Professional Documents
Culture Documents
HAMECHA Samira Ep-BOUREKACHE PDF
Uploaded by
ibtissamatOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
HAMECHA Samira Ep-BOUREKACHE PDF
Uploaded by
ibtissamatCopyright:
Available Formats
Ministre de lEnseignement Suprieur et de la Recherche Scientifique
Universit Mouloud Mammeri de Tizi-Ouzou
Facult de Gnie Electrique et dInformatique
Dpartement dElectrotechnique
Mmoire de Magister
Prsent par :
Mme HAMECHA Samira, Ep.BOUREKACHE
Ingnieur dEtat en Electrotechnique
Thme :
Etude et Commande dune Eolienne base dune Machine
Synchrone Aimants Permanents
Devant le jury dexamen compos de :
M
r
BENAMROUCHE Nacerddine Professeur UMMTO Prsident
M
r
MANSOURI Rachid Matre de confrences classe A UMMTO Rapporteur
M
r
HADDAD Salah Professeur UMMTO Examinateur
M
r
OTMANE CHERIF Tahar Matre de confrences classe A UMMTO Examinateur
M
r
SEDDIKI Hamid Matre de confrences classe A UMMTO Examinateur
Soutenu le : 25/06/2013
exxv|xx exxv|xx exxv|xx exxv|xx
Cest un agrable plaisir pour moi dexprimer mes remerciements Monsieur
MANSOURI Rachid (Maitre assistant habilit diriger des recherches au Dpartement
dElectrotechnique lUMMTO) qui, en acceptant de diriger ce travail de recherche ma fait
profiter de ses connaissances et ses prcieux conseils. Je le remercie galement pour ses
qualits humaines et de mavoir supporte (dans tous les sens du terme) pendant la dure de
ce travail.
Mes vifs remerciements vont galement Messieurs
BENAMROUCHE Nacerddine,
Professeur lUMMTO) pour avoir accept de me faire lhonneur de prsider le jury
dexamen.
Je suis galement profondment reconnaissante envers Monsieur HADDAD Salah
(Professeur lUMMTO) pour les conseils judicieux et clairs quil ma prodigu pour
llaboration de ce travail. Je suis particulirement sensible au grand honneur quil ma
accord en acceptant de faire partie du jury.
Je tiens remercier galement pour avoir accept de juger ce travail :
Monsieur OTMANE CHERIF Tahar, Professeur lUMMTO.
Monsieur SEDDIKI Hamid, Professeur lUMMTO.
Ww|vtvx Ww|vtvx Ww|vtvx Ww|vtvx
Vx tt| tt }tt| |ux t t fxx ^t{|t
| x t }tt| tv{x wt x x w|yy|v|xA
Tvvxx t t ztwx zt|wx x x |vx
xxv|xxA
Notation Notation Notation Notations ss s
MSAP Machine synchrone aimants permanents
Vitesse du vent en amont de l'arognrateur
Vitesse du vent en aval de l'arognrateur
Vitesse du vent traversant le rotor
Masse d'air en mouvement
S surface S des pales
Densit de lair temprature ambiante de 15
Puissance mcanique extraite du vent
Puissance thorique
Coefficient de puissance de lolienne
Vitesse relative ou ratio de vitesse
Vitesse de rotation avant multiplicateur
R Rayon de l'arognrateur
Vitesse du vent laquelle peut dmarrer lolienne
Vitesse de rotation de la turbine
A Valeur moyenne du vent
Amplitude de lharmonique de lordre k
Pulsation de lharmonique de lordre k
i Rang du dernier harmonique retenu dans le calcul du
profil du vent
Coefficient dinertie dune pale par rapport au support
de lolienne
Coefficient dlasticit de la pale
Coefficient de frottement par rapport lair
Coefficient de frottement par rapport au support
Notation Notation Notation Notations ss s
J
Inertie de larbre de la turbine
Elasticit de larbre
coefficient de frottement par rapport au multiplicateur
Coefficient de frottement par rapport lair
Forces de pousse
Couple entranant fourni par la gnratrice
Inertie de larbre dentranement des pales
Elasticit de larbre
coefficient de frottement par rapport au multiplicateur
Inertie du rotor de la gnratrice
coefficient de frottement
Couple arodynamique
Couple rsistant d aux frottements visqueux
Coefficient de frottements visqueux dans la machine
Puissance olienne
Vitesse relative de la turbine
Vitesse du vent
couple lectromagntique
pulsation propre
facteur damortissement
Coefficient proportionnel du rgulateur
Valeur crte du flux cr par laimant permanent
travers les enroulements statoriques.
,,
Vecteurs flux statorique des phases a,b et c
,,
Tensions des phases statoriques
Notation Notation Notation Notations ss s
Rsistance dune phase denroulement statorique
Transformation de Park
Transformation inverse de Park
,,
Courants des phases statoriques
Vitesse de la turbine
,
Tension statorique sur les axes d et q
,
Courant statorique sur les axes d et q
linductance statorique sur laxe d
linductance statorique sur laxe q
Coefficient du couple
,
f.e.m de la machine sur les axes d et q
,
Flux statoriques sur les axes d et q
Constante de temps lectrique
Gain statique
Onde modulante
Amplitude de la modulante
Frquence de la modulante
Onde porteuse
Frquence de la porteuse
Amplitude de la porteuse
S Fonction dfinissant ltat dun interrupteur du
redresseur
Tension redresse
,,
courants dentre
Tensions dentre entre phases du redresseur MLI
,
Fonction dtat dun interrupteur suivant les axes d et q
Notation Notation Notation Notations ss s
Courant du bus continu
Valeur de la tension linstant initial t=0
tensions composes entre phases
Fonction dfinissant ltat dun interrupteur de
londuleur MLI
Sommair Sommair Sommair Sommaire e e e
n
Introduction gnrale...
01
Chapitre I : Gnralits sur lnergie olienne
I.1. Introduction.
04
I.2. Contexte actuel 04
I.3. Diffrents types doliennes et leurs utilisations..
06
I.3.1. Machines axe vertical .
05
I.3.2. Machines axe horizontal..
09
I.4. Conversion de lnergie olienne en nergie lectrique.
12
I.4.1. Lois fondamentales rgissant la conversion de lnergie cintique du
vent en nergie mcanique...
12
I.4.2. Contraintes mcaniques associes la conversion dnergie..
17
I.5. Modes dexploitation de lnergie olienne
18
I.5.1. Les systmes vitesse fixe
18
I.5.2. Les systmes vitesse variable..
19
I.6. Optimisation de lnergie extraite
20
I.7. Diffrents systmes utiliss pour lexploitation de lnergie
olienne
21
I.7.1. Systmes utilisant la machine asynchrone 21
I.7.2. Systmes utilisant la machine synchrone
Conclusion.
23
Chapitre II : Modlisation de la turbine olienne
II.1. Introduction... 25
II.2. Modlisation du vent
25
II.3. Modlisation de la turbine olienne
26
II.3.1. Hypothses simplificatrices pour la modlisation mcanique de la
turbine
26
Sommair Sommair Sommair Sommaire e e e
n
II.3.2. Modlisation de la turbine tudier..
28
II.3.3. Equation dynamique de larbre.
29
II.4. Maximisation de la puissance avec asservissement de la vitesse...
30
II.5. Dtermination de la vitesse de rfrence.
31
II.6. Synthse des rgulateurs
32
II.6.1. Calcul des paramtres du rgulateur de vitesse PI
32
II.6.2. Calcul des paramtres du rgulateur de vitesse IP
33
II.7. Rsultats de la simulation.
34
II.7.1. Rsultats de simulation avec le rgulateur PI
35
II.7.2. Rsultats de simulation avec le rgulateur IP.
37
Conclusion.
39
Chapitre III: Modlisation de la machine synchrone aimants permanents
III.1. Introduction
40
III.2. Description..
40
III.3. Principe de fonctionnement dune gnratrice synchrone..
43
III.4. Avantages de la machine synchrone aimants permanents ..
43
III.5. Synchronisation des alternateurs...
44
III.6. Modlisation de la machine synchrone aimants permanents...
44
III.6.1. Hypothses simplificatrices.
44
III.6.2. Equations de la machine synchrone aimants permanents
44
III.6.3. Equations de la machine synchrone aimants permanents dans le
plan de Park.
45
III.6.4. Expression du couple lectromagntique
46
III.7. Commande vectorielle de la MSAP..
47
III.8. Commande vectorielle avec dcouplage de la rgulation des courants par
compensation...
47
Sommair Sommair Sommair Sommaire e e e
n
III.9. Calcul du rgulateur PI .
49
III.10. Rsultats de simulation.
50
Conclusion.
53
Chapitre IV : Commande de la puissance active et ractive
IV.1. Introduction..
54
IV.2. Stratgie de contrle.
54
IV.3. Rgulation des puissances 55
VI.3.1. La puissance active est maintenue constante 57
VI.3.2. La puissance active varie avec le vent 61
VI.3.3. La puissance active varie suivant le besoin de lutilisation 65
VI.3.4. La puissance ractive est diffrente de zro
67
Conclusion.
69
Chapitre V : Modlisation et commande des convertisseurs statiques
V.1. Introduction
70
V.2. La commande MLI
71
V.3. Modle du redresseur MLI..
72
V.4. Modlisation du bus continu.
73
V.5. Calcul de la tension du bus continu 75
V.6. Modlisation de londuleur
75
V.6. Rsultats de simulation.. 78
V.8 Contrle de la liaison au rseau 81
a. Contrle des courants par la commande du convertisseur de puissance
b. Contrle des courants envoys au rseau
81
82
c . Rgulation des puissances 83
Conclusion. 86
Conclusion gnrale. 87
Sommair Sommair Sommair Sommaire e e e
n
Bibliographie.
Paramtres de la chaine de conversion olienne.
Introduction Gnrale Introduction Gnrale Introduction Gnrale Introduction Gnrale
Introduction gnrale Introduction gnrale Introduction gnrale Introduction gnrale
1
Depuis les anciennes civilisations, lHomme a dcouvert la notion de la force et il a
compris quil peut puiser dans la nature pour sen procurer afin de prosprer sur terre, et
dompter les obstacles quil rencontre dans sa dmarche quotidienne vers le progrs. Une de
ces forces de la nature est le vent qui est appele actuellement lnergie olienne.
LHomme a trs vite compris la manire de capter cette nergie et comment lexploiter
dans des systmes simples pour moudre les grains o pomper leau. On trouve dailleurs des
anctres doliennes jusque dans la perce ancienne [1]. Mais il ne la utilise comme source
dnergie lectrique que vers les annes quarante du sicle pass. Car jusqualors llectricit
tait produite partir des nergies fossiles, du gothermique et de lhydraulique. Arriva
ensuite le nuclaire pour remplacer les ressources traditionnelles dj en puisement avec un
rendement trs important mais des dchets radioactifs trs dangereux, et surtout des risques
nfastes pour lenvironnement et les personnes en cas daccident ou de sisme ou mme
dattaque sur les sites concerns.
Avec laugmentation de la pollution cause de lindustrialisation croissante de la
majorit des pays, et la surpopulation sur lensemble du globe, la demande sur lnergie
lectrique est de plus en plus croissante et les sources dnergie traditionnelles de moins en
moins abondantes. LHomme sest alors orient vers des nergies renouvelables mais surtout
propres et sans danger.
De nos jours les efforts sorientent tous vers le dveloppement de la production de
lnergie solaire et olienne soit caractre local soit pour la production grande chelle,
suivant le potentiel du site exploit. Du fait de labondance de ces ressources et de leur
caractre cologique (aucune mission de gaz ni dchets), elles sont considres comme tant
les nergies de lavenir. Dans ce contexte notre travail va sintresser la filire olienne et
aux outils de son exploitation et son dveloppement.
La majorit des oliennes installes taient vitesse fixe. Elles possdent nanmoins de
nombreux inconvnients : un faible rendement nergtique, dans la mesure o elles ne sont
optimises que pour un point de fonctionnement et une courte dure de vie cause des efforts
importants subis par leur structure. En outre, ces turbines gnrent des fluctuations
considrables de la tension et de la puissance du rseau lors des rafales du vent [2].
Les oliennes vitesse variable ont t alors introduites pour apporter des solutions ces
problmes. Les fluctuations de puissance peuvent tre attnues avec un dispositif qui permet
des vitesses de rotation variables et par consquent demmagasiner lnergie des rafales sous
forme dnergie cintique dans les grandes masses tournantes. Ainsi la production annuelle
Introduction gnrale Introduction gnrale Introduction gnrale Introduction gnrale
2
dune olienne vitesse variable est accrue de 5% 10% par rapport une olienne vitesse
fixe [3].
Parmi diffrents types de structures oliennes, la gnratrice synchrone aimants
permanents grand nombre de ples, rend les systmes vitesse variables plus attractifs. Ce
type de machines permet dextraire un maximum dnergie en rduisant les contraintes
mcaniques et cela par llimination du multiplicateur de vitesse, ce qui amliore la fiabilit
du systme et la rduction des frais dentretien. Contrairement la machine asynchrone
double alimentation qui ncessite un multiplicateur mcanique [4].
La machine synchrone aimants permanents est galement caractrise par un couple
volumique lev, une inertie trs faible et de faibles inductances. Toutes ces caractristiques
offrent la machine synchrone aimants permanents des performances intressantes, un
rendement meilleur et meilleur contrlabilit, ce qui fait delle une srieuse concurrente de la
machine asynchrone [4].
Dans ce travail, nous allons nous intresser ltude dune chaine complte de
conversion dnergie olienne base sur une gnratrice synchrone aimants permanents
attaque directe. Nous allons galement tudier des stratgies de commande permettant
loptimisation de lnergie extraite par la turbine ainsi que des contrleurs permettant de
commander la puissance lectrique fournie au rseau.
Nous allons entamer ce travail avec un premier chapitre qui traitera des gnralits sur
lnergie olienne, commencer par quelques statistiques sur la production mondiale et la
production des pays considrs comme de grands producteurs, sans oublier de parler du cas
Algrien. Puis nous allons parler des diffrents types doliennes existant en abordant leurs
diffrentes structures, leurs fonctionnements, leurs qualits et ventuellement leurs dfauts.
Ensuite, nous allons donner quelques notions thoriques sur les calculs de base qui permettent
de contrler le fonctionnement de notre systme par la suite. Nous allons galement citer
quelques structures composant la turbine olienne associe sa gnratrice et ces annexes.
En fin, nous allons particulirement nous intresser lutilisation de la machine synchrone
aimants permanents qui est lobjet de notre tude, et toute la structure associe.
Dans le chapitre deux, nous allons commencer par la modlisation du vent qui est la
source principale dnergie. Ce qui nous permettra didentifier le profil du vent qui sera utilis
dans le reste du travail. Nous allons ensuite modliser la turbine olienne sur laquelle se base
notre tude. Cette modlisation va permettre de commander la turbine de sorte ce que le
coefficient de puissance soit toujours optimal quelques soient les variations du vent. Nous
allons faire le contrle une fois avec un rgulateur Proportionnel Intgral puis avec un
Introduction gnrale Introduction gnrale Introduction gnrale Introduction gnrale
3
rgulateur Intgral Proportionnel afin de voire lefficacit de chacun pour remdier leffet
des perturbations dues au vent lui-mme. Quelques rsultats de simulation seront ensuite
donns.
Aprs avoir modlis la turbine vient le tour de la gnratrice aimants permanents, qui
fait lobjet du chapitre trois. Nous allons donner quelques gnralits sur la machine
synchrone et notamment la machine synchrone aimants permanents. Nous allons ensuite
donner des exemples sur des machines diffrentes du point de vue structurel. Puis nous allons
passer aux quations mathmatiques et aux calculs permettant de modliser la machine de
notre choix, et de modliser sa commande vectorielle.
Pour ce qui est du chapitre quatre, nous allons aborder le problme li la puissance
lectrique produite par la gnratrice grce son entrainement par la force du vent. Cette
puissance est compose dune composante active qui est utile pour faire fonctionner une
ventuelle charge, et dune composante ractive qui en gnral devrait tre nul afin davoir un
facteur de puissance gale lunit. Sauf que la gnratrice fournie des puissances active et
ractive qui dpendent du vent qui est en mme temps la grandeur dentre et llment
perturbateur. Un control des puissances simpose alors suivant les objectifs recherchs. Dans
un premier temps nous allons faire un contrle de la puissance ractive o nous allons
imposer une rfrence nulle, puis nous allons voire si notre contrleur peut donner des
rsultats satisfaisants si la puissance de rfrence tait non nulle. Puis dans un deuxime mps,
nous allons effectuer la rgulation de la puissance active en imposant dabord une rfrence
constante et gale la valeur nominale que peut fournir notre machine. Puis nous allons
gnrer une puissance de rfrence variable. Nous allons utiliser pour cela le mme type de
rgulateurs que pour le chapitre prcdent.
Nous allons ensuite passer la phase de rcupration de lnergie lectrique produite.
Mais nous nallons pas alimenter directement une charge avant de faire un travail dadaptation
sur les tensions rcupres afin quelles soient compatibles avec la charge alimenter. Cest
pourquoi nous allons dabord redresser les tensions des trois phases grce un redresseur
MLI, puis filtrer la tension de sortie pour la dbarrasser des signaux parasites dus au
redressement, avant de londuler grce un onduleur MLI. Cette opration permet dobtenir
un systme de tensions triphas de la frquence dsire.
Chapitre I Chapitre I Chapitre I Chapitre I
Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
4
I.1.Introduction
Lutilisation de la force du vent pour suppler lnergie humaine ou animale nest pas
nouvelle. On peut ainsi trouver la trace danctres des oliennes modernes jusque dans la
Perse ancienne. Plus prs de nous, certains pays ont, depuis le Moyen ge, largement fait
usage de ce type dnergie par le biais des moulins vent (moulins hollandais) ou des o-
liennes dites amricaines. Au cours des sicles, la technologie des moulins a volu grce
lapparition de toits orientables permettant une utilisation plus intensive, puis de moulins
complets monts sur pivot. Enfin, la dernire volution marquante a t ladoption de profils
semblables des ailes davion, en lieu et place de la toile tendue sur une structure en bois, du
fait de la comprhension des phnomnes arodynamiques, acoustiques et arolastiques im-
pliqus. Paralllement, les progrs technologiques, tant dans les domaines de
llectrotechnique, de llectronique que dans celui des matriaux, font que lon peut dsor-
mais disposer de machines aux performances tonnantes en terme de puissance produite, tout
en limitant les impacts sur lenvironnement [5].
