You might also like
- Instrucciones Tcas para Redes de Abt (Rev 2) 20080219 p2Document1 pageInstrucciones Tcas para Redes de Abt (Rev 2) 20080219 p2Roberto MartínezNo ratings yet
- Esquema de Armaduras de CamarasDocument1 pageEsquema de Armaduras de CamarasRoberto MartínezNo ratings yet
- Instrucciones Tcas para Redes de Abt (Rev 2) 20080219 p4Document1 pageInstrucciones Tcas para Redes de Abt (Rev 2) 20080219 p4Roberto MartínezNo ratings yet
- Instrucciones Tcas para Redes de Abt (Rev 2) 20080219 p3Document1 pageInstrucciones Tcas para Redes de Abt (Rev 2) 20080219 p3Roberto MartínezNo ratings yet
- Secciones Tipo de Zanja para Tub de HACHDocument1 pageSecciones Tipo de Zanja para Tub de HACHRoberto MartínezNo ratings yet
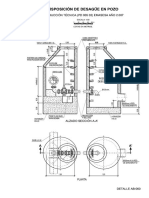
- Disposicion de Desagüe en Pozo PDFDocument1 pageDisposicion de Desagüe en Pozo PDFRoberto MartínezNo ratings yet
- Acometida de Vertido Con Entronque A Pozo PDFDocument1 pageAcometida de Vertido Con Entronque A Pozo PDFRoberto MartínezNo ratings yet
- Instrucciones Tcas para Redes de Abt (Rev 2) 20080219 p1Document1 pageInstrucciones Tcas para Redes de Abt (Rev 2) 20080219 p1Roberto MartínezNo ratings yet
- Arqueta para Toma de Muestras PDFDocument1 pageArqueta para Toma de Muestras PDFRoberto MartínezNo ratings yet
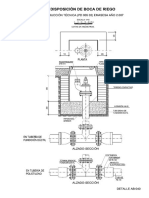
- Disposicion de Boca de Riego PDFDocument1 pageDisposicion de Boca de Riego PDFRoberto MartínezNo ratings yet
- Disposicion de Llave de Registro para Acometida PDFDocument1 pageDisposicion de Llave de Registro para Acometida PDFRoberto MartínezNo ratings yet
- Secciones Tipo de Zanja para Tub de Fundicion y PolietilenoDocument1 pageSecciones Tipo de Zanja para Tub de Fundicion y PolietilenoRoberto MartínezNo ratings yet
- Disposicion de Valvula de Compuerta en PozoDocument1 pageDisposicion de Valvula de Compuerta en PozoRoberto MartínezNo ratings yet
- Disposicion de Hidrante en PozoDocument1 pageDisposicion de Hidrante en PozoRoberto MartínezNo ratings yet
- Carretes de Desmontaje PDFDocument1 pageCarretes de Desmontaje PDFRoberto MartínezNo ratings yet
- Caja para Boca de Riego PDFDocument1 pageCaja para Boca de Riego PDFRoberto MartínezNo ratings yet
- Acometida de Vertido Con Entronque A PozoDocument1 pageAcometida de Vertido Con Entronque A PozoRoberto MartínezNo ratings yet
- Disposicion de Ventosa en PozoDocument1 pageDisposicion de Ventosa en PozoRoberto MartínezNo ratings yet
- Acometida de Vertido en PVC-U Con Entronque DirectoDocument1 pageAcometida de Vertido en PVC-U Con Entronque DirectoRoberto MartínezNo ratings yet
- Acometida de Vertido en Gres Con Entronque DirectoDocument1 pageAcometida de Vertido en Gres Con Entronque DirectoRoberto MartínezNo ratings yet
- Instrucciones Tcas para Redes de Abt (Rev 2) 20080219Document117 pagesInstrucciones Tcas para Redes de Abt (Rev 2) 20080219Roberto MartínezNo ratings yet
- Losas de Cubierta de CamarasDocument1 pageLosas de Cubierta de CamarasRoberto MartínezNo ratings yet
- Esquema de Armaduras de CamarasDocument1 pageEsquema de Armaduras de CamarasRoberto MartínezNo ratings yet
- Arqueta para Toma de MuestrasDocument1 pageArqueta para Toma de MuestrasRoberto MartínezNo ratings yet
- Imbornal Mixto-Tipo IIDocument1 pageImbornal Mixto-Tipo IIRoberto MartínezNo ratings yet
- Acometida de Vertido en PVC-U Con Entronque DirectoDocument1 pageAcometida de Vertido en PVC-U Con Entronque DirectoRoberto MartínezNo ratings yet
- Disposicion de Boca de RiegoDocument1 pageDisposicion de Boca de RiegoRoberto MartínezNo ratings yet
- Tapa y Cerco para Pozo-C.p 700Document1 pageTapa y Cerco para Pozo-C.p 700Roberto MartínezNo ratings yet
