You might also like
- AWWA M28 Rehabilitation of Water Mains 3rd Ed 2014Document133 pagesAWWA M28 Rehabilitation of Water Mains 3rd Ed 2014millini67% (3)
- MR 20 Nissan PDFDocument1,639 pagesMR 20 Nissan PDFFREDYRUFO AZA MORALES83% (6)
- Hydraulic Jump ExperimentDocument10 pagesHydraulic Jump ExperimentArvin De Lara Sanchez75% (4)
- Relationship between fluid friction and velocity in pipesDocument10 pagesRelationship between fluid friction and velocity in pipesKazankapov NurlanNo ratings yet
- RC-RL and RLC CircuitsDocument15 pagesRC-RL and RLC CircuitsHaris Noushahi50% (2)
- SIC CodeDocument424 pagesSIC CodeZohra MerchantNo ratings yet
- Suppress tall building vibrations with hybrid liquid dampersDocument10 pagesSuppress tall building vibrations with hybrid liquid damperssanh137No ratings yet
- Transfer Matrix Method For Predicting Muffler Transmission LossDocument4 pagesTransfer Matrix Method For Predicting Muffler Transmission Lossconcord1103No ratings yet
- Mixing Time of Refining Vessels Stirred by Gas InjectionDocument8 pagesMixing Time of Refining Vessels Stirred by Gas InjectionПетр СамосийNo ratings yet
- Study of A Tank-Pipe Damper System For Seismic Vibration Control of StructuresDocument10 pagesStudy of A Tank-Pipe Damper System For Seismic Vibration Control of StructuresDavid SantiagoNo ratings yet
- Model 1Document68 pagesModel 1Prashanth Menon0% (1)
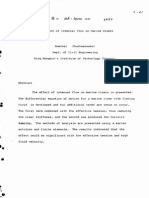
- The Effect of Internal Flow On Marine RisersDocument22 pagesThe Effect of Internal Flow On Marine RisersmokhtazulNo ratings yet
- Study of The Discharge Stream From A Standard Rushton Turbine ImpellerDocument9 pagesStudy of The Discharge Stream From A Standard Rushton Turbine ImpellerCarlos PerezNo ratings yet
- Accurate computation of wave loads on a bottom fixed circular cylinderDocument4 pagesAccurate computation of wave loads on a bottom fixed circular cylinderTrần Văn CườngNo ratings yet
- 2nd Power Fluid B 2011 Final With Model AnsweDocument7 pages2nd Power Fluid B 2011 Final With Model AnsweS.A. BeskalesNo ratings yet
- Test Pumping Test in Fractured ReservoirsDocument6 pagesTest Pumping Test in Fractured ReservoirsZulu75No ratings yet
- Surface RunoffDocument22 pagesSurface RunoffharikrishnadhitalNo ratings yet
- Bridge buffeting analysisDocument19 pagesBridge buffeting analysisThammu TulasiramNo ratings yet
- Effect of Variation of Penstock Parameter On Mechanical PowerDocument5 pagesEffect of Variation of Penstock Parameter On Mechanical PowerSEP-PublisherNo ratings yet
- Immbbhl: Grand Hotel, Taipei, TaiwanDocument17 pagesImmbbhl: Grand Hotel, Taipei, TaiwanMed Ali MaatougNo ratings yet
- Study On The Vibration Reduction of The Double Pistons Hydraulic Engine MountDocument5 pagesStudy On The Vibration Reduction of The Double Pistons Hydraulic Engine MountMukesh PadwalNo ratings yet
- Numerical Study On The Effect of Mooring Line Stiffness On Hydrodynamic Performance of Pontoon-Type Floating BreakwaterDocument6 pagesNumerical Study On The Effect of Mooring Line Stiffness On Hydrodynamic Performance of Pontoon-Type Floating Breakwatermostafa shahrabiNo ratings yet
- Dynamics of Vibrating Systems With Tuned Liquid Column Dampers and Limited Power SupplyDocument12 pagesDynamics of Vibrating Systems With Tuned Liquid Column Dampers and Limited Power SupplyFlorentza88No ratings yet
- The Institution of Engineers, Sri Lanka:) W V W (I I y T Ac The C I T e e W UDocument5 pagesThe Institution of Engineers, Sri Lanka:) W V W (I I y T Ac The C I T e e W UUmange RanasingheNo ratings yet
- Wave Breaking in Tuned Liquid DampersDocument9 pagesWave Breaking in Tuned Liquid Dampers조기현No ratings yet
- Practice Exam2 - SolutionsDocument10 pagesPractice Exam2 - SolutionsRyan KellyNo ratings yet
- Viscous Diss Tern in Energy EquationsDocument14 pagesViscous Diss Tern in Energy EquationsJohn Jonnalagadda100% (1)
