You might also like
- Códigos de Falha Escavadeira HyundaiDocument8 pagesCódigos de Falha Escavadeira HyundaiGuemep Guemep100% (3)
- Design & Analysis of FanDocument96 pagesDesign & Analysis of FanMrudula Chintana91% (11)
- 10M134 AIC Assignment 1 & 2 PDFDocument14 pages10M134 AIC Assignment 1 & 2 PDFChandannnn92No ratings yet
- Ran 2005 Preliminary Design of A 2D Supersonic Inlet To Maximize Total PressureDocument11 pagesRan 2005 Preliminary Design of A 2D Supersonic Inlet To Maximize Total PressureEben JoachimNo ratings yet
- Massey Ferguson 8780 8780XP COMBINE (EFF SN W55101-HL87999) Parts Catalogue ManualDocument23 pagesMassey Ferguson 8780 8780XP COMBINE (EFF SN W55101-HL87999) Parts Catalogue ManualdidkskmdmdmNo ratings yet
- S04.s1 - Semana 04Document9 pagesS04.s1 - Semana 04Yadhira KiramNo ratings yet
- CO-4 Assignment QuestionsDocument7 pagesCO-4 Assignment QuestionsrajeswariNo ratings yet
- Challenge 20 Manual PDFDocument65 pagesChallenge 20 Manual PDFAlfonso Sanchez VerduzcoNo ratings yet
- Customized Spring and Damper of An AtvDocument6 pagesCustomized Spring and Damper of An AtvIAEME PublicationNo ratings yet
- Cad 1 Project FinalDocument19 pagesCad 1 Project FinalBill 007No ratings yet
- Ijmet 08 01 016Document6 pagesIjmet 08 01 016Shri Hari .SNo ratings yet
- Indian Institute of Technology Roorkee Mechanical & Industrial DepartmentDocument13 pagesIndian Institute of Technology Roorkee Mechanical & Industrial DepartmentGurpreet SinghNo ratings yet
- IC EnginesDocument7 pagesIC EnginesAmmar TahirNo ratings yet
- Fabrication and A Demonstration of Air Compressor: Bachelor of Technology IN Department of Mechanical EngineeringDocument8 pagesFabrication and A Demonstration of Air Compressor: Bachelor of Technology IN Department of Mechanical EngineeringPraveenNo ratings yet
- Design Report: HAWT Graduation ProjectDocument30 pagesDesign Report: HAWT Graduation ProjectMohamed MedhatNo ratings yet
- S. D. M. College of Engineering and Technology Dharwad-580002Document17 pagesS. D. M. College of Engineering and Technology Dharwad-580002Bharat HegdeNo ratings yet
- Frictionless Compressor Technology Seminar ReportDocument27 pagesFrictionless Compressor Technology Seminar ReportVishnu97% (39)
- Project Report VajDocument15 pagesProject Report VajTamil SelvanNo ratings yet
- Shock Absorber Power Generation B.techDocument45 pagesShock Absorber Power Generation B.techRahul Gujjar100% (1)
- PROJECT REPORT 2017-2018 Submitted by (Team Name) : Manual and Motorized BlowerDocument53 pagesPROJECT REPORT 2017-2018 Submitted by (Team Name) : Manual and Motorized Blowerimran kadriNo ratings yet
- Optimal Design of A Clutch Plate Using Ansys: V Mani Kiran Tipirineni, P. Punna RaoDocument5 pagesOptimal Design of A Clutch Plate Using Ansys: V Mani Kiran Tipirineni, P. Punna RaoInternational Journal of computational Engineering research (IJCER)No ratings yet
- Savonius Wind Turbine Design and Validation-An Manufacturing ApproachDocument8 pagesSavonius Wind Turbine Design and Validation-An Manufacturing ApproachMEER MUSTAFA ALINo ratings yet
- Modeling and Simulation of Wind Turbine Generator Using Matlab-SimulinkDocument20 pagesModeling and Simulation of Wind Turbine Generator Using Matlab-SimulinkAbhishek BhagatNo ratings yet
- 1.steam Turbine Rotor GroovesDocument7 pages1.steam Turbine Rotor GroovesRaheem JunaidiNo ratings yet
- Fabrication of Universal Tapping MachineDocument67 pagesFabrication of Universal Tapping MachineMuhammed Hashirkk0% (1)
- Design Miniature Wind TurbineDocument67 pagesDesign Miniature Wind TurbineGiridharan VenkateshNo ratings yet
- 8 Kamaland RahmanDocument11 pages8 Kamaland RahmanBinh NghiemNo ratings yet
