You might also like
- Estructura Externa e Interna de Los PLCDocument7 pagesEstructura Externa e Interna de Los PLCYair Cardenas RicoNo ratings yet
- Unit 2 - Clasificacion Por Estructura PLCDocument26 pagesUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNo ratings yet
- Conexion Hmi DopsoftDocument15 pagesConexion Hmi DopsoftSebastian Cavieres0% (1)
- Ejercicios LABVIEW BasicosDocument9 pagesEjercicios LABVIEW BasicosAnonymous LaDHTPXNo ratings yet
- Instrumentación Problemas PIDocument16 pagesInstrumentación Problemas PILc CaraveoNo ratings yet
- Sistema Calefaccion Pid - ProteusDocument12 pagesSistema Calefaccion Pid - ProteusSnaider Mendoza VillegasNo ratings yet
- ControlPosiciónMotorDCDocument2 pagesControlPosiciónMotorDCHosworh Hernandez Avila100% (1)
- Informe Proyecto Control Digital PDFDocument9 pagesInforme Proyecto Control Digital PDFJose Moreno100% (1)
- Proyecto de Control AnalogoDocument24 pagesProyecto de Control AnalogoMónik TelloNo ratings yet
- Graficas Banda ProporcionalDocument18 pagesGraficas Banda ProporcionalMarcos JimenezNo ratings yet
- Norma IEC-1131-1Document6 pagesNorma IEC-1131-1alejo662007100% (6)
- Laboratorio #04 Programación de PLC Micrologix 1100 Serie BDocument17 pagesLaboratorio #04 Programación de PLC Micrologix 1100 Serie BAnthony Joseph Flores Obando100% (1)
- Cuestionario CONTROLADORESDocument5 pagesCuestionario CONTROLADORESAbezaid Gamez100% (1)
- Sensores Transductores y ActuadoresDocument90 pagesSensores Transductores y ActuadoresKatherine Llerena CalderónNo ratings yet
- Diseño de Un Controlador PID Difuso para Una Planta de Segundo Orden Sub-Amortiguada Usando LABVIEWDocument52 pagesDiseño de Un Controlador PID Difuso para Una Planta de Segundo Orden Sub-Amortiguada Usando LABVIEWcss_unac100% (2)
- Análisis de LGR y Diseño de CompensadorDocument17 pagesAnálisis de LGR y Diseño de CompensadorGerman CorreaNo ratings yet
- Controlador PID: qué es, componentes y aplicaciones del sistema de control más precisoDocument10 pagesControlador PID: qué es, componentes y aplicaciones del sistema de control más precisoFiliberto Tlalpa ValdezNo ratings yet
- Matriz JacobianaDocument30 pagesMatriz JacobianaEmmanuel Marin VicenteNo ratings yet
- Estabilidad de LyapunovDocument32 pagesEstabilidad de LyapunovRaul Negron GodoyNo ratings yet
- Redes de Comunicación IndustrialDocument16 pagesRedes de Comunicación IndustrialHerberth MüllerNo ratings yet
- Control Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo OrdenDocument30 pagesControl Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo Ordencss_unac100% (1)
- Ejemplos de Control Pid en La Industría QuímicaDocument8 pagesEjemplos de Control Pid en La Industría QuímicaTania100% (1)
- Scada PresentacionDocument24 pagesScada PresentacionjoapmeNo ratings yet
- Clase base, clase derivadaDocument16 pagesClase base, clase derivadaPorque92No ratings yet
- Definicion Sistema MecatronicoDocument4 pagesDefinicion Sistema MecatronicoCarlos Ruiz100% (3)
- Controlador PIDDocument43 pagesControlador PIDTathilita gamer0% (1)
- Labview EjerciciosDocument19 pagesLabview EjerciciosjulpaiNo ratings yet
- Entradas Salidas DiscretasDocument13 pagesEntradas Salidas DiscretasMijael Ramos Barrientos100% (1)
