You might also like
- Nichols ChartDocument9 pagesNichols ChartJin Sung AhnNo ratings yet
- Wide Swing Cascode Current MirrorDocument4 pagesWide Swing Cascode Current MirrorSunil M. PaiNo ratings yet
- C 3Document47 pagesC 3Saurabh SharmaNo ratings yet
- MD Singh Power Electronics Solution Manual To Chapter 15Document15 pagesMD Singh Power Electronics Solution Manual To Chapter 15Anoop MathewNo ratings yet
- Bode PlotDocument7 pagesBode Plotnabilo20No ratings yet
- All Classroom Class ExamplesDocument51 pagesAll Classroom Class ExamplesAhmed Sabri0% (1)
- EEE3001 Software ManualDocument34 pagesEEE3001 Software ManualManuDubeyNo ratings yet
- DC - Ac Inv.Document82 pagesDC - Ac Inv.Jegadeeswari GNo ratings yet
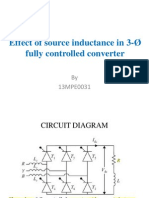
- Effect of Source Inductance in 3Ø Full WaveDocument12 pagesEffect of Source Inductance in 3Ø Full WaveUmashankar Subramaniam100% (1)
- Transformer Less POWER SUPPLY REPORTDocument7 pagesTransformer Less POWER SUPPLY REPORTضياء بن احمد الكباري67% (3)
- Buck Converter Using ArduinoDocument12 pagesBuck Converter Using ArduinoaaqibNo ratings yet
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- Intensity ModulationDocument3 pagesIntensity Modulationanon-323096100% (1)
- Chapter 7 of Fundamentals of MicroelectronicsDocument33 pagesChapter 7 of Fundamentals of MicroelectronicsjenellaneNo ratings yet
- Economic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleDocument26 pagesEconomic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleAdisuNo ratings yet
- Electromagnetic Fields II-SummerDocument39 pagesElectromagnetic Fields II-SummerMINESY60% (5)
- EC - Lab Manul With Viva Questions and AnswersDocument83 pagesEC - Lab Manul With Viva Questions and AnswerssunandaalurNo ratings yet
- VHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationDocument6 pagesVHDL Based Circuits Design and Synthesis On FPGA: A Dice Game Example For EducationRam RajaNo ratings yet
- Experiment No:-07 DATE:24-09-20 Aim: To Realize Log and Antilog Amplifier Using Op-AmpDocument9 pagesExperiment No:-07 DATE:24-09-20 Aim: To Realize Log and Antilog Amplifier Using Op-AmpJainil ShahNo ratings yet
- Lab Manual - TheoryDocument49 pagesLab Manual - TheoryLovely VinayNo ratings yet
- Unit Vii Fet AmplifiersDocument14 pagesUnit Vii Fet AmplifiersAadarsha timilsinaNo ratings yet
- Solutions To Skill Assessment ProblemsDocument53 pagesSolutions To Skill Assessment ProblemsMuhammad ArslanNo ratings yet
- FET BiasingDocument48 pagesFET Biasingbetteralwz100% (3)
- CH4 2Document55 pagesCH4 2Imran AbdullahNo ratings yet
- Lecs 2 After MidtermDocument41 pagesLecs 2 After MidtermAbdalkader Alibrahim100% (1)
- Arduino SPWM Sine InverterDocument5 pagesArduino SPWM Sine InvertermaurilioctbaNo ratings yet
- Unit6 Resonance Circuit (VTU)Document23 pagesUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- Laplace Transform ExamplesDocument19 pagesLaplace Transform Exampleshamza abdo mohamoudNo ratings yet
- InverterDocument53 pagesInverterAgus SetyawanNo ratings yet
- Uniform Plane WaveDocument57 pagesUniform Plane WavePuneeth SiddappaNo ratings yet
- Chapter Two Differential Amplifiers 2nd LectureDocument35 pagesChapter Two Differential Amplifiers 2nd LectureTemesgen MekonenNo ratings yet
- FiltersDocument20 pagesFiltersSRINIKHIL GollaNo ratings yet
- Course Objective: To Design Microwave AmplifierDocument3 pagesCourse Objective: To Design Microwave AmplifierAshwini KothavaleNo ratings yet
- Switch CapacitorDocument90 pagesSwitch CapacitorVaibhav Khurana100% (1)
- Thyristor Ratings and Protection PDFDocument4 pagesThyristor Ratings and Protection PDFAmit ParchakeNo ratings yet
