemzit, s azok mrsre
gyakorolt hatst trgyaljuk.
6.4.1. Mrstartomny
A szenzor ltal mrt fizikai mennyisg tartomnya, melyre a kimeneti rt-
ket adott pontossggal kell lekpezni.
Konkrt esetben a mrstartomnyt clszer kisebbre vlasztani a szenzor
mrstartomnynl, hogy megvjuk azt a tlterhelstl (6.6. bra).
szenzor mrstartomnya
mrstartomny
bemenjel
kimenjel
6.6. bra. Mrstartomny
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
114
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
114
6.4.2. rzkenysg
A kimenjel bemenjel szerinti derivltja:
) 13 . 6 (
dx
dx
S
b
k
=
Lineris eszkznl a kimenjel s bemenjel kztti kapcsolatot ler
egyenes meredeksge. Az S jells a Sensitivity=rzkenysg szbl szr-
mazik.
Plda. Egy gyorsulsad mrstartomnya (a legnagyobb mrhet gyorsu-
ls rtke) 100g (1009,81 m/s
2
). A kimenjel maximlis rtke 5V. Hat-
rozzuk meg a gyorsulsad rzkenysgt!
Lineris eszkzt felttelezve a kimenjel bemenjel szerinti derivltj-
nak rtke (a feszltsg-gyorsuls jelleggrbe meredeksge) minden pont-
ban lland:
) s / m /( V 005 , 0
0 9810
0 5
a
U
da
dU
S
2
=
= =
U
a
5 V
9810 m/s
2
0
6.4.3. Felbonts
Arrl ad felvilgostst, hogy a bemenjel kt egyms melletti rtke mi-
lyen kzel lehet egymshoz, hogy a kimeneten kt megklnbztethet
rtkknt jelenjen meg.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
115
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
115
Lnyegben a mrend mennyisg azon vltozst jelenti, ami a mrbe-
rendezssel minimlisan megmrhet.
Nha az adatlapokon az olvashat, hogy a felbonts gyakorlatilag vgte-
len, ami arra utal, hogy erstssel a legkisebb jel is korltlanul ersthet.
Tudni kell azonban, hogy az analg jel mindig tartalmaz zajkomponenst is,
ami a konkrt elektromos beptsi felttelektl is fgg. A zajmrst ezrt
lehetleg a szenzor beptett llapotban kell elvgezni.
Plda. Egy digitlis fnykpezgp a 30 mm hossz mrend trgy kpt
egy CCD rzkelre kpezi le, mely soronknt 2000 pixelt (fnyrzkel
elemet) tartalmaz. A kp az rzkel teljes mrett kitlti. Hatrozzuk meg
a felbontst!
A felbonts, vagyis jelen esetben a legkisebb rzkelhet mretvltozs
rtke arnyprral kaphat meg, ha figyelembe vesszk, hogy a lekpezett
kp rzkelhet vltozsa 1 pixel.
mm 015 , 0 x
1
x
2000
30
= =
Plda. Egy hosszmrsre alkalmas tolmrce a mrsi rtkek pontosabb
leolvashatsga rdekben n. Nniusz-mrcvel van elltva. Az ll mr-
cersz 9 mm hossz szakasza a mozg mrcerszen 10 rszre van feloszt-
va. Az ll s a mozg mrcerszek osztsainak klnbsge teht 0,1 mm.
A millimter trtrsznek leolvassa gy trtnik, hogy megkeressk az
egymssal fedsben lv osztsvonalakat. Ahnyadik osztsvonalak tall-
koznak, annyiszor 0,1 mm a mozg mrce elmozdulsa.
9 , 0 10
1 9 1 4
9 , 0 4 0,4
osztsok
fedsben
osztsok
fedsben
mozg mrce
ll mrce
elmozduls
A mreszkz felbontsa ezek szerint 0,1 mm, mert ekkora a legkisebb
megklnbztethet (leolvashat) mretvltozs.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
116
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
116
6.4.4. Mrsi pontossg
Klnbsget kell tenni egy mrsi eljrs pontossga s magnak a szen-
zornak a mrsi pontossga kztt. ltalnos szably, hogy a mreszkz,
illetve a mrsi eljrs pontossga egy nagysgrenddel legyen nagyobb,
mint a mrend mennyisg megkvnt mrsi pontossga.
A hiba egy lehetsges osztlyozsi szempont szerint lehet abszolt s re-
latv, ms szempont szerint determinisztikus (rendszeres) s sztochasztikus
(vletlenszer).
Az abszolt hiba egy aktulis mrt rtk eltrse a bemenjel alapjn
vrt idelis mrt rtktl. Az abszolt hiba a mrend mennyisggel
azonos mrtkegysg. A relatv hiba ltalban a mrstartomny szzal-
kban van megadva.
A determinisztikus hibk nagysga s eljele ismert, elre megadhat,
mivel azok magbl a mrsi elvbl kvetkeznek.
Pldaknt szolgl egy szinusz- mechanizmussal mkd tapintfejes mrm-
szer. A tapint fggleges x elmozdulsnak hatsra az R sugar kar (s a
hozz rgztett mutat) ) R / x arcsin( = szggel fordul el. A kapcsolat az
elmozduls s a mutat elfordulsa kztt nemlineris. Lineris kapcsolatot
a sokkal kltsgesebb fogaslc-fogasv tttel alkalmazsakor kapnnk (bal
oldali bra), mivel itt . R / x = A szinusz-mechanizmus rendszeres, de-
terminisztikus hibja az arssin fggvny sorfejtsnek felhasznlsval
3
)
R
x
(
6
1
R / x ) R / x arcsin( = .
x
R
x x
x
R
6.7. bra
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
117
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
117
A sztochasztikus hibk nagysga s eljele elre nem tudhat, mert vletlen-
szeren lpnek fel. Pldul egy tolmrce mrsi pontossga fgg az al-
kalmazott mrertl. Ez a mrst vgz szemlytl ersen fgg. (6.8.
bra)
F
1
1 2
F F >>
20,00
19,87
6.8. bra
A tovbbiakban ismerkedjnk meg nhny gyakori hibval.
Nullponthiba
A jelleggrbe prhuzamos eltoldsa, pldul hmrskleti drift (lass
hmrskletvltozs), vagy az alkatrszek regedse kvetkeztben (9.7.
bra). Determinisztikus jelleg hiba, azaz elre szmtsba vehet s kom-
penzcival megszntethet.
t
n
y
l
e
g
e
s
e
l
m
l
e
t
i
bemenet
kimenet
6.7. bra. Nullponthiba
Meredeksgi hiba
Hasonl okokra vezethet vissza, mint a nullponthiba. A jelleggrbe
emelkedsi szge- a szenzor erstse - eltr az elmleti rtktl (6.8. bra).
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
118
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
118
n
y
l
e
g
e
s
e
l
m
l
e
t
i
bemenet
kimenet
6.8. bra. Meredeksgi hiba
Hiszterzis hiba
A kimenet nem csak a bemenjeltl, hanem annak vltozsi irnytl is
fgg (6.9. bra). Ilyen hibval tallkozhatunk mgneses szenzoroknl, vagy
Coulomb-srlds fellptekor.
t
n
y
l
e
g
e
s
e
l
m
l
e
t
i
bemenet
kimenet
6.9. bra. Hiszterzishiba
Linearitsi hiba
A jelleggrbe nem szigoran lineris lefuts, hanem az idealizlt jelleg-
grbe (lsd ksbb a regressziszmtsnl) krl egy svon bell mozog
(6.10. bra). Lehet determinisztikus jelleg, mikor a nemlinearits magbl
a fizikai elvbl szrmazik, ekkor a hiba kompenzlhat. Az is lehet, hogy
pldul kops kvetkeztben lp fel (pl. potenciomterben a vezetrteg
helyi ellenlls vltozsa), ekkor kalibrlssal sem rhet el eredmny.
Szoksos a linearitsi hibt a mrstartomnyra vonatkoztatva relatv hiba-
knt, szzalkosan megadni (lsd ksbb a 6.13. brn).
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
119
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
119
n
y
l
e
g
e
s
e
l
m
l
e
t
i
bemenet
kimenet
6.10. bra. Linearitsi hiba
6.5. A linearitssal sszefgg krdsek
Mszaki rendszerek osztlyozsnak egyik f szempontja a linearits kr-
dse. A linerisan viselked berendezsek mkdst lineris algebrai,
vagy differencilegyenletek rjk le, melyek megoldsa viszonylag egyszer.
Ezrt csekly nemlinearits esetn is linearizlt modellekkel lnk.
A rendszert linerisnak mondjuk, ha teljesl a kvetkez felttel:
) 14 . 6 ( ) x ( f c ) x ( f c ) x c x c ( f
2 2 1 1 2 2 1 1
+ = +
Pldul jellje f(x) a 3-mal val szorzs mvelett. Legyen c
1
=1, c
2
=2, x
1
=1
s x
2
=2. Ekkor a definci szerint a 2 3 2 1 3 1 2 2 1 1 3 + = + ) ( egyen-
lsget kapjuk, teht az f(x)=3x fggvny lineris.
Ha azonban g(x)=sinx, akkor 2 2 1 1 2 2 1 1 sin sin ) sin( + + , va-
gyis a g(x)=sinx fggvny nemlineris.
A linearitssal kapcsolatban kt fontos krdssel foglalkozunk. Elszr a
mrsi pontokra legjobban illeszked egyenes meghatrozsnak lehets-
gvel, majd a munkaponti linearizci krdsvel foglalkozunk.
6.5.1. Lineris regresszi szmts
A mrsi eredmnyek kirtkelsnek egyik alapfeladata a mrsi pontokra
legjobban illeszked, kellen sima grbe fektetse. Most csak a legegy-
szerbb feladatot vizsgljuk, mikor a mrssel kapott n darab P
1
(x
1
,y
1
),
P
2
(x
2
,y
2
),,Pn(x
n
,y
n
) pont kzelten egy egyenesen helyezkedik el. Az lta-
lnosan (x
i
,y
i
)
mrt rtkek jelenthetik pldul egy elmozduls mr szen-
zor sszetartoz elmozduls-feszltsg rtkeit. A mrsi pontokra val
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
120
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
120
egyenes fektetse trtnhet egyszeren prblkozssal is gy, hogy a vo-
nalzt addig mozgatjuk, mg a rajzolt vonal legjobban kveti a pontok
menett (6.11. bra).
x1 x2 x3
xn
y1
y2
y3
yn
P1
P2
P3
Pn
y1
y2
y3
yn
y
=
m
x
+
b y
x
b
6.11. bra. Egyenes illesztse a mrsi pontokra
A feladat egzaktul is megoldhat. Ttelezzk fel, hogy a keresett egyenes
egyenlete y=mx+b alak, egyelre ismeretlen meredeksggel s tengely-
metszettel. Az egyenes ltalban nem halad t a mrsi pontokon. Pldul
az i-dik x
i
abszcisszj pont y
i
mrt ordintja az egyenes y(x
i
) helyen fel-
vett mx
i
+b ordintjtl y
i
=y(x
i
)-y
i
tvolsgra van.
Az egyenes egyenletben szerepl m s b paramtereket abbl a felttelbl
hatrozzuk meg, hogy a pontok egyenestl val eltrseinek ngyzetssze-
ge a C clfggvny rtke minimlis legyen. Innen ered az eljrs neve:
legkisebb ngyzetek mdszere.
A clfggvnynek legalbb msodrend polinomnak kell lenni, hogy le-
gyen szlsrtke. Ez az igazi oka, hogy a clfggvnyben nem az eltr-
sek sszege, hanem az eltrs-ngyzetek sszege szerepel. Szmos szak-
irodalmi forrsban az eltrsek eljelvel indokoljk a ngyzetre emels
szksgessgt, de a valdi ok az elbb emltett tny.
