You might also like
- Spi and I2cDocument11 pagesSpi and I2cAbhay Tomar100% (1)
- I2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumDocument18 pagesI2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumShuvra Saha100% (1)
- Spi ModuleDocument13 pagesSpi ModuleMuhammadSaeedTahir100% (2)
- Basics of SPI Communication ProtocolDocument19 pagesBasics of SPI Communication ProtocolNEETHU PRAKASH100% (1)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocument7 pagesOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- ADC Through SPIDocument4 pagesADC Through SPIChiquita White100% (1)
- Using The TWI Module As I2C MasterDocument11 pagesUsing The TWI Module As I2C Mastermithrandair100% (1)
- SPI Master Core Specification: Author: Simon SrotDocument14 pagesSPI Master Core Specification: Author: Simon SrotManoj Kumar100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocument5 pagesInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- Design and Functional Verification of I2C Master Core Using OVMDocument6 pagesDesign and Functional Verification of I2C Master Core Using OVMPraveen Kumar100% (1)
- History of The I2C BusDocument24 pagesHistory of The I2C BusManoj Kavedia100% (1)
- Pic Assem 2004Document34 pagesPic Assem 2004LuisHdz100% (2)
- CCP PWMDocument19 pagesCCP PWMalaa_saq100% (1)
- I2C-Master Core SpecificationDocument17 pagesI2C-Master Core Specificationvarunmr100% (1)
- Elc 2014 Usb 0 PDFDocument96 pagesElc 2014 Usb 0 PDFAhmed Hamouda100% (1)
- A Note On Character LCD DisplaysDocument11 pagesA Note On Character LCD DisplaysLishan Jayanath100% (2)
- Agribot Project PresentationDocument21 pagesAgribot Project Presentationumaiya1990100% (1)
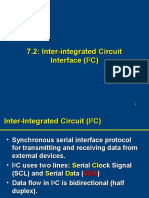
- Section 7.2 - I2CNewMarch27Document32 pagesSection 7.2 - I2CNewMarch27Andy Wo100% (1)
- RS-232, RS-422, RS-485 Serial Communication General ConceptsDocument7 pagesRS-232, RS-422, RS-485 Serial Communication General ConceptsVidhya Dharan100% (1)
- Understanding I2C BusDocument8 pagesUnderstanding I2C BusMai Khoa100% (1)
- Design Ideas: Keyboard CircuitDocument2 pagesDesign Ideas: Keyboard CircuitTariq Zuhluf100% (3)
- AN1310 - BooltloaderDocument24 pagesAN1310 - BooltloaderRaulsoft100% (1)
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDocument8 pagesHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology Incadil100% (1)
- I2c CommunicationDocument9 pagesI2c CommunicationSanjay Sharma100% (2)
- Aoc 2436saDocument45 pagesAoc 2436saatomo33100% (1)
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Interfacing an HD44780 LCD to a C8051F120 MicrocontrollerDocument23 pagesInterfacing an HD44780 LCD to a C8051F120 Microcontrollerahimpli100% (2)
- CD4063 CD4040 CD4001 CD4069 CD40110 circuit : 8-BIT BINARY-TO-DECIMAL CONVERTERDocument1 pageCD4063 CD4040 CD4001 CD4069 CD40110 circuit : 8-BIT BINARY-TO-DECIMAL CONVERTERDrNikhil Agrawal100% (1)
- Open Core SpiDocument13 pagesOpen Core SpiBhanu Pratap Singh100% (1)
- GDM2004D LCD SpecsheetDocument9 pagesGDM2004D LCD SpecsheetNico Bellic100% (2)
- Datasheet lcd03 20x4 B PDFDocument8 pagesDatasheet lcd03 20x4 B PDFFrancis100% (1)
- 001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Document57 pages001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Arturo Picolin100% (1)
- PIC (PWM PGM Steps)Document20 pagesPIC (PWM PGM Steps)Elena Gilbert100% (2)
- Make The Smartpic Serial Programmer: Feature ArticleDocument5 pagesMake The Smartpic Serial Programmer: Feature Articlersanchez-100% (1)
