You might also like
- Construccion y Programacion de Un Robot Bipedo Controlado Por Arduino y Un Modulo Bluetooth HC 06 para La Caminata de Superficies PlanasDocument31 pagesConstruccion y Programacion de Un Robot Bipedo Controlado Por Arduino y Un Modulo Bluetooth HC 06 para La Caminata de Superficies PlanasJordi AlorNo ratings yet
- Practicas en Labview, EjemplosDocument45 pagesPracticas en Labview, EjemplosJosafat JaramilloNo ratings yet
- MANUAL DE MATLAB Y LABVIEW PARA ADQUISICIÓN Y ANÁLISIS DE DATOSDocument22 pagesMANUAL DE MATLAB Y LABVIEW PARA ADQUISICIÓN Y ANÁLISIS DE DATOSDiego Frias ParedesNo ratings yet
- Tutorial ATmegaDocument17 pagesTutorial ATmegajubjub92No ratings yet
- Bascula Ganadera Electronica Elite 3.000Document10 pagesBascula Ganadera Electronica Elite 3.000mooNo ratings yet
- Informe Puente H L298NDocument10 pagesInforme Puente H L298NEmilio EscalanteNo ratings yet
- Tutorial L298Document9 pagesTutorial L298pesadilla0No ratings yet
- Ardurobotronica Manu4d90cbb599316Document34 pagesArdurobotronica Manu4d90cbb599316Geiner David GranielNo ratings yet
- Módulo L298NDocument7 pagesMódulo L298NAlexanderAlexisOñaNo ratings yet
- Tutorial L298NDocument9 pagesTutorial L298NAnonymous H3E7i3YzydNo ratings yet
- Manual de Desarrollo de Un Robot Móvil (Seguidor de Línea)Document4 pagesManual de Desarrollo de Un Robot Móvil (Seguidor de Línea)Anthony Alexander Porras UxofenNo ratings yet
- Catalogo Bricogeek 13-08-2022Document77 pagesCatalogo Bricogeek 13-08-2022vicenteNo ratings yet
- 2-2) Diseño de Un Robot Autonomo PDFDocument68 pages2-2) Diseño de Un Robot Autonomo PDFJorge Luis Vargas FloresNo ratings yet
- Estructuras LabviewDocument62 pagesEstructuras LabviewVictor GonzalezNo ratings yet
- Introduccion LabVIEW - Seis HorasDocument45 pagesIntroduccion LabVIEW - Seis HorasAleksei Vasquez100% (1)
- Conjunto de Instrucciones... PICDocument20 pagesConjunto de Instrucciones... PICJose Eduardo Pumarejo GarciaNo ratings yet
- PicBasic PRO CompilerDocument25 pagesPicBasic PRO CompilerkemetvictNo ratings yet
- Trabajo Domótica PDFDocument25 pagesTrabajo Domótica PDFAlberto Freire MartinezNo ratings yet
- Manual HFK 010uDocument10 pagesManual HFK 010ujonathanNo ratings yet
- Curso de Robótica 1Document9 pagesCurso de Robótica 1Guillermo Chacon AcevedoNo ratings yet
- Comandos básicos Arduino LED encendidoDocument4 pagesComandos básicos Arduino LED encendidoZuleyma ArroyoNo ratings yet
- Programación en Pic C Compiler PDFDocument9 pagesProgramación en Pic C Compiler PDFSchaddaiCruzNo ratings yet
- 13 Proyectos Maker Con Raspberry Pi Arduino y Microbit Perfectos para Hacer Este VeranoDocument6 pages13 Proyectos Maker Con Raspberry Pi Arduino y Microbit Perfectos para Hacer Este VeranohenriorlandoNo ratings yet
- La Conversión de Analógico A DigitalDocument15 pagesLa Conversión de Analógico A DigitalGustavo Leyva EspezúaNo ratings yet
- Semana6 Arduino PLCDocument56 pagesSemana6 Arduino PLCManuel Sanchez CheroNo ratings yet
- Tutorial Soft ESP32Document15 pagesTutorial Soft ESP32cynthiNo ratings yet
- PIC Con PIC Ide Simulator BasicDocument67 pagesPIC Con PIC Ide Simulator BasicAlexander Caceres67% (3)
- Contador ascendente y LED parDocument3 pagesContador ascendente y LED parAsesorias PipeNo ratings yet