- Diseño de control PID para sistemas de automatizaciónDocument13 pagesDiseño de control PID para sistemas de automatizaciónMaría Garrigós100% (1)
- EXA2G3OI PdfcreatorDocument38 pagesEXA2G3OI PdfcreatorTomas Sanchez TronoNo ratings yet
- Practica10 LCA1 ScilabDocument12 pagesPractica10 LCA1 Scilabroyer999No ratings yet
- Práctica 5 Laboratorio de Potencia, Detector Cruce Por Cero.Document12 pagesPráctica 5 Laboratorio de Potencia, Detector Cruce Por Cero.Jorfel AdonayNo ratings yet
- Control Pid Con Amplificadores OperacionalesDocument14 pagesControl Pid Con Amplificadores OperacionalesFernando GuamánNo ratings yet
- Proyecto PIDDocument16 pagesProyecto PIDLuis Israel Quinga AcostaNo ratings yet
- 7 Ejemplos GrafcetDocument4 pages7 Ejemplos GrafcetYael RiveroNo ratings yet
- Proyecto Invernadero Por PIDDocument21 pagesProyecto Invernadero Por PIDMaleny Ariass0% (1)
- Controlador Pid para El Control de Posicion de Un Motorreductor DCDocument8 pagesControlador Pid para El Control de Posicion de Un Motorreductor DCElias VelezNo ratings yet
- Unidad 5 PLCDocument24 pagesUnidad 5 PLCSergio Buenaventura Baez0% (1)
- PLC PID ControlDocument26 pagesPLC PID ControlBruno Eduardo Reyes BarralesNo ratings yet
- Lab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPDocument11 pagesLab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPOmar Ruiz Rodríguez100% (2)
- Tarea 4 Control DigitalDocument6 pagesTarea 4 Control DigitalAldo CarrilloNo ratings yet
- Conclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Document12 pagesConclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Francisco RomeroNo ratings yet
- Informe Controladores PidDocument20 pagesInforme Controladores Pidgeorge elio elmerNo ratings yet
- Proyecto Final de ControlDocument6 pagesProyecto Final de ControlAndres FelipeNo ratings yet
- Foro 2 AutomatizacionDocument3 pagesForo 2 AutomatizacionMartin Fabian Sarmiento GaviriaNo ratings yet
- Trabajo PIDDocument25 pagesTrabajo PIDVictor Farias GuerreroNo ratings yet
- Control de Llenado y Vaciado de Un Tanque de Agua Mediante Un Sistema EléctricoDocument10 pagesControl de Llenado y Vaciado de Un Tanque de Agua Mediante Un Sistema EléctricoJaime Luis Varas ArandaNo ratings yet
- CompensadoresDocument22 pagesCompensadoresEduardo RodriguezNo ratings yet
- Practica 4 Con Pic18f4550 ADC (Conversión de Análogo A Digital)Document2 pagesPractica 4 Con Pic18f4550 ADC (Conversión de Análogo A Digital)Alex CalderonNo ratings yet
- Control Fuzzy PID de Una Planta de TemperaturaDocument2 pagesControl Fuzzy PID de Una Planta de TemperaturawilithNo ratings yet
- Rectificador controlado de silicio SCR: características y funcionamientoDocument12 pagesRectificador controlado de silicio SCR: características y funcionamientoAndy Guzmán Gomez100% (1)
- Sistemas de ControlDocument21 pagesSistemas de Controlsaint1386No ratings yet
- Control de temperatura con PIDDocument30 pagesControl de temperatura con PIDAlejandro LeonNo ratings yet
- Aplicaciones de Controladores PID para Motores de Corriente ContinuaDocument5 pagesAplicaciones de Controladores PID para Motores de Corriente ContinuacarrizocristiandNo ratings yet
