You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- PT6C-67C MM Chap 4-5Document39 pagesPT6C-67C MM Chap 4-5anony810388% (8)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 6.4.1 Don Funk CorrectedDocument1 page6.4.1 Don Funk CorrectedAkinoJohnkennedyNo ratings yet
- EXPERIMENT 3a and 3b - Aluminum Content Via Redox and ColorimeterDocument13 pagesEXPERIMENT 3a and 3b - Aluminum Content Via Redox and ColorimeterTrupti soniNo ratings yet
- Issues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)Document3 pagesIssues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)AkinoJohnkennedyNo ratings yet
- ExperimentDocument197 pagesExperimentAkinoJohnkennedyNo ratings yet
- Issues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)Document3 pagesIssues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)AkinoJohnkennedyNo ratings yet
- Issues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)Document3 pagesIssues and Accomplishments: Red (Alarms To Management, Help Needed From Management Team)AkinoJohnkennedyNo ratings yet
- Tubefin2 1Document99 pagesTubefin2 1Mili MrbNo ratings yet
- FinalPaper 315 LatestDocument8 pagesFinalPaper 315 LatestSachin ShendeNo ratings yet
- Confirmation - Delta Air LinesDocument5 pagesConfirmation - Delta Air LinesAkinoJohnkennedyNo ratings yet
- Confirmation - Delta Air LinesDocument5 pagesConfirmation - Delta Air LinesAkinoJohnkennedyNo ratings yet
- ESCI 311-37 (Thurs-Ravindra) - Statistics Lab DataDocument3 pagesESCI 311-37 (Thurs-Ravindra) - Statistics Lab DataAkinoJohnkennedyNo ratings yet
- Charter Payment Confirmation Number 007591Document2 pagesCharter Payment Confirmation Number 007591AkinoJohnkennedyNo ratings yet
- Wire Transfer Info As of 7-10-15Document1 pageWire Transfer Info As of 7-10-15AkinoJohnkennedyNo ratings yet
- Spring BarDocument3 pagesSpring BarAkinoJohnkennedy100% (1)
- UCK441EDocument2 pagesUCK441EAkinoJohnkennedyNo ratings yet
- Strain Gauge Calibration and Ringing FrequencyDocument4 pagesStrain Gauge Calibration and Ringing FrequencyAkinoJohnkennedyNo ratings yet
- Robust AdaptiveDocument3 pagesRobust AdaptiveKeerthiPratheek ReddyNo ratings yet
- Fall 2014 Meng 593 SyllabusDocument2 pagesFall 2014 Meng 593 SyllabusAkinoJohnkennedyNo ratings yet
- HW3 S15 SolnDocument5 pagesHW3 S15 SolnAkinoJohnkennedyNo ratings yet
- Guidelines For Requesting GS Graduate Assistantship.09-10Document5 pagesGuidelines For Requesting GS Graduate Assistantship.09-10AkinoJohnkennedyNo ratings yet
- PreLab TemplateDocument1 pagePreLab TemplateAkinoJohnkennedyNo ratings yet
- Formal Lab Grading SheetDocument1 pageFormal Lab Grading SheetAkinoJohnkennedyNo ratings yet
- Aeroelastic FlutterDocument15 pagesAeroelastic FlutterAkinoJohnkennedyNo ratings yet
- Multiple Degrees of FreedomDocument44 pagesMultiple Degrees of FreedomShafiq Ahmed Shahbaz100% (1)
- Temperature Vs Displacement: Akino JohnkennedyDocument10 pagesTemperature Vs Displacement: Akino JohnkennedyAkinoJohnkennedyNo ratings yet
- Fall 2012 OPT Workshop HandoutDocument6 pagesFall 2012 OPT Workshop HandoutAkinoJohnkennedyNo ratings yet
- Finite Element AnalysisDocument18 pagesFinite Element AnalysisRuben Bartolome GarciaNo ratings yet
- F1 Post Completion Optional Practical TrainingDocument5 pagesF1 Post Completion Optional Practical TrainingAkinoJohnkennedyNo ratings yet