- ARDUINO + PROCESSING - PRIMEROS PASOS - DIYMakersDocument19 pagesARDUINO + PROCESSING - PRIMEROS PASOS - DIYMakerslm7410% (1)
- Programación de RobotsDocument12 pagesProgramación de Robotsdavid_kunNo ratings yet
- Servo Control 1Document10 pagesServo Control 1Cupyl LunaNo ratings yet
- Más de 250 Ideas de Miniproyectos de Electrónica para Estudiantes de IngenieríaDocument24 pagesMás de 250 Ideas de Miniproyectos de Electrónica para Estudiantes de IngenieríaRicardo MCNo ratings yet
- Manual PICCITO 16F88Document9 pagesManual PICCITO 16F88Jose Chambilla100% (1)
- ADC Con Pico-BlazeDocument13 pagesADC Con Pico-BlazeIvan RomoNo ratings yet
- Pro Yecto Arduino 3Document181 pagesPro Yecto Arduino 3Carlos De La Rosa SanchezNo ratings yet
- ROBOT LEGO MINDSTORM EV3 Programado ParDocument22 pagesROBOT LEGO MINDSTORM EV3 Programado ParAlbert SerwayNo ratings yet
- PreP05 Comunicacion USB PC VB y PIC18F4550 MikroCDocument2 pagesPreP05 Comunicacion USB PC VB y PIC18F4550 MikroCxoroger100% (1)
- PLC ToshibaDocument58 pagesPLC Toshibafitz2012No ratings yet
- PCB LayoutDocument23 pagesPCB LayoutAlex CortezNo ratings yet
- ArduinoDocument14 pagesArduinombomfim432No ratings yet
- Sistema Operativo Microcontroladores Pic RtosDocument22 pagesSistema Operativo Microcontroladores Pic RtosJean Carlos Herrera PérezNo ratings yet
- Informe Seguidor de Linea4Document29 pagesInforme Seguidor de Linea4Fernando NancoNo ratings yet
- Tutorial C18Document100 pagesTutorial C18Eduardo Garcia BreijoNo ratings yet
- Introducción Pic18F4550Document13 pagesIntroducción Pic18F4550Lázaro López PuenteNo ratings yet
- Funcionamiento Encoder PuentehDocument5 pagesFuncionamiento Encoder PuentehgerNo ratings yet
- Control de Motores Paso A Paso Con ArduinoDocument35 pagesControl de Motores Paso A Paso Con ArduinoEfrainRodrigoAjataNo ratings yet
- Practica Motores DC Con ArduinoDocument6 pagesPractica Motores DC Con ArduinoROBERTO KARLO CAMPOS TIRADONo ratings yet
- Tutorial Uso Driver L298N para Motores DC y Paso A Paso Con ArduinoDocument52 pagesTutorial Uso Driver L298N para Motores DC y Paso A Paso Con ArduinoLUIS LORENZO MORALES ARBOLEDANo ratings yet
- Control de Motores DC Con ARDUINO PDFDocument13 pagesControl de Motores DC Con ARDUINO PDFHectorJoseMojicaOrtizNo ratings yet
- Guia de Laboratorio 3, 4 UNIFRANZDocument9 pagesGuia de Laboratorio 3, 4 UNIFRANZjhoselinNo ratings yet
- BASICO Uso de Driver L298N para Motores DC y Paso A Paso Con ArduinoDocument4 pagesBASICO Uso de Driver L298N para Motores DC y Paso A Paso Con ArduinoCavallin CarlosNo ratings yet
- Lab 3 Robotica 29Document8 pagesLab 3 Robotica 29arminNo ratings yet
- Motores de Corriente ContinuaDocument9 pagesMotores de Corriente ContinuajbuabudNo ratings yet
- Placa L298NDocument4 pagesPlaca L298NAlexandra DklNo ratings yet
- El Control de 2 Motores Con El TB6612FNGDocument14 pagesEl Control de 2 Motores Con El TB6612FNGValeria Hernandez ChavezNo ratings yet
- El Control de 2 Motores Con El TB6612FNGDocument14 pagesEl Control de 2 Motores Con El TB6612FNGValeria Hernandez ChavezNo ratings yet
- Módulo - 14 CA Driver L298NDocument9 pagesMódulo - 14 CA Driver L298NCarlos BeitiaNo ratings yet
- Bluetooth Puente H y Un MotorDocument9 pagesBluetooth Puente H y Un MotorNasly JimenoNo ratings yet