- SCR Firing CircuitsDocument4 pagesSCR Firing CircuitsShubham BagalNo ratings yet
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDocument4 pagesECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqNo ratings yet
- Microcontroller Lab ManualDocument38 pagesMicrocontroller Lab Manualharshitha100% (1)
- Chapter 2: Mathematical Modelling of Translational Mechanical SystemDocument8 pagesChapter 2: Mathematical Modelling of Translational Mechanical SystemNoor Nadiah Mohd Azali100% (1)
- AC Drives Tutorial - 1, 2, 3, 4-1Document8 pagesAC Drives Tutorial - 1, 2, 3, 4-1PrakashNo ratings yet
- Module2-Signals and SystemsDocument21 pagesModule2-Signals and SystemsAkul PaiNo ratings yet
- ME2142 T1 SolnDocument5 pagesME2142 T1 SolnDonguk Kim100% (1)
- Full Wave Controlled Centre Tap RectifierDocument11 pagesFull Wave Controlled Centre Tap RectifierUmashankar Subramaniam100% (1)
- Waveguides Written ReportDocument10 pagesWaveguides Written Reporttareq omarNo ratings yet
- Power Electronics ManualDocument61 pagesPower Electronics ManualS Piyush Piyush0% (1)
- Traffic Light ControllerDocument24 pagesTraffic Light Controllerசெல்வம் முத்துராமன்100% (1)
- Module3-Signals and SystemsDocument28 pagesModule3-Signals and SystemsAkul PaiNo ratings yet
- EEE F427 - Lecture 6Document29 pagesEEE F427 - Lecture 6james40440No ratings yet
- Bode Plots: Multiple Choice Questions For Online ExamDocument23 pagesBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtNo ratings yet
- HW 6 SolnDocument9 pagesHW 6 SolnGeno Abbascia0% (1)
- Design Considerations For An LLC Resonant ConverterDocument29 pagesDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356No ratings yet
- Partial Fraction Decompositions 2Document8 pagesPartial Fraction Decompositions 2hz_hridoyNo ratings yet
- Partial Fraction DecompositionsDocument8 pagesPartial Fraction Decompositionshz_hridoyNo ratings yet
- Assignment 9Document12 pagesAssignment 9Shawn DeolNo ratings yet
- Yeek08 2014 IIIB5Document41 pagesYeek08 2014 IIIB5LeungSiuYapNo ratings yet
- Solution HW3Document8 pagesSolution HW3ผม เพื่อนตุ้มNo ratings yet
- Maths N Chem. SolnDocument4 pagesMaths N Chem. SolnAastikUdeniaNo ratings yet
- Ch7 1laplace Transform 1Document15 pagesCh7 1laplace Transform 1Meor AimanNo ratings yet
- Nguyen Le Quang 1852696 Homework #3: K Gs SsDocument8 pagesNguyen Le Quang 1852696 Homework #3: K Gs SsKiet PhamNo ratings yet
- 8-Lead Standard Small Outline PackageDocument1 page8-Lead Standard Small Outline PackageKgotsofalang Kayson NqhwakiNo ratings yet
- CV Guidelines, Best of The Best University of Cape TownDocument2 pagesCV Guidelines, Best of The Best University of Cape TownKgotsofalang Kayson NqhwakiNo ratings yet
- Richard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFDocument274 pagesRichard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFKgotsofalang Kayson NqhwakiNo ratings yet
- Handbook of MPC TOCDocument5 pagesHandbook of MPC TOCKgotsofalang Kayson NqhwakiNo ratings yet
- 11 Sliding Mode ControlDocument9 pages11 Sliding Mode ControlKgotsofalang Kayson NqhwakiNo ratings yet
- Letseng Diamonds Plant 2 DocumentationDocument14 pagesLetseng Diamonds Plant 2 DocumentationKgotsofalang Kayson NqhwakiNo ratings yet
- MEC2022S+Final ExamDocument3 pagesMEC2022S+Final ExamKgotsofalang Kayson NqhwakiNo ratings yet
- EEE1000X Practical Training Report FormDocument1 pageEEE1000X Practical Training Report FormKgotsofalang Kayson NqhwakiNo ratings yet
- Machine Learning Mastery With Weka SampleDocument20 pagesMachine Learning Mastery With Weka SampleSha ShaikNo ratings yet
- 7th Fall 2023 - Last Version - XLSX - Google SheetsDocument1 page7th Fall 2023 - Last Version - XLSX - Google SheetsAzza ShoukrNo ratings yet