A clfggvny rszletesebben kirva a kvetkez:
) 15 . 6 ( ) y b mx ( ...
) y b mx ( ) y b mx ( ) y ( ) b , m ( C
2
n n
2
2 2
2
1 1
n
1 i
2
i
+ +
+ + + + = =
=
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
121
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
121
A clfggvnyben az ismeretlen m s b rtkeket gy kell meghatrozni,
hogy a clfggvnynek szlsrtke (minimuma) legyen: C(m,b) mini-
mum.
Mint tudjuk, egy ktvltozs fggvnynek ott lehet szlsrtke, ahol a
fggvny egyes paramterek szerinti parcilis derivltjai kln-kln zrus
rtkek:
) 16 . 6 ( 0
b
) b , m ( C
s 0
m
) b , m ( C
=
Az m paramter szerinti derivlst elvgezve:
) 17 . 6 ( 0 x ) y b mx ( 2 ...
x ) y b mx ( 2 x ) y b mx ( 2
m
) b , m ( C
n n n
2 2 2 1 1 1
= + +
+ + + + =
Kiemelssel a kvetkez sszefggst kapjuk:
) 18 . 6 (
0 ) y x ... y x y x ( ) x ... x x ( b ) x ... x x ( m
n n 2 2 1 1 n 2 1
2
n
2
2
2
1
= + + + + + + + + + +
Egyszerbb rsmddal felrva:
) 19 . 6 ( 0 y x x b x m
i i i
2
i
= +
A clfggvny b paramter szerinti derivlsa a kvetkez eredmnyre
vezet:
) 20 . 6 (
0 ) y b mx ( 2 ... ) y b mx ( 2 ) y b mx ( 2
b
) b , m ( C
n n 2 2 1 1
= + + + + + + =
Kiemelsek utn a kvetkez sszefggst kapjuk:
) 21 . 6 ( 0 y b n x m
i i
= +
A (9.19) s (9.21) egyenletekbl ll kt ismeretlenes egyenletrendszer
megoldsval az egyenes meredeksge (melyet mszerllandnak is ne-
veznek) s tengelymetszete a kvetkez sszefggsekkel szmthat:
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
122
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
122
) 22 . 6 (
) x ( x n
y x y x n
m
2
i
2
i
i i i i
=
) 23 . 6 (
n
x m y
b
i i
=
A lineris regresszi-szmtst egy szmpldn is bemutatjuk.
Plda. A reflexis optokapu egy bizonyos tartomnyban a trgy tvols-
gval arnyos feszltsget ad. Ngy pontban (n=4) mrve a trgy tvols-
gt s a feszltsget, az albbi adatokat kaptuk:
Feladat a mrsi pontokat legjobban kzelt egyenes egyenletnek meg-
hatrozsa. A regresszis egyenes paramtereinek (meredeksg, tengely-
metszet) meghatrozsra szolgl sszefggsekben szerepl szummk
rtkeit clszer tblzatosan kiszmtani. A kzlt pldban a kimenet
feszltsg, ezrt rtelemszeren y
i
=U
i
.
Az (9.22) sszefggs alkalmazsval az egyenes meredeksge:
( )
mm / V ,
,
, ,
x x n
U x U x n
m
i i
i i i i
46 0
5 5 7 4
52 4 5 07 5 4
2 2
2
=
=
=
A tengelymetszetet (nullponteltoldst) a (9.23) sszefggsbl kapjuk:
V ,
) , ( ,
n
x m U
b
i i
71 1
4
5 46 0 52 4
=
=
=
x
i
[mm] 0,5 1 1,5 2
U
i
[V] 1,5 1,22 1 0,8
i 1 2 3 4
x
i
[mm] 0,5 1 1,5 2
x
i
=5
x
i
2
0,25 1 2,25 4
x
i
2
=7,5
U
i
[V] 1,5 1,22 1 0,8
U
i
=4,52
x
i
U
i
0,75 1,22 1,5 1,6
x
i
U
i
=5,07
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
123
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
123
A mrsi pontokat a legkisebb ngyzetes hibval kzelt U=0,46x+1,71
egyenlet egyenes a 6.12. brn lthat. Megjegyzend, hogy a lthatan
nemlineris jelleg karakterisztika nagyobb tartomnyban egyenessel val
kzeltse csak jelents hibval lehetsges.
U(V)
x (mm)
b
=
1
,
7
1
0
1
2
1 2 3,7
6.12. bra. Reflexis optokapu nhny sszetartoz rtke
A regresszis egyenes ismeretben mr vllalkozhatunk a linearitsi hiba
meghatrozsra is, amit a kvetkez pldn mutatunk be.
Plda. Az elz plda eredmnye alapjn hatrozzuk meg a szenzor
linearitsi hibjt a 0,5<x<2mm mrstartomnyban!
A linearitsi hiba a lineris karakterisztiktl val legnagyobb jeleltrs
a mrstartomnyhoz tartoz jeltartomnyra vonatkoztatva (6.13. bra).
+U1
-U2
mrstartomny
1
max
min
U
x
j
e
l
t
a
r
t
o
m
n
y
6.13. bra. Linearitsi hiba rtelmezse
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
124
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
124
Tekintsk a lineris karakterisztiknak az imnt meghatrozott regresszis
egyenest, amit a 6.13. brn szaggatott vonallal jelltnk. A linearitsi hiba
pozitv maximuma a regresszis egyenestl pozitv irnyban mrt +U
1
maximlis eltrs s az 1,5 mm-es mrstartomnyhoz tartoz
U
max
=0,46*1,5 V jeltartomny hnyadosa:
029 0
5 1 46 0
71 1 5 0 46 0 5 1
1
,
, ,
) , , , ( ,
U
U
h
max
lf
=
+
= =
A linearitsi hiba negatv maximuma rtelemszeren
043 0
5 1 46 0
71 1 1 46 0 22 1
2
,
, ,
) , , ( ,
U
U
h
max
la
=
+
= =
A fels s als eltrsek nem pontosan egyeznek meg, hiszen a regresszis
egyenes egyenlete ngyzetes tlagolssal lett megllaptva. A kzelt egye-
nes meredeksgt megtartva, de fgglegesen kiss eltolva, a linearitsi
hiba szimmetrikusan is megadhat, rtke h
l
=3,6%.
6.5.2. Fggvnykapcsolat munkaponti linearizcija
A legtbb fizikai elv a vltozk nemlineris f(x) kapcsolatval rhat le. A
nemlineris kapcsolat ltalban problmt okoz, mert a berendezsek m-
kdst ler nemlineris egyenletek megoldsa sokkal krlmnyesebb,
st sokszor zrt alakban nem is lehetsges.
Szerencsre a berendezsek jelents rsznek mkdsi tartomnya
csak egy llandsult zemllapotot jellemz n. munkapont szk krnye-
zetre korltozdik. Amennyiben a fggvnykapcsolat folytonos fgg-
vnnyel rhat le, akkor a munkapont krnyezetben a nemlineris fgg-
vny rintjvel helyettesthet. A matematikai megalapozottsgot a fgg-
vnyek Taylor-sorba fejthetsge biztostja. Egy folytonos s tbbszr
differencilhat f(x) fggvny az x
0
pontban sorba fejthet, a kapott fgg-
vnysor a pont krnyezetben jl becslhet hibval kzelti az eredeti
fggvnyt. A fggvny az x
0
pont krnyezetben az albbi Taylor-sorral
helyettesthet:
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
125
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
125
) 24 . 6 ( .... ) x x (
dx
) x ( f d
! i
1
...
) x x (
dx
) x ( f d
! 2
1
) x x (
dx
) x ( df
! 1
1
) x ( f ) x ( f
i
0
x x
) i (
) i (
2
0
x x
2
2
0
x x
0
0
0
0
+ +
+ + + =
=
=
=
Plda. Szmtsuk ki ) , sin( 55 0 kzelt rtkt!
Mivel a 0,55 radinhoz kzeli /60,524 radin (30) szgfggvnyei-
nek rtkeit ismerjk, ezrt a fggvnyt x
0
=/6 helyen fejtjk sorba a
kvetkezkpp:
... ) / , (
dx
) x (sin d
!
) / , (
dx
) x (sin d
!
) / sin( ) , sin(
x x
x x
+ +
+ + =
=
=
2
2
2
6 55 0
2
1
6 55 0
1
1
6 55 0
0
0
A sorfejtsnl felhasznlt rszletszmtsok a kvetkezk:
5 0 6
0 0
, ) / sin( x sin ) x ( f = = =
866 0 6
0
0
, ) / cos( x cos
dx
) x ( df
x x
x x
= =
=
=
5 0 6
0
0
2
2
, ) / sin( x sin
dx
) x ( f d
x x
x x
= = =
=
=
A sorfejtst csupn a harmadik tagig folytatva a kvetkez eredmnyt
kapjuk:
5227 0 6 55 0 5 0
2
1
6 55 0 866 0
1
1
5 0 55 0
2
, ... ) / , )( , (
!
) / , ( ,
!
, ) , sin( + + +
A kapott kzelt eredmny ngy tizedes pontossgig megegyezik a pon-
tos eredmnnyel.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
126
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
126
Amennyiben a Taylor-sornak csak az els kt tagjt tartjuk meg, a tbbit
elhanyagoljuk, akkor lineris sszefggst nyernk az albbiak szerint:
) 25 . 6 ( ) x x (
dx
) x ( df
) x ( f ) x ( f
0
x x
0
0
+
=
Az sszefggsben df(x)/dx
x=x0
nem ms, mint a fggvny rintjnek
m meredeksge az x
0
pontban, maga az sszefggs pedig az egy pon-
ton tmen egyenes kzpiskolbl ismert y-y
0
=m(x-x
0
) egyenlete.
Plda. Linearizljuk a x sin fggvnyt az x
0
=/6 pontban!
Az elz pldt tekintve a kt taggal trtn sorfejts eredmnye, va-
gyis a grbe munkapontbeli rintjnek egyenlete a kvetkez:
0466 0 866 0 6 866 0 5 0 , x , ) / x ( , , x sin + +
A 9.14. brn jl lthat, hogy az rint az x
0
=/6 munkapont kzelben
kis hibval kzelti a szinusz fggvnyt.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,2 0,4 0,6 0,8 1 1,2
6.14. bra. Szinusz fggvny linearizlsa az x
0
=/6 pontban
Felhvjuk a figyelmet arra a tnyre, hogy a munkaponti linearizci sorn a
nemlineris fggvnykapcsolatot csupn az egyszerbb matematikai ke-
zelhetsg rdekben helyettestjk lineris sszefggssel. A valsgos
jelleggrbe vltozatlanul nemlineris marad!
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
127
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
127
A munkaponti linearizci nem tvesztend ssze a szenzor karakteriszti-
kjnak kls elemekkel (pldul didahlzattal, vagy intelligens SMART
szenzorokban numerikusan) trtn linearizlsval, mikor nagy mkdsi
tartomnyban tnylegesen lineris kapcsolatot teremtnk a bemen s
kimen jelek kztt.
A munkaponti linearizci mdszert egy kapacitv tmr szenzor
pldjn mutatjuk be.
Plda. Egy skkondenztor egyik lemeze elmozdulhat a msikhoz kpest.