- Lección 16 Controlar Un Motor de Pasos Con Un Mando A DistanciaDocument10 pagesLección 16 Controlar Un Motor de Pasos Con Un Mando A DistanciaOziel CaballeroNo ratings yet
- HL293DDocument15 pagesHL293DRosio Evaristo VivarNo ratings yet
- _Práctica 1 RPi Entradas y Salidas DigitalesDocument15 pages_Práctica 1 RPi Entradas y Salidas Digitalesl21210471No ratings yet
- Invamp 1 Invamp 1 Invamp 1 Invamp 1Document1 pageInvamp 1 Invamp 1 Invamp 1 Invamp 1Onofre DanielNo ratings yet
- HF Cutoff HF CutoffHf CutoffHf CutoffDocument4 pagesHF Cutoff HF CutoffHf CutoffHf CutoffOnofre DanielNo ratings yet
- Presentacion Universia SemiconductoresDocument36 pagesPresentacion Universia SemiconductoresJose Rafael CentenoNo ratings yet
- Identificacion Sistemas Segundo OrdenDocument9 pagesIdentificacion Sistemas Segundo OrdenOnofre DanielNo ratings yet
- Decibels PDFDocument2 pagesDecibels PDFDoncan Corleone100% (1)
- Rivero Realimentacion 01Document28 pagesRivero Realimentacion 01Javier AhumadaNo ratings yet
- f02 Lec18 PDFDocument19 pagesf02 Lec18 PDFOnofre DanielNo ratings yet
- HF Hybridpi1 PDFDocument1 pageHF Hybridpi1 PDFDoncan CorleoneNo ratings yet
- 0001-Distintos Tipos de DiodosDocument1 page0001-Distintos Tipos de DiodosdanerystNo ratings yet
- Lineas de CargaDocument7 pagesLineas de CargaJorge OrtegaNo ratings yet
- Bias Stability Bias StabilityBias StabilityBias StabilityDocument4 pagesBias Stability Bias StabilityBias StabilityBias StabilityOnofre DanielNo ratings yet
- F02-Lec14 F02-Lec14f02-Lec14Document43 pagesF02-Lec14 F02-Lec14f02-Lec14Onofre DanielNo ratings yet
- 01-Poder CalorificoDocument22 pages01-Poder CalorificoDany Daniel Oblitas SoteloNo ratings yet
- 1-Medidas Electr - Ónicas IDocument13 pages1-Medidas Electr - Ónicas IdebihigaNo ratings yet
- TP2 dispoTP2 dispoTP2 dispoTP2 DispoDocument6 pagesTP2 dispoTP2 dispoTP2 dispoTP2 DispoOnofre DanielNo ratings yet
- TP3 Dispo TP3 dispoTP3 dispoTP3 DispoDocument9 pagesTP3 Dispo TP3 dispoTP3 dispoTP3 DispoOnofre DanielNo ratings yet
- TP1dispo TP1dispoTP1dispo TP1dispoDocument14 pagesTP1dispo TP1dispoTP1dispo TP1dispoOnofre DanielNo ratings yet
- Electrónica Aplicada II - Tulic - Cap15Document20 pagesElectrónica Aplicada II - Tulic - Cap15veron31No ratings yet
- TPN7 FlexiónDocument3 pagesTPN7 FlexiónOnofre DanielNo ratings yet
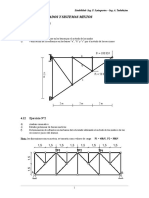
- TP N4 - Reticulados y Sistemas MixtosDocument2 pagesTP N4 - Reticulados y Sistemas MixtosOnofre DanielNo ratings yet
- Copia de Solución TPNº1Document32 pagesCopia de Solución TPNº1Onofre DanielNo ratings yet
- Fisica 2010 1utnDocument35 pagesFisica 2010 1utnPaulo SelickiNo ratings yet
- Formula Blackman ImpedanciaDocument9 pagesFormula Blackman ImpedanciaFlores JesusNo ratings yet
- Fisica 2010 2Document45 pagesFisica 2010 2Harry LvnaNo ratings yet
- Fluidos 02 GasolinaDocument31 pagesFluidos 02 GasolinaAnonymous lSEnEklZ7No ratings yet
- Ejercicio EstabilidadDocument1 pageEjercicio EstabilidadOnofre DanielNo ratings yet
- TP n1 - Sistemas de FuerzasDocument2 pagesTP n1 - Sistemas de FuerzasOnofre DanielNo ratings yet
- Hist Ecuac Diferenciales 01Document3 pagesHist Ecuac Diferenciales 01Iver LopezNo ratings yet
- 3° Decibel Explicacion Completa Mas Formula de CalculoDocument5 pages3° Decibel Explicacion Completa Mas Formula de CalculoarcontmeNo ratings yet
- 2do Parcial 14-02-11 SoluciònDocument8 pages2do Parcial 14-02-11 SoluciònleoxsNo ratings yet