- Report Mini Projek 100 JutaDocument42 pagesReport Mini Projek 100 JutaMuhammad A'zdhim GhazaliNo ratings yet
- Questionniares Ce & First AeDocument67 pagesQuestionniares Ce & First AeJack PotNo ratings yet
- Performance TestDocument18 pagesPerformance TestKumaran PalaniNo ratings yet
- Effect of Vortex Generators On Aerodynamics of A Car: CFD AnalysisDocument9 pagesEffect of Vortex Generators On Aerodynamics of A Car: CFD AnalysisAmritansh RanjanNo ratings yet
- MECH56Document4 pagesMECH56Rakesh ReddyNo ratings yet
- Design and Analysis of CrankshaftDocument35 pagesDesign and Analysis of CrankshaftAbijit Guda50% (6)
- Vibration Analysis of RoVibration Analysis of Rotary Compressorstary CompressorsDocument9 pagesVibration Analysis of RoVibration Analysis of Rotary Compressorstary CompressorsmshnrNo ratings yet
- Design and Analysis of Crankshaft For Single Cylinder 4-Stroke Deisel EngineDocument3 pagesDesign and Analysis of Crankshaft For Single Cylinder 4-Stroke Deisel EngineChetan GuptaNo ratings yet
- Piston Strength Analysis Using FEM: Swati S Chougule, Vinayak H KhatawateDocument8 pagesPiston Strength Analysis Using FEM: Swati S Chougule, Vinayak H KhatawateRam TirumalasettiNo ratings yet
- Turbine Construction (D ENG 18 0047 AE)Document7 pagesTurbine Construction (D ENG 18 0047 AE)Nidushan NethsaraNo ratings yet
- Pneumatic Vice Project ReportDocument58 pagesPneumatic Vice Project ReportEKAM Automation75% (4)
- Analysis and Optimaising of Pneumatic Loader Arm UsingDocument37 pagesAnalysis and Optimaising of Pneumatic Loader Arm UsingAjas YusufNo ratings yet
- Magnetic Levitation CompressorDocument21 pagesMagnetic Levitation CompressorNilesh PatelNo ratings yet
- Final Cpy - (Exp Study of Rotor With Wing Lets)Document44 pagesFinal Cpy - (Exp Study of Rotor With Wing Lets)yooki147No ratings yet
- Design of Machine Elements: Project ReportDocument12 pagesDesign of Machine Elements: Project ReportMuhammad BilalNo ratings yet
- Design and Construction of Vertical Axis Wind Turbine: November 2014Document9 pagesDesign and Construction of Vertical Axis Wind Turbine: November 2014Gautham NNo ratings yet
- Automatic Copper Wire Cutting MachineDocument79 pagesAutomatic Copper Wire Cutting Machinephoenixsiva100% (2)
- Shashank Report Final YearDocument12 pagesShashank Report Final YeararunadityaNo ratings yet
- Electric Cycle Project ReportDocument68 pagesElectric Cycle Project ReportARJUN S KNo ratings yet
- Electric Cycle Project ReportDocument68 pagesElectric Cycle Project ReportARJUN S KNo ratings yet
- Akash PDFDocument23 pagesAkash PDFAditya KumarNo ratings yet
- Rope Brake DynamometerDocument26 pagesRope Brake DynamometerPurvansh Vaikunthe100% (5)
- Mechanical Engineering Department Thermal Power Lab ME 529 Instructor: Prof Yousef AL-NajjarDocument7 pagesMechanical Engineering Department Thermal Power Lab ME 529 Instructor: Prof Yousef AL-Najjarahmad shaheenNo ratings yet
- CFD Ana S So Ai Bea NG: Ly I F R RiDocument4 pagesCFD Ana S So Ai Bea NG: Ly I F R RijoshibecNo ratings yet
- Mechanical Engineering)Document8 pagesMechanical Engineering)AmitSinghYadavNo ratings yet
- FlywheelDocument8 pagesFlywheelAidil Syawani Kun100% (1)
- Career Episode 2 Modelling and Simulation of Gas Turbine Blade Using Different MaterialsDocument7 pagesCareer Episode 2 Modelling and Simulation of Gas Turbine Blade Using Different MaterialsNishar Alam Khan 19MCD0042No ratings yet
- Chapter 4Document6 pagesChapter 4dsfdffdfNo ratings yet
- Engine Trials Supplementary NOTESDocument28 pagesEngine Trials Supplementary NOTESbarflybrianNo ratings yet
- Advance PneumaticDocument53 pagesAdvance PneumaticPRAVIN KUMAR ROYNo ratings yet
- Machine Design IIDocument23 pagesMachine Design IIBinar Arum OktaviaNo ratings yet