A lemezek fellete A, tvolsguk nyugalmi helyzetben x=x
0
. A lemezek
kztti teret leveg tlti ki (6.15. bra). Linearizljuk a kapacits-
elmozduls fggvnyt az x
0
munkapont krnyezetben!
x
x0
A
6.15. bra
A skkondenztor kapacitsa a
) 26 . 6 (
x
A
) x ( C
0
=
sszefggssel szmthat, vagyis a kapacits a lemezek kztti tvolsg
fggvnyben hiperbolikusan vltozik. A linearizlt sszefggs az albbi:
) 27 . 6 (
x
A 2
x
x
A
) x x )(
x
A
(
x
A
) x x (
dx
) x ( dC
) x ( C ) x ( C
0
2
0
0
2
0 0
0
x
0
0
+ =
= + = + =
Az eredeti s a linearizlt fggvnyt a 6.16. brn lthatjuk.
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
128
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
128
C0
x0
2C0
x
C
x
C
h
P
6.16. bra. A jelleggrbe egyenessel val helyettestse.
Az rint egyenes a P munkapont x krnyezetben lthatan jl kzelti
az eredeti grbt. Ha elrjuk, hogy a kzelts hibja ne haladja meg az 1
szzalkot, akkor ebbl a felttelbl meghatrozhatjuk a szenzor x meg-
engedett mrsi tartomnyt. A kapacits vltozsa a mrsi tartomnyban
x
x
A
x m C
2
0
= =
A lineris kzelts hibja a maximlis kapacitsvltozs 1 szzalka, vagyis
x
x
A
, h
max
2
0
01 0 =
lehet. A fggvny monotonitsa kvetkeztben a legnagyobb eltrs a x
intervallum bal oldali szln lp fel. A h hiba ott az eredeti (6.26) s a
linearizlt (6.27) fggvny klnbsge az x=x
0
-x/2 helyen:
x
x
A
,
x
A
)
x
x (
x
A
x
x
A
2
0 0
0
2
0
0
01 0
2
2
2
Egyszersts s rendezs utn a
0
0392 0 x , x felttelt kapjuk. A szen-
zor megengedett mkdsi tartomnya 1 szzalk hibahatr mellett a le-
mezek kezdeti tvolsgnak mindssze ngy szzalka!
A mechatronika alapjai Szenzorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
129
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
129
Amennyiben a szenzor mrsi tartomnyt ki akarjuk bvteni, akkor a
digitlis jelfeldolgozs erre is mdot ad. Egy memriban eltroljuk az
inverz nemlineris x(C) fggvnykapcsolat sszes lehetsges C rtkhez
tartoz x rtket. A mrt kapacitsrtkek alapjn az eltrolt rtkek a
memribl egyszeren kiolvashatk.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
130
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
130
7. Aktutorok
7.1. Aktutorok felptse
Az aktutorok a mechatronikai rendszer hatslncban a vezrlberende-
zs s a befolysolni kvnt folyamat, vagy rendszer kztt helyezkednek
el. Feladatuk kinematikai mennyisgek (elmozduls, sebessg, gyorsuls,
szgelforduls, szgsebessg, szggyorsuls) s/vagy dinamikai hatsok
(erk, nyomatkok) ltrehozsa. Felptsket tekintve kt f rszbl, a
teljestmnyerstbl s az energia talaktbl (magbl a beavatkoz
szervbl, a motorbl) llnak (7.1. bra). Az aktutorok a teljestmny
erstshez segdenergit hasznlnak fel, amit a kis energij vezrljellel
modullnak. Egyszerbben szlva, a segdenergit a vezrljel temben
vezrlik. Az ily mdon megnvelt energij villamos, hidraulikus, vagy
pneumatikus jelet az energia talakt mechanikai energiv alaktja t.
Teljestmny
erst
Energia-
talakt
Energia-
talakt
Modullatlan energiaforrs
kis teljestmny nagy teljestmny
vezrljel
krnyezet
Aktutor
7.1. bra. Aktutor elvi felptse.
A 7.2. bra rszletesebben mutatja be egy elektromechanikus aktutor elvi
mkdst. A teljestmnyerstst egy tranzisztor vgzi, mely a kis ener-
gij bzisramot nagyobb energij emitter ramm alaktja t, villamos
segdenergia felhasznlsval. A nagy energij jelet az elektromgneses
elven mkd DC motor alaktja t mechanikai energiv.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
131
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
131
terhels
energia talakts:
villamos-mechanikus
U
T
teljestmny ersts
vezrljel
i
B
i
B
segdenergia
7.2. bra. Elektromechanikus aktutor felptse
Az aktutorokban felhasznlt segdenergik s az azok segtsgvel trt-
n erkeltsi elvek nagyon vltozatosak lehetnek, amint az a 7.3. brn is
lthat.
Fluid energia
Henergia
K
m
i
a
i
e
n
e
r
g
i
a
E
l
e
k
t
r
o
m
o
s
e
n
e
r
g
i
a
Pneumatika
Hidraulika
Mez-erk
Atomi s
molekulris
erk
Htguls Memria-hats
Elektrolzis
nyoms
Robbansi
nyoms
Aktutor
7.3. bra. Erkelts elvei s a segdenergia fajti aktutorokban
Az aktutorok kimenetn rendelkezsre ll mechanikai energia halad,
vagy forg mozgs ltrehozst teszi lehetv. Pldul halad mozgsnl
az er s elmozduls szorzataknt rendelkezsre ll energia felhasznlha-
t nagy er s kis elmozduls, vagy kis er s nagy elmozduls prosts-
ban. A klnfle esetek ltrehozsa rdekben ltalban mechanikus tala-
ktkat (hajtmvek, orsk stb.) ptenek az aktutorok utn.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
132
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
132
7.2. Az aktutorokkal szemben tmasztott
kvetelmnyek
Az er s munkagpekkel ellenttben az aktutorokat s hajtsaikat nem
tarts zemben, hanem csak rvid ideig mkdtetik. Ezek a berendezsek
bizonyos pozcikat nagyon pontosan vesznek fel s/vagy tartanak meg.
Ezeket a specilis hajtsokat szervohajtsoknak, vagy pozcionl rendsze-
reknek nevezik. A kvetkez kvetelmnyeknek kell eleget tennik:
Ngynegyedes mkds (hajts s fkezs mindkt irnyban)
Nagy tlterhelhetsg
Nagy felbonts a pontos pozcionls elrsre
Kedvez statikus tulajdonsgok (lehetleg lineris tttel, kis srlds,
kotyogsmentessg)
Gyors mkds, j csillapts (kis idlland, tllvs-mentes bells)
Nagy sebessg- s fordulatszm-tartomny
Nagy er s nyomatk kifejts, nzrs
7.3. Aktutorok statikus jelleggrbi
Amennyiben az aktutor mozgsllapota huzamosabb ideig llandnak
tekinthet, a berendezs zemt statikusnak tekinthetjk. Az llandsult
mozgsjellemzk (sebessg, szgsebessg) s a ltrehozsukhoz szksges
erhatsok kapcsolatt a berendezsek statikus jelleggrbin tanulm-
nyozhatjuk.
Tekintsnk aktutorknt egy forg mozgst ltrehoz DC motort. A
motor ltal szolgltatott nyomatk ltalban vltozik a szgsebessg fgg-
vnyben. A kapcsolat gy llapthat meg, hogy a motort alkalmas (sr-
ld, rvnyram, genertoros stb.) fkkel lefkezzk, mikzben mrjk
a fkez nyomatkot s a hozz tartoz llandsult szgsebessget. A 7.4.
brn lthat srld fk pofi a fkdobhoz vltoztathat N
1
sN
2
ervel
szorthatk hozz az anyk lltsval. A forgs kzben a fktrcsn bre-
d srld erk M
S1
+M
S2
nyomatka fkezi a motort. A jobbra forg mo-
tor a hats-ellenhats elvbl addan ugyancsak M
S1
+M
S2
nagysg, jobb-
ra irnyul nyomatkkal akarja magval ragadni a fkszerkezetet, de azt az
altmasztsnl bred F er megakadlyozza. A fkszerkezetre hat sr-
ld nyomatkkal az F s az N
1
-N
2
=F erkbl ll erpr F*k nyomatka
tart egyenslyt.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
133
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
133
N1
F
k
MS2
MS1
N2
MS1
MS2
N2
N1
7.4. bra. Motor jelleggrbe felvtele srld fkkel
Az F er egy ermr szenzorral egyszeren mrhet. A mrst klnb-
z nagysg fkez nyomatkokkal megismtelve s az sszetartoz nyo-
matk s szgsebessg rtkeket felrajzolva kapjuk a motor statikus M
m
m
karakterisztikjt (7.5. bra). A kls gerjeszts DC motor statikus
jelleggrbje egyenes, melynek egyenlete
0
0
0
( ) . (7.1)
M
M M =
M4
4
t
M0
0
7.5. bra. Statikus jelleggrbe felvtele
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
134
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
134
A statikus jelz arra utal, hogy a jelleggrbe felvtele kzben megvrjk,
mg a terhels megvltoztatsa utn a szgsebessg llandsul. Ily mdon
a forgrsz gyorstshoz szksges forgatnyomatk hatst kikszbl-
jk. A 7.5. brn a belltott M
4
fkez nyomatkhoz tartoz llandsult
4
szgsebessg meghatrozst brzoltuk. A motor tengelye bekapcso-
ls utn T peridusidej csillapod lengseket vgez, majd nhny lengs
utn elri az llandsult
4
szgsebessget.
Szmos mechatronikai alkalmazsban a motorok szgsebessge igen
gyorsan vltozik, a tehetetlensgi hatsok ekkor semmi esetre sem hanya-
golhatk el. Ilyenkor a motorok (aktutorok) dinamikus viselkedst is
figyelembe kel venni, ami mr egyetlen jelleggrbvel nem lehetsges. K-
sbbi tanulmnyainkban a dinamikus hatsokkal rszletesen foglalkozunk.
7.4. Elektromechanikus pozcionl hajtsok
A kis s kzepes teljestmny tartomnyban sokfle elektromechanikus
hajts ltezik a legklnflbb kvetelmnyek kielgtsre. J dinamikus
tulajdonsggal s pozcionlsi pontossggal rendelkeznek. A hidraulikus
s pneumatikus rendszerekhez kpest j az sszhatsfokuk.
Alkalmazsuknak a nagy dinamikai kvetelmnyek s nagy terhel
erk szabnak korltot. Mretk viszonylag nagy a teljestmnykhz k-
pest.
7.4.1. Elektromgnes.
Kis elmozdulsok gyors ltrehozshoz kedvez eszkz (Pl. befecskende-
z rendszer). Kis tvolsgokon nagy er kifejtsre kpes. Az alapveten
ersen nemlineris er-elmozduls jelleggrbe linearizlsa rdekben a
mgneskr kialaktst gondosan kell megtervezni. Az elektromgnes
lgyvas anyagnak teltdse korltot szab a kifejthet ernek. A maxim-
lis mozgstartomny 10-25 mm
7.6. bra. Elektromgnes
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
135
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
135
7.4.2. Kommuttoros egyenram motor
Szinte kizrlag lland gerjeszts (lland mgneses, vagy mellkram-
kr) kivitelben alkalmazzk elnys tulajdonsgai miatt: az ram-
nyomatk kapcsolata lineris, az elfordulsi szgtl gyakorlatilag fggetlen,
egyenletes szgsebessg, j szablyozhatsg, kedvez dinamikus tulaj-
donsgok, nagy fordulatszm tartomny. Az egyenram motor mkd-
snek sajtossga, hogy a forg vezetben fl fordulatonknt meg kell
fordtani az ram irnyt, hogy a forgsirny vltozatlan maradjon (7.7.
bra). A feladatot megold mechanikus kommuttor htrnyos tulajdon-
sga a kops s szikrzs. Ugyancsak problms a h elvezetse a rotorbl.