Mais la motivation principale derrire lintrt croissant envers cette source dnergie re-
nouvelable est son caractre cologique, surtout dans le contexte actuel o la terre entire su-
bit les consquences du rchauffement climatique qui puise les rserves mondiales en eau,
principale source de lnergie lectrique. Sajoute cela limpacte de la crise conomique
mondiale actuelle sur la capacit des pays industrialiss faire face la demande croissante
en nergie lectrique, vu le cot de sa production pour les pays producteurs, et le prix de
limportation pour les pays non producteurs [6].
I.2. Contexte actuel
Bien que ne pouvant envisager de remplacer totalement les sources traditionnelles
dnergie, lolien peut toutefois proposer une alternative intressante et renouvelable. Elle
sinscrit parfaitement dans leffort global de rduction des missions de gaz effet de serre.
Son dveloppement sest fortement acclr depuis 1995 avec une progression moyenne
de 20 % par an dans le monde. Cette progression saccompagne par une volution de la fiabi-
lit, de la taille des oliennes et de leur rendement. Le cot de production du kilowattheure a
progressivement baiss pour atteindre un niveau comptitif par rapport aux autres sources
dnergie [7].
Au dbut de lanne 2009, on estimait prs de 121 GW la puissance totale installe de
lensemble des oliennes travers le monde. Le pays possdant la plus grande puissance
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
5
olienne installe tait les tats-Unis (25 388 MW) suivi de lAllemagne (23 903 MW) et de
lEspagne (16 740 MW).
En puissance olienne installe par habitant, le Danemark arrive en tte (600 W par habi-
tant). Les tats-Unis arrivaient en 12
e
position (89 W/hab) malgr leur classement en pre-
mire position pour la production totale.
A la fin de lanne 2010, 193 GW d'olien sont installs dans le monde. La Chine y a in-
vesti 63 milliards de dollars et les USA 18 milliards de dollars. La croissance des investisse-
ments dans l'olien a t de 34%. Quand la puissance, elle a augment de 22% (soit 35,8
GW) [8].
LAlgrie linstar des autres pays essaye de percer dans le domaine des nergies renou-
velables et lnergie olienne en particulier, et ce en donnant beaucoup dimportance aux
tudes ralises dans ce domaine notamment celles qui sont ddies au cas Algrien malgr la
prdominance de lnergie solaire. Une tude prliminaire de l'volution saisonnire et an-
nuelle de la vitesse moyenne du vent a permis de faire une premire identification des rgions
ventes de l'Algrie. Cette reprsentation de la vitesse sous forme de carte, a deux objectifs :
le premier est d'identifier les vastes rgions avec de bonnes promesses d'exploitation de
l'nergie olienne. Le second est de mettre en vidence la variation relative de la ressource
travers le pays [9].
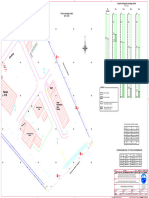
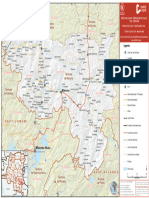
La carte reprsente en figure I.1 montre que le Sud est caractris par des vitesses plus
leves que le Nord, plus particulirement le Sud-Ouest avec des vitesses suprieures 4 m/s
et qui dpassent la valeur de 6 m/s dans la rgion d'Adrar. Concernant le Nord, on remarque
globalement que la vitesse moyenne est peu leve. On note cependant, l'existence de micro-
climats sur les sites ctiers dOran, Bjaia et Annaba, sur les hauts plateaux de Tiaret et El
Kheiter ainsi que dans la rgion dlimite par Bejaia au Nord et Biskra au sud. Toutefois, la
vitesse du vent subit des variations en fonction des saisons qu'on ne doit pas ngliger, en par-
ticulier, lorsqu'il s'agit d'installer des systmes de conversion de l'nergie olienne. La ralisa
tion dune carte saisonnire a montr clairement que l'automne et l'hiver sont moins ventes
que le reste des saisons et que le printemps en est la plus vente. Nanmoins, il faut remarquer
que la rgion de Tiaret fait l'exception avec une vitesse plus faible en t qu'en hiver. D'un
autre ct, des rgions telles que Biskra, Adrar et Annaba sont caractriss par une vitesse
relativement constante tout au long de l'anne [9].
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
6
Figure I.1 : Carte du potentiel olien en Algrie [9]
Cette carte permet de cibler les zones les mieux ventes pour installer des parcs oliens en
vue dalimenter des rgions isoles ou de permettre aux rgions qui baignent dans le vent
davoir une autonomie nergtique par rapport au rseau national dj trs charg. Des projets
de ce genre sont en phase de ltude et dautres commencent voire le jour tel que la ralisa-
tion de la premire ferme olienne Adrar dune puissance de 10MW par le groupe Franais
Vergnet.
I.3. Diffrents types doliennes et leurs utilisations
On classe les oliennes en deux grandes familles : les oliennes axe vertical et les o-
liennes axe horizontal [10].
I.3.1. Eoliennes axe vertical
Deux principes diffrents sont utiliss pour ce type de machines (Figure I.2), savoir la
trane diffrentielle ou la variation cyclique dincidence.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
7
Figure I.2: Exemples doliennes axe vertical [10]
I.3.1.1 Trane diffrentielle
Le principe de mise en mouvement de ce type de machines tel quil est schmatis dans la
figure I.3 est identique celui dun anmomtre : lolienne est munie de deux ples de forme
creuse, sur lesquelles des efforts dintensits diffrentes et de sens opposs sont exercs par
le vent. Il en rsulte donc un couple moteur qui fait tourner le rotor de lolienne. [11]
Figure 1.3 : Principe de la trane diffrentielle [11]
Eolienne de
kSavonius
Eolienne de
kDarrieus
Eolienne de
Musarov
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
8
I.3.1.2 Variation cyclique dincidence
Le fonctionnement est bas sur le fait quun profil plac dans un coulement dair selon
diffrents angles est soumis des forces dintensits et de directions variables (Figure 1.4).
Figure I.4 : Principe de lincidence variable [11]
Avec
: Vitesse axiale du vent en amont de lolienne, : Vitesse angulaire de rotation
des pales, R : Rayon de la pale,
: Vecteur unitaire tangent de la pale
La combinaison de ces forces gnre un couple moteur. Ce principe de fonctionnement a
t brevet au dbut des annes 1930 par le Franais Darrieus. Cependant, le fonctionnement
Intrinsque faisant appel la rotation des pales, implique que lolienne ne peut pas dmarrer
toute seule. Un systme de lancement savre donc ncessaire [11].
Le principal avantage des machines axe vertical est que le dispositif de gnration lec-
trique repose sur le sol, ne ncessitant donc pas ldification dune tour. Par ailleurs, elle fonc-
tionne quelle que soit la direction do souffle le vent, permettant donc de saffranchir dun
dispositif dorientation de la machine.
En revanche, le fait quune telle olienne soit rige prs du sol signifie que le capteur
dnergie se situe dans une zone peu favorable (gradient de vent, turbulence due aux accidents
du terrain en amont de la machine), ce qui rduit significativement lefficacit de la machine.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
9
I.3.2 Eoliennes axe horizontal
Ces machines sont les descendantes directes des moulins vent. Ces machines prsentent
gnralement un nombre de pales compris entre 1 et 3 et peuvent dvelopper des puissances
leves (plusieurs mgawatts). Deux types de configuration peuvent tre rencontrs : les o-
liennes amont , sur lesquelles les pales sont situes du ct de la tour expos au vent, et
inversement, les oliennes aval .
Chaque configuration possde des avantages et des inconvnients : la formule amont
requiert des pales rigides pour viter tout risque de collision avec la tour alors que la configu-
ration aval autorise lutilisation de rotors plus flexibles. Par ailleurs, dans le cas dune ma-
chine amont, lcoulement de lair sur les pales est peu perturb par la prsence de la tour.
Leffet de masque est plus important dans le cas dune machine aval . Enfin, une machine
aval est thoriquement auto-orientable dans le lit du vent, alors quune olienne amont
doit gnralement tre oriente laide dun dispositif spcifique. On constate nanmoins que
la majeure partie des oliennes de grande puissance adoptent la configuration amont [11].
Figure I.5 : Configurations axe horizontal [11]
Eolienne amont Eolienne aval
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
10
On peut considrer trois composantes essentielles dans une olienne, le rotor, la nacelle et la
tour.
Figure I.6 : Architecture dune olienne axe horizontal [12]
Les pales
Elles sont directement exposes aux variations du vent ce qui provoque leur rotation.
Le contrle de la puissance olienne capte se fait de deux faons [13] :
Le contrle de la surface expose au vent par la mthode du PITCH, qui consiste en le
rglage de langle dexposition des pales londe incidente du vent.
Le contrle de cette surface par la mthode du STALL, qui consiste en la variation de
langle de calage de la pale ce qui mne un dcrochage arodynamique et un frei-
nage des pales.
Le Rotor
Cest la partie tournante dans une olienne. Il capte et transforme lnergie du vent en
nergie mcanique. Il est constitu des pales (dun nombre variable) et de larbre primaire, la
liaison entre ces lments tant assure par le moyeu. Sur certaines machines, larbre primaire
qui tourne faible vitesse comporte un dispositif permettant de faire passer des conduites hy-
drauliques entre la nacelle et le moyeu. Cette installation hydraulique est notamment utilise
pour la rgulation du fonctionnement de la machine (pas des pales variable, freinage du ro-
tor....)
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
11
La Nacelle
Son rle est dabriter linstallation de gnration de lnergie lectrique ainsi que ses pri-
phriques. Diffrentes configurations peuvent tre rencontres suivant le type de la machine.
Elle est constitue des composantes suivantes:
- Le multiplicateur de vitesse : Il sert lever la vitesse de rotation entre larbre pri-
maire mu par le vent, et larbre secondaire qui entrane la gnratrice lectrique. En ef-
fet, la faible vitesse de rotation de lolienne ne permettrait pas de gnrer du courant
lectrique dans de bonnes conditions avec les gnrateurs de courant classiques ;
- Larbre secondaire : Comporte gnralement un frein mcanique qui permet
dimmobiliser le rotor au cours des oprations de maintenance et dviter
lemballement de la machine ;
- La gnratrice : Cest elle qui convertit lnergie mcanique en nergie lectrique.
- Un contrleur lectronique : Charg de surveiller le fonctionnement de lolienne. Il
sagit en fait dun ordinateur qui peut grer le dmarrage de la machine lorsque la vi-
tesse du vent est suffisante (de lordre de 5 m/s), grer le pas des pales, le freinage de
la machine, lorientation de lensemble (rotor + nacelle) face au vent de manire
maximiser la rcupration dnergie. Pour mener bien ces diffrentes tches, le con-
trleur utilise les donnes fournies par un anmomtre (vitesse du vent) et une gi-
rouette (direction du vent), habituellement situs larrire de la nacelle. Enfin, le
contrleur assure galement la gestion des diffrentes pannes ventuelles pouvant sur-
venir ;
- Divers dispositifs de refroidissement : Le refroidissement des composantes situes
lintrieur de la nacelle est assure par des ventilateurs ou bien par des radiateurs
deau ou dhuile ;
- Le dispositif dorientation de la nacelle: Il permet la rotation de la nacelle autour de
laxe vertical. Lorientation est gnralement assure par des moteurs lectriques, par
lintermdiaire dune couronne dente. De nombreuses oliennes comportent un sys-
tme de blocage mcanique de la position de la nacelle suivant une orientation donne.
Cela vite de solliciter constamment les moteurs et permet aussi de bloquer lolienne
durant les oprations de maintenance. Le dispositif dorientation comprend un comp-
teur de tours de la nacelle, de manire viter de tordre inconsidrment le cble
acheminant lnergie lectrique provenant de la gnratrice jusquau pied de la tour.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
12
I.4. Conversion de lnergie olienne en nergie lectrique
La nacelle telle quelle est prsente dans la figure I.6 a pour rle de capter lnergie cin-
tique du vent et la transformer en nergie lectrique. Cette opration est base sur un certain
nombre de lois physiques qui sont prsentes dans ce qui suit.
I.4.1. Lois fondamentales rgissant la conversion de lnergie cintique du vent en
nergie mcanique :
I.4.1.1. Loi de Betz
Considrons le systme olien axe horizontal reprsent sur la Figure I.7, sur lequel on a
reprsent la vitesse du vent
en amont de l'arognrateur et la vitesse
en aval. En sup-
posant que la vitesse du vent traversant le rotor est gale la moyenne entre la vitesse du vent
non perturb l'avant de l'olienne
et la vitesse du vent aprs passage travers le rotor
,
soit
[2,13].
Figure I.7 : Tube de courant travers une olienne [2,13]
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
13
La masse d'air en mouvement de densit traversant la surface S des pales en une seconde
est:
. .
2
(I.1)
La puissance
alors extraite s'exprime par la moiti du produit de la masse et de la diminu-
tion de la vitesse du vent (seconde loi de Newton) :
2
(I.2)
Soit en remplaant m par son expression (quation I.1):
. .
4
(I.3)
Un vent thoriquement non perturb traverserait cette mme surface S sans diminution de
vitesse, soit la vitesse
, la puissance thorique
correspondante serait alors
. .
2
(I.4)
Le ratio entre la puissance extraite du vent et la puissance totale thoriquement disponible est
alors donn par :
. 1
(I.5)
La figure I.8 reprsente lvolution du ratio
en fonction de
. On s'aperoit que ce
ratio appel aussi coefficient de puissance
prsente un maxima de 16/27 soit 0,59. C'est
cette limite thorique appele limite de Betz qui fixe la puissance maximale extractible pour
une vitesse de vent donne. Cette limite n'est en ralit jamais atteinte et chaque olienne est
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
14
dfinie par son propre coefficient de puissance exprim en fonction de la vitesse relative
reprsentant le rapport entre la vitesse de l'extrmit des pales de l'olienne et la vitesse du
vent [13].
Figure I.8 : Courbe caractristique du coefficient de puissance [2]
La courbe de la figure I.8 reprsente la forme la plus rpondue du coefficient de puis-
sance et qui caractrise une olienne tripale axe horizontal. Cette forme peut, par contre
changer selon le type de lolienne ( axe horizontal ou vertical), ou bien selon le nombre de
pales comme le montre la figure I.9. Cette figure montre que pour des oliennes dont la vi-
tesse relative est comprise entre 0 et 10 appeles aussi oliennes lentes, la courbe
a
une forme en cloche plutt troite et pointue. Alors que pour des oliennes rapides et dont la
vitesse relative est comprise entre 10 et 20, la forme de cette courbe est plutt large et aplatie
au sommet [13].
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
15
Figure I.9 : Coefficient de puissance pour diffrents types doliennes [13]
I.4.1.2. Production dnergie mcanique
En combinant les quations I.1, I.4 et I.5, la puissance mcanique Pm disponible sur l'arbre
d'un arognrateur s'exprime par :
1
2
(I.6)
Avec
(I.7)
est la vitesse de rotation avant multiplicateur et R le rayon de l'arognrateur.
La relation I.7 permet d'tablir un ensemble de caractristiques donnant la puissance
disponible en fonction de la vitesse de rotation du gnrateur pour diffrentes vitesses de vent.
La figure I.10 reprsente la caractristique obtenue pour une valeur donne de la vitesse de
rotation.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
16
Figure I.10 : Courbe de la puissance olienne en fonction de la vitesse du vent [13]
Aprs une partie (A) o aucune puissance nest dlivre pour des vitesses du vent inf-
rieures la vitesse du dmarrage
, une section de fonctionnement normal existe. Si on
extrait alors la puissance maximale de la turbine (MPPT) celle ci volue alors selon le cube de
la vitesse du vent (B). Quand la puissance nominale
est atteinte, elle doit tre limite (C).
Au del dune certaine limite de vitesse du vent, la turbine doit tre arrte [13].
Il existe quatre mthodes principales pour limiter la puissance olienne dans le cas de
fortes valeurs du vent [16].
La premire est une technique active assez coteuse et complexe appele systme pas
variable pitch : elle est plutt utilise sur les systmes vitesse variable de moyenne
fortes puissances (quelques centaines de kW). Elle consiste rgler mcaniquement la posi-
tion angulaire des pales sur leur axe ce qui permet de dcaler dynamiquement la courbe du
coefficient de puissance de la voilure.
La seconde technique est passive stall . Elle consiste concevoir la forme des pales
pour obtenir un dcrochage dynamique du flux dair des pales fort rgime de vent. Il existe
aussi des combinaisons de ces deux technologies.
La troisime faon de limiter la puissance est la dviation de laxe du rotor dans le plan
vertical (un basculement de la nacelle) ou une dviation dans le plan horizontal (une rotation
autour de laxe du mat). Ainsi, la turbine nest plus face au vent et la surface active de
lolienne diminue.
La dernire mthode qui permet la rgulation de la puissance olienne consiste faire
varier la vitesse de rotation
par une action lectrique. Par le biais de la gnratrice ac-
couple une chane de conversion statique pilote pour grer le transfert dnergie, la vitesse
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
17
de rotation peut tre pilote selon le point de fonctionnement souhait. Le plus souvent, dans
les turbines classiques axe horizontal, le dispositif de rglage frquence variable est asso-
ci un rglage mcanique (pitch ou stall).
Figure 1.11 : Orientation de la nacelle en vue de la limitation de la puissance [16]
Ces diffrentes mthodes de limitation de la puissance olienne laissent croire que
la conversion de lnergie olienne telle que dcrite par les quations prcdentes est simpli-
fie du moment quon ne prend pas en considration un certain nombre de contraintes
physiques lies aux turbulences du vent, les matriaux dont larognrateur est construit et
les obstacles pouvant perturber lcoulement du ventetc.
I.4.2. Contraintes mcaniques associes la conversion de lnergie olienne
Lexpression du couple olien donne le couple moyen prsent sur larbre de la turbine
correspondant au vent quivalent moyen. Il faut, pour mieux dcrire le comportement, prendre
en compte lexistence des couples pulsatoires, qui entraineront des fluctuations de puissance,
et qui sont gnrs par les irrgularits dterministes du champ de vitesses [17].
Ces phnomnes sont dus en particulier leffet de cisaillement, leffet du passage dune
pale devant la tour (effet dombre), sans oublier dajouter galement les effets des imperfec-
tions de construction (asymtrie).