- Thevanesam Eruthaya Ammal PolytechniccollegeDocument44 pagesThevanesam Eruthaya Ammal PolytechniccollegeKamalmechNo ratings yet
- MINI Project Report: " Machine Design - I-LAB "Document23 pagesMINI Project Report: " Machine Design - I-LAB "Saket PatelNo ratings yet
- The Effect of Cylinder Type I-65° Staggered Upstream Convex Blade On The Aerodynamic Performance of The Savonius TurbineDocument10 pagesThe Effect of Cylinder Type I-65° Staggered Upstream Convex Blade On The Aerodynamic Performance of The Savonius TurbineGunawwan ZakktiNo ratings yet
- Multiphysics of Wind Turbines in Extreme Loading ConditionsFrom EverandMultiphysics of Wind Turbines in Extreme Loading ConditionsArash Soleiman FallahNo ratings yet
- Ec27c Pub20008959-CDocument487 pagesEc27c Pub20008959-CDiego MontenegroNo ratings yet
- Exterran Vent ListDocument10 pagesExterran Vent Listdilip matalNo ratings yet
- Approved Vendor ListDocument5 pagesApproved Vendor Listhmcoltd.mumbaiNo ratings yet
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDocument60 pagesMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghNo ratings yet
- Dom Notes Flywheel Unit 4Document36 pagesDom Notes Flywheel Unit 4Mohammed FarhanNo ratings yet
- ME 383 - Lesson 6 - Cam and FollowerDocument8 pagesME 383 - Lesson 6 - Cam and FollowerNanip, karen D BSME-1CNo ratings yet
- Driving To The Future: Product Catalogue: CLUTCHES & FLYWHEEL ASSYDocument48 pagesDriving To The Future: Product Catalogue: CLUTCHES & FLYWHEEL ASSYmanoj_doshi_1100% (2)
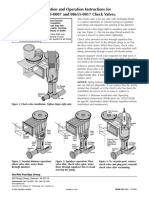
- Installation and Operation Instructions For No. 08655-0007 and 08655-0017 Check ValvesDocument1 pageInstallation and Operation Instructions For No. 08655-0007 and 08655-0017 Check Valves薛泽绵No ratings yet
- TestDocument51 pagesTestRenato OrosaNo ratings yet
- Design of Modern CNC Machines and Mechatronic ElementsDocument37 pagesDesign of Modern CNC Machines and Mechatronic Elementsnagappa talawarNo ratings yet
- H Series Valves-EnDocument12 pagesH Series Valves-EnWalther Ernesto Molina DominguezNo ratings yet
- SCIENCE 9 Quarter 4 Assessment TestDocument5 pagesSCIENCE 9 Quarter 4 Assessment TestAngelita MenesesNo ratings yet
- Presentation 1Document22 pagesPresentation 1Divyansh SinghNo ratings yet
- John Deere - Parts Catalog - Frame 5 IIDocument1 pageJohn Deere - Parts Catalog - Frame 5 IItatasoy67% (3)
- Reciprocating Compressor Condition Monitoring - GEDocument6 pagesReciprocating Compressor Condition Monitoring - GEBao-Phuc NguyenNo ratings yet
- Roller Chain Connect Disconnect July 2006 PDFDocument7 pagesRoller Chain Connect Disconnect July 2006 PDFl_aguilar_mNo ratings yet
- Hybrid VehicleDocument26 pagesHybrid VehicleakashNo ratings yet
- Panasonic Motor Selection GuideDocument6 pagesPanasonic Motor Selection GuideAnnish KumarNo ratings yet
- LTM 1070-4.1 PN PDFDocument16 pagesLTM 1070-4.1 PN PDFnamduong368No ratings yet
- Converter Cat1 2 PDFDocument242 pagesConverter Cat1 2 PDFMarcos MontesNo ratings yet
- Regular Parts Catalogue Inclusive 235DI 245DI 12MAY09Document268 pagesRegular Parts Catalogue Inclusive 235DI 245DI 12MAY09PSChatrathNo ratings yet
- Spare Parts Catalog: 4 WG 200 (555/5) (Current Date: 15.11.2012) Material Number: 4644.024.161Document92 pagesSpare Parts Catalog: 4 WG 200 (555/5) (Current Date: 15.11.2012) Material Number: 4644.024.161Mourad Chabchoub100% (1)
- Super Multi Catalogue PDFDocument36 pagesSuper Multi Catalogue PDFWai Lwin KoNo ratings yet
- Engine: Engine Mechanical (4Hk1, 6Hk1)Document178 pagesEngine: Engine Mechanical (4Hk1, 6Hk1)dmitry esaulkovNo ratings yet
- 308CCR Series Spec SheetDocument24 pages308CCR Series Spec SheetBang Kojek100% (4)