- Embeddded Pic 18f Starter KitDocument3 pagesEmbeddded Pic 18f Starter KitEmblitz Rajajinagar100% (1)
- An-960 RS 485 Incl Termination DetailsDocument12 pagesAn-960 RS 485 Incl Termination Detailsqafqgibsonq4543100% (1)
- Modbus Protocol UGDocument33 pagesModbus Protocol UGMuhammad Sa'ad100% (1)
- 4.6.2 Universal Serial Bus (USB)Document18 pages4.6.2 Universal Serial Bus (USB)kollavivek_534195858100% (2)
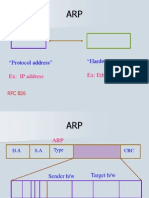
- Details of ARP and PPPDocument40 pagesDetails of ARP and PPPYogesh Palkar100% (1)
- PIC Introduction PDFDocument46 pagesPIC Introduction PDFPeeyush Kp100% (1)
- 8086 PPTDocument30 pages8086 PPTKavitha Subramaniam100% (1)
- PIC Tutorial 3Document10 pagesPIC Tutorial 3api-3801984100% (3)
- Maxuino - Starter GuideDocument5 pagesMaxuino - Starter GuideArvind Singh100% (1)
- Inline Asm86Document105 pagesInline Asm86siddharthpwatwe100% (3)
- Nex-Robotics 20x4 Serial LCD ModuleDocument9 pagesNex-Robotics 20x4 Serial LCD ModuleAshok Kumar100% (1)
- Bascom and AVR, RS-232Document10 pagesBascom and AVR, RS-232akbar100% (1)
- Integrated Circuit Bus Protocol GuideDocument53 pagesIntegrated Circuit Bus Protocol GuideFarman Rizvi100% (2)
- Testing Pic Code For I2C Master - Slave CommunicationDocument15 pagesTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- PT2313L PDFDocument3 pagesPT2313L PDFMaugrys Castillo100% (1)
- Pic TCP Ip StackDocument94 pagesPic TCP Ip StackHania Umar100% (1)
- Using PICKit™ 3 For MPLAB® X IDEDocument1 pageUsing PICKit™ 3 For MPLAB® X IDEpopoyboy100% (1)
- Guia Basica de Ejercicios-ProtonDocument59 pagesGuia Basica de Ejercicios-ProtonFatality Joseph100% (1)
- EE6008 Unit 3Document8 pagesEE6008 Unit 3TakeItEasyDude TIEDNo ratings yet
- CENG507 Fall2020 Chap5Document42 pagesCENG507 Fall2020 Chap5Anonymous phisherNo ratings yet
- SpiDocument21 pagesSpirockymaxdeemannNo ratings yet
- Inter Integrated Circuit Implementation and ApplicationDocument34 pagesInter Integrated Circuit Implementation and ApplicationAshokSiri100% (1)
- Serial Interfaces PDFDocument55 pagesSerial Interfaces PDFGaurav GrimReaper Roy100% (1)
- Using The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDocument14 pagesUsing The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDario Darius100% (2)
- SDA - Serial Data, SCL - Serial ClockDocument10 pagesSDA - Serial Data, SCL - Serial ClockPavan Kulkarni100% (3)
- Survey About I2C and SPI CommunicationDocument16 pagesSurvey About I2C and SPI Communicationtruongan15092002No ratings yet
- Review of Fourier Transform.Document3 pagesReview of Fourier Transform.Haris JeelaniNo ratings yet
- The Doctrine of The Mean and The Great LearningDocument104 pagesThe Doctrine of The Mean and The Great LearningHaris JeelaniNo ratings yet
- Linear AlgebraDocument496 pagesLinear AlgebralarybagsNo ratings yet
- UHF & Microwave - 102409022149 - 1Document8 pagesUHF & Microwave - 102409022149 - 1Naveen Kumar WNo ratings yet
- Military Flight Aptitude TestsDocument272 pagesMilitary Flight Aptitude TestsHaris Jeelani100% (5)
- 1500 Test CDocument428 pages1500 Test CngotuannghiaNo ratings yet
- Review of Related Literature of Jackfruit SeedDocument4 pagesReview of Related Literature of Jackfruit SeedPrince Martin John Villamor80% (5)
- K.P.Mondal & Sons: Quality Assurance PlanDocument1 pageK.P.Mondal & Sons: Quality Assurance PlanTanmoy DuttaNo ratings yet
- Ashrae Handbook 2000 CHDocument32 pagesAshrae Handbook 2000 CHKazuto NakazatoNo ratings yet