+
-
D
kommuttor
mgnes
kefe
tekercs
i
7.7. bra. DC motor mkdsi elve
7.4.3. Elektronikusan kommutlt (kefe nlkli) motor
A kis s kzepes teljestmny egyenram motorok kszlnek kefe nlk-
li kivitelben is. A forgrsz lland mgnesbl kszl, a gerjeszt teker-
csek az llrszen vannak elhelyezve (7.8. bra). A megfelel llrsz te-
kercs gerjesztst vezrlelektronika vgzi, figyelembe vve a forgrsz
pillanatnyi szghelyzett. A szghelyzetet ltalban kismret Hall-elemek
rzkelik. Mivel nincs mechanikus kommuttor, nincs szikrzs, a motor
lettartama nagy. Elnys tulajdonsga tovbb, hogy a h sokkal jobban
elvezethet az llrszen lv tekercsekbl, ezrt a motor tlterhelhet. A
forgrsz tehetetlensgi nyomatka kicsi, ezrt kedvezk a motor dinami-
kus tulajdonsgai. Ugyanakkor szmos htrnyos tulajdonsga kztt
megemltend a hullmz forgatnyomatk s szgsebessg, valamint a
bonyolult vezrlelektronika s pozciszenzor-rendszer ignye, ezltal
magasabb ra.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
136
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
136
Rotor
szenzor
szenzor
bemenet
v
e
z
r
l
s
t
e
l
j
e
s
t
m
n
y
e
r
7.8. bra. Elektronikusan kommutlt (kefe nlkli) motor elvi vzlata
7.4.4. Lptetmotor
Vezrlses zemmdban, kis teljestmnyek esetn kedvezen alkalmazha-
t, tipikus mechatronikai aktutor. Az ltalban lland mgneses forg-
rsz a gerjeszt tekercsekre kapcsolt ram irnytl fggen kialakul ere-
d mgneses tr irnyba ll be. A lptetmotorok forgrszben a mg-
nes radilis, vagy axilis elrendezs lehet. Elbbi nagy lpsszgek, utb-
bi finomabb lpsszgek megvalstsra alkalmas. Nincs szksg poz-
ciszenzorokra, ezrt a lptetmotor olcs. A mkdsre azonban jelen-
ts befolyssal van a terhels, a mozgatott tmegek vltozsa, a vibrci
stb. Ezrt a lpstveszts elkerlse rdekben ersen tlmretezik. Ha
lpstveszts semmikpp nem engedhet meg, visszacsatolst is alkal-
maznak, de akkor a lptetmotoros hajts elveszti elnyeit. Htrnyos
tulajdonsga a rosszabb dinamikus viselkeds, kis teljestmnysrsg (t-
meg/teljestmny) s hatsfok.
+
+
-
-
D
D
T1
T2
T1
T2
T2 T1
D
B
7.9. bra. Lptetmotor
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
137
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
137
7.4.5. Linermotor
A viszonylag j motorfajta tulajdonkppen egy kitertett aszinkron motor-
nak is tekinthet. Tbb fajtja ismeretes. A 10.10. brn lthat motor
llrsznek fogaiban elhelyezett tekercsrendszer megfelel gerjesztsvel
trben v sebessggel halad mgneses tr hozhat ltre (7.10. bra).
Amennyiben a mozg rsz sebessge klnbzik a mgneses tr sebess-
gtl, a relatv sebessg (szlip) kvetkeztben a mozg rszben feszltsg
indukldik. A kialakul rvnyramok s a mgneses tr klcsnhats-
bl mozgater jn ltre. Az er nagysga s a csekly mozgatott tmeg
jelents gyorsuls elrst teszi lehetv. Megfelel tmr rendszerrel s
vezrlssel igen gyors s pontos mozgsok valsthatk meg pldul
ramkri elemeket beltet gpekben trtn alkalmazskor.
v
7.10. bra. Linermotor mkdsi elve
Msik gyakran alkalmazott megolds lineris mozgs ltrehozsra a hang-
szrhoz hasonl, elektrodinamikus elven mkd voice-coil motor
(7.11. bra). A mgneses krben az lland mgnes B indukcit hoz ltre.
A tekercsbe ramot vezetve a mgneses tr s az ram klcsnhatsaknt
keletkez er mozgatja a tekercset. A tekercs kis tmege gyors mozgst
tesz lehetv. A tekercs hossza, illetleg a mgnes geometriai mrete kor-
ltozza a mozgstartomnyt.
D
lland mgnes
mozg tekercs
7.11. bra. Voice-coil motor
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
138
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
138
7.5. Fluid aktutorok
Az ebbe a krbe tartoz hidraulikus s pneumatikus aktutorok (munka-
henger, membrn-motor, hidromotor) munkakzege folyadk (olaj) illetve
gz (leveg). Kzs jellemzjk a robusztus felpts s a nagy teljest-
mnysrsg. Kedvez tulajdonsguk, hogy kzvetlen lineris elmozdulst
is kpesek ltrehozni. Rendszerdinamikai kpessgk sokkal jobb a villa-
mos hajtsoknl. Htrnyuk viszont, hogy hatsfokuk rosszabb a villa-
mos hajtsoknl, nehzkes a segdenergival (tpnyoms) val elltottsg,
drgk az alkatrszek (szelepek, munkahengerek), korltozott a pozcion-
lsi pontossguk (<10m).
7.5.1. Pneumatika
A leveg sszenyomhatsga, kis viszkozitsa nagy munkavgz kpess-
get, nagy elmozdulsi utakat s nagy mkdsi sebessget tesz lehetv
nhny kN er kifejtse mellett. Extrm zemkrlmnyek kztt (magas
hmrsklet, piszok, robbansveszly, tlterhels) is megbzhat a mk-
ds. A pneumatikus berendezsek r/teljestmny viszonya kedvez.
Ugyanakkor tisztn vezrlssel a pozcionlsi pontossg korltozott. Ht-
rnyos tovbb, hogy a tpleveg elksztst ignyel, a srlds s az
sszenyomhatsg megnehezti a szablyozst, csekly a rendszer merev-
sge.
7.5.2. Hidraulika
A hidraulikus aktutorok ltal kifejtett er nagy, ugyanakkor mretk s a
mozgatott sajt tmegk kicsi, ezrt igen j dinamikus tulajdonsgokkal
rendelkeznek. Elnys tovbb a rendszer nagy merevsge, klnsen a
pneumatikus hajtsokhoz kpest. A hidraulikus hajtsokban a lineris
mozgst lehetv tev munkahengereken kvl a forg mozgst ltrehoz
hidromotoroknak klnsen nagy jelentsgk van, mivel kis mretek s
tehetetlensgi nyomatk mellett nagy forgatnyomatk kifejtsre kpesek.
A lineris mozgst megvalst munkahengerek esetben pozcionl haj-
tsoknl igen nagy kvetelmnyeket kell teljesteni a munkahenger s a
dugatty felleti minsgt illeten, hogy a nemkvnatos srlds s
stick-slip (akadoz csszs) jelensgt elkerljk.
A hidraulikus rendszerek nagy kltsgek. A 7.12. bra egy hidraulikus
rendszer felptst mutatja. A hidraulikus segdenergia elltsrl villany-
motorbl, szivattybl, visszacsap szelepbl, akkumultorbl s nyo-
mshatrol szelepbl ll tpegysg gondoskodik. Az aktutor egyik f
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
139
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
139
rsze a teljestmnyerstknt alkalmazott elektromgneses szelep (pro-
porcionlis, vagy szervo szelep), mely a kis energij villamos vezrljellel
arnyos olajnyomst hoz ltre. Az aktutor msik f rsze halad mozgs-
nl a munkahenger, vagy forg mozgsnl valamilyen hidromotor (laptos,
axildugattys, fogaskerk motor).
Teljestmnyerst
(4/3-tszelep)
M
motor
szivatty
hidraulikus
akkumultor
visszacsap-
szelep
nyomshatrol
szelep
munkahenger
hidromotor
Segdenergia
(hidraulikus tpegysg)
Hidraulikus-mechanikus
energiatalakt
(munkahenger,
hidromotor)
(nagy energiaszint) kis energiaszint
vezrljel
7.12. bra. Hidraulikus rendszer felptse
7.6. jszer aktutorok
Az anyagtudomnyok eredmnyei s j technolgik bevezetse szmos
nem hagyomnyos aktutor ltrejttt tette lehetv. Az j kutatsok
eredmnyeiknt ltrejv aktutorok ltalban csak nagyon specilis ter-
leteken nyernek felhasznlst. A felhasznlt klnleges anyagok magas ra,
az esetenknti rossz hatsfok s nagy idlland az alkalmazsokat egyel-
re mg gtolja. Az jszer aktutorokat a kvetkez tblzatban foglaltuk
ssze.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
140
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
140
Er ltrehozs elve Energia talakt Mszaki kivitel
Piezoelektromos
aktutor
Piezo motor, hajlts
elvn mkd aktutor
Magnetostriktiv
aktutor
Lineris aktutor Molekulris erk (kz-
vetlen energiatalakt)
Elektroviszkzus fo-
lyadk
Vezrelhet csillapt
Memria hats Emlkez fm Hajlt, csavar elem,
szelep
Bimetl Hajlt elem
Htguls
Tgul elem Membrn aktutor
Elektokmiai aktutor Pirotechnikai aktutor
Kmiai reakcierk
Elekrokmiai cella Membrnaktutor
A 7.13 s 7.14 brkon pldt lthatunk piezo aktutorok alkalmazsra.
Mivel egy trcsa alakvltozsa csekly, ezrt tbb trcst sorba kapcsolva
akr nhny millimteres elmozduls is ltrehozhat (7.13. bra).
U
l
l
F
F
7.13. bra. Lineris elmozduls ltrehozsnak elve piezo aktutorral
A 7.14. brn egy piezomotor sematikus rajza lthat. A piezokristlyhoz
rgztett rugalmas hasb hosszirny rezgseket vgez, mikzben P pontja
elliptikus plyt r le. A trcsval val rintkezs szakaszban forgatnyo-
matkot fejt ki.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
141
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
141
P
P
7.14. bra. Piezomotor
Az emlkez fm (NiTiNol, Memory Alloy) aktutorknt val alkalmazsa
az tvzet martenzites s ausztenites szvetszerkezeti vltozsakor bek-
vetkez kristlyszerkezeti vltozsokra vezethet vissza. Kb. 70-80C h-
mrskletre melegtve az tvzetet, az visszanyeri eredeti deformlatlan
alakjt (7.15. bra). Szobahmrskletre visszahlve ismt a deformlt
alakjt veszi fel. Ezt a tulajdonsgot felhasznlva rendkvl egyszer szer-
kezet, ltalban huzalbl kszlt aktutorok kszthetk, pldul szele-
pek, robotmegfogk. A melegtst egyszeren a huzalba vezetett villamos
ram hhatsa vgzi. A mkdsi frekvencinak a visszahlsi id szab
korltot. Kismret aktutoroknl 1-2 Hz is elrhet. Termszetesen az
emlkez fmmel kifejthet er korltozott. Az emlkez fm msik r-
dekes tulajdonsga a nagyfok rugalmassg marad deformci nlkl.
Martenzit deformlva
felmelegtve:
Martenzit ->Ausztenit
lehtve:
Ausztenit->Martenzit
7.15. bra. Emlkez fm
Az elektroviszkzus folyadk olyan szuszpenzi, melyben nemfmes rszecs-
kk villamosan nem vezet olajban vannak eloszlatva. Villamos tr hats-
ra a folyadk a msodperc tredke alatt megvltoztatja viszkozitst. A
villamos tr fenntartsa mindssze nhny watt teljestmnyt ignyel. Az
elektroviszkzus folyadk olyan lengscsillaptkban alkalmazhat, ahol a
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
142
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
142
csillaptsi tnyez rtke az tviszonyoknak megfelelen vltoztathat s
ezzel a komfortrzet nvelhet.
