You might also like
- Jerarquización Del ProgramaDocument5 pagesJerarquización Del ProgramaBruno DiazNo ratings yet
- Instalaciones ElectricasDocument5 pagesInstalaciones ElectricasJohanna PerezNo ratings yet
- TIC en PPDocument2 pagesTIC en PPBruno DiazNo ratings yet
- Estatutos Motoclub Aguilas AztecasDocument9 pagesEstatutos Motoclub Aguilas AztecasBruno Diaz50% (2)
- Mecanismo 4 BarrasDocument15 pagesMecanismo 4 BarrasBruno DiazNo ratings yet
- Pasos para Ser Un LiderDocument6 pagesPasos para Ser Un LiderBruno DiazNo ratings yet
- Invertir El Giro de Motor MonofasicoDocument2 pagesInvertir El Giro de Motor Monofasicoshalio007100% (2)
- Estatutos Motoclub Aguilas AztecasDocument9 pagesEstatutos Motoclub Aguilas AztecasBruno Diaz50% (2)
- CIM para ProducciónDocument21 pagesCIM para ProducciónBruno DiazNo ratings yet
- Leyes de KirchhoffDocument2 pagesLeyes de KirchhoffBruno DiazNo ratings yet
- Motores NEMADocument7 pagesMotores NEMABruno DiazNo ratings yet
- Transformada Laplace control procesosDocument44 pagesTransformada Laplace control procesosgtbimmerNo ratings yet
- Cotas Tolerancias y AjustesDocument12 pagesCotas Tolerancias y AjustesBruno DiazNo ratings yet
- Ortografia BasicaDocument84 pagesOrtografia BasicaOsiris Venus T100% (3)
- Tipo S Deros CasDocument20 pagesTipo S Deros CasBruno Diaz100% (1)
- 2 Montaje RodamientosDocument27 pages2 Montaje RodamientosLuis PallerosNo ratings yet
- Tema 4 Flip-Flops 2009Document70 pagesTema 4 Flip-Flops 2009cibd12No ratings yet
- 7 PDFDocument26 pages7 PDFDavid Barreto MendozaNo ratings yet
- Tipos de RoscasDocument20 pagesTipos de RoscasBruno DiazNo ratings yet
- Mecanica IndustrialDocument28 pagesMecanica IndustrialDaniel Carter0% (1)
- Intro Control DigitalDocument16 pagesIntro Control DigitalBruno DiazNo ratings yet
- English Level 1 PDFDocument56 pagesEnglish Level 1 PDFBruno DiazNo ratings yet
- Transformada Laplace control procesosDocument44 pagesTransformada Laplace control procesosgtbimmerNo ratings yet
- Cotas Tolerancias y AjustesDocument12 pagesCotas Tolerancias y AjustesBruno DiazNo ratings yet
- Transformada Laplace control procesosDocument44 pagesTransformada Laplace control procesosgtbimmerNo ratings yet
- Tipos de RoscasDocument20 pagesTipos de RoscasBruno DiazNo ratings yet
- Planificación y gestión de proyectos con MS ProjectDocument61 pagesPlanificación y gestión de proyectos con MS ProjectSebastián LlauceNo ratings yet
- Ensayos Mecanicos Estaticos, Dureza, Tension, CompresionDocument41 pagesEnsayos Mecanicos Estaticos, Dureza, Tension, CompresionDonald Askeland Phule40% (5)
- Tipos de RoscasDocument20 pagesTipos de RoscasBruno DiazNo ratings yet
- TiposCuecasChileDocument22 pagesTiposCuecasChileaugusto navarro morenoNo ratings yet
- Lista de EquivalentesDocument7 pagesLista de EquivalentesIrisLinares97No ratings yet
- Curso InmovilizadorDocument35 pagesCurso InmovilizadorMauricio Serrano100% (1)
- Cuentos, Canciones y Obras de TeatroDocument31 pagesCuentos, Canciones y Obras de TeatroAlejandra Cacciurri100% (1)
