You might also like
- Reduce Power Losses and Improve Power FactorDocument14 pagesReduce Power Losses and Improve Power FactorAdeel ZafarNo ratings yet
- Conservation of MomentumDocument17 pagesConservation of MomentumWilma Y. VillasanNo ratings yet
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Document5 pagesWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiNo ratings yet
- Cambridge International As and A Level Physics Revision GuideDocument40 pagesCambridge International As and A Level Physics Revision GuideR Mathew50% (8)
- Vibration Under General Forcing ConditionsDocument48 pagesVibration Under General Forcing ConditionsEpimerianos AberianosNo ratings yet
- Trigonometry SlidesDocument115 pagesTrigonometry Slideschristian pagtamaNo ratings yet
- Technical Paper-French Standard NFC 17-102 (2011)Document10 pagesTechnical Paper-French Standard NFC 17-102 (2011)Mohamad HishamNo ratings yet
- Feedback Linearization Continued: Consider The Control Affine SISO SystemDocument23 pagesFeedback Linearization Continued: Consider The Control Affine SISO SystemJason ChiangNo ratings yet
- Inverse Laplace Transform Lecture-3Document22 pagesInverse Laplace Transform Lecture-3SingappuliNo ratings yet
- 01 IntroDocument28 pages01 Introsouvik5000No ratings yet
- Laplace Transforms for ODE SolutionsDocument20 pagesLaplace Transforms for ODE SolutionsJamel CayabyabNo ratings yet
- Flatness and Motion Planning: The Car With: N TrailersDocument6 pagesFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNo ratings yet
- Chapter 1 IntroductionDocument32 pagesChapter 1 IntroductionYucheng XiangNo ratings yet
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 pagesClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanNo ratings yet
- Design of Reduced-Order Functional Observers For Linear Systems With Unknown InputsDocument7 pagesDesign of Reduced-Order Functional Observers For Linear Systems With Unknown InputsXzax TornadoxNo ratings yet
- CompendiumDocument117 pagesCompendiumPanos SiatosNo ratings yet
- BBM 3A978 1 349 14944 5 2F1Document30 pagesBBM 3A978 1 349 14944 5 2F1farooqNo ratings yet
- Frequency-Domain Analysis of Dynamic SystemsDocument27 pagesFrequency-Domain Analysis of Dynamic SystemsmoomeejeeNo ratings yet
- Adaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsDocument9 pagesAdaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsVictor PassosNo ratings yet
- Ec2 4Document40 pagesEc2 4masudul9islamNo ratings yet
- Nemecka3 TDS 01Document3 pagesNemecka3 TDS 01Karel NěmecNo ratings yet
- Numerical Methods For Ode Initial Value ProblemsDocument20 pagesNumerical Methods For Ode Initial Value Problems37 TANNUNo ratings yet
- Finite Element Study of Elastic Rods Under Thermal LoadingDocument57 pagesFinite Element Study of Elastic Rods Under Thermal LoadingJaspreet SinghNo ratings yet
- Constructing Solutions of Fractional Differential EquationsDocument16 pagesConstructing Solutions of Fractional Differential EquationsTania BenadalidNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- 10.1007@s11785 019 00924 ZDocument19 pages10.1007@s11785 019 00924 ZKarwan JwamerNo ratings yet
- Advanced Control Systems TechniquesDocument3 pagesAdvanced Control Systems TechniquesGianluca CastrinesiNo ratings yet
- CONTROL SYSTEMS ENGINEERING TUTORIALDocument5 pagesCONTROL SYSTEMS ENGINEERING TUTORIALcataiceNo ratings yet
- Modal Analysis Approximate MethodsDocument9 pagesModal Analysis Approximate MethodsRafaAlmeidaNo ratings yet
- Examples NLSDocument5 pagesExamples NLSKirti Deo MishraNo ratings yet
- Chapter 4 (From Seborg Et Al.)Document26 pagesChapter 4 (From Seborg Et Al.)Jamel CayabyabNo ratings yet