A nano s mikromret szerkezetek, a MEMS (Mikro-Electro-Mecha-
nical Systems) alkalmazsa a gygyszatban, biotechnolgiban, rkutats-
ban stb. nagy jelentsg. Az elektromechanikus mikroaktutorok s mik-
roszenzorok kszlhetnek hagyomnyos mikro-megmunklsi eljrsokkal
s IC gyrtsi technolgival, valamint LIGA technolgival. A 7.16. b-
rn bemutatott mikrotkr-aktutor (pldul egy projektor fnyeltrt
mtrixtmbjnek egy szegmense) egy rugalmas konzolra szerelt lland
mgnesbl, egy sk spirlis tekercsbl s a vezrl IC-bl ll. Az egsz
szerkezet rtegelt epoxi hordozbl s nhny szzad millimter vastags-
g rz rtegekbl ll lemezbl kszlt maratssal. A MEMS tervezse s
gyrtsa kpezi a mechatronika cscst, itt figyelhet meg legjobban a
klnbz tpus fizikai rendszerek magas fok integrcija s szinergikus
egymsra hatsa.
tkr
lland mgnes
rz konzol
epoxi hordoz
vezrl IC
er
spirl alak
mikrotekercs
(alulnzet)
spirl alak
mikrotekercs
7.16. bra. Elektromgneses mikroaktutor
7.7. Aktutorok alkalmazsi kre
A tervezt dilemma el lltja az aktutorok szles vlasztka. Sok esetben
ugyanarra a feladatra tbb j megolds is ltezik, mint az a 7.17. bra ter-
leteinek tfedsbl is ltszik. A mozgat er, a mozgstartomny s a
pozcionlsi id fggvnyben a teljessg ignye nlkl az bra segt
kivlasztani a lehetsges megoldst.
A mechatronika alapjai Aktutorok
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
143
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
143
0,01 0,1
1 10 100
0,1
1
10
100
1000
Mozgstartomny [mm]
M
o
z
g
a
t
e
r
[
N
]
1
2
3
4
5
6
1 egyenram motor-ors
2 lptetmotor-ors
3 elektromgnes
4 hidraulika
5 pneumatika
6 piezo
6
4
5
1
3
2
1 10 100 1000
Pozcionlsi id [ms]
7.17. bra. Aktutorok alkalmazsi kre Heimann-Gerth-Popp:
Mechatronik c. knyve alapjn
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
144
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
144
8. Mozgs-talaktk a
mechatronikban
Mechatronikai berendezsekben szinte minden esetben valamilyen halad,
vagy forg mozgs tmeget kell mozgatni s valamely helyzetben pozci-
onlni. Gondoljunk egy szerszmgp sznszerkezetre, egy robot karjra,
vagy egy kamera optikamozgat szerkezetre. A mozgsokat s erket
aktutorokkal hozzuk ltre, m ezek kzvetlenl ritkn alkalmasak a vg-
cl megvalstsra. A mozgsokat s erket valamilyen mozgs-
talaktval illeszteni kell a hajtott berendezshez, vagy folyamathoz.
A hajt egysgbl (motorbl), talaktbl s hajtott egysgbl ll rend-
szert hajtslncnak nevezzk.
Hajt gp
(aktutor)
talakt
"i"
Hajtott gp
) F ( M
1 1
) F ( M
2 2
) v ( ,
1 1
) v ( ,
2 2
8.1. bra. Hajtslnc ltalnos felptse
A kvetkez rszben ttekintjk a hajtslnc elemeinek fontosabb krdseit.
A hajtott gp (szerszmgp, genertor, jrm, csvezetk stb.) nyoma-
tkignye szgsebessgnek fggvnyben szintn vltozik, mely kapcsola-
tot hasonlan lehet kimrni, mint a motorok statikus jelleggrbit. A haj-
tott gp (folyamat) egy tipikus M
g
-
g
jelleggrbjt a 11.4. brn folytonos
vonallal jelltk.
8.1. Gpcsoport munkapontja
Egyszersg kedvrt elszr tekintsk azt az esetet, mikor a hajt motor
s a hajtott gp tengelye kzvetlenl van egymshoz kapcsolva. lland-
sult zemllapotban a hajt gp forgatnyomatka ppen megegyezik a
hajtott gp (folyamat) ltal ignyelt forgatnyomatkkal, ezrt a forgr-
szek lland szgsebessggel forognak.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
145
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
145
Az llandsult szgsebessg s az tvitt forgatnyomatk ltal meghatro-
zott zemllapotot munkapontnak nevezzk.
A munkapontban kialakult egyenslyt legfeljebb kis kls vagy bels hat-
sok zavarjk meg, minek hatsra a szgsebessg a munkaponti rtk k-
rl ingadozik.
A terhels nyomatkignye ltalban szintn vltozik a sebessg fgg-
vnyben. A 8.2. brn vzolt gp jelleggrbe jellemz lehet pldul egy
gpkocsira, aminek nyomatkignye egy lland grdlsi ellenllsbl s
egy sebessg ngyzetvel arnyos kzegellenllsbl tevdik ssze (fgg-
legesen eltolt msodfok parabola). A hajt s a hajtott gp szgsebessge
annl az rtknl llandsul, ahol a motor hajtnyomatka ppen meg-
egyezik a hajtott gp nyomatkignyvel. A kt nyomatk azonossga
azonban mg nem felttlenl jelenti azt, hogy a kt gp tartsan kpes
egytt dolgozni a munkapontban. Ttelezzk fel azt az esetet, amikor a
kt gp a P
1
munkapontban zemel s valamilyen oknl fogva (pldul
kls fkez hats miatt) a szgsebessgk kiss lecskken. A motor ltal
kifejtett nyomatk ekkor kisebb lesz, mint az ehhez a szgsebessghez
ignyelt nyomatk, azaz az ered M nyomatk negatv lesz. A dinamika
alaptrvnye rtelmben a forgrszek szggyorsulsa is negatv lesz,
teht a forgrszek lassulni kezdenek. Ez a tendencia a P
1
munkaponttl
balra vgig fennll, vagyis a gpek szgsebessge egyre cskken, vgl
lellnak. A P
1
munkaponttl kiss jobbra (egszen a P
2
pontig) viszont a
motor ltal biztostott nyomatk nagyobb, mint a gp ltal ignyelt nyoma-
tk (brn stttett terlet), ezrt a gpek gyorsulnak. Megllapthatjuk,
hogy a P
1
munkapont nem stabil zemllapota a gpeknek, mert a legki-
sebb kls zavarsra az j munkapont tvolodik az eredeti munkaponttl,
nem tr vissza az eredeti helyzetbe.
G
p
M
o
t
o
r
M
1
P
2
P
1
+M
+gyorsul -lassul -lassul
8.2. bra. Munkapont stabilitsa
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
146
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
146
Tekintsk most azt az esetet, mikor a gpek a P
2
munkapontban zemel-
nek. Ha most valamilyen zavars kvetkeztben kiss lecskken a szgse-
bessg, a motor nyomatka nagyobb vlik, mint az ignyelt nyomatk, s
a pozitv nyomatkklnbsg visszagyorstja a forgrszeket a P
2
pontnak
megfelel szgsebessgre. Ellenkez esetben, ha a szgsebessg megn, a
motor nyomatka kisebb lesz a terhel nyomatknl, kvetkezskppen a
szgsebessg cskkenni kezd egszen addig, amg a P
2
pontnak megfelel
szgsebessg helyrell. Az egyenslyi llapot megzavarsa utn visszall az
eredeti llapot, teht a munkapont stabil.
A munkapont stabilitsa a motor s a hajtott gp jelleggrbjnek
munkapontbeli meredeksgi viszonyaitl fgg.
A stabilits felttele, hogy a munkapontban a hajtott gp jelleggrbjnek
meredeksge (dM/d derivltja) nagyobb legyen, mint a hajt gp jelleg-
grbjnek meredeksge.
8.2. Mozgs-talaktk felosztsa
A hajt s hajtott gp vagy sok esetben az aktutor s a befolysolni
kvnt folyamat mechanikai jellemzit mdostani, egymshoz illeszteni
kell. Pldul ha az aktutor (a motor) fordulatszma tl nagy s nyomatka
tl kicsi ahhoz, hogy egy autt kpes legyen elindtani, akkor mdostani
kell a fordulatszmt s termszetesen a teljestmny llandsga miatt a
nyomatkt is, hogy a terhelsnek megfeleljen. A mechanikai jellemzk
mdostst az talaktk vgzik, melyek a mozgsjellemzket (sebessg,
gyorsuls, szgsebessg), valamint az erket s nyomatkokat alaktjk t.
Ilyen mozgs-talaktk pldul a fogaskerk-hajts, lnchajts, szjhajts,
fogasszj-hajts, ors-anya, szalaghajts, klnfle btyks s karos me-
chanizmusok, mltai kereszt stb. Az talaktkon bell megklnbzte-
tnk transzformtorokat s vltkat. A transzformtorok azonos tpus
mozgsjellemzk talaktst vgzik, azaz forg mozgst forg mozgss
alaktanak t. Ezzel szemben a vltk megvltoztatjk a mozgsjellemzk
tpust is. A kvetkez tblzatban a mechanikus mozgs-talaktk n-
hny tpust brzoltuk.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
147
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
147
8.1. tblzat. Mechanikus mozgs-talaktk felosztsa
forg-forg fogaskerk-pr, lnchajts,
szjhajts, drzshajts, ml-
tai-kereszt
Transzformtor
halad-halad Kartttel
Vlt forg-halad Ors-anya, fogaskerk-
fogaslc, szinusz-
mechanizmus
8.2.1. Fogaskerkhajts
Gyakran alkalmazott talakt, mely j hatsfok knyszerkapcsolatot
teremt a hajt s a hajtott gp kztt. tttele a kiskerk minimlisan
szksges fogszma miatt korltozott, egy fokozatban hatnl nagyobb
tttel ritka.
8.3. bra. Fogaskerkpr
8.2.2. Bolygm
A bolygm specilis fogaskerk hajtm. Kt szabadsgfoka rvn kt
behajt tengely (pl. a napkerk s a kar) fordulatszmbl kpezi a kihajt
tengely (gyrkerk) fordulatszmt. Nyomatkosztsra is alkalmazhat
jrmvek differencilmvben. Tmr felptse j helykihasznlst biz-
tost. A 8.4. brn lthat bolygm fogaskerekeit egyszersg kedvrt
hengerekkel brzoltuk.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
148
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
148
n
k
gy
bolygkerekek
napkerk
gyrkerk
kar
8.4. bra. Bolygm
8.2.3. Hullmhajtm
A hullmhajtm rugalmas, fogazott gyrje az ovlis genertor krbefor-
gatsakor a bels fogazat kerken grdl le. Elnys tulajdonsga, hogy
egy fokozattal nagy lasst tttel rhet el.
8.5. bra. Hullmhajtm.