- Influence of Vibration Modes on Flutter for Long BridgesDocument12 pagesInfluence of Vibration Modes on Flutter for Long BridgesmghgolNo ratings yet
- Calculation of The Transient Response of Small Orifices PDFDocument10 pagesCalculation of The Transient Response of Small Orifices PDFsunilghajuNo ratings yet
- CFD Analysis of Oscillatory Flow in a Jet Pump: Effect of Taper AngleDocument5 pagesCFD Analysis of Oscillatory Flow in a Jet Pump: Effect of Taper AnglemhdmkNo ratings yet
- Leakage Calculation Through ClearancesDocument7 pagesLeakage Calculation Through Clearanceschandrasingh4564No ratings yet
- U ManometersDocument28 pagesU ManometersGözde SalkıçNo ratings yet
- Dynamic Analysis of Railway Bridges by Means of The Spectral MethodDocument10 pagesDynamic Analysis of Railway Bridges by Means of The Spectral Methodewa1988No ratings yet
- Transport Phenomena - MSC - Lecture 9Document17 pagesTransport Phenomena - MSC - Lecture 9showravNo ratings yet
- Grid Resolution PaperDocument6 pagesGrid Resolution Paperhitokiri_01No ratings yet
- Simulating Vortex Shedding at High Reynolds NumbersDocument6 pagesSimulating Vortex Shedding at High Reynolds NumbersDeniz ümit BayraktutarNo ratings yet
- Dynamic Wave Routing ModelDocument31 pagesDynamic Wave Routing ModelPotri Janissa DalidigNo ratings yet
- Transformer-Induced Low-Frequency Oscillations in The Series-Resonant Converter Ieee - Klesser - 1991Document12 pagesTransformer-Induced Low-Frequency Oscillations in The Series-Resonant Converter Ieee - Klesser - 1991cristian1961No ratings yet
- KAZIMIERZ.rup 2008 CFD.90 Degree.bend.Square Sectioned.duct.Using.flueNTDocument16 pagesKAZIMIERZ.rup 2008 CFD.90 Degree.bend.Square Sectioned.duct.Using.flueNTOmar AssouNo ratings yet
- Hydro Turbine Model For System Dynamic StudiesDocument7 pagesHydro Turbine Model For System Dynamic StudiesAbraham Barron GarciaNo ratings yet
- Controlling Fiber Diameter in ElectrospinningDocument4 pagesControlling Fiber Diameter in ElectrospinningBS GamingNo ratings yet
- U in The Positive X: CL203, Autumn 2009Document16 pagesU in The Positive X: CL203, Autumn 2009RohanKumarNo ratings yet
- 28tamburini PDFDocument6 pages28tamburini PDFivanmatijevicNo ratings yet
- Steady Flow in PipesDocument17 pagesSteady Flow in Pipeskasandra01No ratings yet
- Application of Cyclic Operation To Acetic-Water Separation Patrut 2019Document6 pagesApplication of Cyclic Operation To Acetic-Water Separation Patrut 2019nehaNo ratings yet
- Problem SheetDocument2 pagesProblem Sheetkhushi guptaNo ratings yet
- 0207 Sin 2Document5 pages0207 Sin 2bogodavidNo ratings yet
- Calculations of Stratified Wavy Two-Phase Ow in Pipes: Petter Andreas Berthelsen, Tor YtrehusDocument22 pagesCalculations of Stratified Wavy Two-Phase Ow in Pipes: Petter Andreas Berthelsen, Tor YtrehusOmar SaeedNo ratings yet
- Across Wind Vibrations of Structures of PDFDocument25 pagesAcross Wind Vibrations of Structures of PDFAbhijeet OundhakarNo ratings yet
- Experimental Investigation of The PlungeDocument22 pagesExperimental Investigation of The PlungePrakash Duraisamy CITNo ratings yet
- Paper 11 1Document12 pagesPaper 11 1Dhananjay KadamNo ratings yet
- Che 4009 Transport Phenomena Assignment # 1Document7 pagesChe 4009 Transport Phenomena Assignment # 1Bao-Ngoc HoangNo ratings yet
- Elements of Gasdynamics Liepman PDFDocument232 pagesElements of Gasdynamics Liepman PDFprasannabalaji100% (1)
- Jcam 2013Document8 pagesJcam 2013ebrahem_sahil5188No ratings yet
- CFD Analysis of Liquid-Liquid Extraction Pulsed ColumnDocument6 pagesCFD Analysis of Liquid-Liquid Extraction Pulsed ColumnArunNo ratings yet
- HW Set 1Document6 pagesHW Set 1GsusKrystNo ratings yet
- Hydrodynamic Forces On Subsea Pipelines - KarremanDocument6 pagesHydrodynamic Forces On Subsea Pipelines - KarremanAlberto darianNo ratings yet
