You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Time AnalysisDocument1 pageTime AnalysisRitesh SinghNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 2011 - Adaptive Optimal Control For An Air-Breathing Hypersonic VehicleDocument6 pages2011 - Adaptive Optimal Control For An Air-Breathing Hypersonic VehicleRitesh SinghNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Week1a ControlDocument73 pagesWeek1a Controlarunkumar SNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Time DomainDocument2 pagesTime DomainRitesh SinghNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Tional Problem Optimal: Within The Model For of Pressure in ToDocument6 pagesTional Problem Optimal: Within The Model For of Pressure in ToRitesh SinghNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Control Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Document40 pagesControl Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Ritesh SinghNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Linear Control System: Unit 1: Introductory Concepts Prepared by Alka GuptaDocument13 pagesLinear Control System: Unit 1: Introductory Concepts Prepared by Alka GuptaRitesh SinghNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Home Assignment BETDocument12 pagesHome Assignment BETRitesh SinghNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Comment On - Active Flutter Control Using Generalized Unsteady Aerodynamic TheoryDocument2 pagesComment On - Active Flutter Control Using Generalized Unsteady Aerodynamic TheoryRitesh SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Airplane Performance Sensitivities To Lateral and Vertical ProfilesDocument1 pageAirplane Performance Sensitivities To Lateral and Vertical ProfilesRitesh SinghNo ratings yet
- Book AnnouncementsDocument1 pageBook AnnouncementsRitesh SinghNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Its Application: OgufuDocument2 pagesIts Application: OgufuRitesh SinghNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Config Aero SizeDocument9 pagesConfig Aero SizeRitesh SinghNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Effect of Thrust Speed Dependence On Long-Period Dynamics in Supersonic FlightDocument4 pagesEffect of Thrust Speed Dependence On Long-Period Dynamics in Supersonic FlightRitesh SinghNo ratings yet
- 17090190Document13 pages17090190Ritesh SinghNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 17058089Document9 pages17058089Ritesh SinghNo ratings yet
- Robust Stability of Diamond of Complex Multivariate PolynomialsDocument2 pagesRobust Stability of Diamond of Complex Multivariate PolynomialsRitesh SinghNo ratings yet
- Control Systems ApplicationDocument6 pagesControl Systems ApplicationRitesh SinghNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Dynamic Programming MatlabDocument6 pagesDynamic Programming MatlabRitesh SinghNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Dynamics and Control For An In-Plane Morphing Wing: Shi Rongqi and Song JianmeiDocument8 pagesDynamics and Control For An In-Plane Morphing Wing: Shi Rongqi and Song JianmeiRitesh SinghNo ratings yet
- Dynamic Inversion With Zero-Dynamics Stablization For Quadrotor ControlDocument13 pagesDynamic Inversion With Zero-Dynamics Stablization For Quadrotor ControlRitesh SinghNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Attitude Cooperative Control of Spacecraft Formation Via Output-FeedbackDocument9 pagesAttitude Cooperative Control of Spacecraft Formation Via Output-FeedbackRitesh SinghNo ratings yet
- Gravity Gradient Torque of Spacecraft Orbiting Asteroids: Yue Wang and Shijie XuDocument10 pagesGravity Gradient Torque of Spacecraft Orbiting Asteroids: Yue Wang and Shijie XuRitesh SinghNo ratings yet
- Rapid Integration, Development and Flight Test of Helicopter Flight Control LawsDocument20 pagesRapid Integration, Development and Flight Test of Helicopter Flight Control LawsRitesh SinghNo ratings yet
- Loop Shapind Design ProcedureDocument4 pagesLoop Shapind Design ProcedureRitesh SinghNo ratings yet
- Asymptotic Generalised Dynamic InversionDocument15 pagesAsymptotic Generalised Dynamic InversionRitesh SinghNo ratings yet