8.2.4. Csigahajts
A csigahajtssal nagyobb tttel valsthat meg egymsra merleges, kit-
r tengelyek kztt. A csigakerk egyetlen krlfordulshoz az egy be-
kezds csignak annyi fordulatot kell megtennie, mint a csigakerk fog-
szma. Mivel a csiga s a csigakerk rintkez felleteti cssznak egym-
son, a hatsfok nagyon rossz. Klnleges tulajdonsga a csigahajtsnak az
nzrs, ami azt jelenti, hogy a csiga tudja hajtani a csigakereket, de fordt-
va nem.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
149
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
149
csigakerk
csiga
8.4. bra. Csigahajts
8.2.5. Bordsszjas hajts
Nagyobb tengelytvok thidalsra alkalmas. A szj s a kerekek bordi
knyszerkapcsolatot biztostanak, mikzben a hajts rugalmas marad. Az
tttel a hajtott s a hajt trcsa fogszmnak arnytl fgg. Nmely
esetben (nyomtat, plotter) a szjat egyenes vonal mozgs ltrehozsra is
hasznljk.
8.4. bra. Bordsszj
8.2.6. Ors-anya tttel
Gyakran alkalmazott talakt, mely az ors forg mozgst az anya hala-
d mozgsv alaktja t. A pontossg s a hatsfok nvelse rdekben
jabban a kszrlt ors s az anya menetei kztt a terhelst grdlve
mozg golyk adjk t.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
150
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
150
anya
ors
goly-
visszavezets
8.5. bra. Golysors
8.2.7. Vonelemes hajts
A kznapi letbl ismert szj s lnchajtson kvl lteznek specilis von-
elemes hajtsok is. A 8.6. brn bemutatott aclhuzalos hajtsnl a motor
tengelyre csavart aclhuzal fel- s letekeredse biztostja a kocsi halad
mozgst.
8.6. bra. Aclhuzal vonelemes hajts
8.2.8. Mltai-kereszt
Szakaszos mozgs megvalstsra szolgl a mltai-kereszt. A jobb oldali
trcsa egyszeri krlfordtsakor a mltai-kereszt negyed fordulatot tesz
meg, mikzben a peridusid nagy rszben lland szghelyzetben ma-
rad. Mechanizmusok gyakori eleme, rgebben a mozigpekben a film koc-
knknti tovbbtst is ez vgezte.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
151
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
151
8.7. bra. Mltai-kereszt
8.3. Az tttel, mint az talakt jellemzje
Az talaktk jellemz paramtere az tttel, amit leggyakrabban kinemati-
kailag rtelmeznk.
tttel alatt a bemen oldali mozgsjellemz (elmozduls, elfordulsi
szg, illetve sebessg, szgsebessg) s a kimen oldali mozgsjellemz
hnyadost rtjk. Matematikailag megfogalmazva
) 1 . 8 ( . i
ki
be
=
Az talaktk tttelt bels felptsk, geometriai jellemzi hatrozzk
meg. Az talaktk tbbsgnek tttele lland (pl. fogaskerkpr), kisebb
rszknl az tttel vltoz (pl. mltai kereszt), vagy vltoztathat (pl.
tbbfokozat sebessgvlt).
A kt leggyakoribb talakt tttelnek meghatrozsval rszleteseb-
ben is foglalkozunk.
8.3.1. Fogaskerkhajts tttele
Elszr az idelis, vesztesgmentes fogaskerkhajts tttelnek meghat-
rozsval foglalkozunk (8.8. bra).
A vizsglatokban tkletesen merev szerkezeti elemek srldsmentes
kapcsolatt ttelezzk fel.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
152
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
152
be
ki
1
r
2
r
be
M
1
r
2
r v
k
F
k
F
a) szgsebessgek b) nyomatkok
8.8. bra. Fogaskerkhajts tttele
A fogaskerekek rintkezsi pontjban a kerleti sebessgek megegyeznek,
ezrt a 8.8. bra jellseivel
1 2
(8.2)
be ki
v r r = =
ahol r
1
s r
2
a fogaskerekek grdlkrei. Az tttel
ki be
i = definci-
jt alkalmazva, a (11.2) sszefggsbl kifejezhetjk a szgsebessgek
arnyt:
) 3 . 8 (
r
r
i
1
2
ki
be
=
=
A grdlkrk
1 1
mz r = s
2 2
mz r = sugarai azonban arnyosak a fog-
szmokkal (arnyossgi tnyez a fogak nagysgra jellemz m modul),
ezrt a fogaskerkhajts tttele legegyszerbben a fogszmokkal fejezhe-
t ki.
A fogaskerkhajts tttele: ) 4 . 8 (
z
z
i
1
2
=
Amennyiben i>1, lasst tttelrl beszlnk.
A fogaskerkhajts nem csak a tengelyek szgsebessgeit, hanem az
tvitt nyomatkot is mdostja. A hats-ellenhats elvnek rtelmben a
hajt s a hajtott fogaskerken a kapcsold fogakra hat F
k
kerleti er-
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
153
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
153
komponensek nagysga azonos, teht ugyanakkora nagysg, ellenttes
rtelm F
k
er forgatja a hajtott fogaskereket is. Ha a hajt fogaskerkre
hat errendszer M
be
-F
k
r
1
=0 nyomatki egyenslyi egyenletbl kifejezzk
az F
k
kerleti ert, akkor ezzel felrhatjuk a hajtott oldalra hat forgat-
nyomatkot (8.8. bra):
2 2
1
(8.5)
be
ki k
M
M F r r
r
= =
Az tttel (8.3) defincijt alkalmazva, a (8.3) sszefggsbl a nyomat-
kok arnya is kifejezhet:
1
(8.6)
be
ki
M
M i
=
A lasst tttel alkalmazsval teht nvelni lehet a hajtott gpnek tadott
nyomatkot. Idelis, vesztesg nlkli fogaskerkhajtsra a P
be
bemeneti s
a P
ki
kimeneti teljestmny megegyezik, amint az a levezetsbl is ltszik:
( )( ) (8.7)
ki
be be ki ki ki
M
M i M
i
= =
8.3.2. Ors-anya hajts tttele
Az idelis ors-anya pr tttele a hajt ors elfordulsi szgnek s az
anya x tengelyirny elmozdulsnak hnyadosaknt rtelmezhet: i = / x.
Az tttel meghatrozshoz induljunk ki abbl az ismert tnybl, hogy az
ors nem ms, mint egy r sugar hengerre tekert hajlsszg lejt (8.9.
bra). A lejt hajlsszgnek (az ors menetemelkedsi szgnek) tangenst
gy szmthatjuk ki, ha a h menetemelkedst kt menet kztti tvolsgot
elosztjuk az ors kerletvel.
Mikzben az ors egy teljes krlfordulst vgez (=2 radin), addig
az anya menetemelkedsnyi utat (x=h) tesz meg, ha az ors axilis mozg-
st, valamint az anya elfordulst megakadlyozzuk. Tetszleges elfor-
dulsi szgnek viszont x elmozduls felel meg (8.9. bra stttett hrom-
szgei).
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
154
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
154
F
Fk
N
h
2r
F
N
Fk
x
r
x
8.9. bra. Csavar szrmaztatsa s erhatsok az anyn
A hromszgek kztti hasonlsgot arnyprral felrva kifejezhetjk az
tttelt:
2
(8.8)
2
o
r x
i
r h x h
= = =
Az ors-anya talakt tttele ) 9 . 8 (
h
2
i
o
=
Az tttel a sebessgekre is azonos, amit belthatunk a (8.8) egyenlet id
szerinti derivlsval (vegyk figyelembe, hogy konstans derivltja=0):
) 10 . 8 ( i
x v
v x 0
x
x x
0
x
2
=
= =
=
Az tttel termszetesen az erhatsokat is mdostja. Az egyszersg
kedvrt tekintsk gy, hogy az ll orsn forgatjuk az anyt. Az anyra
hat erket egyetlen pontba koncentrljuk (brn vonalkzott rszlet). Az
anyra axilisan mkdtetett F er ellenben az anyt F
k
=M/r kerleti
ervel tudjuk elfordtani. Az anyra hat hrom er egyenslyt a vektor-
bra szemllteti. A vektorbrbl a tengelyirny s a kerleti er kapcso-
lata (8.9. bra):
/ 2
(8.11)
/2
k
F M r
F M
tg h r h
= = =
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
155
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
155
A hajt nyomatk s az anyra hat tengelyirny er arnya innen
1
(8.12)
o
M
F i
=
8.3.3. Sorosan kapcsolt tttelek eredje
Gyakran olyan nagy tttelre van szksg, melyet nem lehetsges egyetlen
fokozatban ltrehozni. Pldaknt emlthetjk egy olyan programvezrl
(idkapcsol) dobjt, mely egy nap alatt csupn egyszer fordul krbe.
Ilyen esetben megoldst jelenthet, ha tbb hajtmvet kapcsolnak egyms
utn. Az ered tttel meghatrozst ktfokozat fogaskerkhajtson
mutatjuk be, az eredmnyt pedig ltalnostjuk. Tekintsk a 8.10. brt!
1
r1
r2 r3
r4
8.10. bra. Sorba kapcsolt tttelek eredje
Az r
2
s r
1
sugar fogaskerekekbl ll els fokozat kihajt tengelye ssze
van kapcsolva az r
4
s r
3
fogaskerekekbl ll msodik fokozat behajt
tengelyvel. Az els fokozatra az tttel
1
1
2
. (8.13) i
=
A msodik fokozatra felrva az tttelt s a kzps (kzl) tengely szg-
sebessgt kifejezve
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
156
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
156
) 14 . 8 ( i i
3 2 2
3
2
2
=
=
Az
2
szgsebessg rtkt a (8.13) egyenletbe helyettestve az
1
1
2 3
(8.15) i
i
sszefggst nyerjk, ahonnan az ered tttel kifejezhet:
1
1 2
3
(8.16) i i i
= =
Az ered tttel teht az egyms utn kvetkez tttelek szorzata. Ez a
megllapts tetszleges fajtj tttelre is rvnyes.
8.4. Mozgs-talaktk hatsfoka
A valsgos mozgs-talaktkban fellp srlds, valamint az alkatr-
szek rugalmas deformcija kvetkeztben a kimeneti oldalon mrhet
teljestmny kisebb, mint a bemeneti oldalon. Az talakt jsgt a ha-
tsfokval vehetjk szmtsba, amit a kvetkez mdon definilunk:
(8.17)
ki ki ki
be be be
P M
P M
= =
A hatsfok egynl kisebb szm. A hatsfokot vagy a szgsebessgek ar-
nyra (kinematikai hatsfok), vagy a nyomatkok arnyra (dinamikai ha-
tsfok) rtelmezhetjk.
8.4.1. Kinematikai (alakzr) knyszerkapcsolat
A tkletesen merev alkatrszek kinematikai knyszerkapcsolata kvetkez-
tben a szgsebessgek arnya az elmleti kinematikai tttelnek megfele-
len alakul, viszont a nyomatkok arnyban eltrs mutatkozik a srld-
si vesztesgek miatt. Ez az eset a fogaskerk-fogaskerk, ors-anya hajt-
sok esetn. A (8.17) sszefggst trva az talakt hatsfoka a kvetkez:
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
157
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
157
) 18 . 8 (
i
1
M
M
i
M
M
M
M
M
M
M
M
d ki
be be
ki
be
kielm
be
ki
kielm
ki
d
= = = = =
mikzben
i
be
ki
= kapcsolat teljesl.
8.4.2. Erzr kapcsolat
Ilyen esettel tallkozunk pldul szjhajts esetben. A hats-ellenhats
elvnek rtelmben a szj a hajt s a hajtott szjtrcskra azonos kerleti
ert fejt ki. A hajt- s hajtott oldali nyomatkok arnyra teht teljesl az
elmleti ttteli viszony, viszont a szerkezeti elemek rugalmas deformci-
ja kvetkeztben a szgsebessgek arnyra nem ll fenn az elmleti tt-
teli viszony. A (8.17) sszefggs alkalmazsval a hatsfok
) 19 . 8 ( .
i
i
1
k ki
be be
ki
be
kielm
be
ki
kielm
ki
k
= =
mikzben
be ki
iM M = kapcsolat teljesl.