- Diseño Data CenterDocument94 pagesDiseño Data CenterKeny Oscar Cortes GonzalezNo ratings yet
- Examen Ccna 1 y 2Document10 pagesExamen Ccna 1 y 2Jose FrancoNo ratings yet
- Caculadora Amor, Juego de Contactos, Encuentra Quien Te QuiereDocument1 pageCaculadora Amor, Juego de Contactos, Encuentra Quien Te QuiereIrlanda Sinaí CisnerosNo ratings yet
- SIMATIC TemporizadoresDocument17 pagesSIMATIC TemporizadoresFrank Ruiz MitteennNo ratings yet
- Accidente Piper Alpha: Análisis mediante diagrama de espina de pescadoDocument3 pagesAccidente Piper Alpha: Análisis mediante diagrama de espina de pescadoViviana MuñozNo ratings yet
- Organizadores Gráficos, AuditoríaDocument5 pagesOrganizadores Gráficos, Auditoríagrupom02100% (3)
- Introduccion A Las Herramientas Informaticas para Los ContadoresDocument69 pagesIntroduccion A Las Herramientas Informaticas para Los Contadoresluis231285No ratings yet
- PRACTICANo5 Aplicacion Del BJTDocument7 pagesPRACTICANo5 Aplicacion Del BJTJulian GarciaNo ratings yet
- Estructura de Buses Compartidos para Microprocesadores Y MicrocontroladoresDocument17 pagesEstructura de Buses Compartidos para Microprocesadores Y MicrocontroladoresMarco de SantiagoNo ratings yet
- DDDDDocument14 pagesDDDDDarwin Yonel Mamani SalcedoNo ratings yet
- Claves de MedicinaDocument10 pagesClaves de MedicinaWavi LuNo ratings yet
- Manual de Servicio-Válvula de Control Fleck 2850 PDFDocument52 pagesManual de Servicio-Válvula de Control Fleck 2850 PDFel doctol100% (1)
- Cálculo de La CriticidadDocument4 pagesCálculo de La Criticidadangel6459No ratings yet
- Reqs Soft EspecificaciónDocument23 pagesReqs Soft EspecificaciónJhobnatanRosarioSantosNo ratings yet
- Trabajo Cadena de Markov 2020 - IIDocument4 pagesTrabajo Cadena de Markov 2020 - IITheHabilmasterNo ratings yet
- Cómo Calibrar La Batería de Un Móvil AndroidDocument3 pagesCómo Calibrar La Batería de Un Móvil AndroidJohn Condorcet JimenezNo ratings yet
- Investigacion Cuadro ComparativoDocument6 pagesInvestigacion Cuadro ComparativoElenna RuiizNo ratings yet
- Propuesta SEO - Sem - DogmaDocument15 pagesPropuesta SEO - Sem - DogmaJorge de la CruzNo ratings yet
- Perspectiva Historica Del InternetDocument7 pagesPerspectiva Historica Del InternetJisela HernandezNo ratings yet
- Proyecto 4 Primer GradoDocument70 pagesProyecto 4 Primer GradoFireXXXNo ratings yet
- Gestion para Establecimientos de Alimentos y BebidasDocument59 pagesGestion para Establecimientos de Alimentos y Bebidaslicetpatricia83% (6)
- Manual Nos Mueve La Paz PDFDocument46 pagesManual Nos Mueve La Paz PDFEsteban EspinosaNo ratings yet
- 3000SProductBrochure SP!!!Document3 pages3000SProductBrochure SP!!!Javier RamirezNo ratings yet
- Presentacion Biblioteca VirtualDocument20 pagesPresentacion Biblioteca VirtualMarcos JongueNo ratings yet
- Informe Definitivo Plan de Continuidad de NegocioDocument25 pagesInforme Definitivo Plan de Continuidad de NegocioronaldoskyNo ratings yet
- Valor Agregado (OFV)Document4 pagesValor Agregado (OFV)Francisco LaraNo ratings yet
- Informe Lab1 Sdi1Document8 pagesInforme Lab1 Sdi1MaticarolinaNo ratings yet
- Guia 5Document2 pagesGuia 5Sofia GaviriaNo ratings yet
- Diagrama de Gantt ProyectoDocument5 pagesDiagrama de Gantt Proyectojessica dominguezNo ratings yet