Ces diffrentes contraintes peuvent tre classes selon leur effet temporel sur le rotor et
selon le caractre dynamique de la conversion.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
18
Les contraintes lies leffet temporel :
a) Les charges stationnaires, indpendantes du temps, lorsque le rotor tourne une vi-
tesse fixe : vitesse du vent constante, forces centrifuges.
b) Les charges stationnaires dans le temps, mais pas dans lespace, qui provoquent des
contraintes cycliques sur le rotor telles que laugmentation du vent avec la hauteur et
linterfrence entre la tour et lcoulement du vent.
c) Les forces de gravit dues au poids des pales qui entrainent aussi des fluctuations
priodiques.
d) Les contraintes non priodiques et stochastiques dues aux turbulences du vent.
Les contraintes lies au caractre dynamique de la conversion :
a) Effet dombre ou effet de tour : Leffet de tour est produit du fait de la rsistance de la
turbine lcoulement du vent, perturbe en amont et en aval. Loin de l'influence de la
tour, la vitesse de vent est suppose constante alors qu'elle augmente lapproche de
la tour et diminue ensuite.
b) Phnomne de cisaillement : Le phnomne de cisaillement du vent produit galement
des oscillations de couple provoques par le gradient de vitesse du vent le long du sec-
teur balay par les pales [17].
I.5. Modes dexploitation de lnergie olienne
En vue de lexploitation de lnergie fournie par le vent, plusieurs systmes peuvent tre
utiliss. Nous pouvons les classer en deux catgories :
a) les systmes vitesse fixe
b) les systmes vitesse variable
I.5.1. Les systmes vitesse fixe
Les oliennes vitesse fixe sont les premires avoir t dveloppes. Dans cette techno-
logie, la gnratrice est directement couple au rseau. Sa vitesse mcanique est alors impose
par la frquence du rseau et par le nombre de paires de ples de la gnratrice. La technolo-
gie inhrente aux oliennes vitesse fixe est bien matrise. En effet, cest une technologie
qui a fait preuve dune simplicit dimplantation, une fiabilit et un faible cot. Cela permet
une installation rapide de centaines de kW de gnration olienne. Cependant, avec la mise en
place trs progressive de projets doliennes dont la puissance est suprieure au MW, ce sont
les oliennes vitesse variable qui se dvelopperont lavenir pour cette gamme de puis-
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
19
sance. La configuration vitesse fixe peut tre reprsente dune manire simplifie par le
schma de la figure I.12. La chaine de conversion de lnergie olienne est compose de la
turbine, le multiplicateur de vitesse et de la gnratrice [18].
Figure I.12 : olienne vitesse fixe [18]
I.5.2. Les systmes vitesse variable
Les deux structures existantes des oliennes vitesse variable sont prsentes sur la figure
I.13. La configuration de la figure I.13.a est base sur une machine asynchrone cage, pilote
au stator de manire fonctionner vitesse variable, par des convertisseurs statiques. La con-
figuration de la figure I.13.b, est base sur une machine asynchrone double alimentation et
rotor bobin. La vitesse variable est ralise par lintermdiaire des convertisseurs de puis-
sance, situs au circuit rotorique [18].
Gnratrice
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
20
Figure I.13 : Eoliennes fonctionnant vitesse variable [18]
I.6. Optimisation de lnergie extraite
Nous avons vu quil est indispensable de rguler la puissance olienne et que les courbes
caractristiques des voilures oliennes ne sont pas linaires, surtout dans le cas des voilures de
type Savonius dont la forme de cloche est trs pointue . En ce qui concerne la puissance
olienne, elle rsulte de la vitesse de rotation de larbre mcanique de lolienne et de la vi-
tesse du vent (donc de la vitesse rduite) et de la caractristique
. Elle peut tre optimi-
se dans le but de maximiser lnergie capte par lolienne.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
21
Figure I.14 : Optimisation de lnergie extraite grce la variation de la vitesse de
lolienne [14]
La Figure I.14 donne limage de la famille des courbes de la puissance olienne en fonc-
tion de la vitesse de rotation pour diffrentes vitesses du vent (pour une turbine Savonius)
ainsi que la courbe optimale qui relie leurs sommets selon une fonction cubique de la vitesse
de rotation. En suivant cette courbe continuellement, la puissance olienne recueillie sera tou-
jours maximale.
De nombreuses tudes ont montr lintrt de la vitesse variable en olien sur le plan
nergtique, y compris dans le petit olien o le surcot entran par la vitesse variable (du
fait de llectronique de puissance et de rglage supplmentaire) est compens par le surplus
de production.
Mais cest aussi et surtout sur le plan de la dure de vie des systmes que se situe
lavantage de la vitesse variable. En effet, les chanes vitesse variable sont moins raides
que les chanes vitesse fixe ou presque fixe rigidement couples au rseau : cette liaison
rigide se solde par de fortes oscillations de puissance engendres par les turbulences. Ces
variations sont la longue nuisibles pour les lments mcaniques : la vitesse variable, elle,
permet de mieux lisser la production travers lnorme moment dinertie que constitue la
voilure.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
22
I.7. Diffrents systmes utiliss pour lexploitation de lnergie olienne
I.7.1. Systmes utilisant la machine asynchrone
Contrairement aux autres moyens traditionnels de production d'nergie lectrique o
l'alternateur synchrone est largement utilis, c'est la gnratrice asynchrone cage d'cureuil
qui quipe actuellement une grande partie des oliennes installes dans le monde.
La robustesse et le faible cot ainsi que l'absence de balais-collecteurs ou de contacts
glissants sur les bagues la rendent tout fait approprie pour l'utilisation dans les conditions
parfois extrmes que prsente l'nergie olienne.
Il existe plusieurs types de configurations utilisant la machine asynchrone dans toutes ses
formes (Machine asynchrone rotor bobin, Machine asynchrone cage, Machine asyn-
chrone double stator, MADAetc) [14].
I.7.2. Systmes utilisant la machine synchrone
Malgr toutes les caractristiques et avantages des machines asynchrones, ces dernires
prsentent le dfaut dimposer la prsence du multiplicateur de vitesse car elles possdent un
couple mcanique insuffisant pour un couplage mcanique directe aux pales. Par contre les
machines synchrones sont connues pour fournir un couple important, dimensions gom-
triques convenables. Cest pourquoi elles offrent lavantage de se passer du multiplicateur de
vitesse, notamment si le nombre de ples est important [14].
Dans une machine synchrone classique utilise en alternateur le champ cr par la
rotation du rotor doit tourner la mme vitesse que le champs statorique. Ainsi, si l'alterna-
teur est connect au rseau, sa vitesse de rotation doit tre rigoureusement un sous-multiple de
la pulsation des courants statoriques.
L'adaptation de cette machine un systme olien pose des problmes pour maintenir la
vitesse de rotation de l'olienne strictement fixe et pour synchroniser la machine avec le r-
seau lors des phases de connexion.
Pour ces raisons, on place systmatiquement une interface d'lectronique de puissance
entre le stator de la machine et le rseau (Figure I.16) ce qui permet d'autoriser un fonction-
nement vitesse variable dans une large plage de variation.
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
23
Figure I.16 : Machine synchrone entraine par une turbine olienne et relie au rseau
par un dispositif redresseur MLI onduleur MLI
Dans le cas de la machine rotor bobin, le champ tournant rotorique est cr par un bobi-
nage aliment en courant continu (roue polaire) par l'intermdiaire d'un redresseur connect
au rseau. Ce mode d'excitation entrane la prsence de contacts glissants au rotor, c'est pour-
quoi on le remplace souvent par des aimants permanents. Toutefois, certains d'entre eux sont
raliss l'aide de terres rares et sont par consquent trs coteux, bien que leur utilisation de
plus en plus frquente tende faire baisser leur prix. De plus, les variations importantes de
couple lectromagntique qui peuvent avoir lieu dans un systme olien risquent d'entraner
une dmagntisation des aimants lorsqu'ils sont constitus de matriaux classiques. Ceci
contribue largement la diminution de la dure de vie de la connexion d'une machine syn-
chrone au rseau [14].
La liaison avec le rseau se fait via un convertisseur connect au stator de la machine.
Cest un simple redresseur puisqu'elle n'absorbe pas de puissance ractive, ce qui permet
d'viter les variations importantes de la tension sur les enroulements statoriques. Ce redres-
seur est classiquement suivi d'un hacheur lvateur permettant de dlivrer une tension suffi-
sante l'onduleur MLI pour les faibles vitesses de rotation. La prsence de l'onduleur MLI
permet de contrler le facteur de puissance cot rseau. Ces convertisseurs sont toutefois di-
mensionns pour la totalit de la puissance nominale de la machine et entranent jusqu' 3%
de cette puissance de pertes [11].
Le champ magntique de la gnratrice synchrone peut tre obtenu par des aimants ou par
un bobinage dexcitation conventionnel. Si elle possde un nombre suffisant de ples, elle
MSAP
Chapitre I Chapitre I Chapitre I Chapitre I Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne Gnralits sur lnergie olienne
24
peut sutiliser pour les applications dentranement direct (direct-drive) qui ne ncessitent pas
de boite de vitesses (gearless). Pour des units de petites tailles, le gnrateur aimants per-
manents (MSAP) est plus simple est moins coteux. Au-del de 20 kW (environ), le gnra-
teur synchrone est plus coteux et complexe quun gnrateur asynchrone de taille quiva-
lente.
Ces avantages sont la motivation principale du choix sur le quel se base ce travail, savoir
ltude dun systme de gnration dnergie olienne utilisant une MSAP, dune puissance
de 600Watts.
Aprs la modlisation du systme de production, ltude portera sur loptimisation de la
puissance que peut fournir la turbine olienne via une commande du coefficient de puissance
qui caractrise cette dernire. Puis nous allons contrler la puissance lectrique produite de
sorte ce quelle soit optimale et constante dune part puis variable tout en essayant de main-
tenir la puissance ractive gale zro mais capable de prendre une autre valeur en cas de
besoin. Ces oprations de contrle se feront grce des rgulateurs de type PI puis IP afin de
comparer les rsultats obtenus. Lalimentation de la charge se fera via un onduleur six bras
commandables aliments par la gnratrice travers un redresseur MLI.
Conclusion
Dans ce premier chapitre, nous avons prsent des gnralits sur la production de
lnergie lectrique partir de lexploitation de lnergie olienne et son importance en tant
qunergie verte. Nous avons galement prsent une valuation du potentiel olien Algrien
afin davoir une ide sur limportance de linvestissement dans ce crneau. Nous avons ga-
lement consacr ce chapitre la description dune olienne, le calcul de la puissance extraite
de la rotation de celle-ci, et les objectifs derrire le contrle de son fonctionnement. Enfin,
Nous avons donn un aperu sur la conversion lectromcanique et les diffrents types de
machines utilises. La comparaison entre ces machines a dgag lide de consacrer notre
tude un systme utilisant une machine synchrone aimants permanents (MSAP).
Chapitre II Chapitre II Chapitre II Chapitre II
Modlisation de la turbine olienne Modlisation de la turbine olienne Modlisation de la turbine olienne Modlisation de la turbine olienne
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
25
II.I. Introduction
Dans le chapitre prcdent nous avons abord la structure externe dune olienne, qui sert
capter lnergie du vent, et la structure interne charge de la transformer en nergie
lectrique. Dans le chapitre II, nous allons tablir un modle mathmatique qui permettra de
simuler le comportement de lolienne dans un cadre de fonctionnement bien dfini.
Un systme physique est un ensemble de sous systmes ce qui permet de sintresser
chaque partie sparment afin de simplifier ltude avant de faire une synthse de toutes les
parties constituant le systme global. Cest pour cette raison que nous allons dans cette partie,
commencer par modliser le vent, puis nous allons nous intresser la modlisation de la
turbine choisie. Nous allons galement proposer une stratgie de commande de la turbine qui
permettra de rguler sa vitesse de rotation, de sorte optimiser la puissance extraite, quelque
soient les fluctuations de la vitesse du vent. Pour ce faire, nous allons dans un premier temps
utiliser un rgulateur PI puis un rgulateur IP afin de dterminer celui qui permet dobtenir
un meilleur fonctionnement quelque soit la variation du vent.
II.2. Modlisation du vent
Le vent est la source principale dnergie pour faire fonctionner une olienne, cest
pourquoi il est ncessaire de connatre son modle mathmatique. Celui-ci peut tre une
simple loi exponentielle o bien utilisant des distributions spectrales et spatiales trs
complexes qui rendent compte de sa phnomnologie turbulente [7].
La modlisation du vent est primordiale que ce soit pour :
- dfinir les conditions de fonctionnement de lolienne ;
- dfinir les sollicitations qui sappliquent sur les pales ;
- dvelopper et affiner la modlisation du rotor ;
- valuer le potentiel dnergie utilisable ;
- fournir une aide pour limplantation des machines
La dfinition du modle du vent ncessite des donnes climatiques et gographiques du
site concern, ainsi que la priode de lan concerne par ltude. Le modle du vent est donn
par une reprsentation en srie de Fourrier qui prsente le vent comme un signal constitu par
une superposition de plusieurs harmoniques. Il est donn par II.1 [7].
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
26
sin
II.1
Avec :
A : la valeur moyenne de la vitesse du vent
: amplitude de lharmonique de lordre k
: pulsation de lharmonique de lordre k
i : le rang du dernier harmonique retenu dans le calcul du profil du vent
II.3. Modlisation de la turbine olienne
II.3.1. Hypothses simplificatrices pour la modlisation mcanique de la turbine
Considrons une turbine olienne trois pales orientables, fixes sur un larbre de la
turbine formant ainsi un bloc mcanique capable de tourner grce lnergie du vent. Ceci
permet de dduire que chaque partie de cet ensemble subit trois contraintes savoir sa propre
inertie, le frottement et la contrainte lastique. Dune manire gnrale larbre de la turbine
est solidaire dun multiplicateur de vitesse, qui, son tour est li larbre de la gnratrice. La
figure II.1 illustre dune manire dtaille le schma quivalent de la turbine olienne [17].
Figure II.1 : Schma mcanique quivalent de la turbine olienne [17]
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
27
Les trois pales sont considres de conception identique et possdent donc :
la mme inertie
la mme lasticit
le mme coefficient de frottement par rapport lair
Ces pales sont orientables et prsentent toutes un mme coefficient de frottement par
rapport au support
. Les vitesses dorientation de chaque pale sont notes
.
Chaque pale reoit une force
qui dpend de la vitesse du vent qui lui est
applique.
Larbre dentranement des pales est caractris par :
son inertie
son lasticit
son coefficient de frottement par rapport au multiplicateur
Le rotor de la gnratrice possde :
une inertie
un coefficient de frottement
Ce rotor transmet un couple entranant (
) la gnratrice lectrique et tourne une
vitesse note
. La turbine comporte galement un multiplicateur de vitesse not G.
Si lon considre une rpartition uniforme de la vitesse du vent sur toutes les pales et donc
une galit de toute les forces de pousse (
) alors on peut considrer
lensemble des trois pales comme un seul et mme systme mcanique caractris par la
somme de toutes les caractristiques mcaniques. De part la conception arodynamique des
pales, leur coefficient de frottement par rapport lair
est trs faible et peut tre ignor.
De mme, les pertes par frottement ct turbine sont ngligeables par rapport aux pertes par
frottement du ct de la gnratrice.
En tenant compte de ces considrations, le modle mcanique de la figure II.1 devient
celui donn dans la figure II.2 comportant deux masses tournantes grce au couple
arodynamique
[17].
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
28
Figure II.2 : Schma mcanique quivalent simplifi de la turbine olienne [17]
II.3.2. Modlisation de la turbine tudier
La turbine considre est axe horizontal, de rayon 0.5m, dune hauteur de 2m, et dune
puissance de 600watt. Elle ne comporte pas de multiplicateur de vitesse (figure II.3) [15].
Elle est caractrise par lquation caractristique de
suivante :
0.2121
0.0856
0.2539 (II.2)
Figure II.3 : Schma simplifi de la turbine olienne [17].
II.3.3. Equation dynamique de larbre
La masse de la turbine olienne est reporte sur larbre de la turbine sous la forme dune
inertie note
et comprend la masse des pales et la masse du rotor de la turbine. Le
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
29
modle mcanique propos considre linertie totale J constitue de linertie de la turbine
reporte sur le rotor de la gnratrice et de linertie de cette dernire [17].
(II.3)
Il est noter que linertie du rotor de la gnratrice est trs faible par rapport linertie de
la turbine reporte par cet axe.
Lquation fondamentale de la dynamique permet de dterminer lvolution de la vitesse
mcanique partir du couple mcanique total
appliqu au rotor :
(II.4)
(II.5)
J : linertie totale qui apparat sur le rotor de la gnratrice.
: le couple mcanique,
: le couple lectromagntique produit par la gnratrice,
: le couple des frottements visqueux.
Le couple rsistant d aux frottements est modlis par un coefficient de frottements visqueux
tel que
.
La modlisation dune turbine olienne revient connaitre le couple quelle dveloppe au
niveau du rotor, et quelle extrait de la puissance olienne, suivant ces quations [10] :
1
2
.
. . .
(II.6)
(II.7)
1
2
. . .
(II.8)
Afin dobtenir la vitesse de rotation de la turbine, on utilise lquation mcanique de
larbre de la turbine solidairement li celui de la machine synchrone utilise.
(II.9)
: la puissance olienne, : la vitesse relative de la turbine,
: la vitesse de rotation,
: la vitesse du vent, : la densit de lair,
: le coefficient de puissance,
: le couple
olien,
: inertie de la turbine,
: inertie de la machine,
: couple lectromagntique,
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
30
: coefficient de frottements visqueux dans la machine.
Remarque : le coefficient de frottements visqueux dans la turbine est ngligeable.
II.4. Maximisation de la puissance avec asservissement de la vitesse
Afin dextraire un maximum de puissance malgr les variations frquentes de la vitesse du
vent, une commande par lasservissement de la vitesse de rotation permet de maintenir le
rapport entre la puissance extraite et celle du vent sa valeur maximale. En dautres termes
maintenir le coefficient de puissance
sa valeur maximale. Cette commande ncessite
lutilisation dun rgulateur de vitesse [17].
Nous avons procd la simulation de la turbine en utilisant les quations donnes
prcdemment. Les conditions de simulation sont les suivantes:
1-
0.15 : cest le coefficient de puissance maximum
2-
0.78 : cest la vitesse relative maximale .
3- Le schma de simulation doit permettre de commander la vitesse de rotation de sorte
maintenir les valeurs maximales de
et quelque soit la vitesse du vent. Pour cela
nous allons utiliser un contrleur de vitesse (rgulateur PI), puis un rgulateur IP.
Afin de raliser la commande de la vitesse facteur de puissance maximum, on a mis en
uvre le schma bloc de la figure (II.4) bas sur les quations (II.4), (II.5) et (II.6).