- Numerical Modelling of Cavitation TR InterressantDocument54 pagesNumerical Modelling of Cavitation TR Interressantkanfoudih2855No ratings yet
- Analysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowDocument13 pagesAnalysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowallentvmNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- CV J PenaDocument3 pagesCV J PenaDiego PatteriNo ratings yet
- Modal AnalysisDocument117 pagesModal AnalysisVasundhara Kumari Peddinti100% (1)
- The Fundamentals of Modal TestingDocument56 pagesThe Fundamentals of Modal TestingAsier Tejada OseguiNo ratings yet
- Structural Damage Detection Utilizing Experimental Mode ShapesDocument208 pagesStructural Damage Detection Utilizing Experimental Mode ShapesDiego PatteriNo ratings yet
- Analysis of Load Oscillations in Instrumented Impact TestingDocument10 pagesAnalysis of Load Oscillations in Instrumented Impact TestingDiego PatteriNo ratings yet
- ImperfectionsDocument10 pagesImperfectionsDiego Patteri100% (1)
- Web 5133Document118 pagesWeb 5133bbblguNo ratings yet
- Copeland CompressorDocument135 pagesCopeland CompressorsugirinNo ratings yet
- HYKDDocument15 pagesHYKDAri RamadhanNo ratings yet
- Kultura I InteligencijaDocument15 pagesKultura I InteligencijaToni JandricNo ratings yet
- TGN Level 1 No. 5 Derivation of Snow LoadDocument4 pagesTGN Level 1 No. 5 Derivation of Snow LoadjeddijNo ratings yet
- Vedic Astrology OverviewDocument1 pageVedic Astrology Overviewhuman999100% (8)
- Unit-I EsDocument53 pagesUnit-I Eschethan.naik24No ratings yet
- DPT ProcedureDocument3 pagesDPT ProcedureAmit HasanNo ratings yet
- Minicargador Cat 246Document22 pagesMinicargador Cat 246Juanca FerroNo ratings yet
- Msds PentaneDocument6 pagesMsds PentaneMuhammad FikriansyahNo ratings yet
- Unit 5 Project ManagementDocument19 pagesUnit 5 Project ManagementYashu RajNo ratings yet
- Electrolyte Turns On The Solar Cell: 2009 Project SummaryDocument1 pageElectrolyte Turns On The Solar Cell: 2009 Project SummaryAshu SarasNo ratings yet
- BR A Consumables Catalog ElecDocument31 pagesBR A Consumables Catalog Elecdweil1552No ratings yet
- Exercise Questions (Materials) .: BFT 112 Introduction To EngineeringDocument1 pageExercise Questions (Materials) .: BFT 112 Introduction To EngineeringSK DarsyanaaNo ratings yet
- Torn MeniscusDocument10 pagesTorn MeniscusKrystal Veverka100% (3)
- Management of Septic Shock in An Intermediate Care UnitDocument20 pagesManagement of Septic Shock in An Intermediate Care UnitJHNo ratings yet
- Real Talk GrammarDocument237 pagesReal Talk GrammarOmar yoshiNo ratings yet
- 25f8e d64fDocument6 pages25f8e d64fapi-233604231No ratings yet
- Ichroma™ COVID-19 Ab (With Ichroma™ II Reader) Test SystemDocument6 pagesIchroma™ COVID-19 Ab (With Ichroma™ II Reader) Test SystemGopinath AgnihotramNo ratings yet
- March 17, 2016 Strathmore TimesDocument24 pagesMarch 17, 2016 Strathmore TimesStrathmore TimesNo ratings yet
- Error Correction - Test 1Document4 pagesError Correction - Test 1phucnguyen0429No ratings yet
- SEFT Islamic care effect on hypertension patients' blood pressureDocument12 pagesSEFT Islamic care effect on hypertension patients' blood pressureSopian HadiNo ratings yet
- Gas Exchange in Plants and AnimalsDocument7 pagesGas Exchange in Plants and AnimalsMarvin MelisNo ratings yet
- JJ309 Fluid Mechanics Unit 6Document30 pagesJJ309 Fluid Mechanics Unit 6Adib AzharNo ratings yet
- Water System BOQ 16.12.2023 R0Document144 pagesWater System BOQ 16.12.2023 R0moinu85No ratings yet
- Kathrein 80010375Document2 pagesKathrein 80010375klamar5No ratings yet
- HSS Article LimitState Plastification 0718 060120Document3 pagesHSS Article LimitState Plastification 0718 060120clam2014No ratings yet
- Filtros MaquinasDocument34 pagesFiltros MaquinasAndres AlfonzoNo ratings yet