- KIET Group of Institutions: PUE Examination (2021-2022) EVEN SemesterDocument3 pagesKIET Group of Institutions: PUE Examination (2021-2022) EVEN SemesterakttripathiNo ratings yet
- Solved Exercises ch08Document4 pagesSolved Exercises ch08sadiaNo ratings yet
- 6 Transform-Domain Approaches: 6.1 MotivationDocument46 pages6 Transform-Domain Approaches: 6.1 MotivationCHARLES MATHEWNo ratings yet
- Minggu 2 Dan 3 - Stability PDFDocument43 pagesMinggu 2 Dan 3 - Stability PDFFahmi RizalNo ratings yet
- It2302-Information Theory and Coding Unit - IDocument17 pagesIt2302-Information Theory and Coding Unit - IVasuki JayabalNo ratings yet
- Eccv10ppt PDFDocument30 pagesEccv10ppt PDFRohman AjiNo ratings yet
- An Expert System Based On Optimized Stacked Support Vector Machines For Effective Diagnosis of Heart DiseaseDocument9 pagesAn Expert System Based On Optimized Stacked Support Vector Machines For Effective Diagnosis of Heart DiseaseMuzamilNo ratings yet
- Chap10 - 8up - Boundary Value Problems For ODEsDocument6 pagesChap10 - 8up - Boundary Value Problems For ODEsagcoreNo ratings yet
- CS781 Lecture0Document23 pagesCS781 Lecture0Geethika ChamanaNo ratings yet
- 300+ TOP DATA MINING Multiple Choice Questions and AnswersDocument10 pages300+ TOP DATA MINING Multiple Choice Questions and Answersعمار طعمةNo ratings yet
- Exam 2020 With SolutionsDocument7 pagesExam 2020 With SolutionsAnushree JainNo ratings yet
- MeshingDocument9 pagesMeshingasdfasdfNo ratings yet
- Quiz 2Document8 pagesQuiz 2danaNo ratings yet
- Method of Differentiation DPP - 7Document3 pagesMethod of Differentiation DPP - 7tanayNo ratings yet
- AmortizedAnalysis Lect0206Document6 pagesAmortizedAnalysis Lect0206Vinay MishraNo ratings yet
- 8-Lecture 39 TF To SS and SS To TF ConversionDocument18 pages8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanNo ratings yet
- Outline: - Univariate Search Method - Hooke-Jeeves Method - Nelder-Mead Simplex MethodDocument21 pagesOutline: - Univariate Search Method - Hooke-Jeeves Method - Nelder-Mead Simplex Method6 avinashNo ratings yet
- Cryptography: - Digital SignaturesDocument21 pagesCryptography: - Digital SignaturessravnumasNo ratings yet
- Determinnant 3 by 3 Matrix PracticeDocument4 pagesDeterminnant 3 by 3 Matrix PracticeSaherNo ratings yet
- Characterization of Yarn Diameter Measured On Different: S. Ibrahim, J. Militky, D. Kremenakova and R.MishraDocument15 pagesCharacterization of Yarn Diameter Measured On Different: S. Ibrahim, J. Militky, D. Kremenakova and R.MishraGhandi AhmadNo ratings yet
- Remainder TheoremDocument26 pagesRemainder TheoremLyka Diane GagalangNo ratings yet
- Aakib Prac2 (B)Document3 pagesAakib Prac2 (B)Jasmi YadavNo ratings yet
- Case Study Using The Graphical MethodDocument6 pagesCase Study Using The Graphical MethodA.M.A67% (3)
- Interconnection and Damping Assignment Passivity-Based Control: A SurveyDocument19 pagesInterconnection and Damping Assignment Passivity-Based Control: A SurveyAntonioNo ratings yet
- MRAC Based PI Controller For Speed Control of D.C. Motor Using Lab ViewDocument6 pagesMRAC Based PI Controller For Speed Control of D.C. Motor Using Lab ViewlaidNo ratings yet
- The Control of ConfoundingDocument2 pagesThe Control of ConfoundingsamuelNo ratings yet
- Vijendra Singh Home Work-1 of CryptoDocument8 pagesVijendra Singh Home Work-1 of CryptoVijendra Singh BhamuNo ratings yet
- Data Hiding With Deep Learning A Survey Unifying Digital Watermarking and SteganographyDocument15 pagesData Hiding With Deep Learning A Survey Unifying Digital Watermarking and Steganographyfebaxag385No ratings yet