- Modeling of Dynamic SystemsmesinDocument19 pagesModeling of Dynamic SystemsmesinRifqi Bustanul FaozanNo ratings yet
- Closed-loop control system block diagramDocument41 pagesClosed-loop control system block diagramTing SamuelNo ratings yet
- 1 s2.0 S1474667015364715 MainjlbDocument6 pages1 s2.0 S1474667015364715 MainjlbVigneshRamakrishnanNo ratings yet
- An Algorithm To Compute The Transfer Function of A Mechanical SystemDocument6 pagesAn Algorithm To Compute The Transfer Function of A Mechanical SystemquestrwpNo ratings yet
- Discrete Time Control Systems Unit 5Document23 pagesDiscrete Time Control Systems Unit 5kishan guptaNo ratings yet
- Practice Questions For Quiz 1Document2 pagesPractice Questions For Quiz 1Steven BrowneNo ratings yet
- Problems and SolutionsDocument13 pagesProblems and SolutionsJason ChiangNo ratings yet
- TSSD 2009Document16 pagesTSSD 2009MongiBESBESNo ratings yet
- Programming Exercise 2: Quadrotor Control in The Plane: 2.1 Coordinate SystemsDocument5 pagesProgramming Exercise 2: Quadrotor Control in The Plane: 2.1 Coordinate SystemsCrubher ChinalcoNo ratings yet
- State Space Model Lecture Exploring Dynamic Systems RepresentationDocument31 pagesState Space Model Lecture Exploring Dynamic Systems RepresentationAlfares KingNo ratings yet
- Numerical Methods for Structural DynamicsDocument35 pagesNumerical Methods for Structural DynamicsEduard Cosmin UngureanuNo ratings yet
- Enae 641Document6 pagesEnae 641bob3173No ratings yet
- ENEE 660 HW Sol #7Document8 pagesENEE 660 HW Sol #7PeacefulLionNo ratings yet
- Linear Systems Chapter AnalysisDocument44 pagesLinear Systems Chapter AnalysisrajuvadlakondaNo ratings yet
- Class 3 Mathematical ModelingDocument24 pagesClass 3 Mathematical ModelingAcharya Mascara PlaudoNo ratings yet
- Solution To Assignment 02Document6 pagesSolution To Assignment 02Alexander JolleyNo ratings yet
- Digital Control Design FundamentalsDocument18 pagesDigital Control Design FundamentalsChinta WulandariNo ratings yet
- Assignment 2Document5 pagesAssignment 2rodrigocampospkNo ratings yet
- Sas SeriesDocument8 pagesSas SerieskganesharunNo ratings yet
- VAR Models: Gloria González-RiveraDocument32 pagesVAR Models: Gloria González-RiveraVinko ZaninovićNo ratings yet
- Me 360 Transfer FunctionsDocument3 pagesMe 360 Transfer FunctionsftoomauaeNo ratings yet
- LECTURE NOTES-MECE 303 Theory of Machines 5 - Analytical Position AnalysisDocument13 pagesLECTURE NOTES-MECE 303 Theory of Machines 5 - Analytical Position AnalysisMohammad ZohaibNo ratings yet
- SPC318: System Modeling and Linear SystemsDocument43 pagesSPC318: System Modeling and Linear SystemsAtanuMajiNo ratings yet
- The Legendre Equation and Its Self-AdjointDocument33 pagesThe Legendre Equation and Its Self-AdjointmohammadH7No ratings yet
- Discrete Time Random Processes: 4.1 (A) UsingDocument16 pagesDiscrete Time Random Processes: 4.1 (A) UsingSudipta GhoshNo ratings yet
- General Forced Response: P T N B P T N A A T FDocument11 pagesGeneral Forced Response: P T N B P T N A A T FSathish Kumar SNo ratings yet
- Taylor Series Method With Numerical Derivatives For Numerical Solution of ODE Initial Value ProblemsDocument14 pagesTaylor Series Method With Numerical Derivatives For Numerical Solution of ODE Initial Value ProblemsasfimalikNo ratings yet
- Active Disturbance Rejection and Control of Differentially Flat SystemsDocument28 pagesActive Disturbance Rejection and Control of Differentially Flat SystemsAhmed H El ShaerNo ratings yet
- DAEsDocument40 pagesDAEsfaizabbk1709No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- L5 HSMxpress LabDocument30 pagesL5 HSMxpress LabOscar De SilvaNo ratings yet