- AerospaceDocument12 pagesAerospaceRitesh SinghNo ratings yet
- Fractional Order Phase Shaper Design With Routh'sDocument4 pagesFractional Order Phase Shaper Design With Routh'sRitesh SinghNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Fixed-Structure H Controller Synthesis Based OnDocument6 pagesFixed-Structure H Controller Synthesis Based OnRitesh SinghNo ratings yet
- 01-Toy Product DesignDocument54 pages01-Toy Product DesignJuanNo ratings yet
- Introduction To Graph-Theoryv2Document92 pagesIntroduction To Graph-Theoryv2sheela lNo ratings yet
- NC1 AC Contactor, 9 95A: Contactors ContactorsDocument2 pagesNC1 AC Contactor, 9 95A: Contactors ContactorsYamendra GurungNo ratings yet
- Product Leaflet Seawater ElectrochlorinationDocument4 pagesProduct Leaflet Seawater Electrochlorinationgkdora574No ratings yet
- Probability spaces and σ-algebras: Scott SheffieldDocument12 pagesProbability spaces and σ-algebras: Scott SheffieldRikta DasNo ratings yet
- 1xEV RF Optimization Guidelines R24Document83 pages1xEV RF Optimization Guidelines R24lady_sNo ratings yet
- Option MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)Document4 pagesOption MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)MukulNo ratings yet
- PTS Controller: Over Fuel Dispensers and ATG Systems For Petrol StationsDocument161 pagesPTS Controller: Over Fuel Dispensers and ATG Systems For Petrol StationsdawitNo ratings yet
- Elasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationDocument7 pagesElasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationAnanya MishraNo ratings yet
- Recommendation Letter MhandoDocument2 pagesRecommendation Letter MhandoAnonymous Xb3zHio0% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tavistock PrimerDocument13 pagesTavistock PrimerSharon Schaff100% (1)
- Student Camps 2022 - Grade 6 Science Curriculum Based Test BookletDocument58 pagesStudent Camps 2022 - Grade 6 Science Curriculum Based Test Bookletthank you GodNo ratings yet
- Khairro SanfordDocument2 pagesKhairro SanfordJezreel SabadoNo ratings yet
- Liter Ature - 4A: Start ThinkingDocument2 pagesLiter Ature - 4A: Start ThinkingNour AlkaloutiNo ratings yet
- 027 03 Dec13 CseDocument647 pages027 03 Dec13 CseParth NagarNo ratings yet
- Stulz C7000R 01 PDFDocument198 pagesStulz C7000R 01 PDFNarciso Torres0% (1)
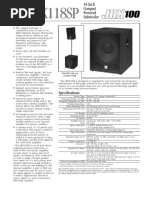
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisNo ratings yet
- Surge CounterDocument2 pagesSurge CounterJavier CuzcoNo ratings yet
- Rack Interface Module 3500 20SDocument71 pagesRack Interface Module 3500 20SmaheshNo ratings yet
- (English) Time and The Brain - The Illusion of Now - Hinze Hogendoorn - TEDxUtrechtUniversity (DownSub - Com)Document14 pages(English) Time and The Brain - The Illusion of Now - Hinze Hogendoorn - TEDxUtrechtUniversity (DownSub - Com)Диана ТатарчукNo ratings yet
- Staffing ProcessDocument18 pagesStaffing ProcessEbtesam EliasNo ratings yet
- Pipeline Construction InspecDocument48 pagesPipeline Construction InspecAliDadKhan100% (2)
- Eurotuner February 2010 PDFDocument1 pageEurotuner February 2010 PDFJenniferNo ratings yet
- CELCHA2 Practical Manual 2022Document51 pagesCELCHA2 Practical Manual 2022Gee DevilleNo ratings yet
- NewspaperDocument1 pageNewspaperMustafa Nabeel ZamanNo ratings yet
- Mcs Text BookDocument309 pagesMcs Text Bookkancha_basu2447100% (1)
- CNSB Bypass Separator Commissioning and Maintenance Guide: Conder® Tanks Covered by This GuideDocument4 pagesCNSB Bypass Separator Commissioning and Maintenance Guide: Conder® Tanks Covered by This GuidesterlingNo ratings yet
- Amiel Houser - LévinasDocument8 pagesAmiel Houser - Lévinaschristyh3No ratings yet
- Wilson's TheoremDocument7 pagesWilson's TheoremJonik KalalNo ratings yet
- UT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)Document7 pagesUT Dallas Syllabus For Math3303.501.10f Taught by Phillip Kisunzu (pxk091000)UT Dallas Provost's Technology GroupNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- A Welder’s Handbook to Robotic ProgrammingFrom EverandA Welder’s Handbook to Robotic ProgrammingRating: 5 out of 5 stars5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)