You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fire and Explosion GuidanceDocument240 pagesFire and Explosion GuidanceEric VermeulenNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- G62a Practice Guide For Agile Software Development Appendix A v1 1Document36 pagesG62a Practice Guide For Agile Software Development Appendix A v1 1Mohamed SaidNo ratings yet
- Insulation Testing Using MeggerDocument47 pagesInsulation Testing Using MeggerbruceantoNo ratings yet
- FIDIC Short Form TextDocument79 pagesFIDIC Short Form TextFaizan TayyabNo ratings yet
- MeggerDocument10 pagesMeggershahanbashaNo ratings yet
- The Konzen Pulse MotorDocument35 pagesThe Konzen Pulse MotorRODRIGO TROCONIS50% (2)
- 070 - Application of IEC 61508 and IEC 61511 Data Failure para SILDocument157 pages070 - Application of IEC 61508 and IEC 61511 Data Failure para SILSPIDERMAB33No ratings yet
- PROFIBUS Design Good Practices 2011Document38 pagesPROFIBUS Design Good Practices 2011ariekarp100% (1)
- General Control ValvesDocument42 pagesGeneral Control ValvesEric Vermeulen100% (1)
- Agile Planning, Tracking, and Project Management Boot Camp SampleDocument101 pagesAgile Planning, Tracking, and Project Management Boot Camp SampleEric VermeulenNo ratings yet
- Windows Server 2003 Server Cluster ArchitectureDocument33 pagesWindows Server 2003 Server Cluster ArchitectureWaldir Cruz RamosNo ratings yet
- Teleprotection EquipmentDocument33 pagesTeleprotection EquipmentEric VermeulenNo ratings yet
- Intelligent GuideDocument32 pagesIntelligent GuideShady AlsrougyNo ratings yet
- White Paper AlarmsDocument64 pagesWhite Paper AlarmsHeru PurwantoNo ratings yet
- Initial Design Discussion: What The Project Engineer Needs To KnowDocument29 pagesInitial Design Discussion: What The Project Engineer Needs To KnowEric VermeulenNo ratings yet
- About The Design of Distributed Control SystemsDocument12 pagesAbout The Design of Distributed Control SystemsEric VermeulenNo ratings yet
- Construction Law Journal 2003 PDFDocument9 pagesConstruction Law Journal 2003 PDFsomapala88No ratings yet
- By: Stephan J. Sosik, CEO Process-Logic, LLC: Scada Systems in Wastewater TreatmentDocument34 pagesBy: Stephan J. Sosik, CEO Process-Logic, LLC: Scada Systems in Wastewater Treatmenttibi1000No ratings yet
- 2 Winding Transformer ModelsDocument3 pages2 Winding Transformer ModelsEric VermeulenNo ratings yet
- CCTV Surveillance System Network Design GuideDocument25 pagesCCTV Surveillance System Network Design GuideSidrah TariqNo ratings yet
- Cascade Control - Handle Processes That Challenge Regular PID ControlDocument3 pagesCascade Control - Handle Processes That Challenge Regular PID ControlHayden Lovett100% (2)
- Apricot 04 Metro Ethernet Arch Wdec - FinalDocument97 pagesApricot 04 Metro Ethernet Arch Wdec - FinalShuaib MujahidNo ratings yet
- Process Control SystemsDocument242 pagesProcess Control SystemsAbdul_KSANo ratings yet
- Manual Fiber Amplifier Setup GuideDocument14 pagesManual Fiber Amplifier Setup GuideTheodora StefanNo ratings yet
- BCR16PMDocument12 pagesBCR16PMGuillermo HernandezNo ratings yet
- Kuhnke IA Series RelaysDocument4 pagesKuhnke IA Series RelaysnebiyouNo ratings yet
- Hager IN Retail Pricelist - May 2019Document8 pagesHager IN Retail Pricelist - May 2019chauhanrinkuNo ratings yet
- 3025a 3125a eDocument2 pages3025a 3125a eRaffa Maulana Al FatihNo ratings yet
- PT SCHNEIDER INDONESIA PiX Installation GuidelineDocument21 pagesPT SCHNEIDER INDONESIA PiX Installation GuidelineHANIF AKBARNo ratings yet
- Compactador Neumatico CaterpillarDocument2 pagesCompactador Neumatico CaterpillarAnonymous KOtSfT6qNo ratings yet
- Transistor 2N7000 DatasheheetDocument7 pagesTransistor 2N7000 DatasheheetMuhammadUsamaNo ratings yet
- Nte 101-200Document11 pagesNte 101-200api-242591736No ratings yet
- ErviceDocument103 pagesErviceHitesh PanigrahiNo ratings yet
- Features DescriptionDocument24 pagesFeatures DescriptionAhmad SubkhanNo ratings yet
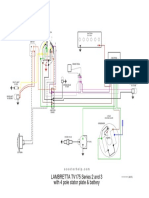
- Diagrama Electrico Lambretta 175 Serie 2 BDocument1 pageDiagrama Electrico Lambretta 175 Serie 2 BCamiloNo ratings yet
- Ystems Nternational Iochemical: Spare Parts Map Lab & Map Lab Plus MLP - SP - 01 - 2006Document4 pagesYstems Nternational Iochemical: Spare Parts Map Lab & Map Lab Plus MLP - SP - 01 - 2006Reynaldo ZavalaNo ratings yet
- 04-20kva Alternator Data Sheet Es10456927-N20g4-D-W212-20Document4 pages04-20kva Alternator Data Sheet Es10456927-N20g4-D-W212-20Muse AFNo ratings yet
- Installation Metal Clad BushingDocument12 pagesInstallation Metal Clad BushingFernando TorresNo ratings yet
- Tank ElevatorDocument28 pagesTank ElevatorchinnaraoNo ratings yet
- Catalogo Surgelogic Tvs2xw100cDocument12 pagesCatalogo Surgelogic Tvs2xw100chenryvargas238565No ratings yet
- 7SS60 Catalog SIP E7 PDFDocument16 pages7SS60 Catalog SIP E7 PDFJames FitzGeraldNo ratings yet
- Test Your Motor Control IQDocument1 pageTest Your Motor Control IQboy2959No ratings yet
- Location HD 325-6Document25 pagesLocation HD 325-6gire_3pich2005No ratings yet
- SECTION 413-06 HornDocument3 pagesSECTION 413-06 HornTiến Phát Công ty TNHH Đầu Tư Xây DựngNo ratings yet
- Inspection Notice (LV Installation)Document1 pageInspection Notice (LV Installation)Ahmed MamdohNo ratings yet
- Slides Ch2 Devices PDFDocument28 pagesSlides Ch2 Devices PDFSatya SahaNo ratings yet
- M/s. Hindustan Zinc Limited, Kayad Mine, Ajmer.: Test Report For Motor Protection RelayDocument8 pagesM/s. Hindustan Zinc Limited, Kayad Mine, Ajmer.: Test Report For Motor Protection RelayKIRUBANESANNo ratings yet
- Surface Mount Bridge Rectifier GuideDocument2 pagesSurface Mount Bridge Rectifier GuideHabHabNo ratings yet
- DC MachineDocument16 pagesDC MachineUjlayan HimanshuNo ratings yet
- Solid State Drives - Lecture Notes, Study Material and Important Questions, AnswersDocument4 pagesSolid State Drives - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- MG J2 Wiring DiagramDocument1 pageMG J2 Wiring DiagramAdam ShneierNo ratings yet