Figure II.4 : Schma bloc de la turbine avec maximisation de la puissance extraite
laide dun asservissement de la vitesse [17]
1
2
. . .
3
.
2
.
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
31
Le vent tant la source principale dnergie pour le fonctionnement du systme, il fournie
le couple arodynamique
dont on soustrait le couple lectromagntique cr dans la
gnratrice on obtient le couple mcanique qui permet de calculer la vitesse de rotation. Mais
pour commander cette dernire on calcul la vitesse qui correspond
. Ensuite on
gnre le couple lectromagntique de rfrence en se servant dun contrleur.
II.5. Dtermination de la vitesse de rfrence
La commande de la vitesse de rotation de la turbine ncessite dimposer une vitesse de
rotation de rfrence qui permet de vrifier les conditions 02 et 03 du paragraphe II.4, c'est--
dire
0.15 et
0.78 .
La vitesse de rotation de rfrence est donne par
(II.10)
II.6. Synthse des rgulateurs
II.6.1. Calcul des paramtres du rgulateur de vitesse PI
Considrons le schma de commande donn par la figure II.4 Le couple
lectromagntique de rfrence est obtenu grce laction dun contrleur de type PI sur la
diffrence entre la vitesse de rfrence et la vitesse de rotation.
La fonction de transfert qui dcrit cette action est donne par
(II.10)
: le gain intgral
: le gain proportionnel
Si on isole la partie du schma de commande qui concerne la boucle de rgulation de la
vitesse on obtient le schma de la figure II.6 [20]
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
32
Figure II.6: Schma bloc de lasservissement en utilisant un rgulateur PI
Comme le systme tudier est linaire on peut crire, en vertu du thorme de superposition,
la fonction de transfert sous la forme suivante :
(II.11)
(II.12)
(II.13)
Au rgime permanent lerreur statique due la perturbation externe en loccurrence le couple
arodynamique
est nulle grce la fonction intgrale du rgulateur.
La fonction de transfert scrira alors comme ceci :
(II.14)
Le choix dune pulsation propre
et dun facteur damortissement
permettent de calculer
les coefficients du rgulateur PI.
. (II.15)
2.
. (II.16)
II.6.2. Calcul des paramtres du rgulateur de vitesse IP
On considre un rgulateur intgral proportionnel IP de la Figure II.7.
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
33
Figure II.7: Schma bloc du rgulateur IP
La fonction de transfert se met sous la forme suivante :
(II.17)
(II.18)
(II.19)
Le choix dune pulsation propre
et dun facteur damortissement
permettent de calculer
les coefficients du rgulateur IP.
2.
. (II.20)
(II.21)
II.7. Rsultats de simulation
Lquation caractristique de la turbine fournie par le constructeur est telle que donne
par:
0.2121
0.0856
0.2539 [16].
Cette quation permet de tracer le coefficient de puissance
de la turbine en fonction de la
vitesse relative (figure II.8).
Nous avons trac galement une srie de courbes (figure II.9), qui reprsente la variation
de la puissance olienne extraite en fonction de la vitesse de rotation pour une valeur
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
34
constante du vent. Les valeurs de la vitesse du vent choisies au hasard sont 7m/s, 9m/s, 11m/s,
13m/s et 15m/s, sachant que la turbine dmarre de larrt.
Figure II.8 : Allure de la caractristique
mcanique
La figure II.9 : Allure de la puissance
olienne extraite en fonction de la vitesse
de rotation
La figure II.8 montre une courbe en forme de cloche qui correspond celle dune olienne
tripale axe horizontale.
La figure II.9 montre que pour chaque vitesse que prend le vent, la courbe dvolution de la
puissance olienne passe par une valeur maximale. La commande de la vitesse de rotation doit
permettre de ramener la vitesse de rotation celle qui correspond ces sommets de la
puissance, et donc dextraire un maximum de puissance olienne pour chaque variation de la
vitesse du vent.
II.7.1. Rsultats de simulation avec le rgulateur PI
Le schma de simulation de la figure II.4 permet de commander la vitesse de rotation de
sorte maintenir les valeurs maximales de
et quelque soit la vitesse du vent. Pour cela
nous avons utilis deux contrleurs de vitesse : rgulateur PI, puis un rgulateur IP.
Le modle utilis dans notre tude est donn par la relation :
7.5 0.2 sin0.1047 2 sin0.2665 sin1.2930 0.2 sin3.6645 (II.22)
Lallure du vent donn par la relation II.22 est reprsente par la figure II.10. Ensuite, lallure
de la de la vitesse de rotation de rfrence est donne reprsente par la figure II.11.
0 0.2 0.4 0.6 0.8 1 1.2 1.4
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
lambda
C
p
0 5 10 15 20 25 30 35 40
0
100
200
300
400
500
600
omega(rad/s)
p
u
i
s
s
a
n
c
e
(
w
)
15m/s
13m/s
11m/s
9m/s
7m/s
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
35
Figure II.10 : Allure du profil du vent
utilis reproduit sous MATLAB
Figure II.11 : Allure de la vitesse de
rotation de rfrence
Figure II.12 : Allure de la vitesse
mcanique de la turbine
Figure II.13 : Allure de la vitesse
mcanique et sa vitesse de rfrence
Considrons que la turbine a atteint son rgime permanent de fonctionnement, la vitesse
de rotation relle de larbre de la turbine donne par la figure II.12 permet e constater quelle
est la rplique exacte de la vitesse de rfrence comme le montre la figure I.13. Nanmoins,
un zoom sur cette dernire montre quil existe une diffrence entre la vitesse de rfrence et la
vitesse de rotation. Cette diffrence peut tre donne par lerreur er=(
. La figure
II.15 donne la variation de lerreur sur tout lintervalle de temps de simulation.
0 20 40 60 80 100 120
0
5
10
15
temps t(s)
V
i
t
e
s
s
e
d
u
v
e
n
t
(
m
/
s
)
0 20 40 60 80 100 120
0
5
10
15
20
25
temps t(s)
l
a
v
i
t
e
s
s
e
d
e
r
o
t
a
t
i
o
n
d
e
r
f
e
r
e
n
c
e
(
r
a
d
/
s
)
0 20 40 60 80 100 120
0
5
10
15
20
25
temps t (s)
v
i
t
e
s
s
e
m
c
a
n
i
q
u
e
(
r
a
d
/
s
)
0 20 40 60 80 100 120
0
5
10
15
20
25
temps t(s)
w
m
e
c
e
t
w
r
e
f
(
r
a
d
/
s
)
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
36
Figure II.14 : Lerreur entre la vitesse de
rfrence et la vitesse de rotation
Figure II.15 : Variation de lerreur entre
la vitesse de rfrence et la vitesse de
rotation
La valeur moyenne de cette erreur est de 0.0015, tandis que sa valeur maximale est de 0.1182.
Figure II.16 : Allure du coefficient de
puissance Cp
Figure II.17 : Allure de lerreur sur le
coefficient de puissance Cp
La commande par asservissement de la vitesse a permis de maintenir la valeur du coefficient
de puissance sa valeur maximale qui est de 0.15 malgr une lgre fluctuation de lordre de
10
comme le montre la figure II.16.
La valeur moyenne de cette erreur est de 5.3473. 10
tandis que sa valeur maximale est de
5.5536. 10
.
29.5 29.6 29.7 29.8 29.9 30 30.1 30.2 30.3 30.4
16.35
16.4
16.45
16.5
16.55
16.6
temps t(s)
w
m
e
c
,
w
r
e
f
(
r
a
d
/
s
)
wmec
wref
0 20 40 60 80 100 120
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
temps t(s)
l
'
e
r
r
e
u
r
(
w
r
e
f
-
w
m
e
c
)
(
r
a
d
/
s
)
0 20 40 60 80 100 120
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
temps t(s)
c
o
e
f
f
i
c
i
e
n
t
d
e
p
u
i
s
s
a
n
c
e
C
p
0 20 40 60 80 100 120
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
x 10
-4
temps t(s)
l
'
e
r
r
e
u
r
(
C
p
m
a
x
-
C
p
)
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
37
II.7.2. Rsultats de simulation avec le rgulateur IP
Figure II.16 : Allure de la vitesse
mcanique et sa vitesse de rfrence
Figure II .17 : Allure du coefficient de
puissance Cp
Figure II.18 : Variation de lerreur entre la vitesse de rfrence et la vitesse mcanique
avec le rgulateur IP
La valeur moyenne de cette erreur est de 3.0653.10
, tandis que sa valeur maximale est de
0.1988.
0 20 40 60 80 100 120
0
5
10
15
20
25
temps t (s)
v
i
t
e
s
s
e
m
c
a
n
i
q
u
e
(
r
a
d
/
s
)
0 20 40 60 80 100 120
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
temps t(s)
c
o
e
f
f
i
c
i
e
n
t
d
e
p
u
i
s
s
a
n
c
e
C
p
0 20 40 60 80 100 120
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
temps t's)
v
a
r
i
a
t
i
o
n
d
e
l
'
e
r
r
e
u
r
(
w
r
e
f
-
w
m
e
c
)
(
r
a
d
/
s
)
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
38
Figure II .19 : Allure de la vitesse
mcanique obtenue avec le rgulateur PI
et celle obtenue avec le rgulateur IP
Figure II.20 : Variation de lerreur entre les
vitesses mcaniques obtenues avec le
rgulateur PI et le rgulateur IP
La comparaison entre la vitesse de rotation rgule via le rgulateur PI et celle rgule via
le rgulateur IP (figure II.20) montre une diffrence de 0.2905 rad/s au maximum et de
0.0022 rad/s en moyenne.
Figure II.21 : Comparaison de la rapidit de la rponse des deux rgulateurs PI et IP
La figure II.21 montre une lgre avance de la rponse du rgulateur IP sur celle du rgulateur
PI.
0 20 40 60 80 100 120
0
2
4
6
8
10
12
14
16
18
temps t(s)
w
m
e
c
-
p
i
,
w
m
e
c
-
i
p
(
r
a
d
/
s
)
0 20 40 60 80 100 120
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
temps t(s)
l
'
e
r
r
e
u
r
s
u
r
l
e
s
v
i
t
e
s
s
e
s
d
e
r
o
t
a
t
i
o
n
(
r
a
d
/
s
)
33.1 33.2 33.3 33.4 33.5 33.6 33.7 33.8 33.9 34
12.4
12.41
12.42
12.43
12.44
12.45
12.46
12.47
12.48
12.49
12.5
temps t(s)
w
m
e
c
-
P
I
e
t
w
m
e
c
-
I
P
(
r
a
d
/
s
)
wmec-IP
wmec-PI
Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de Chapitre II Modlisation de la turbine olienne la turbine olienne la turbine olienne la turbine olienne
39
Conclusion
Dans ce chapitre nous avons modlis le vent et la turbine olienne, de plus nous avons
valid notre modle en le reproduisant sous MATLAB. Nous avons galement tabli un
schma de commande qui permet de contrler la puissance fournie par lolienne grce un
asservissement de la vitesse de celle-ci. Lasservissement de la vitesse de lolienne est assur
par un rgulateur proportionnel intgral puis par un rgulateur intgral proportionnel. Les
rsultats obtenus ont permis de comparer lefficacit des deux types de rgulateurs sur le
rglage de la vitesse de rotation de la turbine, puisque lerreur par rapport la vitesse de
rfrence est de lordre de 0.0001pour les deux rgulateurs. Mais pour ce qui est de la rapidit
de la rponse la figure II.20 a bien montr que le rgulateur IP est plus rapide.
Chapitre Chapitre Chapitre Chapitre III III III III
Modlisation de la machine synchrone Modlisation de la machine synchrone Modlisation de la machine synchrone Modlisation de la machine synchrone
aimants permanents aimants permanents aimants permanents aimants permanents
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
40
III.1. Introduction
Les alternateurs triphass sont la source primaire de toute l'nergie lectrique. Entraines
par des turbines hydrauliques, vapeur ou oliennes, ces machines constituent les plus gros
convertisseurs d'nergie au monde. Elles transforment l'nergie mcanique en nergie
lectrique avec des puissances allant jusqu' 1500 MW [15].
Dans notre tude nous allons nous intresser une olienne vitesse variable utilisant une
gnratrice synchrone aimants permanents. Ce choix nest pas fortuit puisquil est bas sur
les avantages technologiques et conomiques quoffre la MSAP compare aux autres
machines.
Lutilisation des aimants permanents a t une vrai rvolution dans le domaine de
lutilisation de ces machine, car elle a permis dliminer le bobinage rotorique et son
excitation ainsi que les balais et les contacts glissants. Ce qui induit moins de maintenance
et plus de robustesse pour la machine. Cet avantage a couvert le cout lev des aimants
[14,15].
Le progrs technologique dans le domaine de llectronique de puissance a galement
conduit vers un progrs important dans les performances globales des entrainements vitesse
variable, ce qui facilite lautopilotage de la machine synchrone la rendant ainsi trs
performante compare la machine asynchrone et celle courant continu [8].
Mais lavantage le plus important de ces machines dans le domaine olien est labsence de
multiplicateur de vitesse pour des machines de grand nombre de paires de ples, rduisant
ainsi le volume de lolienne et la maintenance du systme [24].
III.2. Description
Lalternateur est form dun stator fixe, et dun rotor tournant. Le stator ou induit se
compose d'un noyau feuillet ayant la forme d'un cylindre vide et comportant des encoches
dans lesquelles sont logs les conducteurs d'un enroulement triphas 2p ples. Les bobines
constituant cet enroulement sont dcales de
et toujours raccordes en toile et le neutre est
accessible pour permettre sa mise la terre. Le rotor ou inducteur comporte p ples nord et p
ples sud intercals. Ces ples sont crs par des bobines alimentes en courant continu ou
par des aimants permanents. Le rotor est soit ples saillants ou ples lisses [23].
Le nombre de ples d'un alternateur est impos par la vitesse du rotor et par la frquence
du courant produire. Ainsi, considrons un conducteur de l'induit devant lequel se dplacent
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
41
les ples nord et les ples sud du rotor. Si la tension induite dans ce conducteur rend une srie
de valeurs positives pendant le passage d'un ple nord, elle prendra une srie de valeurs
gales, mais ngatives, pendant le passage d'un ple sud. Chaque fois qu'une paire de ples se
dplace devant un conducteur, la tension induite dcrit donc un cycle complet. On en dduit
que la frquence est donne par l'quation :
Il existe quatre catgories de machines synchrones aimants permanents du point de vue
Construction mcanique :
Machines synchrones aimants permanents monts en surface (MSAPS)
Cette structure est la plus simple construire parce que des aimants permanents
aimantation radiale sont disposs directement sur la priphrie du rotor (figure III.4). Les
aimants ont gnralement une forme de tuile et sont colls sur une culasse cylindrique. Cette
structure de machine rentre dans la catgorie des machines ples lisses. La tenue mcanique
des aimants est facilite par la force centrifuge.
Figure III.4 : Machines synchrones aimants permanents monts en surface [23]
Machines synchrones aimants permanents insrs (MSAPI)
partir de la structure prcdente, on entaille des logements pour insrer les aimants
permanents dans le rotor afin de faciliter l'assemblage mcanique (figure III.5). Les parties de
fer entre les aimants permanents sont des espaces interplaires qui rajoutent de la saillance.
Toutefois, les caractristiques de cette structure restent fondamentalement proches de la
MSAPS.
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
42
Figure III.5: Machines synchrones aimants permanents insrs [23]
Machines synchrones aimants permanents chapeauts (MSAPC)
Cette structure est dduite de celles avec des aimants permanents monts en surface. On
place sur les aimants des pices polaires gnralement en acier doux. La combinaison des
aimants et des pices polaires cre une anisotropie du rotor et rajoute une saillance. Les pices
polaires permettent de contrler la forme de la f.e.m au stator en agissant sur le profil de la
pice
Figure III.6: Machines synchrones aimants permanents chapeauts [23]
Machines synchrones aimants permanents enterrs (MSAPE)
Le principe de cette structure est d'augmenter l'induction magntique dans l'entrefer par
rapport l'induction rmanente des aimants permanents (figure III.7). En fait, les pices
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
43
polaires canalisent le flux gnr par les aimants permanents aimantation tangentielle dont
la surface latrale est suprieure la demi-surface de la pice polaire prise au niveau de
l'entrefer.
Figure III.7: Machines synchrones aimants permanents enterrs [23]
III.3. Principe de fonctionnement dune gnratrice synchrone
Linducteur de la gnratrice synchrone, entrain mcaniquement, cre un champ
rpartition spatiale variable dans les bobinages statoriques. Les f.e.m induites dans ces
bobinages provoquent la circulation de courants induits qui crent leur tour un champ
statorique dans lentrefer, qui tourne la mme vitesse que celle du champ inducteur [9].
III.4. Avantages de la machine synchrone aimants permanents
Compare la machine asynchrone et courant continu, la machine synchrone aimants
permanents prsente les principaux avantages suivants [10, 14, 15] :
Robustesse inconteste par rapport la machine courant continu.
Augmentation de la constante de temps thermique et de la fiabilit grce
llimination des bagues et des balais.
Facteur de puissance et rendement plus levs par rapport la machine asynchrone.
Cette structure donne la machine lavantage de rduire les dimensions et par
consquent un moindre moment dinertie, ce qui augmente sa fiabilit et sa densit de
puissance par unit de volume.
Lutilisation daimants permanents au rotor permet dliminer les pertes lectriques
dans le circuit rotorique.
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
44
Elle possde un couple moteur lev au dmarrage ce qui permet dliminer le
multiplicateur de vitesse pour les systmes oliens.
III.5. Synchronisation des alternateurs
Pour brancher un alternateur sur le rseau ou le coupler avec un autre alternateur, il faut
respecter les conditions suivantes [6] :
1. la tension de l'alternateur doit tre gale celle du rseau
2. la frquence de l'alternateur doit tre la mme que celle du rseau
3. la tension de l'alternateur doit tre en phase avec celle du rseau
4. la squence des phases de l'alternateur doit tre la mme que celle du rseau
La mise en pratique de ces conditions est appele Procdure de synchronisation. En
agissant sur le rgulateur de vitesse de la turbine, on amne tout d'abord l'alternateur une
vitesse voisine de la vitesse synchrone, afin que sa frquence soit proche de celle du rseau.
On rgle ensuite l'excitation de faon que la tension induite soit gale celle du rseau.
III.6. Modlisation de la machine synchrone aimants permanents
III.6.1. Hypothses simplificatrices
Afin de simplifier la modlisation de la machine synchrone, il est ncessaire de poser les
hypothses simplificatrices suivantes [16,17] :
Le stator connect en toile, neutre en lair pour liminer la composante
homopolaire des courants.