Szoks a szgsebessgek arnynak elmleti rtktl val eltrsre a
szlip (csszs) fogalmt bevezetni, jllehet a szgsebessg-arny mdo-
sulsrt sokkal kevsb felels a szj trcsn val megcsszsa, mint a szj
terhels alatti nylsa.
A szlip a nvleges szgsebessgre vonatkoztatott szzalkos szgsebessg
eltrs.
) 20 . 8 (
i
i
i
s
be
ki be
be
ki
be
elm , ki
ki elm , ki
=
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
158
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
158
trendezve (8.21)-t, a kvetkez sszefggst nyerjk:
) 21 . 8 (
s 1
i
ki
be
sszehasonltva (8.21) s (8.19) sszefggseket, a hatsfok s a szlip k-
ztt egyszer kapcsolat mutathat ki:
) 22 . 8 ( s 1 =
Plda. A motor r
1
=50mm s r
2
=100mm sugar szjtrcskon tvetett szj-
jal s h=50mm menetemelkeds golysorsval mozgatja a szerszmgp
sznszerkezett. A szjhajts szlipje 6% (s=0,06), az ors-anya talakt
hatsfoka
o
=0,98. A motor =500 rad/s szgsebessggel forog s
P=1kW teljestmnyt ad le. Hatrozzuk meg az asztal v sebessgt s az F
forgcsol ert!
r1
r2
Motor
1
v
2
F
94 , 0
sz
=
98 , 0
o
=
8.11. bra. sszetett hajtslnc hatsfoka
A tmegek nem gyorsulnak, a motor teljestmnye a forgcsolsra s a
vesztesgek fedezsre fordtdik. Az ors-anya pr tttele
i
o
=2/h=125,66 rad/m rtk, a szjhajts elmleti tttele
2 r / r i
1 2 sz
= = . Az ered kinematikai tttel szmtsakor figyelembe
vesszk, hogy az ors-anya tttel alakzr ) 1 (
ok
= , mg a szjhajts er-
zr ) 94 , 0 (
szk
= . Az ered tttel a kinematikai hatsfokokkal figyelem-
be vett rsz-tttelek szorzata, ahonnan az asztal sebessge kifejezhet:
s / m 87 , 1 500
66 , 125 2
1 94 , 0
i i
v
i i
v
mot
o
ok
sz
szk
ok
o
szk
sz mot
=
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
159
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
159
A forgcsolsra fordtd er szmtsakor a szj csszsa nem befolysol-
ja az erket ) 1 (
szd
= , ellenben a csavar-anya hajts hatsfoka a srldsi
vesztesg kvetkeztben 98 , 0
od
= . A motor nyomatka a teljestmny-
bl szmolva . Nm 2 / P M
mot mot
= =
N 59 , 492 2 66 , 125 2 98 , 0 1 M i i F
i
1
i
1
F
M
mot o sz od szd
o od sz szd
mot
= = =
=
A hasznos, forgcsolsra fordtd teljestmny
W , , , Fv P
h
2 921 87 1 59 492 = = =
Ha az elzekben a v s F szmtsra vonatkoz sszefggseket alkal-
mazzuk, akkor a kimen teljestmny:
[ ]
W 2 , 921 1000 98 , 0 94 , 0
P
i
1
i
M ) i ( i P
be szk od mot
o sz
szk
mot o od sz h
= =
= =
=
A kapott eredmnyt ltalnostva megfogalmazhatjuk a kvetkez lltst:
Az ered hatsfok a rszhatsfokok szorzataknt szmthat.
8.5. Az tttel optimlis megvlasztsa
A hajt s a hajtott gp nyomatk-szgsebessg illesztst biztost tala-
kt tttelt tbb szempont alapjn vlaszthatjuk meg. Az lland sebes-
sggel zemel hajtslnc maximlis teljestmny-tvitelre val optimaliz-
lst egy kevergp pldjn mutatjuk be (8.13. bra).
Plda. A kevergpet egy ismert jelleggrbj DC motor hajtja meg. A
kevergp sr ppes anyagot kever, ezrt nyomatkignye a szgsebes-
sggel arnyos csillaptsnak megfelelen M
g
=K
g
. A motor s a kever-
gp jelleggrbi a 8.13. brn lthatk. A kt gp els esetben kzvetlenl
van sszekapcsolva. Tapasztalat szerint a leadott teljestmny tovbb n-
velhet. Clunk az adott motorral elrhet lehetsges legnagyobb keversi
teljestmny elrst biztost tttel meghatrozsa.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
160
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
160
i
g g
, M
g g
, M
m m
, M
m m
, M
Motor
Gp
g gi g gi
i , i / M M = =
Gp tttellel
a) b)
8.12. bra. A kevergp kzvetlen hajtssal s tttellel
m
6 Nm
600 rad/s
5 Nm
250 rad/s
g
Motor Gp
M
4 Nm
200 rad/s
Motor+Gp
P
Mm Mg
8.13. bra. Motor s kevergp statikus jelleggrbi
A motor s a gp jelleggrbit kzs brba rajzolva, kzvetlen hajts
esetn a munkapont az egyenesek metszspontjaknt addik. A kt ssze-
kapcsolt gp ezzel a kzs szgsebessggel zemel. A kt jelleggrbe ana-
litikusan is megadhat az
m m
, M 01 0 6 =
g g
, M 02 0 =
egyenletekkel. Az egyenletrendszert megoldva a munkapont =200 rad/s-
nl tallhat, az tvitt nyomatk M=4 Nm, a leadott teljestmny
P=M=800 W.
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
161
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
161
Vizsgljuk meg, hogy az tvitt teljestmny nvelhet-e? A motor ltal
leadhat teljestmny a
) , ( M P
m
01 0 6 = =
sszefggs szerint a szgsebessg fggvnyben vltozik. Maximlis r-
tke ott van, ahol a P() fggvny rintje vzszintes, vagyis szerinti
derivltja zrus. A szorzatfggvny derivlsi szablyt alkalmazva, a kere-
sett szgsebessg
s / rad 300 0 ) 01 , 0 6 ( 01 , 0
d
dP
= = + =
.
A motor ezen a szgsebessgen M=6-0,01300=3 Nm nyomatkot kpes
kifejteni. Megfelel tttel vlasztsval azt kell elrnnk, hogy a hajtott
gp
m
=
gi
=300 1/s szgsebessgnl M
m
=M
gi
=3 Nm nyomatkot ig-
nyeljen. Amennyiben a gpet illesztjk a motorhoz, a transzformtort (t-
ttelt) a gppel egybeptve kpzelhetjk (8.12b. bra). A motor oldalrl
nzve az tttellel egybeptett gp M
gi
nyomatkignye s hozz tartoz
gi
szgsebessge a kvetkez:
g gi
g
gi
i s
i
M
M = =
A gp eredeti M
g
=0,02
g
egyenlett felhasznlva, az tttellel egybeptett
gp egyenlete a kvetkez lesz:
2
02 0 02 0
i i
M
gi g
gi
, ,
= = .
Helyettestsk a maximlis teljestmny munkapont M=3 Nm s =300
rad/s adatait az elbbi egyenletbe, majd fejezzk ki az tttelt:
2
300 02 0
3
2
=
= i
i
,
A maximlis keversi teljestmnyt biztost tttelt kzelten z
2
=28 s
z
1
=20 fogszm fogaskerekekkel lehet megvalstani. A leadott teljest-
mny P
2
=M
2
2
= 3300=900 W, ami valban nagyobb, mint a hajtm
nlkli esetben tvitt teljestmny. A hajtmvel illesztett gp nyomatk-
A mechatronika alapjai Mozgs-talaktk a mechatronikban
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
162
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
162
szgsebessg karakterisztikja s P
2
munkapontja a 8.14. brn lthat, a
vonalkzott terlet az tadott teljestmnnyel arnyos.
A bemutatott tttel szmtsi feladat a maximlis leadott teljestmny
elrst clozta. Bizonyos esetekben viszont olyan munkapont belltsa a
cl, ahol nem a teljestmny, hanem a berendezs hatsfoka optimlis.
1
P
2
P
M
3 Nm
300 rad/s
8.14. bra. Motor s tttellel illesztett terhels munkapontja
A mechatronika alapjai Rvidtsek
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
163
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
163
Rvidtsek
ABS Antilock Brake System (blokkolsgtl)
AC Alternating Current (vltram)
AM Amplitude Modulation
CAN Controlled Area Network
CCD Charge Coupled Device (tltscsatolt eszkz)
CD Compact Disc
CMOS Complementary Metal Oxide Semiconductor
DC Direct Current (egyenram)
DVD Digital Versatile Disc
FET Field Effect Transistor
FM Frequency Modulation
IC Integrated Circuit
LED Light Emitting Diode (vilgt dida)
LVDT Linear Variable Differential Transformer
MEMS Micro Electro Mechanical Systems
NC Numerically Controlled
PID Proportional Integral Differential (PID szablyz)
PLC Programmable Logic Controller
PSD Position Sensitive Detector
PWM Pulse Width Modulation
RMS Root Mean Square (ngyzetes kzp, effektv rtk)
S&H Sample&Hold (mintavev-tart)
TCS Traction Control System
VDC Vehicle Dinamic Control
A mechatronika alapjai Irodalom
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
164
A dokumentum hasznlata | Tartalomjegyzk | Irodalom Vissza
164
Irodalom
Roddeck, Werner: Einfhrung in die Mechatronik. Stuttgart, 1997, B. G.
Teubner
Bradley, D. A., Dawson, D., Burd, N.C.: Mechatronics. Gateshead, 1991,
Atheneum Press Ltd.
Bishop, Robert (szerk.): The Mechatronics Handbook. London New York
Washington D. C., 2002, CRC Press LLC
Onwubolu, Godfrey: Mechatronics. Amsterdam-Boston-Heidelberg, 2005,
Elsevier
Harshama, F., Tomizuka, M., Fukuda, T.: Mechatronics-What is it, why and
how? IEEE/ASME Transactions on Mechatronics, Vol.1, No.1, 1996,
pp.1-4.