- Pozo de Registro Tipo IDocument1 pagePozo de Registro Tipo IRoberto MartínezNo ratings yet
- Instrucciones Tecnicas para Redes de SNT 5Document1 pageInstrucciones Tecnicas para Redes de SNT 5Roberto MartínezNo ratings yet
- Manual Cal 5055 ElectricDocument2 pagesManual Cal 5055 ElectriceservinNo ratings yet
- Oferta Academica Senescyt 2018 para WebDocument108 pagesOferta Academica Senescyt 2018 para WebMadison MadisonNo ratings yet
- Tao de La Energia PromoDocument1 pageTao de La Energia PromoJair DoremifasoLuna AlkimistaNo ratings yet
- Psicoprofilaxis obstétricaDocument15 pagesPsicoprofilaxis obstétricaVilmaNo ratings yet
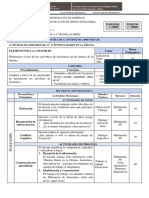
- Ficha - de - Actividad - 11.1. AdministracionDocument2 pagesFicha - de - Actividad - 11.1. AdministracionJuan Antonio Cabanillas perezNo ratings yet
- Especialidades PericialesDocument14 pagesEspecialidades Pericialesseñorcharlie0% (1)
- Trabajo Social ResumenDocument6 pagesTrabajo Social Resumencarol landazabalNo ratings yet
- Etica en Las Agencias de Viajes y TurismoDocument10 pagesEtica en Las Agencias de Viajes y TurismoAndy GallegosNo ratings yet
- Ejemplos de AlgoritmosDocument12 pagesEjemplos de Algoritmosapi-381388296% (26)
- Manual de Orientación TERCERO MEDIO. Manual de Orientación. Tercero MedioDocument87 pagesManual de Orientación TERCERO MEDIO. Manual de Orientación. Tercero MedioJosé M. AndradeNo ratings yet
- Factores de Riesgo y Proteccion Del Suicidio en Adultos MayoresDocument8 pagesFactores de Riesgo y Proteccion Del Suicidio en Adultos MayoresᴛʜᴇᴄʀᴇᴇwNo ratings yet
- Anexo 3d. Manual de La Encuesta CIDIDocument56 pagesAnexo 3d. Manual de La Encuesta CIDIDAVID SANTIAGO OSSA POSADANo ratings yet
- Derecho Penal Documento ElectrónicoDocument33 pagesDerecho Penal Documento ElectrónicoHenruchito Ramos Trujillo100% (2)
- Manual de Convivencia Semana de Inducion (1) 2023Document15 pagesManual de Convivencia Semana de Inducion (1) 2023Ruby Margarita Alcala EspinosaNo ratings yet
- FMB630 Protocols V0.2Document30 pagesFMB630 Protocols V0.2Yosef GUEVARA SALAMANCANo ratings yet
- Significacion Test TecaDocument3 pagesSignificacion Test TecaAlejandra Flor0% (1)
- Sentencia Con Nmero de Expediente 8751709 de Tribunal Agrari - EsDocument67 pagesSentencia Con Nmero de Expediente 8751709 de Tribunal Agrari - EsBrian De La Cruz AguilarNo ratings yet
- La Prueba de OficioDocument3 pagesLa Prueba de OficioYomaira Sinahí Ñaño SalinasNo ratings yet
- Ciencias 4°Document4 pagesCiencias 4°Keñytha HenríquezNo ratings yet
- Inca Kola: La bebida peruana creada en 1935 como agradecimiento al paísDocument2 pagesInca Kola: La bebida peruana creada en 1935 como agradecimiento al paísValery PuriNo ratings yet
- Guía espiritual básicaDocument72 pagesGuía espiritual básicaDavid Perez100% (5)
- Adaptación Programa Marori Y Tutibu. 1° BasicoDocument49 pagesAdaptación Programa Marori Y Tutibu. 1° BasicoRichard JofréNo ratings yet
- CAUSAS de RoboDocument2 pagesCAUSAS de RoboIbrahim Alcala59% (27)
- Folleto Tríptico Sida VihDocument2 pagesFolleto Tríptico Sida VihLourdes M.No ratings yet
- Oración A Los Tres ArcángelesDocument5 pagesOración A Los Tres ArcángelesOscar PradaNo ratings yet
- Estatuto Del Colegio de LicenciadosDocument13 pagesEstatuto Del Colegio de Licenciadoscindimartin100% (2)
- Cuadro Comparativo Tecnicas de GrupoDocument3 pagesCuadro Comparativo Tecnicas de Grupoabigail carcamoNo ratings yet
- Sistema de Frenos AbsDocument6 pagesSistema de Frenos AbsPableins FranciscoNo ratings yet
- Sugerencias de Actividades de La PazDocument24 pagesSugerencias de Actividades de La PazSELVIN GARCIANo ratings yet
- Bloques CombinacionalesDocument5 pagesBloques CombinacionalesfedogonzalezNo ratings yet