La saturation du circuit magntique est nglige ce qui mne exprimer les
flux magntiques comme des fonctions linaires des courants des phases.
La distribution de la FMM dans lentrefer est sinusodale, les harmoniques
despace sont alors ngligs.
Les pertes par hystrsis et par courants de Foucault sont ngliges.
Leffet de peau et de la temprature est nglig.
III.6.2. Equations de la machine synchrone aimants permanents
La machine synchrone aimants permanents est constitue par trois bobinages statoriques
qui constituent les trois phases, et des aimants au rotor distribus en 17 paires de ples.
Les flux cres par les aimants permanents sont de forme sinusodale le long de lentrefer. Les
expressions des flux mutuels inducteur-phase sont donnes par [10]:
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
45
cos (III.1)
cos
2
3
(III.2)
cos
4
3
(III.3)
: cest la valeur crte du flux cre par laimant permanent travers les enroulements
statoriques.
Les quations lectriques de la MSAP dans le plan (a,b,c) sont :
(III.4)
(III.5)
(III.6)
:
vecteur des flux statoriques
: Rsistance dune phase denroulement statorique
III.6.3. Equations de la machine synchrone aimants permanents dans le plan de
Park
Afin de simplifier ltude, on utilise la transformation de Park qui est un outil
mathmatique permettant de transformer les axes magntiques des bobines statoriques (a,b,c)
en axes orthogonaux (d,q). Ce qui se traduit par le remplacement des bobinages statoriques
(a,b,c) par des bobinages quivalents (d,q) [10].
La transformation de Park est donne par :
2
3
2
3
4
3
2
3
4
3
1
2
1
2
1
2
(III.7)
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
46
Et inversement, pour passer des quations dans le plan de Park aux quations dans le plan
(a,b,c) on utilise la transformation de Park inverse qui est donne par :
2
3
1
2
2
3
2
3
1
2
4
3
4
3
1
2
(III.8)
Le changement de variable effectu aux quations des tensions, courants et flux, on obtient :
(III.9)
(III.10)
(III.11)
Enfin, les quations de la machine synchrone dans le repre de Park sont donnes
par les expressions suivantes:
(III.12)
(III.13)
III.6.4. Expression du couple lectromagntique
(III.14)
(III.15)
O
p : le nombre de paires de ples
: la tension statorique sur laxe d
: la tension statorique sur laxe q
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
47
: la tension statorique sur laxe d
: la tension statorique sur laxe q
: la rsistance statorique
: linductance statorique sur laxe d
: linductance statorique sur laxe q
: le coefficient du couple
: le flux inducteur
III.7. Commande vectorielle de la MSAP
Parmi les stratgies de commande vectorielle appliques la machine synchrone, celle qui
consiste imposer une rfrence du courant direct
zro est la plus rpandue. Cela permet
de simplifier lexpression du couple lectromagntique de lquation III.14 en une expression
linaire donne par
(III.16)
Ce dernier est alors rgl en agissant sur le courant en quadrature
Pour pouvoir appliquer la commande vectorielle nous devons :
poser une rfrence
0
poser
poser une rfrence
III.8. Commande vectorielle avec dcouplage de la rgulation des courants par
f compensation
Afin de justifier le recourt la commande vectorielle avec dcouplage de la rgulation
des courants par compensation, examinons dabord le modle de la machine synchrone dans
le plan de Park qui est donn par les quations (III.17-III.18)
(III.17)
: f.e.m de la machine sur laxe q
(III.18)
: f.e.m de la machine sur laxe d
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
48
La commande vectorielle avec dcouplage de la rgulation des courants par compensation
permet de dcoupler les courants
et
et de permettre de faire la rgulation adquate
chacun des deux sparment. Cette commande nous mne un modle de la machine
synchrone similaire celui dune machine courant continu excitation spare.
Les termes de couplage en
,
.
,
sont considrs comme des perturbations
mesurables [18]. Ainsi la machine peut tre reprsente par la fonction de transfert suivante :
.
1
1
(III.19)
Avec
: la constante de temps lectrique
Si on tient compte de la perturbation,
sera sous la forme donne en III.20, en vertu du
thorme de superposition
,
,
(III.20)
Afin dimposer la rfrence du courant sur laxe d gale zro on utilise un rgulateur PI. La
boucle de rgulation du courant
est donne par le schma bloc suivant :
Figure III.9 : Boucle de rgulation du courant
.
1
1
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
49
III.9. Calcul du rgulateur PI
La fonction de transfert en boucle ouverte est donne comme suit :
.
1
.
1
.
1
1
(III.21)
En fin
(III.22)
: La constante de temps lectrique
: Le gain statique
La fonction de transfert en boucle ferme est donne par
Les paramtres du rgulateur sont calculs par la mthode de placement de ple
La fonction de transfert en boucle ouverte est
.
1
.
1
1
(III.23)
La fonction de transfert en boucle ferme est
(III.24)
(III.25)
(III.26)
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
50
La boucle de rgulation du courant
est donne par le schma bloc suivant :
Figure III.11 : Boucle de rgulation du courant
(III.27)
(III.28)
1
2
.
. . .
(III.29)
(III.30)
Si on remplace la puissance olienne
et la surface active S, par leurs formules respectives,
donnes en (III.18) et (III.19), on obtient :
. .
2.
(III.31)
III.10. Rsultats de simulation
Lassociation de la gnratrice la turbine permet la gnration de lnergie lectrique,
cest pourquoi nous avons procd des simulations sous Matlab-Simulink afin de voir le
comportement de la gnratrice synchrone en visualisant sa vitesse de rotation ainsi que les
tensions et courants suivants les axes d et q, pendant le fonctionnement en rgime permanent
sachant que
0 e
t.
.
1
1
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
51
Figure III.15 : Allure de la vitesse de
rotation
Figure III.16: Allure de la pulsation
lectrique
Les figures III.15 et III.16 montrent linfluence de la vitesse du vent sur la vitesse de rotation
de la turbine, ainsi que la pulsation lectrique. Toutes ces grandeurs sont de la mme forme du
fait de la relation linaire qui existe entre elles.
Les figures III.17 et III.18 montrent lallure des tensions
et
respectivement, o la
tension
prsente la mme forme que celle du vent tandis que la tension
est ngative.
Figure III.17: Allure de la tension
Figure III.18: Allure de la tension
0 20 40 60 80 100 120
0
5
10
15
20
25
temps t (s)
v
i
t
e
s
s
e
m
c
a
n
i
q
u
e
(
r
a
d
/
s
)
0 20 40 60 80 100 120
100
120
140
160
180
200
220
240
260
280
300
temps t(s)
p
u
l
s
a
t
i
o
n
l
e
c
t
r
i
q
u
e
(
r
a
d
/
s
)
0 20 40 60 80 100 120
-12
-10
-8
-6
-4
-2
0
2
temps (s)
L
a
t
e
n
s
i
o
n
V
d
(
V
)
0 20 40 60 80 100 120
15
20
25
30
35
40
45
50
temps (s)
L
a
t
e
n
s
i
o
n
V
q
(
V
)
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
52
Figure III.19 : Allure du courant
Figure III.20 : Allure du courant
La figure III.19 montre un courant
port zro grce la commande vectorielle applique
la machine synchrone.
Lapplication de la transforme inverse de Park aux tensions
et
permet de tracer lallure
des tensions des phases
. Lallure de la tension dune phase sur une dure de 120s
est donne par la figure III.21. De plus et afin de vrifier que lassociation de la machine la
turbine naffecte pas la commande de la vitesse de rotation effectue au chapitre II, nous
avons trac lallure du coefficient de puissance (figure III.22).
Figure III.21: Allure de la tension dune
phase statorique
Figure III.22 : Allure du coefficient de
puissance
0 20 40 60 80 100 120
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
temps (s)
L
e
c
o
u
r
a
n
t
i
d
(
A
)
0 20 40 60 80 100 120
0
2
4
6
8
10
12
14
16
temps (s)
L
e
c
o
u
r
a
n
t
i
q
(
A
)
0 20 40 60 80 100 120
-50
-40
-30
-20
-10
0
10
20
30
40
50
temps (s)
L
a
t
e
n
s
i
o
n
d
'
u
n
e
p
h
a
s
e
(
v
)
0 20 40 60 80 100 120
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
temps t(s)
c
o
e
f
f
i
c
i
e
n
t
d
e
p
u
i
s
s
a
n
c
e
C
p
Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents Chapitre III Modlisation de la machine synchrone aimants permanents
53
Conclusion
Ce chapitre a t consacr la prsentation et la modlisation de la machine synchrone
aimants permanents. Nous avons prsent diffrentes structures concernant la construction de
celle-ci du point de vue emplacement des aimants permanents. Nous avons ensuite prsent
les quations rgissant son fonctionnement, avec la commande vectorielle qui permet la
modlisation dune gnratrice synchrone aimants permanents.
Dans la deuxime partie de ce chapitre nous avons prsent les rsultats de simulation
obtenus. Nous avons de cette manire vrifi les conditions de la commande vectorielle
savoir
0 et
.
Les tensions de sortie ainsi obtenues seront les entres de rfrence du redresseur MLI qui
sera modlis et simul dans le chapitre V. Lallure de ces tensions comme le montre la figure
III.21 varie en fonction des variations du vent.
Chapitre IV Chapitre IV Chapitre IV Chapitre IV
Commande de la puissance active et Commande de la puissance active et Commande de la puissance active et Commande de la puissance active et
ractive ractive ractive ractive
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
54
IV.1. Introduction
Aprs avoir modlis la chaine de conversion de lnergie olienne, nous sommes en
mesure de donner lallure de la puissance lectrique produite.
Toutefois, la puissance produite par lolienne varie normment tout au long de la
journe, car la puissance produite suit la puissance disponible dans le vent et prsente les
mmes variations que ce dernier. Dans ce chapitre, nous allons proposer une tude
dveloppe sur un systme de conversion olienne permettant de produire une puissance
constante dans un premier temps, puis variable dans un second, tout en offrant des services,
tel que la correction de la puissance ractive fournie. La commande de puissance ractive
permet doffrir un service apprciable et utile pour la gestion et le maintien du plan de tension
au rseau auquel lolienne est connecte [31].
IV.2. Stratgie de contrle
Avec le convertisseur ct de la charge, il est possible de commander les puissances
actives et ractives qui alimentent la charge. Le systme complet est montr sur la figure
IV.1.
Figure IV.1: Commande de la puissance active et ractive [23]
Iref(a,b,c)
Pref
Qref
PMSG
Commande
MLI
Courant de
rfrence calcul
I(a,b,c)
V(a,b,c)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
55
La synthse des contrleurs de puissance active et ractive peut tre faite analytiquement en
utilisant le modle de Park dans les coordonnes d q dont la forme est rappele dans (IV.1)
et (IV.2) [25].
(IV.1)
(IV.2)
Les puissances actives et ractives transites par le rseau sont donnes dans le modle de
Park par les relations suivantes:
(IV.3)
(IV.4)
Figure IV.2 : Allure de la puissance
active P
Figure IV.3 : Allure de la puissance
ractive Q
Daprs la figure IV.2, la puissance active P est de la mme forme que celle de la vitesse de
rotation de la machine.
IV.3. Rgulation des puissances
Daprs lallure de la puissance active donne dans la figure IV.2, Nous avons constat
que celle-ci varie de la mme allure que la vitesse de rotation de la turbine. Ce qui mne dire
0 20 40 60 80 100 120
0
100
200
300
400
500
600
700
temps (s)
P
u
i
s
s
a
n
c
e
a
c
t
i
v
e
P
(
w
a
t
t
)
0 20 40 60 80 100 120
-20
0
20
40
60
80
100
120
140
160
temps (s)
P
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
56
que la puissance active obtenue dpend de la puissance olienne que reoit lolienne.
Ladaptation des quations (IV.3) et (IV.4) au systme daxes choisi et aux hypothses
simplificatrices effectues (
0) mne aux relations (IV.5) et (IV.6) [23].
(IV.5)
0 (IV.6)
Les relations (IV.1) et (IV.2) deviennent alors sous la forme suivante
(IV.7)
0
(IV.8)
Les quations de puissance deviennent
(IV.9)
(IV.10)
Introduisant des contrleurs de type PI pour la puissance active P et la puissance ractive Q,
le schma fonctionnel est prsent dans la figure IV.4.
Figure IV.4: Schma fonctionnel de la commande des puissances active et ractive [23]
PI
L
1
L
1
PI
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
57
Une fois que ce schma est mis en uvre, il faut dterminer les objectifs de notre
commande. Cest pourquoi nous allons dabord imposer une puissance active constante et une
puissance ractive nulle.
VI.3.1. La puissance active est maintenue constante
Dans ce qui suit on va commander la machine de sorte ce quune rfrence
soit
impose gale
et
0. Ainsi la puissance active sera lentre de la boucle de
rgulation du courant
, et Q lentre de la boucle de rgulation du courant
.
La simplification du schma de la figure IV.4 permet de calculer le rgulateur de la puissance
active (figure IV.5). Ce mme schma sera utilis pour calculer le rgulateur de puissance
ractive [27]
Figure IV.5 : Schma simplifi pour le calcul du rgulateur de puissance
VI.3.1.1. Rsultats de simulation pour la rgulation de puissance avec un rgulateur PI
Suite aux rsultats donns dans les figures IV.2, IV.3 et IV.4, nous avons effectu une
commande de la puissance active et ractive de la machine par un rgulateur PI, tel que la
puissance active P de rfrence est constante et gale la valeur nominale c..d. 600 watt.
La machine est considre larrt t=0 [28].
On pose les hypothses suivantes :
1- Q = 0
2-
600
3-
= 0
4-
= Vs = 90V
5-
= 0
Reg
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
58
Figure IV.6 : Allure de la puissance active
P pour une rfrence 600 watt
Figure IV.7 : Allure de la puissance
ractive Q pour une rfrence nulle
La figure IV. 6 reprsente lallure de la puissance active P obtenue laide dun rgulateur PI
pour une rfrence de 600 watt. La mme rgulation est effectue pour contrler la puissance
ractive pour laquelle la valeur de rfrence est nulle. On constate que la puissance ractive Q
est quasiment nulle.
Figure IV.8 : Allure du courant
Figure IV.9 : Allure du courant
La figure IV.8 reprsente lallure du courant
obtenu laide dun rgulateur PI pour une
rfrence nulle de la puissance ractive. La mme rgulation est effectue pour contrler le
courant
pour laquelle la valeur de rfrence est de
.
Le courant
est de la mme forme que la puissance active puisque cest celle-ci qui permet
de le calculer comme le montre le schma de commande de la figure IV.4.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
100
200
300
400
500
600
700
temps (s)
L
a
p
u
i
s
s
a
n
c
e
a
c
t
i
v
e
P
(
w
a
t
t
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
temps (s)
L
a
p
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
v
a
r
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x 10
-3
temps (s)
L
e
c
o
r
a
n
t
i
d
(
A
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
1
2
3
4
5
6
7
8
temps (s)
l
e
c
o
u
r
a
n
t
i
q
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
59
Figure IV.10 : Allure des tensions de phase Figure IV.11 : Allure des courants de phase
Daprs les figures IV.10 et IV.11, les tensions et les courants obtenus au niveau des trois
phases forment un systme triphas et sinusodal.
Daprs ces rsultats on voit bien que la machine donne une puissance constante malgr
les fluctuations dans la puissance olienne quelle reoit.
VI.3.1.2 Rsultats de simulation pour la rgulation de puissance avec un rgulateur IP
Figure IV.12 : Allure de la puissance
active P
Figure IV.13 : Allure de la puissance
ractive Q
Les figures IV.12 et IV.13, respectivement, reprsentent lallure de la puissance active et de la
puissance ractive Q obtenues laide dun rgulateur IP. On remarque que compar aux
rsultats obtenus avec le rgulateur PI, la puissance active P ne prsente aucun dpassement
mais atteint son rgime permanent plus lentement. Quant la puissance ractive Q, le rsultat
est meilleur avec un rgulateur IP.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps (s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-8
-6
-4
-2
0
2
4
6
8
temps (s)
i
a
r
e
f
,
i
b
r
e
f
,
i
c
r
e
f
(
A
)
0 10 20 30 40 50 60
0
100
200
300
400
500
600
700
temps (s)
L
a
p
u
i
s
s
a
n
c
e
a
c
t
i
v
e
P
(
w
a
t
t
)
0 10 20 30 40 50 60
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
le tmps(s)
l
a
p
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
60
Figure IV.14: Allure du courant
Figure IV.15 : Allure du courant
Les figures IV. 14 et IV. 15 reprsentent lallure du courant
et du courant
obtenus
laide dun rgulateur IP.
On constate que le courant
est de la mme forme que la puissance active et le courant
est pratiquement nul.
Figure IV.16 : Allure des tensions
des trois phases
Figure IV.17: Allure des courants
des trois phases
Les figures IV. 16 et IV.17 reprsentent lallure des tensions et des courants de phase de la
gnratrice.
Le changement du courant
apparait sur les courants des trois phases car ils voluent
proportionnellement.
0 10 20 30 40 50 60
0
1
2
3
4
5
6
7
temps (s)
L
e
c
o
u
r
a
n
t
i
q
(
A
)
0 10 20 30 40 50 60
0
0.005
0.01
0.015
0.02
0.025
temps (S)
L
e
c
o
u
r
a
n
t
i
d
(
A
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps(s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
0 2 4 6 8 10 12 14 16 18 20
-8
-6
-4
-2
0
2
4
6
8
temps (s)
i
a
r
e
f
,
i
b
r
e
f
,
i
c
r
e
f
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
61
VI.3.2. La puissance active varie avec le vent
VI.3.2.1. Rsultats de simulation pour la rgulation de puissance avec un rgulateur PI
Dans ce qui suit nous allons commander la machine de sorte ce que la rfrence
impose soit variable suivant la variation du vent avec une valeur maximale gale
600 , et
0.
Pour cela on pose les hypothses suivantes :
6- Q = 0
7-
= 0
8-
= Vs = 90V
9-
= 0
Figure IV.18 : Allure de la puissance
active et la puissance de rfrence
Figure IV.19 : Allure de la
puissance ractive Q
Les figures IV.18 et IV.19, respectivement, reprsentent lallure de la puissance active et de la
puissance ractive Q.
