You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- EE40 Robot Layout: 9V BatteryDocument1 pageEE40 Robot Layout: 9V BatteryJack LongNo ratings yet
- Prelab 8Document6 pagesPrelab 8Jack LongNo ratings yet
- PreLab 6Document4 pagesPreLab 6Jack LongNo ratings yet
- Prelab 5Document12 pagesPrelab 5Jack LongNo ratings yet
- EE40, Spring 2015, Pre-Lab 3 LED Circuit and Voltage Regulator CircuitDocument4 pagesEE40, Spring 2015, Pre-Lab 3 LED Circuit and Voltage Regulator CircuitJack LongNo ratings yet
- Prelab 4Document7 pagesPrelab 4Jack LongNo ratings yet
- Ps 2Document1 pagePs 2Jack LongNo ratings yet
- Web QuestDocument3 pagesWeb QuestJack LongNo ratings yet
- Ps 1Document1 pagePs 1Jack LongNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Z600EDocument2 pagesZ600Esaleemut3No ratings yet
- Cat ATySr-ATySd GBDocument2 pagesCat ATySr-ATySd GBVladimirGuerreroNo ratings yet
- Presen Rewr W WDocument34 pagesPresen Rewr W Waceel fitchNo ratings yet
- Technical Specifications Saitel DR-EN-Rev3.3Document35 pagesTechnical Specifications Saitel DR-EN-Rev3.3Miguel Huaccha ArmasNo ratings yet
- Ae-6b Service Manual 488Document52 pagesAe-6b Service Manual 488fontanieroNo ratings yet
- Operation Manual LST900 900DDocument12 pagesOperation Manual LST900 900DLizMarquezNo ratings yet
- Robertson Transformer Co. DBA Robertson Worldwide v. General Electric Company Et. Al.Document33 pagesRobertson Transformer Co. DBA Robertson Worldwide v. General Electric Company Et. Al.Patent LitigationNo ratings yet
- 14 Switching Devices Catalog Vol1 Tab2 Ca08100003eDocument126 pages14 Switching Devices Catalog Vol1 Tab2 Ca08100003eMusab yassinNo ratings yet
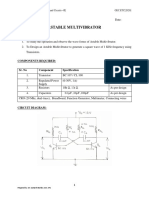
- Expt 9 - Astable-Multivibrator (2020)Document5 pagesExpt 9 - Astable-Multivibrator (2020)samarth100% (1)
- MAST2776B Process Instrumentation TS Lesson 3 Rev.00Document103 pagesMAST2776B Process Instrumentation TS Lesson 3 Rev.00Hassan Al-HasanNo ratings yet
- Samsung LCD A55x Service ManualDocument242 pagesSamsung LCD A55x Service ManualJunks4Fun50% (6)
- Info Iec62055-31 (Ed1.0) enDocument8 pagesInfo Iec62055-31 (Ed1.0) enDaysi Ivonne Ortega MonteroNo ratings yet
- Ptx30 Uht /S3: User ManualDocument122 pagesPtx30 Uht /S3: User ManualQuive CarlosNo ratings yet
- File 3278 BGDocument12 pagesFile 3278 BGAnthonyNo ratings yet
- Materials System SpecificationDocument18 pagesMaterials System SpecificationEagle SpiritNo ratings yet
- Solar Mobile ChargingDocument21 pagesSolar Mobile ChargingZakir Hussain45% (11)
- Unit V Circuit Breakers 9Document25 pagesUnit V Circuit Breakers 9Prathap VuyyuruNo ratings yet
- As4777 - En60950 - SMC60 70 80TL Zen093010Document2 pagesAs4777 - En60950 - SMC60 70 80TL Zen093010nisteriNo ratings yet
- T1M5F600ADocument6 pagesT1M5F600AIvánNo ratings yet
- Organic Molecules in ElectronicsDocument32 pagesOrganic Molecules in ElectronicsRachelle McKeownNo ratings yet
- Antunes VCT-2000HCDocument28 pagesAntunes VCT-2000HCMauricio GómezNo ratings yet
- Power Factor Meters - Electrodynamometer Type Power Factor MeterDocument4 pagesPower Factor Meters - Electrodynamometer Type Power Factor MeterNh Chuminda YapaNo ratings yet
- Dynasty 200 DXUser ManualDocument98 pagesDynasty 200 DXUser ManualBill100% (1)
- DC Motor Control Using Arduino: 1) IntroductionDocument10 pagesDC Motor Control Using Arduino: 1) IntroductionSoeAyeNo ratings yet
- University of Trinidad and Tobago (UTT) Department of Utilities EngineeringDocument14 pagesUniversity of Trinidad and Tobago (UTT) Department of Utilities Engineeringfaraherh amberNo ratings yet
- Sensor de Marca Lx-100Document16 pagesSensor de Marca Lx-100ElinplastNo ratings yet
- MFL71807902 02 Q 221123+MFL71807802 02 220930Document52 pagesMFL71807902 02 Q 221123+MFL71807802 02 220930zodcarNo ratings yet
- CIGRE 2016: 21, Rue D'artois, F-75008 PARISDocument10 pagesCIGRE 2016: 21, Rue D'artois, F-75008 PARISGooge ReviewerNo ratings yet
- Trantec Toa Mic A4 - WirelessDocument28 pagesTrantec Toa Mic A4 - WirelessBudi UtomoNo ratings yet
- AKG C422, C34, C33 Stereophonic Condenser MicrophonesDocument4 pagesAKG C422, C34, C33 Stereophonic Condenser MicrophonesMario CrispiNo ratings yet