- Control PID-Explicación del algoritmo PID para control de procesosDocument9 pagesControl PID-Explicación del algoritmo PID para control de procesosDavid Garza HipolitoNo ratings yet
- Control PID de Un HornoDocument4 pagesControl PID de Un HornoFabian Condor0% (1)
- Control PID: Conceptos, ventajas y aplicaciones industrialesDocument16 pagesControl PID: Conceptos, ventajas y aplicaciones industrialesG4Z JorgeFloridoNo ratings yet
- Practica 5 Sintonía de Los ControladoresDocument29 pagesPractica 5 Sintonía de Los ControladoresJaneth ReyesNo ratings yet
- Sist - Control 01T ProyectoFinalDocument15 pagesSist - Control 01T ProyectoFinalMarcelo Saldarriaga Rivera100% (1)
- Exa3 Lab12 Final PDFDocument9 pagesExa3 Lab12 Final PDFJorge Enrique Laos PintoNo ratings yet
- Grúa-Operador-RiggerDocument5 pagesGrúa-Operador-RiggerRodrigo Andres Heredia GarcésNo ratings yet
- Paper Elevador de VehículosDocument9 pagesPaper Elevador de VehículosRodrigo Andres Heredia GarcésNo ratings yet
- 001302217-an-01-es-SOFTWARE LOGO STARTER KIT 230RCE PDFDocument394 pages001302217-an-01-es-SOFTWARE LOGO STARTER KIT 230RCE PDFRonald Vidaurre SandovalNo ratings yet
- LCH-Procesos laminado acero calienteDocument13 pagesLCH-Procesos laminado acero calienteEdson AbelNo ratings yet
- Asm Pic16f877Document140 pagesAsm Pic16f877Danko_123No ratings yet
- Tubo Mecanico CuadradoDocument1 pageTubo Mecanico CuadradoRodrigo Andres Heredia GarcésNo ratings yet
- Criterios para La Selección de Un Motor y Controles EléctricosDocument9 pagesCriterios para La Selección de Un Motor y Controles EléctricosRodrigo Andres Heredia GarcésNo ratings yet
- Procesamiento de Imágenes Con MATLABDocument14 pagesProcesamiento de Imágenes Con MATLABRodrigo Andres Heredia GarcésNo ratings yet
- Manual Bes Esp OilDocument180 pagesManual Bes Esp OilAdis FloresNo ratings yet
- Capítulo - 03 - Levas - ShigleyDocument12 pagesCapítulo - 03 - Levas - ShigleyJonathanRVNo ratings yet
- WEG Seleccion y Aplicacion de Motores Electricos Articulo Tecnico EspanolDocument3 pagesWEG Seleccion y Aplicacion de Motores Electricos Articulo Tecnico EspanolLuis GranadosNo ratings yet
- Comandos Básicos en GNUDocument3 pagesComandos Básicos en GNUMarvin QuitioNo ratings yet
- Pid Ziegler NicholsDocument6 pagesPid Ziegler NicholsAlex PerezNo ratings yet
- VIBRACIONESDocument76 pagesVIBRACIONESRodrigo Andres Heredia GarcésNo ratings yet
- Diseño TermometroDocument10 pagesDiseño TermometroRodrigo Andres Heredia GarcésNo ratings yet
- Informe Final TacometroDocument18 pagesInforme Final TacometroGabriela Nuñez0% (1)
- Sensores y ActuadoresDocument26 pagesSensores y ActuadoresRodrigo Andres Heredia GarcésNo ratings yet
- Capítulo - 03 - Levas - ShigleyDocument12 pagesCapítulo - 03 - Levas - ShigleyJonathanRVNo ratings yet
- G3 Rodrigo HerediaDocument4 pagesG3 Rodrigo HerediaRodrigo Andres Heredia GarcésNo ratings yet
- Instalación de SODocument7 pagesInstalación de SORicardo Gutierrez SalcedoNo ratings yet
- CIRCUITOS SECUENCIALES Flip - Flop J-KDocument5 pagesCIRCUITOS SECUENCIALES Flip - Flop J-KRodrigo Andres Heredia GarcésNo ratings yet
- HerediaRodrigo DACyADCDocument5 pagesHerediaRodrigo DACyADCRodrigo Andres Heredia GarcésNo ratings yet