0 20 40 60 80 100 120
0
100
200
300
400
500
600
700
temps(s)
P
u
i
s
s
a
n
c
e
a
c
t
i
v
e
(
w
a
t
t
)
0 1 2 3 4 5 6 7 8 9 10
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
le temps(s)
l
a
p
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
(
V
A
R
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
62
Figure IV.20 : Allure du courant
Figure IV.21: Allure du courant
Les figures IV.20 et IV.21, respectivement, reprsentent lallure des courants
et
.
Figure IV.22 : Allure des tensions
des trois phases
Figure IV.23: Allure des courants
des trois phases
Comme on peut remarquer dans la figure IV.22, la machine vide fournie bien un systme de
tensions triphases sinusodales dune amplitude gale la tension de rfrence qui est
Vs=90V.
La figure IV.23 montre une variation de lamplitude des courants de phase due la variation
de celle de
.
0 20 40 60 80 100 120
-5
0
5
10
temps(s)
i
q
s
(
A
)
0 1 2 3 4 5 6 7 8 9 10
-5
-4
-3
-2
-1
0
1
2
3
4
5
x 10
-3
le temps(s)
l
e
c
o
u
r
a
n
t
i
d
(
A
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps (s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
0 1 2 3 4 5 6 7 8 9 10
-15
-10
-5
0
5
10
15
20
le temps(s)
l
e
s
c
o
u
r
a
n
t
s
d
e
p
h
a
s
e
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
63
VI.3.2.2. Rsultats de simulation pour la rgulation de puissance avec un rgulateur IP
Figure IV.24 : Allure de la puissance
ractive Q
Figure IV.25 : Allure de la puissance
active P
Les figures IV.24 et IV.25, respectivement, reprsentent lallure de la puissance active et de la
puissance ractive Q obtenues laide dun rgulateur IP.
Figure IV.26: Allure du courant
Figure IV.27 : Allure du courant
Les figures IV.26 et IV.27 reprsentent lallure du courant
et du courant
obtenus laide
dun rgulateur IP.
On constate que le courant
est de la mme forme que la puissance active et le courant
est pratiquement nul.
0 10 20 30 40 50 60
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
le tmps(s)
l
a
p
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
0 20 40 60 80 100 120
0
100
200
300
400
500
600
700
temps(s)
P
u
i
s
s
a
n
c
e
a
c
t
i
v
e
(
w
a
t
t
)
0 10 20 30 40 50 60
0
1
2
3
4
5
6
7
8
9
10
x 10
-5
le temps (s)
l
e
c
o
u
r
a
n
t
i
d
(
A
)
0 20 40 60 80 100 120
-5
0
5
10
temps(s)
i
q
s
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
64
Figure IV.28: Allure des tensions
des trois phases statoriques
Figure IV.29 : Allure des courants
des trois phases statoriques
Comme on peut remarquer dans la figure IV.28, la machine fournie bien un systme de
tensions triphases sinusodales dune amplitude gale la tension de rfrence qui est
Vs=90V.
La figure IV.29 montre une variation de lamplitude des courants de phase due la variation
de celle de
.
On remarque galement que les tensions de phase ne changent pas selon le rgulateur de
puissance utilis puisque la tension de rfrence qui permet de les calculer est impose
constante et gale 90V. Quand aux courants des trois phases, ils voluent suivant lvolution
du courant
et donc du vent.
VI.3.3. La puissance active varie suivant les besoins de lutilisation
VI.3.3.1. Rsultats de simulation pour la rgulation de puissance avec un rgulateur PI
Figure IV.30 : Allure de la
puissance active P
Figure IV.31 : Allure de la puissance
ractive Q
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-80
-60
-40
-20
0
20
40
60
80
100
le temps(s)
v
a
r
e
f
(
t
)
,
v
b
r
e
f
(
t
)
,
v
c
r
e
f
(
t
)
(
s
)
0 10 20 30 40 50 60
-6
-4
-2
0
2
4
6
le temps (s)
i
a
r
e
f
(
t
)
,
i
b
r
e
f
(
t
)
,
i
c
r
e
f
(
t
)
(
A
)
0 1 2 3 4 5 6 7
0
100
200
300
400
500
600
temps (s)
L
a
p
u
i
s
s
a
n
c
e
a
c
t
i
v
e
P
(
w
a
t
t
)
0 1 2 3 4 5 6 7
-12
-10
-8
-6
-4
-2
0
2
4
6
8
x 10
-3
temps (s)
L
a
p
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
65
Les figures IV.30 et IV.31, respectivement, reprsentent lallure de la puissance active et de la
puissance ractive Q obtenues laide dun rgulateur PI. La puissance ractive prsente des
fluctuations aux mmes instants que la puissance active.
Figure IV.32 : Allure du courant
Figure IV.33 : Allure du courant
Les figures IV.32 et IV.33 reprsentent lallure du courant
et du courant
obtenus laide
dun rgulateur PI.
On constate que le courant
est de la mme forme que la puissance active et le courant
est pratiquement nul.
Figure IV.34 : Allure des tensions
des trois phases statoriques
Figure IV.35 : Allure des courants
des trois phases statoriques
La figure IV.34 reprsente un systme de tensions triphases sinusodales dune amplitude
gale la tension de rfrence qui est Vs=90V.
0 1 2 3 4 5 6 7
-12
-10
-8
-6
-4
-2
0
2
4
6
8
x 10
-5
temps (s)
L
e
c
o
u
r
a
n
t
i
d
(
A
)
0 1 2 3 4 5 6 7
0
1
2
3
4
5
6
temps (s)
L
e
c
o
u
r
a
n
t
i
q
(
A
)
0 1 2 3 4 5 6 7
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps (s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
0 1 2 3 4 5 6 7
-6
-4
-2
0
2
4
6
temps (s)
i
a
r
e
f
,
i
b
r
e
f
,
i
c
r
e
f
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
66
La figure IV.35 montre une variation de lamplitude des courants de phase due la variation
de celle de
.
On remarque galement que les tensions et les courants de phase ne changent pas selon le
rgulateur de puissance utilis. Quand aux courants des trois phases, il voluent suivant
lvolution du courant
.
VI.3.3.2. Rsultats de simulation pour la rgulation de puissance avec un rgulateur IP
Figure IV.36 : Allure de la
puissance active P
Figure IV.37 : Allure de la puissance
ractive Q
Les figures IV.36 et IV.37, respectivement, reprsentent lallure de la puissance active et de la
puissance ractive Q obtenues laide dun rgulateur IP. Nous pouvons remarquer que
lallure de la puissance active est meilleure avec le rgulateur IP, mais la puissance ractive
prsente aussi des fluctuations.
Figure IV.38 : Allure du courant
Figure IV.39 : Allure du courant
0 1 2 3 4 5 6 7
0
100
200
300
400
500
600
temps (s)
P
u
i
s
s
a
n
c
e
a
c
t
i
v
e
P
(
w
a
t
t
)
0 1 2 3 4 5 6 7
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
x 10
-3
temps (s)
P
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
0 1 2 3 4 5 6 7
0
1
2
3
4
5
6
temps (s)
L
e
c
o
u
r
a
n
t
i
q
(
A
)
0 1 2 3 4 5 6 7
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x 10
-5
temps (s)
L
e
c
o
u
r
a
n
t
i
d
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
67
Les figures IV.38 et IV.39 reprsentent lallure du courant
et du courant
obtenus laide
dun rgulateur IP.
On constate que le courant
est de la mme forme que la puissance active et le courant
est pratiquement nul.
Figure IV.40 : Allure des tensions
des trois phases statoriques
Figure IV.41 : Allure des courants
des trois phases statoriques
La figure IV.40 reprsente un systme de tensions triphases sinusodales dune amplitude
gale la tension de rfrence qui est Vs=90V.
La figure IV.41 montre une variation de lamplitude des courants de phase due la variation
de celle de
.
On remarque galement que les tensions et les courants de phase ne changent pas selon le
rgulateur de puissance utilis. Quand aux courants des trois phases, il voluent suivant
lvolution du courant
.
VI.3.4. La puissance ractive est diffrente de zro
Jusque l on a tudi le comportement dun systme olien selon diffrentes commandes
de la puissance active, et o la puissance ractive Q a t maintenue gale zro. Parfois pour
des besoins spcifiques, il est ncessaire de fournir une puissance ractive diffrente de zro.
Pour cela on a choisi une valeur de la puissance ractive de rfrence
=100 VAR. On a
choisi dans premier temps une puissance active de rfrence
constante (voir VI.3.1), puis
variable en fonction de la variation de la vitesse du vent (voir VI.3.2).
0 1 2 3 4 5 6 7
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps (s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
0 1 2 3 4 5 6 7
-6
-4
-2
0
2
4
6
temps (s)
i
a
r
e
f
,
i
b
r
e
f
,
i
c
r
e
f
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
68
Figure IV.42 : Allure de la puissance
ractive pour
VAR et
constante
Figure IV.43 : Allure du courant
pour
VAR et
constante
La rfrence de la puissance ractive
=100 VAR a t atteinte grce la commande
dtaille dans la figure IV.4. Le courant
obtenu est donn par la figure IV.43.
Notons que la puissance active de rfrence
est maintenue constante.
Figure IV.44 : Allure de la puissance
pour
VAR
Figure IV.45 : Allure du courant
pour
VAR
Les figures IV.44 et IV.45 respectivement montrent lallure de la puissance ractive
et du
courant
obtenus dans le cas de la puissance active variable selon la vitesse du vent.
0 5 10 15 20 25 30
0
20
40
60
80
100
120
temps (s)
P
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
0 5 10 15 20 25 30
0
0.2
0.4
0.6
0.8
1
1.2
1.4
temps (s)
C
o
u
r
a
n
t
i
d
(
A
)
0 1 2 3 4 5 6 7 8 9 10
0
20
40
60
80
100
120
temps (s)
P
u
i
s
s
a
n
c
e
r
a
c
t
i
v
e
Q
(
V
A
R
)
0 1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1
1.2
1.4
temps (s)
C
o
u
r
a
n
t
i
d
(
A
)
Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive Chapitre IV Commande de la puissance active et ractive
69
Conclusion
Dans ce chapitre, nous avons tablit le schma de commande des puissances bas sur un
rgulateur PI puis sur un rglateur IP, afin de permettre le contrle de celles-ci selon les
objectifs recherchs.
Nous avons dans un premier temps impos une valeur constante de rfrence pour la
puissance active gale la valeur nominale que peut fournir la machine. Puis nous avons
effectu une commande qui permet dimposer une puissance active de rfrence variable
suivant les variations du vent. Pour viter davoir une nergie lectrique qui dpasse les
besoins de lutilisation o qui nest pas suffisante nous avons effectu une commande de la
puissance active o la puissance de rfrence a le mme profil que celle que demande la
charge alimente.
La puissance ractive a t annule afin dobtenir un fonctionnement facteur de
puissance unitaire. Mais le schma de commande de la figure VI.4 permet de fournir une
puissance ractive non nulle si besoin est.
Les rsultats de simulation montrent outre lefficacit du rgulateur utilis, le courant
qui suit la forme de la puissance active. De plus, le courant
est impos par la valeur de la
puissance ractive Q.
Ces rsultats ne sont pas non plus sans consquences sur les courants de phases fournis
par la machine. En effet si lamplitude de ceux-ci atteint la mme valeur si P est constante,
elle varie suivant les variation de cette dernire si elle est variable.
Chapitre Chapitre Chapitre Chapitre V VV V
Modlisation et commande des Modlisation et commande des Modlisation et commande des Modlisation et commande des
convertisseurs statiques convertisseurs statiques convertisseurs statiques convertisseurs statiques
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
70
V.1. Introduction
Aprs avoir transform lnergie olienne en nergie lectrique, il est ncessaire de
ladapter la charge quelle alimente ou le rseau au quel est connect notre systme de
production, car les oliennes sont considres comme des gnratrices de puissance variable.
Connectes sur un rseau lectrique, les gnrateurs oliens nimposent pas lamplitude de la
tension et ne rglent pas le rapport puissance -frquence, autrement dit, elles ne participent
pas aux services systmes, et donc perturbent dautant plus la stabilit des rseaux que leur
taux de pntration est important [21].
Avec lutilisation de lelectronique de puissance, de nouvelles technologies sont apparues
pour optimiser cette gnration dnergie.
Comme nous avons pu le constater dans le chapitre prcdent, la tension fournie par la
gnratrice subit des variations dues aux fluctuations dans la vitesse de rotation de celle-ci, en
fonction de la vitesse du vent. Ce qui entraine une variation de la puissance lectrique fournie
la charge alimente. De plus la forme et la frquence de la tension fournie ne sont pas
ncessairement adaptes la charge.
Pour remdier ces problmes, il est ncessaire de recourir llectronique de puissance
par lintermdiaire dun redresseur MLI et dun onduleur six bras command galement
par une commande MLI.
Nous allons dabord prsenter la commande MLI, puis le redresseur MLI en donnant
son modle mathmatique qui permet de le simuler sous MATLAB. Ensuite nous allons
dtailler le fonctionnement de londuleur MLI et son modle galement.
Enfin, nous allons terminer par donner les rsultats de simulation du schma global de la
chaine de conversion de lnergie olienne qui est donn par la figure (V.1)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
71
Figure V.1 : Le schma global de la chaine de conversion de lnergie olienne
V.2. La commande M.L.I
Le principe de la technique de modulation de largeur dimpulsion est bas sur la
comparaison dun signal dit la modulante et un autre dit la porteuse.
La technique choisie pour la commande de nos convertisseurs est la M.L.I sinus-triangle
car elle permet dliminer les harmoniques et lobtention dun bon rendement. Elle est base
sur la comparaison dun signal triangulaire de grande frquence et dun signal sinusodal de la
mme frquence que le signal de rfrence que lon souhaite obtenir. Le signal triangulaire est
appel la Porteuse et le signal sinusodal est appel la Modulante.
Ces signaux ont les proprits suivantes :
La modulante est une onde sinusodale
damplitude
et de frquence
.
La porteuse est une onde triangulaire ou en dents de scie
, damplitude
| , et dune frquence
.
Lindice de modulation
Le coefficient de rglage en tension r, qui est gal au rapport de lamplitude de la
tension de rfrence celle de la porteuse
Le principe de cette commande est que la valeur de la fonction F qui correspond la
premire cellule de commutation soit gale 1 si
sinon elle prend la valeur zro. La
valeur des autres fonctions se dduit facilement par la complmentarit qui existe entre deux
cellules dun mme bras et le dcalage de
pour deux phases qui se suivent [32].
MSAP
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
72
V.3. Modle du redresseur MLI
Avant de modliser le redresseur MLI, il est utile de rappeler quun redresseur est un
convertisseur statique. Il sert comme son nom lindique redresser un signal alternatif et le
transformer en un signal continu.
Pour ltude de lensemble (gnratrice - redresseur MLI onduleur - charge), on
sintressera uniquement au comportement dynamique des variables lectriques et
mcaniques de la machine [29].
Afin de faciliter la modlisation et rduire le temps de simulation, on modlise le
redresseur par un ensemble d'interrupteurs idaux: cest--dire rsistance nulle ltat
passant, rsistance infinie ltat bloqu, raction instantane aux signaux de commande (pas
dempitement).
Le redresseur MLI est compos de six bras, dont chacun comporte deux cellules de
commutation constitues dune diode et dun transistor en antiparallle. Cette structure permet
de passer le courant dans les deux sens.
Contrairement un redresseur diodes qui fournit une valeur de la tension gale celle de
la tension redresse (interrupteurs idaux), le redresseur MLI doit fournir une tension
constante quelque soit la tension produite par la gnratrice [39].
Pour le modle dynamique du systme, on va diviser ltude du convertisseur en trois
parties: le cot alternatif, la partie discontinue compose par les interrupteurs, et le ct
continu. Dans ce contexte, la fonction des interrupteurs est dtablir une liaison entre le ct
alternatif et le bus continu. Ces interrupteurs tant complmentaires, leur tat est dfini par la
fonction suivante
1,
1,
, ,
(V.1)
Les tensions de phase dentre et le courant de sortie peuvent tre crits en fonction des
fonctions
, de la tension redresse
et les courants dentre
0 (V.2)
Les tensions dentre entre phases du redresseur MLI peuvent tre dcrites par
(V.3)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
73
(V.4)
(V.5)
V.4. Modlisation du bus continu
Figure V.2 : Schma lectrique du bus continu
Le schma lectrique de la figure V.2 permet par la loi des mailles dtablir la relation
suivante :
(V.6)
(V.7)
: le courant de charge du condensateur.
: le courant ondul
: le courant redress
(V.8)
Avec :
: la valeur de la tension linstant initial t=0
Vu les fluctuations de la puissance fournie par la gnratrice, un rglage de la tension du
bus continu simpose via une boucle de rgulation avec un correcteur proportionnel intgral.
Le schma bloc de la commande est reprsent par la figure V.3 [27].
C
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
74
Les quations de tension pour le systme triphas quilibr sans raccordement neutre peuvent
tre crites de la faon suivante :
(V.9)
Avec :
3
.
(V.10)
3
.
(V.11)
3
.
(V.12)
Les quations prcdentes dans les coordonns dq sont :
. .
(V.13)
. .
(V.14)
Finalement, on dduit lquation de couplage entre ct alternatif et continu en fonction des
fonctions dtat des interrupteurs par :
(V.15)
: le courant de charge du redresseur.
En appliquant la transformation de park la relation V.12 on aboutit la relation V.13
. .
. .
. .
(V.16)
(V.17)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
75
Tout calcul fait, on obtient la relation V.15
1
6
2.
. cos
1
2
. sin
(V.18)
1
2
. cos
1
6
2.
. sin
(V.19)
V.5. Calcul de la tension du bus continu
Pour dterminer la valeur de la tension du bus continu ncessaire pour transiter une
puissance donne, on utilise un schma quivalent monophas simplifi de la liaison entre le
bus continu, londuleur et le rseau (en ngligeant la rsistance du filtre dentre). Pour cela,
londuleur et le rseau sont considrs comme des sources de tension monophases.
Figure V.3 : Le schma monophas simplifi de la liaison rseau
est la valeur efficace du fondamental de la tension module par londuleur, E est la valeur
efficace de la tension simple lentre du transformateur. X est limpdance monophase de
la self de lissage. On a reprsent sur la figure V.5 le diagramme vectoriel correspondant.
Figure V.4 : Le diagramme vectoriel des grandeurs lectriques en valeur crte
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
76
On peut donc exprimer, les puissances actives et ractives consommes du cot de londuleur
et au primaire du transformateur, en triphas. La puissance ractive envoye sur le rseau (au
primaire du transformateur)
3. . . (V.20)
Cette quantit peut tre exprime en fonction du dphasage entre E et
.. On considre la
projection du vecteur XI sur laxe port par E : X.I.sin. Cette dernire est quivalente la
quantit E-
.cos do lexpression de la puissance ractive donne par
3.