- M7 Lab: Sedimentary RocksDocument10 pagesM7 Lab: Sedimentary RocksEssay NationNo ratings yet
- Care of Older Adults Notes PT 1Document5 pagesCare of Older Adults Notes PT 1Edson John Demayo100% (1)
- Peds Ati - VS + Lab ValuesDocument1 pagePeds Ati - VS + Lab Valuesluke jackson100% (1)
- Automated Home Rainwater Harvesting Earns MoneyDocument4 pagesAutomated Home Rainwater Harvesting Earns MoneysaravananNo ratings yet
- Vakri Grahas - Effects of Retrograde Planets in Hindu AstrologyDocument4 pagesVakri Grahas - Effects of Retrograde Planets in Hindu AstrologyBailvan100% (1)
- Tuto Traktor Arduino enDocument11 pagesTuto Traktor Arduino enlexetaNo ratings yet
- AUSC National Conference 2019-Oct19-3rd AnnouncementDocument4 pagesAUSC National Conference 2019-Oct19-3rd AnnouncementarivarasuNo ratings yet
- BackIntelligence Herniated Disc ExercisesDocument9 pagesBackIntelligence Herniated Disc Exercisesswaminathan1No ratings yet
- The Supply Chain For Electric Vehicle BatteriesDocument21 pagesThe Supply Chain For Electric Vehicle BatteriesProbonogoya Erawan Sastroredjo100% (2)
- Aqua Regia - WikipediaDocument5 pagesAqua Regia - WikipediaearthplightNo ratings yet
- Hypothalamus and Pituitary Gland: Master Regulators of HormonesDocument5 pagesHypothalamus and Pituitary Gland: Master Regulators of HormonesLiv LeysonNo ratings yet
- Coordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyDocument8 pagesCoordinated Voltage and Reactive Power Control Strategy With Distributed Generator For Improving The Operational EfficiencyRaphael NgenyiNo ratings yet
- Nissan Skyline RB Engine Oil Control ModsDocument1 pageNissan Skyline RB Engine Oil Control Modsbyrnesvictim100% (1)
- Volvo A30e2 PDFDocument28 pagesVolvo A30e2 PDFsafdey100% (1)
- Silo Surface Area CalculationDocument3 pagesSilo Surface Area CalculationVIC EngineersNo ratings yet
- (2014) Colour and Technology in Historic Decorated Glazes and Glasses PDFDocument117 pages(2014) Colour and Technology in Historic Decorated Glazes and Glasses PDFtariq.toffa4760No ratings yet
- Fitness RX For Women - April 2014Document116 pagesFitness RX For Women - April 2014Ricardo Soares100% (2)
- Gross Examination LabmedDocument2 pagesGross Examination Labmediishayati100% (1)
- MCA-12 Web DesigningDocument204 pagesMCA-12 Web DesigningLittaNo ratings yet
- Comprehensive Land Use Plan in Municipality of TigbauanDocument4 pagesComprehensive Land Use Plan in Municipality of TigbauanmaygracedigolNo ratings yet
- Sample Question Paper Class Ix Summative Assessment Ii English Code No. 101 (Communicative)Document15 pagesSample Question Paper Class Ix Summative Assessment Ii English Code No. 101 (Communicative)api-243565143No ratings yet
- LADBS - Swimming PoolsDocument43 pagesLADBS - Swimming PoolsMichael James100% (1)
- The Wankel Engine Design Development AppDocument271 pagesThe Wankel Engine Design Development AppFurqanNo ratings yet
- ISD1700Document24 pagesISD1700Kevin De La CruzNo ratings yet
- Operation and Analysis of The Three Phase Fully Controlled Bridge ConverterDocument24 pagesOperation and Analysis of The Three Phase Fully Controlled Bridge Convertermohammed aliNo ratings yet
- Measurement of Carbon Dioxide Content: Centec Process SensorsDocument2 pagesMeasurement of Carbon Dioxide Content: Centec Process Sensorslaoying qdNo ratings yet
- Anemia Defisiensi Besi Pada Pasien Dengan Ulkus Peptikum: Laporan KasusDocument4 pagesAnemia Defisiensi Besi Pada Pasien Dengan Ulkus Peptikum: Laporan KasusAzura SyahadatiNo ratings yet