You might also like
- Afnor: DTU P22-702Document249 pagesAfnor: DTU P22-702محمد أشرف المزوغي50% (2)
- 2015 - CH153Document6 pages2015 - CH153Cristian Villa SiordiaNo ratings yet
- Rapport - Effet ZeemanDocument31 pagesRapport - Effet ZeemanPierre-Cécil KönigNo ratings yet
- Prédiction Des Prix Immobiliers en Utilisant Les Modèles de RégressionDocument15 pagesPrédiction Des Prix Immobiliers en Utilisant Les Modèles de RégressionhibaNo ratings yet
- Efficiency of Pile Groups Installed in Cohesion LessDocument9 pagesEfficiency of Pile Groups Installed in Cohesion Lessmsafa63No ratings yet
- Guide Pour Lapplication de Leurocode 2 - EGF - BTP - UMGO PDFDocument41 pagesGuide Pour Lapplication de Leurocode 2 - EGF - BTP - UMGO PDFRachida TchagbeleNo ratings yet
- Geo Melaka Syit 113 - 28 Mei 2012Document1 pageGeo Melaka Syit 113 - 28 Mei 2012Farid AhmadNo ratings yet
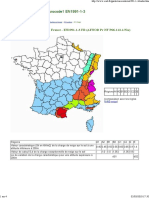
- EN 1991-1-3 - AN - Régions de Neige FRDocument4 pagesEN 1991-1-3 - AN - Régions de Neige FRmarcoalvarezdbNo ratings yet
- CNC2M N0095 REC Application NF en 1993-1-1 Version 2 Mars 2014Document10 pagesCNC2M N0095 REC Application NF en 1993-1-1 Version 2 Mars 2014Triki SamirNo ratings yet
- A General Hand Method of Analysis For Tall Building Structures Subject To Lateral LoadsDocument229 pagesA General Hand Method of Analysis For Tall Building Structures Subject To Lateral LoadssongkkNo ratings yet
- ACCROPODE™ I - Table de Conception - FR - 2012 - 0Document4 pagesACCROPODE™ I - Table de Conception - FR - 2012 - 0elamigosolitarioNo ratings yet
- Complements Rpa Final1Document17 pagesComplements Rpa Final1AliSlimaniNo ratings yet
- FR DTU P06-002 Fevrier 2009 - I112402FRDocument227 pagesFR DTU P06-002 Fevrier 2009 - I112402FRRamzi HidarNo ratings yet
- Tarifs Acier ConstructionDocument12 pagesTarifs Acier ConstructionNajib TahirNo ratings yet
- NF en 1991 1 4 Partie 1 4 PDFDocument7 pagesNF en 1991 1 4 Partie 1 4 PDFradusumedrea100% (1)
- Note de Calcul PortiqueDocument47 pagesNote de Calcul PortiqueAbdelilah ElmahsaniNo ratings yet
- Pile Displacement by Fleming (1992) PDFDocument15 pagesPile Displacement by Fleming (1992) PDFHemant YesajiNo ratings yet
- Robot New KhmerDocument308 pagesRobot New KhmerCheng Por Eng100% (9)
- Rus Profilleri GOST 26020-83Document8 pagesRus Profilleri GOST 26020-83Yigit TandoganNo ratings yet
- Exemple: Calcul D'un Montant de Mur en Profilé en C À Bords Tombés Formé À Froid Et Sollicité en TractionDocument4 pagesExemple: Calcul D'un Montant de Mur en Profilé en C À Bords Tombés Formé À Froid Et Sollicité en TractionInes abdeliNo ratings yet
- Guide Des Actions Climatiques Et SismiquesDocument12 pagesGuide Des Actions Climatiques Et SismiquesothmanNo ratings yet
- Dtu 43-3-2 Clauses AdministrativesDocument16 pagesDtu 43-3-2 Clauses AdministrativesAEMNo ratings yet
- ConceptionStructuresAcier-E15 RTremblayDocument75 pagesConceptionStructuresAcier-E15 RTremblaymlamourNo ratings yet
- BAEL91Document213 pagesBAEL91Hansley GayaNo ratings yet
- FEM Modelling of Stone ColumnDocument8 pagesFEM Modelling of Stone Columnbansalconstruction.cphiconsultNo ratings yet
- Détermination de La Température Des Structures Métalliques en Situation D'incendie Selon L'eurocode 3-2001Document13 pagesDétermination de La Température Des Structures Métalliques en Situation D'incendie Selon L'eurocode 3-2001sautier_thomasNo ratings yet