(V.21)
La puissance active sexprime par
3. . . (V.22)
Or la projection de X.I sur laxe perpendiculaire celui port par E : X.I.cos, scrit aussi
sous la forme
. do :
3. .
(V.23)
Pour lapplication considre, la vitesse de la machine est asservie de manire obtenir un
maximum de puissance extraite du vent. On dfinit le paramtre r, appel taux de modulation,
qui permet de caractriser la valeur efficace du fondamental de la tension module par
londuleur :
.
22
(V.24)
Pour dimensionner la tension du bus continu u, on introduit le paramtre
. . 22
(V.25)
On dduit
. .
Les puissances sont alors exprimes en fonction des paramtres selon
3.
. 1 . .
(V.26)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
77
3.
. . .
(V.27)
Or, pour le fonctionnement souhait puissance ractive nulle, on obtient partir de Q=0
. . 1 (V.28)
On abouti alors la relation suivante
3.
(V.29)
Afin de transfrer le maximum de puissance sur le rseau, le taux de modulation est unitaire.
Donc
1 ||
3.
(V.30)
Connaissant la puissance maximale fournie par notre olienne, on peut dterminer le
paramtre . A partir de ce paramtre et de la valeur efficace des tensions du rseau, on fixe la
valeur de la tension du bus continu correspondante.
V.6 Modlisation de londuleur
Un onduleur est un convertisseur statique qui permet de transformer un signal dentre
continu en un signal de sortie alternatif. Il a la mme structure que le redresseur MLI.
La commande des tats passant et bloqu des transistors permet dobtenir une tension
alternative caractrise par la frquence ncessaire pour la charge alimente. Le signal de
commande de ces derniers est fourni par la commande MLI [39].
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
78
Figure V.5 : Le schma global dun onduleur MLI
Soit les fonctions
qui reprsentent ltat des interrupteurs
La loi des mailles permet dobtenir les tensions composes entre phases
(V.31)
(V.32)
(V.33)
Si on suppose la charge quilibre, les tensions simples forment alors un systme triphas
quilibr
0 (V.34)
En combinant les quations (V.14), (V.15), (V.16), on obtient la relation
3
2 1 1
1 2 1
1 1 2
(V.35)
V.7. Rsultats de simulation
On a effectu dans un premier temps des simulations o les tensions de rfrence injectes
au redresseur MLI sont de forme sinusodale dans le but de tester le fonctionnement de
celui-ci ainsi que de londuleur MLI.
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
79
Figure V.6 : Allure de la tension redresse Figure V.7: Allure de la tension ondule
dune phase pour des tensions de rfrence
sinusodales
Figure V.8 : Allure des tensions de phase de rfrence
Daprs la figure V.6 on voit bien que la tension dalimentation du redresseur est
parfaitement redresse la sortie de celui-ci.
La figure V.7 reprsente la tension dune phase fournie par londuleur. On voit bien
lamplitude de 90V fournie par la gnratrice et la frquence de 5O Hz de londe de tension,
tandis que sur la figure V.8 la frquence des tensions de rfrence sont de 2,5Hz.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
50
55
60
65
70
75
80
85
90
95
temps(s)
l
a
t
e
n
s
i
o
n
r
e
d
r
e
s
s
e
(
v
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps(s)
l
a
t
e
n
s
i
o
n
o
n
d
u
l
e
(
V
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-80
-60
-40
-20
0
20
40
60
80
100
t(s)
v
a
r
e
f
,
v
b
r
e
f
,
v
c
r
e
f
(
V
)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
80
Figure V.9 : Allure de la tension ondule pour les tensions de rfrence fournies par la
gnratrice dans le cas dune puissance active qui varie selon le vent.
Dans le cas de la commande de la puissance active variable on a galement pu ramener la
frquence et lamplitude des tensions de phase aux valeurs qui correspondent nos besoins.
Les figures V.10, V.11 et V.12 montrent lallure et la frquence des tensions des trois phases,
et mettent en vidence le dcalage de
entre chaque deux phases successives.
Figure V.10 : Allure de la tension ondule de la phase a
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps(s)
l
a
t
e
n
s
i
o
n
o
n
d
u
l
e
(
V
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps(s)
l
a
t
e
n
s
i
o
n
o
n
d
u
l
e
d
e
l
a
p
h
a
s
e
a
(
V
)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
81
Figure V.11 : Allure de la tension ondule
de la phase b
Figure V.12 : Allure de la tension ondule
de la phase c
V.8. Contrle de la liaison au rseau
a - Contrle des courants par la commande du convertisseur de puissance
Londuleur MLI est situ entre le bus continu et le transformateur. La REM de
lensemble du modle continu quivalent et de la commande obtenue par inversion de la
liaison au rseau est donne sur la figure V.13.
Figure V.13 : REM du systme de commande du convertisseur du ct rseau [17].
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-100
-80
-60
-40
-20
0
20
40
60
80
100
l
a
t
e
n
s
i
o
n
o
n
d
u
l
e
d
e
l
a
p
h
a
s
e
b
(
V
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-100
-80
-60
-40
-20
0
20
40
60
80
100
temps(s)
l
a
t
e
n
s
i
o
n
o
n
d
u
l
e
d
e
l
a
p
h
a
s
e
c
(
V
)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
82
La topologie du convertisseur permet de gnrer et galement dappeler un courant
provenant du rseau. Cest notamment le cas lors de la phase de dmarrage durant laquelle le
condensateur doit tre charg. Lobjectif du convertisseur reli au rseau lectrique est de
maintenir la tension du bus continu constante quelque soit lamplitude et le sens de la
puissance.
Le convertisseur cot rseau a t command de manire contrler les courants transits
par le filtre. Un contrle vectoriel dans le repre de Park des courants a t ralis en utilisant
un repre synchronis avec les tensions du rseau.
A partir de la mesure de la tension du bus continu, le convertisseur est command de
manire imposer des rfrences aux tensions simples selon la relation inverse du modle
continu quivalent du convertisseur. Cette relation inverse est donne pour une rfrence un
point milieu fictif de la tension du bus continu :
.
2
(V.36)
.
2
(V.37)
Par rglage de ces deux tensions simples de rfrence, les composantes de Park des courants
sont rgules laide dun correcteur Poportionnel Intgral PI.[17]
b. Contrle des courants envoys au rseau
Le dispositif de commande des courants transits au rseau t obtenu partir de
linversion du modle de la liaison au rseau dans le repre de Park.
Il comprend trois actions spcifiques :
- Une compensation de la tension au secondaire du transformateur
(V.38)
(V.39)
- Une action de dcouplage des courants
(V.40)
(V.41)
(V.42)
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
83
: fem estime
: tension sur laxe d mesure
- Un contrle en boucle ferme des courants
(V.43)
(V.44)
: le contrleur de courant
c. Rgulation des puissances
Le dispositif de commande prcdemment expliqu permet dimposer gaux les courants
transits leurs rfrences. Cela entrane les puissances active et ractive transites
suivantes :
(V.45)
Figure V.14: Schma bloc du contrle des courants dans le repre de Park
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
84
(V.46)
Par inversion des relations il est alors possible dimposer des rfrences pour la puissance
active et ractive en imposant les courants de rfrence suivants :
(V.47)
(V.48)
La composante directe du courant est utilise pour rguler la tension du bus continu. Ce
dernier est contrl laide dun rgulateur (PI). La composante en quadrature est utilise
pour rguler la puissance ractive transite. Un contrle indpendant des puissances active et
ractive circulant entre le convertisseur et le rseau sera expliqu. Le systme de commande
doit permettre de maintenir constante la tension du bus continu, et dobtenir des courants
sinusodaux au primaire du transformateur damplitude et de frquence identiques celles du
rseau. Une puissance ractive nulle peut alors tre impose (
0).
Conclusion
Aprs avoir modlis le redresseur MLI et expliqu son principe de fonctionnement,
nous avons modlis galement londuleur de puissance.
Cette modlisation vient complter la chaine de production dj tudie. En suite nous
avons procd diffrentes simulations pour voire le comportement des convertisseurs
statiques utiliss et lefficacit de leur commande.
Nous avons donc simul le systme global dans le cas o aucune commande de puissance
nest faite, puis dans le cas de la commande de la puissance avec ses deux variantes
(puissance active constante et puissance active variable).
Les rsultats obtenus dans tous les cas montrent que quelques soient les tensions
dalimentation du redresseur, les tensions fournies la charge sont de la mme amplitude, de
la mme frquence et de forme quasi sinusodale.
Le contrle de la liaison au rseau passe par trois actions principales :
a - Contrle des courants par la commande du convertisseur de puissance
Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques Chapitre V Modlisation et simulation des convertisseurs statiques
85
b. Contrle des courants envoys au rseau
c - Rgulation des puissances
A partir de la mesure de la tension du bus continu, le convertisseur est command de
manire imposer des rfrences aux tensions simples selon la relation inverse du modle
continu quivalent du convertisseur par rglage de ces deux tensions simples de rfrence, les
composantes de Park des courants
,
sont rgules laide dun correcteur Poportionnel
Intgral PI.
Conclusion Gnrale Conclusion Gnrale Conclusion Gnrale Conclusion Gnrale
Conclusion gnrale Conclusion gnrale Conclusion gnrale Conclusion gnrale
86
Dans le cadre de la ralisation du mmoire de magister, nous avons choisi de travailler
sur le thme de la production et conversion de lnergie olienne. Pour cela, nous avons pris
pour objectif ltude et la simulation dune chaine de conversion olienne constitue dune
turbine de moyenne puissance (600 watts) associe une gnratrice synchrone aimants
permanents. Cet ensemble de conversion de lnergie olienne est complt par un dispositif
dlectronique de puissance afin de transmettre lnergie lectrique produite vers le rseau ou
la charge alimenter. Cette tude est complte par la mise en place des stratgies de
commande ncessaires au bon fonctionnement de chaque partie. .
Le premier chapitre a trait des gnralits sur lnergie olienne en rendant compte de
ltat actuel de lexploitation mondiale de ce crneau nergtique. Puis nous avons parl des
diffrents types doliennes existant avec leurs diffrentes structures savoir les oliennes
axe vertical et axe horizontal. Nous avons galement trait les lois fondamentales permettant
la conversion de lnergie olienne en nergie lectrique. Une comparaison entre les oliennes
vitesse variable et les oliennes vitesse fixe nous a permis de choisir un systme vitesse
variable. Puis la comparaison entre les diffrentes gnratrices utilises dans ce domaine nous
a permis de choisir de porter notre tude sur un systme bas sur une machine synchrone
aimants permanents MSAP.
Dans le chapitre deux, nous avons modlis le vent qui est la source principale dnergie.
Nous avons ensuite modlis la turbine olienne sur laquelle se base notre tude. Une
commande de la turbine, de sorte ce que le coefficient de puissance soit toujours optimal
quelques soient les variations du vent, a t effectue grce un rgulateur PI puis un
rgulateur IP afin de comparer les performances de chacun des deux. Quelques rsultats de
simulation ont t ensuite donns.
Le chapitre trois a t consacr la gnratrice synchrone aimants permanents. Nous
avons donn des exemples sur des machines diffrentes du point de vue structurel avant de
donner les quations lectriques, magntiques et mcanique rgissant la MSAP. Lcriture de
ces quations dans le repre de Park a t exploite pour effectuer la commande vectorielle
qui permet dassimiler la MSAP une machine courant continu excitation spare afin de
faciliter son tude et notamment sa simulation sous Matlab-Simulink.
Pour ce qui est du chapitre quatre, nous avons abord le problme li la puissance
lectrique produite par la gnratrice grce son entrainement par le vent. Nous avons labor
des stratgies de commande permettant datteindre plusieurs objectifs concernant la puissance
Conclusion gnrale Conclusion gnrale Conclusion gnrale Conclusion gnrale
87
active et la puissance ractive savoir une commande de la puissance active constante, puis
variable, et une commande de la puissance ractive gale zro.
Enfin, le dernier chapitre a t rserv ltude du redresseur MLI par la prsentation
de sa structure, son fonctionnement, ainsi que sa commande MLI. Cette structure
particulire du redresseur nous a permis davoir une tension parfaitement redresse quelque
soient les fluctuations du vent. Londuleur MLI a la mme structure que celle du redresseur
tudi et nous a permis dobtenir des tensions de phases de la frquence dsire.
Toutefois bien dautres questions mritent dtre abordes et dautre commandes dtre
testes. Ces questions pourraient constituer des perspectives pour enrichir ce travail. Nous
pouvons citer titre dexemple :
Lassociation dun systme de stockage dnergie, et un autre de compensation dans
le cas dune commande de puissance active constante.
Utiliser dautres commandes de la vitesse comme la commande robuste,
, logique
floueetc
Utiliser des rgulateurs de type fractionnaire la place des rgulateurs entiers.
Lutilisation dun onduleur multi niveaux afin dliminer plus dharmoniques.
Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne
Nombre de paires de ples p=17
Rsistance statorique Rs=1.137 ()
Inductance directe Ld=2.7e-3 (H)
Inductance transversale Lq=2.7e-3 (H)
Flux statorique
=0.15 (Wb)
Coefficient du couple kt=
*p (. .
)
Coefficient du frottement visqueux fm=0.06 (N.m.s/rad)
Coefficient dinertie de la machine Jm=0.1 (N.m)
Coefficient dinertie de la turbine Jt=16 (N.m)
Rayon de la turbine Rt=0.5 (m)
Hauteur de la turbine h=2 (m)
Masse volumique de l'air en kg.m-3, =1.225 (/
)
S. Belakehal*, A. Bentounsi, M. Merzoug et H. Benalla, << Modlisation et commande dune
gnratrice Synchrone aimants permanents ddie la conversion de lnergie olienne >>,
Laboratoire dElectrotechnique, LECFacult des Sciences de lIngnieur, Universit Mentouri
de Constantine, (reu le 14 Janvier 2010 accept le 28 Mars 2010).
Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne Paramtres de la chaine de conversion olienne
Paramtres des rgulateurs PI
Le rgulateur du courant
. .
193.29
Le rgulateur du courant
. .
27.28
Le rgulateur du couple lectromagntique
.
Paramtres des rgulateurs IP
Les rgulateurs utiliss dans la commande de la puissance active sont les mmes que ceux
utiliss pour la rgulation du courant
.
Les rgulateurs utiliss dans la commande de la puissance ractive sont les mmes que ceux
utiliss pour la rgulation du courant
.
Bibliographie Bibliographie Bibliographie Bibliographie
[1] O.Bouhali, << Contribution des convertisseurs multiniveaux au raccordement de la
production dorigine olienne sur un rseau lectrique >>, Thse de Doctorat en Gnie
Electrique, Ecole Nationale Polytechnique dAlger et Ecole Centrale de Lille, 17 Avril 2007.
[2] F. Poitier, << Etude et commande de gnratrice asynchrone pour lutilisation de lenergie
olienne Machine asynchrone cage autonome Machine asynchrone double
alimentation relie au rseau >>, thse de Doctorat dEtat en Electronique et Gnie
Electrique, Ecole Polytechnique de lUniversit de Nantes, 2003.
[3] O. Gergoud, << Modlisation nergtique et optimisation conomique dun systme de
production olien et photovoltaque coupl au rseau et associ un accumulateur >>, Thse
de Doctorat en Electrotechnique, Ecole Normale suprieure de Cachan, 2002.
[4] B. Boukhezzar, << Les stratgies de commande pour loptimisation et la rgulation de
puissance des oliennes vitesse variable >>, Thse de Doctorat en Sciences, Universit Paris
XI ORSAY, 2006.
[5] J. Ernst et W. Leonhard, << Optimisation of wind energy output of variable wind speed
turbine >>, Wind power 85, San Francisco, CA, 1985.
[6] T. Senjyu, N. Nakasone, A. Yona, A. Saber, T. Funabashi, H.Sekine, << Operation
strategies for stability of gearless wind power generation systems >>, IEEE conference,
Power and Energy Society General Meeting, Convertion and Delivery of Electrical Energy in
the 21
Century , pp 1-7 , 2008.
[7] P. Leconte, M. Rapin, E. Szechenyi, << Eolienne >>, Techniques de lIngnieur, BM 4640.
[8] A. Mirecki, << Etude comparative de chaines de conversion dnergie ddies une
olienne de petite puissance >>, Institut National Polytechnique de Toulouse, 2005.
[9] V. Courtesuisse, << Supervision dune centrale multisources base doliennes et de
stockage dnergie connecte au rseau lectrique >>, Thse de Doctorat en Gnie Electrique,
Ecole Nationale dArts et Mtiers, 2008.
Bibliographie Bibliographie Bibliographie Bibliographie
[10] M.Yin, G.Li, M. Zhou, C.Zhao, << Modeling of the wind turbine with a permanent
magnet synchronous generator for integration >>, Power Ingineering Society General
Meeting, June 2007, pp 1-6.
[11] J-C. Sabonnadire, << Nouvelles technologies de lnergie 1 >>, Lavoisier, 2006.
[12] M.Crappe, << Commande et rgulation des rseaux lectriques >>, Lavoisier, 2003.
[13] A. Abdelli, << Optimisation Multicritres dune chaine olienne passive >>, Thse de
Doctorat en Electrotechniques, Institut National Polytechnique de Toulouse, 2007.
[14] A. Boyette, << Contrle commande dun gnrateur asynchrone double alimentation
avec systme de stockage pour la production olienne >>, Thse de Doctorat en Gnie
Electrique, Universit Henri Poincar, Nancy I, 2006.
[15] Nicolas Laverdure, << Sur lintgration des gnrateurs oliens dans les rseaux faibles
ou insulaires >>, Thse de Doctorat, lINPG, Gnie Electrique, 2005.
[16] B. Robyns, A. Davigny, C. Saudemont, A. Ansel, V. Courtecuisse, << Impacte de
lolien sur le rseau de transport et la qualit dnergie >>, J3eA, Vol.5-Hors srie I, 2006.
[17] S. El Aimani, << Modlisation de diffrentes technologies doliennes intgres dans un
rseau de moyenne tension >>, Thse de Doctorat dEtat en Electronique et Gnie Electrique.
Ecole Centrale de Lille (ECL), 2005.
[18] R. Melicio, V.M.F. Mendes, J.P.S. Catalao, << Computer simulation of wind power
systems: Power Electronics and Transient Stability Analysis >>, International Conference on
Power System Transients (IPST 2009), Kyoto, Japan, Juin 3-6, 2009.