- Instalacion UbuntuDocument8 pagesInstalacion UbuntuRodrigo Andres Heredia GarcésNo ratings yet
- Test de Evaluación Módulo 2 (20 Puntos) Revisión Del IntentoDocument4 pagesTest de Evaluación Módulo 2 (20 Puntos) Revisión Del IntentoIván David Muñoz Dominguez100% (1)
- Factores GeomorfológicosDocument39 pagesFactores GeomorfológicosRodrigo José0% (1)
- Tarea 2 - TQMDocument8 pagesTarea 2 - TQMvesquichaNo ratings yet
- Historia de La Geronto-Geriatría - MariammesarayDocument6 pagesHistoria de La Geronto-Geriatría - MariammesaraySaray Cruz100% (1)
- Presentación de ANOKA TRAVELDocument5 pagesPresentación de ANOKA TRAVELANOKA TRAVELNo ratings yet
- Redes Neuronales - ApuntesDocument9 pagesRedes Neuronales - ApuntesDaniel Nogales VjugfgNo ratings yet
- ModelosSistemicosDocument34 pagesModelosSistemicosTamar KstilloNo ratings yet
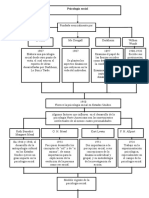
- Mapa Conceptual Psicologia SocialDocument1 pageMapa Conceptual Psicologia Socialisrael Martinez B.100% (5)
- Triptico de La Contaminacion Del AguaDocument2 pagesTriptico de La Contaminacion Del AguaLeopold Felipe Juninho Navarro CaberoNo ratings yet
- Tarea Estadistica 1Document2 pagesTarea Estadistica 1ClauvelaNo ratings yet
- PRONAREADocument15 pagesPRONAREAGisela SchiavaNo ratings yet
- LSI y VLSIDocument3 pagesLSI y VLSIomareke78% (9)
- Experimento TuskegeeDocument2 pagesExperimento TuskegeeNancy CcoyaNo ratings yet
- Presentación Lo ImposibleDocument2 pagesPresentación Lo ImposibleCristóbalNo ratings yet
- Etapas Duelo PDFDocument2 pagesEtapas Duelo PDFCrystalNo ratings yet
- Anexo 3 - Plantilla Tarea 1Document9 pagesAnexo 3 - Plantilla Tarea 1Yudy LondoñoNo ratings yet
- Escenarios de Futuro-T4 ProspectivaDocument34 pagesEscenarios de Futuro-T4 ProspectivamarNo ratings yet
- Sesion 3 Xo - Comprobantes de PagoDocument1 pageSesion 3 Xo - Comprobantes de PagoSteven RT100% (1)
- Plan Anual Del SgasDocument36 pagesPlan Anual Del SgasJohn FloresNo ratings yet
- Proceso captación selección personal empresaDocument4 pagesProceso captación selección personal empresaYaryNo ratings yet
- Desarrollo Curricular - (1875529) - CUESTIONARIODocument13 pagesDesarrollo Curricular - (1875529) - CUESTIONARIODiego Andrés Buitrago100% (1)
- DELITOS INFORMATICOS en VenezuelaDocument4 pagesDELITOS INFORMATICOS en VenezuelaMaria Garcia DiazNo ratings yet
- Articulo El Analisis Funcional de Operabilidad HazopDocument4 pagesArticulo El Analisis Funcional de Operabilidad HazopJaime HernandezNo ratings yet
- Supervisión Administrativa de La ObraDocument38 pagesSupervisión Administrativa de La ObraBrayan ArosteguiNo ratings yet
- Proyecto Del LiceoDocument13 pagesProyecto Del LiceodoritaxxNo ratings yet
- Norma de Calidad de AguaDocument34 pagesNorma de Calidad de AguaPaul Alonso Durand PachecoNo ratings yet
- La Marca (Norberto Chaves)Document2 pagesLa Marca (Norberto Chaves)Adris PiNo ratings yet
- Examen Final Gestion CurtDocument15 pagesExamen Final Gestion CurtSisy AscateNo ratings yet
- Comunicación No Verbal y Primera ImpresiónDocument1 pageComunicación No Verbal y Primera ImpresiónCatherine RamírezNo ratings yet
- Acta Constitutiva OngDocument6 pagesActa Constitutiva Ongcin1102No ratings yet