You might also like
- Motor Induksi 3 PhasaDocument165 pagesMotor Induksi 3 PhasaIndra SaputraNo ratings yet
- Mesin InduksiDocument23 pagesMesin InduksiAna Anawati100% (1)
- Generator AsinkronDocument11 pagesGenerator AsinkronIbrahim Syaharuddin0% (1)
- Contoh Soal Motor Induksi Satu Phasa.Document17 pagesContoh Soal Motor Induksi Satu Phasa.sandy widodoNo ratings yet
- Motor DahlanderDocument13 pagesMotor Dahlandermay_imasNo ratings yet
- Penggulungan Motor Induksi 1 FasaDocument27 pagesPenggulungan Motor Induksi 1 FasaAzka ErisaNo ratings yet
- Motor DC ShuntDocument28 pagesMotor DC ShuntJuniar Anika PNo ratings yet
- Pengertian Motor InduksiDocument9 pagesPengertian Motor InduksiCalvinNo ratings yet
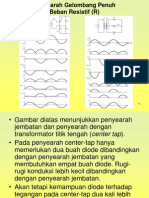
- Bab 4.2 Penyearah Gelombang PenuhDocument66 pagesBab 4.2 Penyearah Gelombang PenuhluthfanbNo ratings yet
- Pengemudian Dan Penggunaan Motor LIstrikDocument20 pagesPengemudian Dan Penggunaan Motor LIstrikAilsa NabilahNo ratings yet
- Karakteristik Generator Sinkron Beban NolDocument5 pagesKarakteristik Generator Sinkron Beban NolyasserNo ratings yet
- Arus EksitasiDocument11 pagesArus EksitasiAfrida Fazira MNo ratings yet
- Diktat Mesin-Mesin ListrikDocument30 pagesDiktat Mesin-Mesin Listriksuka kepoNo ratings yet
- Buku Ajar Mesin Listrik IDocument73 pagesBuku Ajar Mesin Listrik IGalihPratamaNo ratings yet
- Karakteristik DC ShuntDocument19 pagesKarakteristik DC ShuntLinda_murniNo ratings yet
- 4 Motor Induksi 3 Phase BaruDocument16 pages4 Motor Induksi 3 Phase BaruFakhri AfifNo ratings yet
- Keterangan Name Plate Pada Motor ListrikDocument3 pagesKeterangan Name Plate Pada Motor ListrikHaikal Adnan100% (1)
- TTL 2Document97 pagesTTL 2fadjar_senseiNo ratings yet
- Faktor Daya Trafo Dan Motor ListrikDocument64 pagesFaktor Daya Trafo Dan Motor ListrikReski Alya PradiftaNo ratings yet
- Genap - 20 - 21 - Uas - Distribusi PKK - Selasa (Modd)Document7 pagesGenap - 20 - 21 - Uas - Distribusi PKK - Selasa (Modd)WALA TVNo ratings yet
- Makalah Motor Induksi 3 Fasa 1Document27 pagesMakalah Motor Induksi 3 Fasa 1Lucaz PiazonNo ratings yet
- Makalah ELCBDocument11 pagesMakalah ELCBClariossa Daora Forthorthe0% (1)
- Pendingin GeneratorDocument5 pagesPendingin GeneratorJennifer Taylor100% (2)
- Generator SinkronDocument27 pagesGenerator SinkronGilang SeptianNo ratings yet
- TransformatorDocument21 pagesTransformatorRico Afrinando100% (1)
- Motor Induksi 3 FasaDocument24 pagesMotor Induksi 3 FasaBery Solehudin HamidNo ratings yet
- Sistem Pentanahan Pada Sistem DistribusiDocument26 pagesSistem Pentanahan Pada Sistem DistribusiSonia SoniaNo ratings yet
- Sistem Proteksi Pada Motor & Motor SinkronDocument25 pagesSistem Proteksi Pada Motor & Motor SinkronImam KhairNo ratings yet
- Prinsip Kerja Motor Induksi 3 FasaDocument14 pagesPrinsip Kerja Motor Induksi 3 FasaKim NamjoonNo ratings yet
- Starting Motor Induksi TAHANAN STATORDocument12 pagesStarting Motor Induksi TAHANAN STATORPriasma ChandNo ratings yet
- Gaya Gerak Untuk Aplikasi Motor ListrikDocument20 pagesGaya Gerak Untuk Aplikasi Motor ListrikThoriq AbdurrahmanNo ratings yet