[19] X. Zuoxia, Y.Xingja, << Research of double fed variable speed wind turbine power
output performances >>, ICIEA 2007 2
IEEE Conference on Industrial Electronics and
Applications, 23-25 May, 2007, China, pp.1378-1383.
[20] O.Gergaud, B. Multon, H.Ben Ahmed, << Modlisation dune chaine de conversion
olienne >>, Electronique du Futur, 2001, pp.17-22. Nancy, Novembre 2001.
Bibliographie Bibliographie Bibliographie Bibliographie
[21] S.M. Muyeen, R. Takahashi, T. Murata, J. Tamurata et M.H.Ali, << Transient stability
analisis of permanent magnet variable speed synchronous wind generator >>, Proceeding of
international conference on electrical machines and systems, Oct 8-11, 2007, Seoul, Korea.
[22] K. Ghedamsi and all, << Control of wind generator associated to a flywheel energy
storage system >>, Renewable Energy 33(2008) 2145-2156.
[23] G. Sturzer, E. Smigiel, << Modlisation et commande des machines triphases >>,
Edition Ellipse, Mars 2000.
[24] A. Abdini, A. Nasiri, << PMSG Wind Turbine Performances Analysis During Short
Circuit s >>, IEEE Canada Electrical Conference, pp.165, Juin 2007.
[25] F.Barret, << Rgimes transitoirs des machines tournantes lectriques >>, Editions
Eyrolles, 1987.
[26] F.S. Dos Reis, << Active shunt filter for harmonic mitigation in wind turbines
generators>>, 37
th
IEEE Power Electronic Specialists Conference, Juin 18-22, 2006, Jeju,
Korea.
[27] F. Liu, X. Zhang, Z. Xie, P. Xu, L. Chang, << Schunt active power filter for harmonic
and reactive current in wind conversion systems >>, Power electronics specialists conference,
2008, PESC 2008, IEEE, pp.2329-2332.
[28] A. Davigny, << Participation aux services systme de fermes oliennes vitesse variable
integrant du stockage inertiel >>, Thse de Doctorat, Universit des Sciences et Technologies
de Lille, 2007.
[29] J. Larouche, << Cours et exercices corrigs >>, Livre de llectronique de puissance et
des convertisseurs, Lyce E. Belin de Visoul 2003.
[30] J.P. Louis, << Modles pour la commande des actionneurs lectriques >>, EGEM,
Lavoisier, 2004.
[31] G. Grellet, G. Clerc, << Actionneurs lectriques >>, Editions Eyrolles, 1997.
Bibliographie Bibliographie Bibliographie Bibliographie
[32] G. Seguier, F. Labrique, << Les convertisseurs de llectronique de puissance >>,
Edition Lavoisier, Tech and Doc, 1998, tome 1 et tome 4.
[33] G. Cimuca, << Systme inertiel de stockage dnergie associs des gnrateurs
oliens >>, Thse de Doctorat en Gnie Electrique, Ecole Nationale Suprieure dArts et
Mtiers, 2005.
[34] Y. Madi, << Etude des onduleurs multiniveaux dans les chaines de production dnergie
olienne >>, Mmoire de Magister en Electrotechnique, Universit Abderrahmane Mira-
Bejaa, 2009.
[35] M.E. Haque, K.M. Mattaqui, M. Negnevitsky, << Control of stand alone variable speed
wind turbine with a permanent magnet synchronous generator >>, Power and Energy Society
General Meeting-Conversion and Delivery of Electrical Energy in 21
Century, pp.1-9, 2008.
[36] h. Camblong, << Minimisation de limpact des perturbations dorigine olienne dans la
gnration de llectricit par des arognrateurs vitesse variable >>, Thse de Doctorat
dEtat en Automatique, Ecole Nationale Suprieure dArts et Mtiers, 2003.
[37] Y. Yong, << Grid-connected inverter for wind power generation system >>, Shanghai
University (Engl Ed), 2009.
[38] Y. Jiang, M.F. Rong, L. Hua, <<Variable speed constant frequency tidal current energy
generation and control strategy for maximum power point tracking and grid connection>>,
Sustainable Power Generation and supply, 2009 Supergen 09, International Conference,
pp.16.
[39]. M. Chinchilla, J.C. Burgos, << Control of permanent magnet generator applied to
variable speed wind energy systems connected to the grid >>, IEEE Transactions on energy
conversion, Vol 1, pp.130-135, March 2006.
[40] S. Bolkhrachef, << Analyse et contrle de londuleur de tension cinq niveaux
structure NPC. Application la commande floue de la machine asynchrone >>, Mmoire de
Magister, Ecole Nationale Suprieure Polytechnique, Alger, May 2001.
Bibliographie Bibliographie Bibliographie Bibliographie
[41] R. Chibani, << Application de lautomatique aux cascades onduleurs cinq niveaux
structure NPC >>, Thse de Doctorat, Ecole Nationale Polytechnique, Alger, 2007.
[42] E. Berkouk, << Contribution la conduite des machines asynchrones monophases et
triphases alimentes par des convertisseurs directs et indirects. Application aux gradateurs et
onduleurs multiniveaux >>, Thse de Doctorat du Conservatoire National des Arts et Mtiers,
Paris, Dcembre 1995.
[43] M. Franchia, T. Ghiara et all, << Optimized modulation technics for the generalized N
level converter >>, Power Electronics Specialists conference PESC 92, Vol 1.2, 1992.
[44] J.S. Lai, F.Z. Peng, << Multilevel converter A new breed of power converters >>,
IEEE Transaction on Industry Application, Vol 32,
3, pp. 509-517, May/June 1996.
Rsum Rsum Rsum Rsum ...
Dans ce travail, nous tudions la modlisation et la commande dune gnratrice syn-
chrone aimants permanents attaque directe associe une chane de conversion dnergie
olienne de petite taille en site isol. Le systme propos dbite travers un redresseur MLI et
un onduleur MLI. Nous allons galement tudier des stratgies de commande permettant
loptimisation de lnergie extraite par la turbine ainsi que des contrleurs permettant de
commander la puissance lectrique fournie au rseau. Les rsultats des diffrentes simulations
de toute la chane de conversion, ralises sous environnement MATLAB/Simulink, ont per-
mis dvaluer les performances du systme propos.
Mots cls: Eolienne - Gnratrice synchrone aimants permanents - Modlisation - Redres-
seur MLI- onduleur MLI rgulateur PI rgulateur IP.
You might also like
- 537f32a914ddc PDFDocument56 pages537f32a914ddc PDFMohamed SomaiNo ratings yet
- Vue en Plan Format A0Document1 pageVue en Plan Format A0NZOKOU ABAGHA VIVIENNo ratings yet
- ChronostratChart2021 05frenchDocument1 pageChronostratChart2021 05frenchimanNo ratings yet
- Principes de Conception Des Systèmes Electroniques - TD4Document3 pagesPrincipes de Conception Des Systèmes Electroniques - TD4Jaouad BaihaNo ratings yet
- Charte Chronostratigraphique InternationaleDocument1 pageCharte Chronostratigraphique InternationalehajlaouiNo ratings yet
- TI Pompes Rotodynamique Problèmes Mécanique 42173210-b4306Document19 pagesTI Pompes Rotodynamique Problèmes Mécanique 42173210-b4306FLASNo ratings yet
- Vocabulaire Anglais VoyageDocument5 pagesVocabulaire Anglais VoyageGerald BarbesangeNo ratings yet
- Plan 2010 Canet en RoussillonDocument2 pagesPlan 2010 Canet en RoussillonCanetTourismeNo ratings yet
- CE1 ExoSup9Document3 pagesCE1 ExoSup9Antoine FragonardNo ratings yet
- Plan de Ligne - Busratp - Ligne 421Document1 pagePlan de Ligne - Busratp - Ligne 421lukresseplNo ratings yet
- A0 Sotraco Bobo VFDocument1 pageA0 Sotraco Bobo VFlyzoescobarNo ratings yet
- Fiche-Horaire Tram Ligne-T3a.1657181748Document2 pagesFiche-Horaire Tram Ligne-T3a.1657181748DvNo ratings yet
- M2 T2 T1e: Desde: From: Ab: Des deDocument4 pagesM2 T2 T1e: Desde: From: Ab: Des deCafè DiversitatNo ratings yet
- IR Semi Marathon-2024Document2 pagesIR Semi Marathon-2024b628644No ratings yet
- France Dimanche 22 D 233 Cembre 2017Document52 pagesFrance Dimanche 22 D 233 Cembre 2017Lyudmila SilenokNo ratings yet
- Chapitre 01Document14 pagesChapitre 01Salah SalouhNo ratings yet
- 1 PrésentationDocument1 page1 Présentationobambigael2023No ratings yet
- CNC MP Physique1 2008corrigeDocument10 pagesCNC MP Physique1 2008corrigeJean Bedel Bekanfa GNAMIENNo ratings yet
- Dupli Ez300 370Document2 pagesDupli Ez300 370khalid.chinoisNo ratings yet
- 4-Plan de Reconnaissance Géotechnique - 1Document1 page4-Plan de Reconnaissance Géotechnique - 1Kina BouhafsNo ratings yet
- Ouest France 2023 05Document56 pagesOuest France 2023 05Doc TraductionNo ratings yet
- Chapitre 7 - Synthèse FréquentielleDocument13 pagesChapitre 7 - Synthèse FréquentielleomarchrifNo ratings yet
- CNL Adaptative MSAPDocument71 pagesCNL Adaptative MSAPhvhvyNo ratings yet
- Lignes Aériennes - EntretienDocument14 pagesLignes Aériennes - EntretienLewis Mbua100% (1)
- Fronius CMTDocument16 pagesFronius CMTdinar abdellahNo ratings yet
- Toutes Nos Formations Informatiques Éligibles Au CPFDocument19 pagesToutes Nos Formations Informatiques Éligibles Au CPFGédéon OndeleNo ratings yet
- Clio1.5dci 1Document45 pagesClio1.5dci 1hallierNo ratings yet
- Construire Une Terrasse de Plain-PiedDocument3 pagesConstruire Une Terrasse de Plain-PiedFarid TataNo ratings yet
- Infographie Innovations Technologies Propres Ecotech Quebec Efficacite EnergetiqueDocument2 pagesInfographie Innovations Technologies Propres Ecotech Quebec Efficacite EnergetiqueBoukmouche NawalNo ratings yet
- BWH Auditorium Plan New 2018 Seat DescriptionsDocument1 pageBWH Auditorium Plan New 2018 Seat DescriptionsRitikaNo ratings yet
- Plan Circulation Rugby 31082023Document1 pagePlan Circulation Rugby 31082023adrienbertois13No ratings yet
- Plan VMCVDocument1 pagePlan VMCVterrescapeNo ratings yet
- Depliant KastingDocument2 pagesDepliant Kastingherve HENRYNo ratings yet
- TI AM Caractéristiques Des Mobiles D AgitationDocument16 pagesTI AM Caractéristiques Des Mobiles D AgitationVictor HugoNo ratings yet
- MOUSSAOUI YASSER Automatique.. Automatique Et Informatique IndustrielleDocument104 pagesMOUSSAOUI YASSER Automatique.. Automatique Et Informatique Industriellebelgrinatmostapha95No ratings yet
- Ravaux Irigés: Exercice 1Document10 pagesRavaux Irigés: Exercice 1imane ElarouiNo ratings yet
- A30050 X6035 A100 7511Document6 pagesA30050 X6035 A100 7511Oleg Kuryan0% (1)
- B5310 Critères de Choix D'un Palier. ValidationDocument35 pagesB5310 Critères de Choix D'un Palier. ValidationRamzi hammamiNo ratings yet
- 2013 AUT UrbanitéDocument92 pages2013 AUT UrbanitéRé ChhemNo ratings yet
- Exam Ratt Fonderie 15 MinDocument2 pagesExam Ratt Fonderie 15 Minzyad l-fNo ratings yet
- Cod GLPM Manono A3l 20190703Document1 pageCod GLPM Manono A3l 20190703josué uzjNo ratings yet
- L3 ElmDocument4 pagesL3 Elmrb29rvcc84No ratings yet
- Dtu 2541Document7 pagesDtu 2541Mohamed BensoulaNo ratings yet
- Gaouaoui MohammedDocument146 pagesGaouaoui MohammedJabir SamadiNo ratings yet
- Ligne C6-À Partir Du 2 Janvier 2023Document5 pagesLigne C6-À Partir Du 2 Janvier 2023DavidNo ratings yet
- Catalogue Inserts Conv FR D00600 V6!10!2015Document18 pagesCatalogue Inserts Conv FR D00600 V6!10!2015fricou fuzierNo ratings yet
- 2003 Ec MC SM Partlist PDFDocument126 pages2003 Ec MC SM Partlist PDFPablo garces espinNo ratings yet
- Guide de Lurgence Sociale Au Havre 2022 0Document2 pagesGuide de Lurgence Sociale Au Havre 2022 0najouhasouadNo ratings yet
- Vsa 90-110Document82 pagesVsa 90-110paati academyNo ratings yet
- 12 Wa600 - 20-801 T PDFDocument34 pages12 Wa600 - 20-801 T PDFNacer NacerNo ratings yet
- 1-Principes Generaux de CorrectionDocument15 pages1-Principes Generaux de CorrectionMed MaxNo ratings yet
- Centre: LégendeDocument2 pagesCentre: LégendeViso del Marqués MediaNo ratings yet
- Decoupages Electoraux Grenoble B0Document1 pageDecoupages Electoraux Grenoble B0David BousquetNo ratings yet
- STARTER V451 Conditions MarginalesDocument5 pagesSTARTER V451 Conditions MarginalesseregeNo ratings yet
- Carte Contraintes Dacces Province Nord-Kivu Territoires Walikale Masisi Lubero Rutshuru 20201019Document1 pageCarte Contraintes Dacces Province Nord-Kivu Territoires Walikale Masisi Lubero Rutshuru 20201019Abu FayedNo ratings yet
- Web (Fiche) SolanaceesDocument6 pagesWeb (Fiche) SolanaceesMaheritianaSitrakaAndrianorojaonaNo ratings yet
- Chapitre 1 - Structure Des Entités ChimiquesDocument8 pagesChapitre 1 - Structure Des Entités ChimiqueslamloumiNo ratings yet
- Tour de France: Comment Accéder À Cauterets ?Document2 pagesTour de France: Comment Accéder À Cauterets ?France3AlsaceNo ratings yet
- Vocabulaire de la création d'entreprise par essaimage: incluant la terminologie élémentaire de la restructuration par scissionFrom EverandVocabulaire de la création d'entreprise par essaimage: incluant la terminologie élémentaire de la restructuration par scissionNo ratings yet
- CatalogoNagares2011 PDFDocument46 pagesCatalogoNagares2011 PDFRanieri BenčićNo ratings yet
- Fiches Dorganisation Semestrielle Des Enseignements de La Specialite Master 1 Ressources Hydrauliques s2 2018 2019Document24 pagesFiches Dorganisation Semestrielle Des Enseignements de La Specialite Master 1 Ressources Hydrauliques s2 2018 2019Rie NaNo ratings yet
- Zagame CFE Dec 08Document37 pagesZagame CFE Dec 08Idelphonse SALIOUNo ratings yet
- ELECTRONIQUEDocument2 pagesELECTRONIQUEMEHDI BR100% (1)
- NormesDocument4 pagesNormesNina HanNo ratings yet
- Entrepreneuriat Chap-2 Formes-EntrepreneurialesDocument11 pagesEntrepreneuriat Chap-2 Formes-EntrepreneurialesNahed NasriNo ratings yet
- DCG 7 Management Manuel Et Application 2020Document420 pagesDCG 7 Management Manuel Et Application 2020badr rahiouiNo ratings yet
- s1-A1-Compléter Une Carte Mentale Et Texte À TrousDocument3 pagess1-A1-Compléter Une Carte Mentale Et Texte À TrouspapoumsNo ratings yet
- Marketing Mix Travail A FaireDocument10 pagesMarketing Mix Travail A FaireLyna BouattouraNo ratings yet
- Relevee 1689005694140Document1 pageRelevee 1689005694140Med yahyaNo ratings yet
- CoursDocument26 pagesCoursSiham VolubilisNo ratings yet
- Facture Word 4Document1 pageFacture Word 4didier amoussouNo ratings yet
- HTTPSWWW - Sbb.chfracheterbelegbillett WebonlineTicket PDFDocument2 pagesHTTPSWWW - Sbb.chfracheterbelegbillett WebonlineTicket PDFISMAIL ISMAIL.ALMDGNo ratings yet
- Rapport de Stage 2021Document19 pagesRapport de Stage 2021Yogbake HansNo ratings yet
- Application Coût TransportDocument1 pageApplication Coût TransportFatima-Ezzahrae BAZNo ratings yet
- New Text DocumentDocument59 pagesNew Text DocumentMarcus OlivieraaNo ratings yet
- Fiche Candidature Occitanie LRDocument8 pagesFiche Candidature Occitanie LRagulhonNo ratings yet
- Ooreka Fiche Evaluation StagiaireDocument5 pagesOoreka Fiche Evaluation StagiaireZiad MerjaneNo ratings yet
- Les Commandes Fondamentales de LinuxDocument27 pagesLes Commandes Fondamentales de LinuxBrunel MALONGANo ratings yet
- Brochure ESGF Octobre 2015Document24 pagesBrochure ESGF Octobre 2015Cricri AduNo ratings yet
- Norme 9000 Et 10012Document6 pagesNorme 9000 Et 10012HOUDANo ratings yet
- Production de Documents Audio-NumériquesDocument15 pagesProduction de Documents Audio-NumériquesBelalia100% (1)
- Programme de Formation Approches Agile Et ScrumDocument5 pagesProgramme de Formation Approches Agile Et ScrumMohamed Anouar FarsiNo ratings yet
- Anglais Chez À Domicile Tradexpert TeamDocument13 pagesAnglais Chez À Domicile Tradexpert TeamTradexpert TeamNo ratings yet
- TD Sig Ig3 - Part3Document3 pagesTD Sig Ig3 - Part3sifer mohamedNo ratings yet
- Tenseur de Contraintes PDFDocument31 pagesTenseur de Contraintes PDFDeghboudj Samir88% (8)
- Chap1 OCLDocument28 pagesChap1 OCLNourElhoudaNo ratings yet
- ICVSuppliersDocument498 pagesICVSuppliersMohd Abdul Mujeeb100% (1)
- Exercices HacheurDocument2 pagesExercices Hacheuraicha elmamouniNo ratings yet
- Chapitre 2Document15 pagesChapitre 2Septime Romarik TagnonNo ratings yet