You might also like
- WSS-PSS-SS Cat04 133207 GBDocument64 pagesWSS-PSS-SS Cat04 133207 GBkillua142No ratings yet
- OpenCV 2.4.8 Introduction (English) v2Document23 pagesOpenCV 2.4.8 Introduction (English) v2killua142No ratings yet
- Parameter IzationDocument35 pagesParameter Izationkillua142No ratings yet
- CV Ch0 Syllabus 2014Document22 pagesCV Ch0 Syllabus 2014killua142No ratings yet
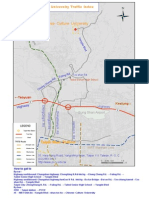
- Chinese Culture University Chinese Culture UniversityDocument1 pageChinese Culture University Chinese Culture Universitykillua142No ratings yet
- Presentation 1Document3 pagesPresentation 1killua142No ratings yet
- Fuzzy SVMDocument5 pagesFuzzy SVMSudheer DsNo ratings yet
- Dac 0808Document10 pagesDac 0808Gonzalo BerardoNo ratings yet
- Matlab Simulink DC MotorDocument12 pagesMatlab Simulink DC Motorkillua142100% (4)
- RC Snubber Design for Thyristor Power ControlDocument25 pagesRC Snubber Design for Thyristor Power ControlCarlos Pavon100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Course Title: Applied Electricity I Course Code: Ele 201 Course Unit: 02 Course LecturerDocument8 pagesCourse Title: Applied Electricity I Course Code: Ele 201 Course Unit: 02 Course LecturerAdamu SuleimanNo ratings yet
- Introduction To Kelly Radionic AntennasDocument11 pagesIntroduction To Kelly Radionic AntennasGavrila Lucian100% (1)
- 580 ProdMan A010055Document204 pages580 ProdMan A010055Abraham Cisneros GarcíaNo ratings yet
- Coulomb barrier in LENR processesDocument12 pagesCoulomb barrier in LENR processesEvANo ratings yet
- Domino User ManualDocument288 pagesDomino User Manualsuhail100% (2)
- Electrostatic Neutralization: A Key To Accurate & Repeatable PM Filter WeighingDocument17 pagesElectrostatic Neutralization: A Key To Accurate & Repeatable PM Filter WeighingAbdul HadiNo ratings yet
- Electric Potential MappingDocument91 pagesElectric Potential MappingElias ChavezNo ratings yet
- Swiss Testakica Free Energy DeviceDocument9 pagesSwiss Testakica Free Energy DeviceДејан Павловић100% (2)
- 5.2 The Biot-Savart Law 5.2.1 Steady Currents 5.2.2 The Magnetic Field of A Steady CurrentDocument5 pages5.2 The Biot-Savart Law 5.2.1 Steady Currents 5.2.2 The Magnetic Field of A Steady CurrentAwais YousafNo ratings yet
- Basic Electrometer: Instruction Sheet For The PASCO Model ES-9078Document6 pagesBasic Electrometer: Instruction Sheet For The PASCO Model ES-9078carlos alexandre nunes braiaNo ratings yet
- Manual EGCP-2Document234 pagesManual EGCP-2Jaime Igor Viegas100% (4)
- Chapter 12 (PHYSICS PART 2 FSC)Document19 pagesChapter 12 (PHYSICS PART 2 FSC)NotesMARTFSC88% (8)
- Ax SeriesDocument48 pagesAx Seriesradn23No ratings yet
- Babbited Bearing Inspection John WhalenDocument52 pagesBabbited Bearing Inspection John WhalenwidiantoekoNo ratings yet
- II PUC PHYSICS - Previously Appeared Questions, Important Questions and Answers For 2023 Exam by MANJUNATH B.Document53 pagesII PUC PHYSICS - Previously Appeared Questions, Important Questions and Answers For 2023 Exam by MANJUNATH B.praveens.photos.2023No ratings yet
- Tanker Questions With Answers (Phase-1) IndiaDocument28 pagesTanker Questions With Answers (Phase-1) IndiaRohit KarwasraNo ratings yet
- Lecture Planner - Physics - PDF Only - (12th Board Booster 2024)Document3 pagesLecture Planner - Physics - PDF Only - (12th Board Booster 2024)Shivam SandilyaNo ratings yet
- Physics Vol 2 Master The NCERTDocument482 pagesPhysics Vol 2 Master The NCERTARYAN RANADIVE100% (1)
- Service Manual: HCD-GRX9000/RX900Document84 pagesService Manual: HCD-GRX9000/RX900Led MachineNo ratings yet
- Polycopié857Document126 pagesPolycopié857dedo DZNo ratings yet
- 32LF2500 32LF2510Document156 pages32LF2500 32LF2510Francisco Jose Gonzalez MeroñoNo ratings yet
- Unit1l1s - Basic Electrics - 30-04-01Document21 pagesUnit1l1s - Basic Electrics - 30-04-01amr abdellahNo ratings yet
- Terminations and Joints For XLPE-Insulated Medium Voltage Cables PDFDocument12 pagesTerminations and Joints For XLPE-Insulated Medium Voltage Cables PDFmagdy5220% (1)
- GRFP01 Gr11 Ch09 ALLDocument37 pagesGRFP01 Gr11 Ch09 ALLAidanNo ratings yet
- Ele 117 ElectrostaticsDocument20 pagesEle 117 ElectrostaticsOvie MacatiagNo ratings yet
- Electric FieldsDocument21 pagesElectric FieldsMark Lorenz BertulfoNo ratings yet
- Precipitador Electrostático ADocument6 pagesPrecipitador Electrostático AFrancy Kasandra Mamani LlaiqueNo ratings yet
- Module 1 Basic Electrical Ideas Units Part I 1Document32 pagesModule 1 Basic Electrical Ideas Units Part I 1dragh meh downNo ratings yet
- The Law of Electrostatic Force Purpose:: Electricity Coulomb's LawDocument2 pagesThe Law of Electrostatic Force Purpose:: Electricity Coulomb's LawJoseph zNo ratings yet
- Addition and Subtraction of ChargesDocument13 pagesAddition and Subtraction of ChargesSahil SethiNo ratings yet