- Relay Differensial Pada TrafoDocument12 pagesRelay Differensial Pada TrafoSanusiNo ratings yet
- Rotor GulungDocument6 pagesRotor GulungZaky F AkhmadNo ratings yet
- Motor Induksi Rotor Lilit 3 FasaDocument1 pageMotor Induksi Rotor Lilit 3 FasaAnggraeny Glory0% (2)
- Laporan Modul 1Document10 pagesLaporan Modul 1Syaipul Ulum100% (1)
- Pengontrol Tegangan Ac-El-6fDocument18 pagesPengontrol Tegangan Ac-El-6fRachmat P SiagianNo ratings yet
- Resonan Converter 1Document7 pagesResonan Converter 1Rindu Putra AmbaritaNo ratings yet
- Generator SinkronDocument35 pagesGenerator SinkronMuhammad Iqbal Fathurahman83% (6)
- Makalah Jenis - Jenis Motor ListrikDocument13 pagesMakalah Jenis - Jenis Motor Listrikanisaibo100% (2)
- Relay Proteksi Generator - 2Document10 pagesRelay Proteksi Generator - 2Ladisca OktasariNo ratings yet
- Pengasutan MotorDocument14 pagesPengasutan MotorMartinNo ratings yet
- Medan PutarDocument2 pagesMedan PutarValentino Tarigan75% (4)
- Pemakaian Daya Dan Torsi Motor DC BrushlessDocument15 pagesPemakaian Daya Dan Torsi Motor DC BrushlessR. Dimas BagusNo ratings yet
- Pengukuran Hambatan Kumparan Motor Dan GeneratorPengukuran Hambatan Kumparan Motor Dan GeneratorDocument9 pagesPengukuran Hambatan Kumparan Motor Dan GeneratorPengukuran Hambatan Kumparan Motor Dan GeneratorMuiz Ashar DinataNo ratings yet
- Laporan Percobaan Hubung Singkat Kel 4Document17 pagesLaporan Percobaan Hubung Singkat Kel 4andoNo ratings yet
- Laporan Motor Induksi 3 Fasa Rotor BelitanDocument11 pagesLaporan Motor Induksi 3 Fasa Rotor BelitanFryma ZhafranNo ratings yet
- Hubung SingkatDocument21 pagesHubung Singkatirsyad123111No ratings yet
- Elektronika Daya Kendali Tegangan ACDocument11 pagesElektronika Daya Kendali Tegangan ACReva BiazNo ratings yet
- Torsi Dan Daya Motor 3 FasaDocument3 pagesTorsi Dan Daya Motor 3 FasaSidiq PermonoNo ratings yet
- Pengujian Motor InduksiDocument9 pagesPengujian Motor InduksiKalih A ShofaNo ratings yet
- Standarisasi Dan Klasifikasi Motor InduksiDocument5 pagesStandarisasi Dan Klasifikasi Motor InduksiNur Hidayat AriefNo ratings yet
- Proteksi Motor Induksi 3 FasaDocument21 pagesProteksi Motor Induksi 3 FasaMuhammad FirlyNo ratings yet
- 14 Proteksi MotorDocument48 pages14 Proteksi MotorFikri Imam RahmanNo ratings yet
- Penyearah Tiga Fasa Setengah GelombangDocument18 pagesPenyearah Tiga Fasa Setengah GelombangtyoNo ratings yet
- Responsi MLDI Lab Instalasi - Kode Soal A - 181031061 - Wisnu Agung PamungkasDocument3 pagesResponsi MLDI Lab Instalasi - Kode Soal A - 181031061 - Wisnu Agung PamungkasSiddiq Martir0% (1)
- Pembahasan Praktikum Efisiensi Energi Motor ListrikDocument2 pagesPembahasan Praktikum Efisiensi Energi Motor Listrikawrikah alphardliebeNo ratings yet
- Chapter. 4 Prinsip Konservasi EnergiDocument22 pagesChapter. 4 Prinsip Konservasi Energidedi sanatraNo ratings yet
- MOTOR LISTRIK RizqiDocument22 pagesMOTOR LISTRIK RizqiDepi Rustam EpendiNo ratings yet
- KOORDINASIDocument36 pagesKOORDINASIKrishna JashaNo ratings yet