- NF en 1995-1-1 NaDocument11 pagesNF en 1995-1-1 Nahoria zakNo ratings yet
- Army Corps of Engineers Coastal Engineering Manual Cem Engineer Manual 1110-2-1100Document2 pagesArmy Corps of Engineers Coastal Engineering Manual Cem Engineer Manual 1110-2-1100Mohamed SemlaliNo ratings yet
- Evaluation of Coefficients of Subgrade ReactionDocument30 pagesEvaluation of Coefficients of Subgrade ReactionCescyle CostaNo ratings yet
- Doka 999801703 - 2010 - 10Document16 pagesDoka 999801703 - 2010 - 10Michael Van Minh NguyenNo ratings yet
- Abdelali KhoukhaDocument253 pagesAbdelali Khoukhamoamad metelus100% (1)
- Evaluation of Eurocode 7: Geotechnical DesignDocument54 pagesEvaluation of Eurocode 7: Geotechnical DesignBogdan BocseNo ratings yet
- Modelisation de Systeme D Isolation Parasismique PDFDocument169 pagesModelisation de Systeme D Isolation Parasismique PDFfoufou2003No ratings yet
- PermeabilityDocument35 pagesPermeabilityanalysethatNo ratings yet
- Casagrande1949 PDFDocument19 pagesCasagrande1949 PDFMarlon Osorio TarazonaNo ratings yet
- Mecanique Du SolDocument25 pagesMecanique Du Solmtssofiene100% (1)
- Prediction de La Courbe de Retention Deau Du Sol A Laide Des Fonctions de Pedotransfert (PTFS)Document14 pagesPrediction de La Courbe de Retention Deau Du Sol A Laide Des Fonctions de Pedotransfert (PTFS)mbengue.oumar.jrNo ratings yet
- Sem in For PerrierDocument20 pagesSem in For PerrierAchouaq MimouniNo ratings yet
- Caractérisation Hydrodynamique Des SolsDocument4 pagesCaractérisation Hydrodynamique Des Solssamir samirNo ratings yet
- Predicting The Coefficient of Permeability of SoilDocument36 pagesPredicting The Coefficient of Permeability of SoilAlvaro Pazmiño RomanNo ratings yet
- 2005 Anumerical Model of Sediment-Laden Turbulent Flow in An Open ChannelDocument8 pages2005 Anumerical Model of Sediment-Laden Turbulent Flow in An Open ChannelrenNo ratings yet
- Variations de Volume Des Sols Argileux Lors de Cycles de Drainage-HumidificationDocument9 pagesVariations de Volume Des Sols Argileux Lors de Cycles de Drainage-HumidificationAMOUZOUN ChristopheNo ratings yet
- Teneur en EauDocument4 pagesTeneur en EauAmineHadjout100% (1)
- Chapitre 3Document36 pagesChapitre 3RAP TUNISIANo ratings yet
- Différentes Formes de Présence de LDocument3 pagesDifférentes Formes de Présence de Ladam20141999No ratings yet
- ChapI MDS2-L3Document24 pagesChapI MDS2-L3nessarkNo ratings yet
- MPE2 DarcyDocument4 pagesMPE2 DarcyFatima-zahra NakroNo ratings yet
- Residual Soils and The Teaching of Soil MechanicsDocument4 pagesResidual Soils and The Teaching of Soil Mechanicssantiag987No ratings yet
- Le coefficient de compacit de Gravelius analyse critique d un indice de forme des bassins versantsDocument11 pagesLe coefficient de compacit de Gravelius analyse critique d un indice de forme des bassins versantsyoussef EL KHAYATINo ratings yet
- Fall-Cone Penetration and Water Content Relationship of ClaysDocument7 pagesFall-Cone Penetration and Water Content Relationship of ClaysNabucodonosor1980No ratings yet
- These Cifre Vinci-3SR 2012Document3 pagesThese Cifre Vinci-3SR 2012Gigarostom AlgerNo ratings yet
- Partie 1 Cours MDS Avancée PDFDocument7 pagesPartie 1 Cours MDS Avancée PDFAnouar SkysoulNo ratings yet
- Static Liquefaction of Sand in Plane StrainDocument16 pagesStatic Liquefaction of Sand in Plane StrainEdgar OrtegaNo ratings yet