- F1 Post Completion Optional Practical TrainingDocument5 pagesF1 Post Completion Optional Practical TrainingAkinoJohnkennedyNo ratings yet
- AENG556 HW01 SolutionsDocument5 pagesAENG556 HW01 SolutionsAkinoJohnkennedyNo ratings yet
- Fall 2012 OPT Workshop HandoutDocument6 pagesFall 2012 OPT Workshop HandoutAkinoJohnkennedyNo ratings yet
- Permeability: The Key to ProductionDocument30 pagesPermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- Asme B36.10M-2018Document36 pagesAsme B36.10M-2018امينNo ratings yet
- Lab5 AnswerSheetDocument3 pagesLab5 AnswerSheetnislam57No ratings yet
- Ashrae - 2009 I-P - F09 - AddDocument2 pagesAshrae - 2009 I-P - F09 - AddSergio SemmNo ratings yet
- Master Opp GaveDocument84 pagesMaster Opp GaveRizki Al AyyubiNo ratings yet
- Excellent Hex Key Wrench: English VersionDocument54 pagesExcellent Hex Key Wrench: English Versionmg pyaeNo ratings yet
- Pull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLineDocument7 pagesPull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLinecnuneza4No ratings yet
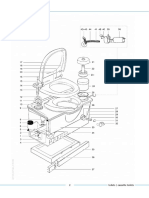
- Cassette toilet spare parts guide for models C2, C3 and C4Document21 pagesCassette toilet spare parts guide for models C2, C3 and C4georgedragosNo ratings yet
- FGGDocument12 pagesFGGSridharan VenkatNo ratings yet
- Smarter and Safer: Cordless Endodontic HandpieceDocument2 pagesSmarter and Safer: Cordless Endodontic Handpiecesonu1296No ratings yet
- Timing Chain Tensioner ResetDocument4 pagesTiming Chain Tensioner ResetHybrid RacingNo ratings yet
- Easygen-3000 Series (Package P1) Genset Control: InterfaceDocument102 pagesEasygen-3000 Series (Package P1) Genset Control: InterfacejinameNo ratings yet
- Setting vpn1Document10 pagesSetting vpn1Unink AanNo ratings yet
- End All Red Overdrive: Controls and FeaturesDocument6 pagesEnd All Red Overdrive: Controls and FeaturesBepe uptp5aNo ratings yet
- Demographically Similar EntriesDocument1 pageDemographically Similar EntriesTahsildar MydukurNo ratings yet
- TV Compatibility with Verbatim HDDsDocument2 pagesTV Compatibility with Verbatim HDDsmirciulicacatyNo ratings yet
- ITU ISUP Release Cause CodesDocument5 pagesITU ISUP Release Cause Codesdelgado08No ratings yet
- LV12 - Drive Shafts - Issue 1Document19 pagesLV12 - Drive Shafts - Issue 1Đức HòangNo ratings yet
- Struts by Kamalakar DanduDocument237 pagesStruts by Kamalakar DanduKamalakar DanduNo ratings yet
- Calgon Tech SpecDocument4 pagesCalgon Tech SpecDanStratoNo ratings yet
- Unit Conversion Heat TransferDocument5 pagesUnit Conversion Heat TransferFamela GadNo ratings yet
- New Schedule For Sunset Limited Benefits Passengers and Improves Financial PerformanceDocument3 pagesNew Schedule For Sunset Limited Benefits Passengers and Improves Financial Performanceapi-26433240No ratings yet
- Pen Holder SHSDocument16 pagesPen Holder SHSabhijeetbose1No ratings yet
- Zener DataDocument2 pagesZener Dataapi-27149887No ratings yet
- Inventory Management PreetDocument28 pagesInventory Management PreetKawalpreet Singh MakkarNo ratings yet
- Osha 1926.452Document14 pagesOsha 1926.452Binoy GopinathanNo ratings yet
- Electrical Measurements LabDocument40 pagesElectrical Measurements Labmdayyub100% (4)
- GOT2000 - UserManual Monitor - SH 081196 I PDFDocument614 pagesGOT2000 - UserManual Monitor - SH 081196 I PDFFanny Achmad Hindrarta KusumaNo ratings yet