- 1A - Matlab Introductory ExerciseDocument2 pages1A - Matlab Introductory ExerciseOscar De SilvaNo ratings yet
- 1 - Charachteristics of SensorsDocument42 pages1 - Charachteristics of SensorsOscar De SilvaNo ratings yet
- Motion Analysis Sim MechanicsDocument11 pagesMotion Analysis Sim MechanicsOscar De SilvaNo ratings yet
- De Silva, Mann, Gosine - 2014 - Relative Localization With Symmetry Preserving ObserversDocument6 pagesDe Silva, Mann, Gosine - 2014 - Relative Localization With Symmetry Preserving ObserversOscar De SilvaNo ratings yet
- EMG ClassificationDocument5 pagesEMG ClassificationOscar De SilvaNo ratings yet
- Dynamic simulation of underwater vehicle manipulator systemsDocument6 pagesDynamic simulation of underwater vehicle manipulator systemsodsnetNo ratings yet
- ProjectreportemgDocument9 pagesProjectreportemgOscar De SilvaNo ratings yet
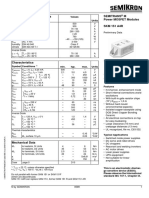
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocument5 pagesAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Revision Notes On Some Basic Concepts of ChemistryDocument6 pagesRevision Notes On Some Basic Concepts of ChemistryGagan JainNo ratings yet
- Magnetostriction MichelsonDocument6 pagesMagnetostriction MichelsonOktafiani Nurita SariNo ratings yet
- 'Ulyhfrq: Instruction ManualDocument36 pages'Ulyhfrq: Instruction ManualAndri kuswandiNo ratings yet
- Exercises CeDocument3 pagesExercises CeLethal Al'dvlNo ratings yet
- Ecm TutorialDocument10 pagesEcm Tutorialahp2011No ratings yet
- Aapt AIP 2019 United States Physics Team: 2019 F Ma Exam 25 Questions - 75 Minutes InstructionsDocument22 pagesAapt AIP 2019 United States Physics Team: 2019 F Ma Exam 25 Questions - 75 Minutes InstructionsNam NguyễnNo ratings yet
- INTERNDocument21 pagesINTERNSahil Shah100% (1)
- Munters Misting Humidifiers Electrolux Ovlaznuvaci - MX2700 - ENDocument2 pagesMunters Misting Humidifiers Electrolux Ovlaznuvaci - MX2700 - ENIfti NiaziNo ratings yet
- Network Laws & TheoremsDocument14 pagesNetwork Laws & Theoremstroy guillNo ratings yet
- Modular Lead Exit - Info SheetDocument2 pagesModular Lead Exit - Info SheetSunil GurubaxaniNo ratings yet
- Electrical Power Factor Calculation and Improvement MethodsDocument5 pagesElectrical Power Factor Calculation and Improvement MethodsZakariyaNo ratings yet
- Tesco Fan Report SEODocument1 pageTesco Fan Report SEODeva GaneshanNo ratings yet
- NG CalculationDocument9 pagesNG CalculationAhmedNo ratings yet
- Trainwreck Pacific Transformer DocumentsDocument22 pagesTrainwreck Pacific Transformer DocumentsrythmaccountNo ratings yet
- ASTM C127 - Specific Gravity and Absorption of Coarse AggregateDocument5 pagesASTM C127 - Specific Gravity and Absorption of Coarse AggregateIsaac ArturoNo ratings yet
- Velocity of SoundDocument9 pagesVelocity of SoundYcarta SleumasNo ratings yet
- All Questions of GT QuizzesDocument10 pagesAll Questions of GT QuizzesnaumanNo ratings yet
- Heat exchanger specification sheetDocument2 pagesHeat exchanger specification sheetDycka Anugerah PuryantoroNo ratings yet
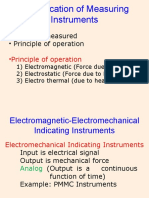
- PMMC DownloadDocument29 pagesPMMC DownloadSaumendra SarangiNo ratings yet
- Unit 6 Electricity and InventionsDocument5 pagesUnit 6 Electricity and InventionsSilvia RuedaNo ratings yet
- Holip 201207110500417645Document105 pagesHolip 201207110500417645Jose Sanchez Palma100% (2)
- Cat Simosec IngDocument4 pagesCat Simosec IngadhyarthaNo ratings yet
- Chapter 3 Weight Volume Relationships For StudentsDocument35 pagesChapter 3 Weight Volume Relationships For StudentsHahahahahahahahahaNo ratings yet
- Samsung Aqv12 PDFDocument51 pagesSamsung Aqv12 PDFTol SirtNo ratings yet