- Las Tiendas de Autoservicio y Departamentales en La ActualidadDocument2 pagesLas Tiendas de Autoservicio y Departamentales en La ActualidadCarlos RamirezNo ratings yet
- Campeonato Básquet U17 Cajamarca 2022Document8 pagesCampeonato Básquet U17 Cajamarca 2022LUIS MANUEL SILVA ZAFRANo ratings yet
- 7.1 Caracteristicas - De.los - Firmes JVDocument25 pages7.1 Caracteristicas - De.los - Firmes JVJose GarciaNo ratings yet
- Inglés Frases TiendaDocument4 pagesInglés Frases TiendaJosé Luís Barragán PuppoNo ratings yet
- Bendice Alma MíaDocument18 pagesBendice Alma MíaAlexisNo ratings yet
- Actividades de Sucesiones para Quinto de PrimariaDocument9 pagesActividades de Sucesiones para Quinto de PrimariaJuan carlos Elizarraraz arteagaNo ratings yet
- Patrón Amigurumi - WinnieDocument11 pagesPatrón Amigurumi - WinnieAnahi TorresNo ratings yet
- Leyenda y MitoDocument2 pagesLeyenda y MitoHarold PabónNo ratings yet
- Juego de Palabras Retahílas, Refranes, TrabalenguasDocument1 pageJuego de Palabras Retahílas, Refranes, TrabalenguasPathy FalconíNo ratings yet
- Uso de Subjuntivo 4 - HoofdzinDocument2 pagesUso de Subjuntivo 4 - HoofdzinInge Dirk Verbeeck MaesNo ratings yet
- Guia de Iniciacion A La Pintura Digital Con ProcreateDocument16 pagesGuia de Iniciacion A La Pintura Digital Con Procreategracita33% (3)
- Guia Esp8266 Modulo WifiDocument12 pagesGuia Esp8266 Modulo WifiAir LNo ratings yet
- ClasificacionDeLosInstumentos ENMANUEL PALOMINODocument4 pagesClasificacionDeLosInstumentos ENMANUEL PALOMINOSnakerubik77 FvoNo ratings yet
- Termico 5Document19 pagesTermico 5RatoncitoElReyNo ratings yet
- 26542-87488-1-PB Manuel M Ponce en SudamericaDocument11 pages26542-87488-1-PB Manuel M Ponce en SudamericaFrancesco CharquenhoNo ratings yet
- Diccionario Básico ItalianoDocument6 pagesDiccionario Básico ItalianoVicente Pérez Navarro86% (7)
- Artrosis en Columna VertebralDocument19 pagesArtrosis en Columna VertebralAndrea Romero ReyesNo ratings yet
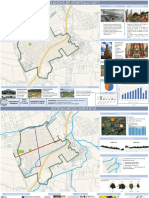
- Analisis Sistemico de CatambucoDocument6 pagesAnalisis Sistemico de CatambucoManuel Andres Cueltan Cuaran [Estudiante]No ratings yet
- C.V. 2013Document7 pagesC.V. 2013Billy Rosales FernandezNo ratings yet
- Diccionario de Marketing Digital PDFDocument57 pagesDiccionario de Marketing Digital PDFShadey RoweNo ratings yet
- Dinamica Gestion EmpresarialDocument57 pagesDinamica Gestion EmpresarialNatalia FernandezNo ratings yet
- 01-01 Informacion Sobre Los Fusibles y RelevadoresDocument6 pages01-01 Informacion Sobre Los Fusibles y RelevadoresabrahamrojasNo ratings yet
- Mistura, feria gastronómica peruanaDocument1 pageMistura, feria gastronómica peruanaAdrian Valdivia CalleNo ratings yet
- DELEGACIONESDocument32 pagesDELEGACIONESRaul Andrés Herrera SuazaNo ratings yet
- Tarifas Diners Personal 2015Document4 pagesTarifas Diners Personal 2015Stefy JimenezNo ratings yet
- EMEA ThermoPro TP8 PDFDocument2 pagesEMEA ThermoPro TP8 PDFAlex RogelioNo ratings yet