- Relation Cohesion - Courbe de Retrait Dans Les MatDocument6 pagesRelation Cohesion - Courbe de Retrait Dans Les Matilyas bananiNo ratings yet
- Use of The GCTS Apparatus For The Measurement of Soil-Water Characteristic CurvesDocument6 pagesUse of The GCTS Apparatus For The Measurement of Soil-Water Characteristic CurvesLeng KengNo ratings yet
- Suite - Chapitre 4Document4 pagesSuite - Chapitre 4Mouhammad DiomandeNo ratings yet
- Leau Dans Le SolDocument10 pagesLeau Dans Le SolBelal FaridNo ratings yet
- Structure Double Diffusive Des Équations de La Convection en Air Humide Saturé Avec Application À L'air NuageuxDocument6 pagesStructure Double Diffusive Des Équations de La Convection en Air Humide Saturé Avec Application À L'air Nuageuxnadir adelNo ratings yet
- MuntzDocument11 pagesMuntzthieNo ratings yet
- Chapitre 3 Mds 3 Eme GRDocument7 pagesChapitre 3 Mds 3 Eme GRKarim AbdelkrimNo ratings yet
- DessCrack-Alert 2009Document20 pagesDessCrack-Alert 2009Ryan RahdianaNo ratings yet
- Solution TD II - 1EE-1112Document27 pagesSolution TD II - 1EE-1112rabahNo ratings yet
- Progres2019 5Document44 pagesProgres2019 5SALMA CHLAIKHYNo ratings yet
- 1 RegressionDocument11 pages1 Regressioncheikh3176No ratings yet
- Tout Savoir Sur La Régression PénaliséDocument19 pagesTout Savoir Sur La Régression PénaliséMor fall sylaNo ratings yet
- EDM 2 SuiteDocument6 pagesEDM 2 SuiteIkrame HamidallahNo ratings yet
- Master 2 TD1Document9 pagesMaster 2 TD1Bassirou ToéNo ratings yet
- Logistique Des Classeurs de LivresDocument7 pagesLogistique Des Classeurs de LivresScribdTranslationsNo ratings yet
- Cours IIIDocument9 pagesCours IIIsmatiNo ratings yet
- Master 2 Cours 6Document131 pagesMaster 2 Cours 6Agossou Alex AgbahideNo ratings yet
- Chapitre 1: La Régression Simple:: X) (Yi Y) XDocument7 pagesChapitre 1: La Régression Simple:: X) (Yi Y) Xtfrmqbbywidoevp0vgkNo ratings yet
- TP 04Document6 pagesTP 04mostafa oubihiNo ratings yet
- La Statistique Bidimensionnelle: 1) La Série Double À Doubles IndicesDocument20 pagesLa Statistique Bidimensionnelle: 1) La Série Double À Doubles IndicesTraore ZeinabNo ratings yet
- TD1 Régression Simple ENCGDocument3 pagesTD1 Régression Simple ENCGnohailahamdani2004No ratings yet
- Semi LogDocument1 pageSemi LogvalerianqueroixroucoulesNo ratings yet
- CM RegressionDocument18 pagesCM RegressionMed HosseinNo ratings yet
- Ajustement de CourbeDocument10 pagesAjustement de CourbeLebosseNo ratings yet
- Multiple REGRESSION WITH EXELDocument1 pageMultiple REGRESSION WITH EXELWa LidNo ratings yet
- M1 TPreg4Document2 pagesM1 TPreg4AYOUB MAKINo ratings yet
- 4am 19) StatDocument7 pages4am 19) StatAli Ben MessaoudNo ratings yet
- Chapitre 3Document24 pagesChapitre 3REGAYEG abdi100% (1)
- CR19.INAT22.STATISTIQUE Partie 2Document86 pagesCR19.INAT22.STATISTIQUE Partie 2fourat.zarkounaNo ratings yet
- 2 RegressionDocument20 pages2 RegressionSerigne NdourNo ratings yet
- Statistique Chapitre2 2Document14 pagesStatistique Chapitre2 2hajarjb47No ratings yet
- Lesson 08 StatsDocument17 pagesLesson 08 StatsamourbienvayantntsimbaNo ratings yet
- Cours Introduction À L'econométrieDocument95 pagesCours Introduction À L'econométriegondodiesamesperanceNo ratings yet
- Projet StatistiqueDocument17 pagesProjet Statistiquesalma rakiniNo ratings yet
- Cours m1 Econometrie Appliquee Slide3Document23 pagesCours m1 Econometrie Appliquee Slide3Wajdi Frikha100% (1)
- Séance 03Document18 pagesSéance 03ayoubhaouasNo ratings yet