Auslander, D.M.,Kempf, C.J.: Mechatronics: Mechanical System Interfacing,
Upper Saddle Riover, 1996, Prentice Hall
Parker, Michael: Physics of optoelectronics. Boca Raton, 2005, CRC Press
brahm Gyrgy (szerk.): Optika. Budapest, 1997, Panem-McGraw-Hill
Isermann, R.: Mechatronische Systeme. Berlin, 1999, Springer
Heimann, Gerth, Popp: Mechatronik. Mnchen-Wien, 2001, Fachbuchver-
lag Leipzig
Boros Andor: Villamos mrsek a gpszetben. Budapest, 1978, Mszaki
Knyvkiad
Petrik Olivr: Finommechanika. Budapest, 1974, Mszaki Knyvkiad
Frigyes Andor et al.: Elektrotechnika. Budapest, 1961, Tanknyvkiad
Szab Imre: Gpszeti rendszertechnika. Budapest, 1983, Mszaki Knyvki-
ad
Krmn Tdor-Biot, Maurice: Matematikai mdszerek mszaki feladatok meg-
oldsra. Budapest, 1967, Mszaki Knyvkiad
Jnosi-Huba-Srkzi-Fldi: Mechatronika, SzIE, Gdll, 2006, GK
You might also like
- Elektronika IDocument201 pagesElektronika Ifeher_varjuNo ratings yet
- Az online kereskedési glosszárium: A fogalmak, amelyeket ismerni és elmélyülni kell ahhoz, hogy operatív szinten megismerkedjünk a kereskedés területévelFrom EverandAz online kereskedési glosszárium: A fogalmak, amelyeket ismerni és elmélyülni kell ahhoz, hogy operatív szinten megismerkedjünk a kereskedés területévelNo ratings yet
- Balogh Tibor - Gépszerkezettan IIIDocument207 pagesBalogh Tibor - Gépszerkezettan IIISzücs FerencNo ratings yet
- Mechanika Rezgetan PDFDocument207 pagesMechanika Rezgetan PDFErik TakácsNo ratings yet
- Objektum-Orientált Programozás (OOP) Kritikai VizsgálataDocument5 pagesObjektum-Orientált Programozás (OOP) Kritikai Vizsgálatacsetnikk21No ratings yet
- 2011-0054 Mechatronika AlapjaiDocument254 pages2011-0054 Mechatronika Alapjaibnc1No ratings yet
- Elek Tro PneumatikaDocument21 pagesElek Tro Pneumatikamarci666100% (2)
- 0029 2A CAM-tankonyvDocument664 pages0029 2A CAM-tankonyvTamas19850% (1)
- Cad AlapokDocument321 pagesCad AlapokAntal GálNo ratings yet
- Dr. Dalmi István-Automatika Alapjai PDFDocument60 pagesDr. Dalmi István-Automatika Alapjai PDFvacsaaNo ratings yet
- Automatizalas Es EnergiaelosztasDocument564 pagesAutomatizalas Es Energiaelosztasmarci666100% (1)
- Csík Norbert - Elektronika Alapjai IIDocument22 pagesCsík Norbert - Elektronika Alapjai IINorbert SzilágyiNo ratings yet
- Villamos HálózatokDocument184 pagesVillamos HálózatokPHAERDINANDVSNo ratings yet
- Gépelemek II.Document133 pagesGépelemek II.vukeroNo ratings yet
- Iranyitastechnika JegyzetDocument67 pagesIranyitastechnika JegyzetDzsoki JúingNo ratings yet
- Mechatronikai Rendszerek11Document52 pagesMechatronikai Rendszerek11Antal GálNo ratings yet
- Thodory Csaba - Feszültség, Áramerősség, Ellenállás Mérése - Okj ModulDocument31 pagesThodory Csaba - Feszültség, Áramerősség, Ellenállás Mérése - Okj ModulSzabó József100% (1)
- Aramutes Elleni VedelemDocument58 pagesAramutes Elleni Vedelemvfeco75No ratings yet
- Balázs László - AutomatikaDocument102 pagesBalázs László - AutomatikaSzücs FerencNo ratings yet
- Nagy Geza - Gepszerkesztesi AtlaszDocument366 pagesNagy Geza - Gepszerkesztesi AtlaszPhilip Smith100% (7)
- Hegedűs József - Programozás Létradiagramos Programozási Nyelven (2010, 67 Oldal)Document67 pagesHegedűs József - Programozás Létradiagramos Programozási Nyelven (2010, 67 Oldal)audiograbberNo ratings yet
- Ipari Robotika Kézikonyv 2018Document70 pagesIpari Robotika Kézikonyv 2018Zoltan SzilagyiNo ratings yet
- 2013-0002 Szakmodszertani Ismeretek Villamos Szakmacsoportos Mernokok SzamaraDocument36 pages2013-0002 Szakmodszertani Ismeretek Villamos Szakmacsoportos Mernokok Szamaramikloska0% (1)
- Villamos GepekDocument148 pagesVillamos GepeksendflowersNo ratings yet
- Forgacsolasi TervDocument144 pagesForgacsolasi TervsendilakNo ratings yet
- TMP 942 ADocument122 pagesTMP 942 ARadu DelaAfumatiNo ratings yet
- Ipari Robot ProgramozásDocument52 pagesIpari Robot ProgramozásZoltan SzilagyiNo ratings yet
- SZERKEZET-TECHNOLÓGIA - Oktatási Segédlet PDFDocument100 pagesSZERKEZET-TECHNOLÓGIA - Oktatási Segédlet PDFTímea KovácsNo ratings yet
- Arduino ProgramozásDocument27 pagesArduino ProgramozásRuzsinszki Gábor86% (7)
- Villanymotorok A GyakorlatbanDocument80 pagesVillanymotorok A GyakorlatbanTozser JozsefNo ratings yet
- CNC Techn. Es - ProgramozasDocument220 pagesCNC Techn. Es - ProgramozasElectro ScottNo ratings yet
- CNC-programozás Alapjai - Czéh Mihály Hervay Péter Nagy P SándorDocument41 pagesCNC-programozás Alapjai - Czéh Mihály Hervay Péter Nagy P Sándorbuxbuxbux100% (2)
- SZILÁRDSÁGTAN - Egyszerű IgénybevételekDocument10 pagesSZILÁRDSÁGTAN - Egyszerű IgénybevételekAntal GálNo ratings yet
- Schneider Oktató - Zárlati ÁramszámításDocument36 pagesSchneider Oktató - Zárlati Áramszámítászoltán_gunda50% (2)
- Szabó Géza - Elektrotechnika - Elektronika PDFDocument291 pagesSzabó Géza - Elektrotechnika - Elektronika PDFandykaa100% (1)
- Zalotay Peter Programozhato Iranyitasok IIDocument78 pagesZalotay Peter Programozhato Iranyitasok IIAlex DavidNo ratings yet
- Épületvillamossági KézikönyvDocument391 pagesÉpületvillamossági Kézikönyvpacisoft100% (3)
- Köszörülés TananyagDocument33 pagesKöszörülés Tananyagzs_920769432100% (1)
- Elektronika III.Document93 pagesElektronika III.Muntyán Gábor100% (1)
- Fémtan PDFDocument158 pagesFémtan PDFBalog ViktorNo ratings yet
- Hidraulika, Pneumatika BetekintőDocument19 pagesHidraulika, Pneumatika BetekintőFrank PentangeliNo ratings yet
- CAD Tankönyv PDFDocument321 pagesCAD Tankönyv PDFRéger-Blaskó IrénNo ratings yet
- VillszerDocument43 pagesVillszerdzsumbarlakNo ratings yet
- Műszaki Rajz Készítés És OlvasásDocument26 pagesMűszaki Rajz Készítés És OlvasásRoland Horváth100% (1)
- Anyagismeret PDFDocument240 pagesAnyagismeret PDFUroborosz100% (1)
- Elektro MagyarázatDocument47 pagesElektro MagyarázatLászló TomolákNo ratings yet
- Anyagismeret Es MegmunkalasDocument33 pagesAnyagismeret Es MegmunkalasGábor HorváthNo ratings yet
- Horvath Peter A Mechatronika Alapjai PDFDocument164 pagesHorvath Peter A Mechatronika Alapjai PDFGábor MalomsokiNo ratings yet
- DR - Hodossy - Laszlo - Elektrotechnika 2006 Egyben 313 OldalDocument313 pagesDR - Hodossy - Laszlo - Elektrotechnika 2006 Egyben 313 OldalEmilNo ratings yet
- Horváth Péter A Mechatronika Alapjai 2Document173 pagesHorváth Péter A Mechatronika Alapjai 2Dzsoki JúingNo ratings yet
- Hodossy Laszlo Programozott Vezerlesek PDFDocument121 pagesHodossy Laszlo Programozott Vezerlesek PDFbundzsyNo ratings yet
- Bendekovits Kóbor Pintér Gépipari AutomatizálásDocument220 pagesBendekovits Kóbor Pintér Gépipari AutomatizálásDzsoki JúingNo ratings yet
- Pukluss Elektronika GepeszmernokoknekDocument176 pagesPukluss Elektronika GepeszmernokoknekflasnicugNo ratings yet
- Konecsny Ferenc Számítógépes FolyamatirányításDocument157 pagesKonecsny Ferenc Számítógépes FolyamatirányításDzsoki JúingNo ratings yet
- Szakértői RendszerekDocument151 pagesSzakértői RendszerekArnold FehérváriNo ratings yet
- Egert János-Nagy Zoltán-Mechanika-Mozgástan PDFDocument226 pagesEgert János-Nagy Zoltán-Mechanika-Mozgástan PDFviko13No ratings yet
- Standeisky István - VillamosságtanDocument135 pagesStandeisky István - VillamosságtanvacsaaNo ratings yet
- Jhőág1 - SGY - A4 9.0Document61 pagesJhőág1 - SGY - A4 9.0Balázs FöldesNo ratings yet
- Mechanika III Dinamika PDFDocument88 pagesMechanika III Dinamika PDFsile15100% (1)
- Gepszerkezettan II GepelemekDocument252 pagesGepszerkezettan II GepelemeknrichardlNo ratings yet
- Kommunikacios TervDocument13 pagesKommunikacios TervnrichardlNo ratings yet
- Digitalis Fotos Konyv III.Document131 pagesDigitalis Fotos Konyv III.Robert PatrunaNo ratings yet
- Proje K Tter VezesDocument10 pagesProje K Tter VezesnrichardlNo ratings yet
- Scott Kelby - A Digitalis Fotos Konyv 1Document230 pagesScott Kelby - A Digitalis Fotos Konyv 1Thea Medea HormayNo ratings yet
- Kommunikacios TervDocument39 pagesKommunikacios TervnrichardlNo ratings yet
- Általanos GeptanDocument172 pagesÁltalanos GeptanSzila SiakNo ratings yet
- Kommunikációs Terv - TervezetDocument22 pagesKommunikációs Terv - TervezetnrichardlNo ratings yet
- Scott Kelby - A Digitalis Fotos Konyv 2.Document117 pagesScott Kelby - A Digitalis Fotos Konyv 2.Thea Medea Hormay100% (1)
- Bajczi Tünde-Orzói ZsuzsannaDocument106 pagesBajczi Tünde-Orzói Zsuzsannadagi83100% (4)
- Vonzatos IGékDocument16 pagesVonzatos IGékChristian WoNo ratings yet
- Mecha NikaDocument120 pagesMecha NikanrichardlNo ratings yet
- Angol Rendhagyó IgékDocument8 pagesAngol Rendhagyó IgékAmaziszNo ratings yet
- Sikerkalauz 1Document311 pagesSikerkalauz 1Fuccaro Ildiko97% (37)
- Dohar Peter-Kis Angol NyelvtanDocument141 pagesDohar Peter-Kis Angol Nyelvtanatek1965100% (3)
- OkthaszangolkifejezesDocument3 pagesOkthaszangolkifejezesBenjámin MontskóNo ratings yet
- Scott Kelby - A Digitalis Fotos Konyv 1Document230 pagesScott Kelby - A Digitalis Fotos Konyv 1Thea Medea HormayNo ratings yet
- 365 Nap Napoleon Hill Gondolataival-Bit-Book PDFDocument87 pages365 Nap Napoleon Hill Gondolataival-Bit-Book PDFNagy PepeNo ratings yet
- Némethné DR Hock Ildikó - 1000 Kérdés 1000 Válasz - CompressedDocument176 pagesNémethné DR Hock Ildikó - 1000 Kérdés 1000 Válasz - CompressedNémethnéRévészAndrea100% (1)
- Dr. Dezső Zsigmondné - A Gyorsolvasás Programozott TankönyveDocument348 pagesDr. Dezső Zsigmondné - A Gyorsolvasás Programozott TankönyveF_DIAPAZON100% (5)
- Adobe Photoshop CS - Tips and TricksDocument56 pagesAdobe Photoshop CS - Tips and TricksIstván TaubertNo ratings yet