You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- DC to AC Converter (Inverter) FundamentalsDocument15 pagesDC to AC Converter (Inverter) FundamentalsmadihaNo ratings yet
- Mechanical Sensors Guide - Position, Motion, Pressure & Flow MeasurementDocument16 pagesMechanical Sensors Guide - Position, Motion, Pressure & Flow MeasurementmadihaNo ratings yet
- Chapter 1 PLC OverviewDocument55 pagesChapter 1 PLC OverviewmadihaNo ratings yet
- SCR and Thyristor ControlDocument29 pagesSCR and Thyristor ControlIanNo ratings yet
- Lecture 1-Single-Phase-Controlled-RectifiersDocument41 pagesLecture 1-Single-Phase-Controlled-RectifiersmadihaNo ratings yet
- Mechanical Sensors Guide - Position, Motion, Pressure & Flow MeasurementDocument16 pagesMechanical Sensors Guide - Position, Motion, Pressure & Flow MeasurementmadihaNo ratings yet
- Comsats University Islamabad, Lahore Campus: Quiz # 2 - SP20Document2 pagesComsats University Islamabad, Lahore Campus: Quiz # 2 - SP20madiha100% (1)
- Chapter 5 DC To DC Converters: OutlineDocument25 pagesChapter 5 DC To DC Converters: OutlinemadihaNo ratings yet
- Introduction To Industrial ElectronicsDocument39 pagesIntroduction To Industrial ElectronicsmadihaNo ratings yet
- Week 4-Video Lecture LinksDocument1 pageWeek 4-Video Lecture LinksmadihaNo ratings yet
- DC-AC Conversion - Lecture 10, 11 and 12Document45 pagesDC-AC Conversion - Lecture 10, 11 and 12madiha100% (1)
- Ee-210 Analog Digital Electronics Final Examination Q No.1Document3 pagesEe-210 Analog Digital Electronics Final Examination Q No.1madihaNo ratings yet
- DC to AC Converter (Inverter) FundamentalsDocument15 pagesDC to AC Converter (Inverter) FundamentalsmadihaNo ratings yet
- ECE 4142 CHAPTER 10 POWER ELECTRONICS CONTROLLED RECTIFIERSDocument16 pagesECE 4142 CHAPTER 10 POWER ELECTRONICS CONTROLLED RECTIFIERSmadihaNo ratings yet
- Buck, Boost & Buck-Boost Regulator Design LecturesDocument1 pageBuck, Boost & Buck-Boost Regulator Design LecturesmadihaNo ratings yet
- Week 1-Video Lecture LinksDocument1 pageWeek 1-Video Lecture LinksmadihaNo ratings yet
- The Power in The Battery Is in DC Mode and The Motor That Drives The Wheels Usually Uses AC PowerDocument7 pagesThe Power in The Battery Is in DC Mode and The Motor That Drives The Wheels Usually Uses AC PowermadihaNo ratings yet
- PhysicsDocument2 pagesPhysicsmadihaNo ratings yet
- Applied Math Quiz 2Document1 pageApplied Math Quiz 2madihaNo ratings yet
- MATH 304 Linear Algebra Vector SpacesDocument14 pagesMATH 304 Linear Algebra Vector SpacesHamidNo ratings yet
- COMSATS University Islamabad, Lahore Campus Department of Electrical and Computer Engineering Preparation of Online Courses Spring 2020 (Phase-II)Document3 pagesCOMSATS University Islamabad, Lahore Campus Department of Electrical and Computer Engineering Preparation of Online Courses Spring 2020 (Phase-II)madihaNo ratings yet
- Applied Math Quiz 2Document1 pageApplied Math Quiz 2madihaNo ratings yet
- Power Elec Notes 07a Intro To DC-DC ConvertersDocument59 pagesPower Elec Notes 07a Intro To DC-DC ConvertersmadihaNo ratings yet
- EPE352 DC-DC ConverterDocument32 pagesEPE352 DC-DC Converterpriyanshu100% (1)
- Design Analysis of Buck and Boost ConvertersDocument17 pagesDesign Analysis of Buck and Boost ConvertersmadihaNo ratings yet
- Jeas 1212 824 3Document9 pagesJeas 1212 824 3madihaNo ratings yet
- Iceict2015i020315001 PDFDocument6 pagesIceict2015i020315001 PDFmadihaNo ratings yet
- FPGA Based PWM Techniques For Controlling InverterDocument48 pagesFPGA Based PWM Techniques For Controlling InverterCitharthan Magendran100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Actively Clamped Bidirectional Flyback Converter PDFDocument10 pagesActively Clamped Bidirectional Flyback Converter PDFArceu CamposNo ratings yet
- Chipset CompareDocument2 pagesChipset CompareboodzillaNo ratings yet
- List of Pre Com ITRDocument3 pagesList of Pre Com ITRmashanghNo ratings yet
- Acer Aspire 4738G (Quanta ZQ9) Laptop SchematicsDocument35 pagesAcer Aspire 4738G (Quanta ZQ9) Laptop SchematicsCempli BranomNo ratings yet
- Integrated Control and Safety System (ICSS) TGS Bill of MaterialDocument9 pagesIntegrated Control and Safety System (ICSS) TGS Bill of MaterialFatholla SalehiNo ratings yet
- ROTALIGN-smart-RS5 EX 8 DOC-12.405 en PDFDocument8 pagesROTALIGN-smart-RS5 EX 8 DOC-12.405 en PDFAlexandr StupachenkoNo ratings yet
- LM-380EZ Instruction ManualDocument61 pagesLM-380EZ Instruction ManualCongNo ratings yet
- Lemon PowerDocument2 pagesLemon Powerapi-385956544No ratings yet
- Emfis Plus CommunicationDocument24 pagesEmfis Plus CommunicationSanthosh OsNo ratings yet
- Intel 945g Manual de UsuarioDocument39 pagesIntel 945g Manual de UsuarioDavid NavarroNo ratings yet
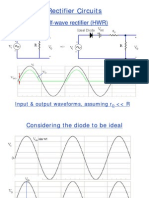
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- DELTA 4000: Reference Manual Applications GuideDocument48 pagesDELTA 4000: Reference Manual Applications GuideYan Lin AungNo ratings yet
- Sun Power Pakistan: 3KW Solar System ProposalDocument4 pagesSun Power Pakistan: 3KW Solar System ProposalSufyan WahabNo ratings yet
- Sps0650en Poka YokeDocument8 pagesSps0650en Poka Yokepatima_sv4875No ratings yet
- Genaral Catalog PLC PanasonicDocument36 pagesGenaral Catalog PLC Panasonicpeter08068350% (2)
- Electrico ProStar PDFDocument405 pagesElectrico ProStar PDFJ Angel Wolf Maketas50% (2)
- Uniwill U40ii1 - MB RC 1207 (37gu41000-10) U40ii1 MB RC 0104Document33 pagesUniwill U40ii1 - MB RC 1207 (37gu41000-10) U40ii1 MB RC 0104sousalrNo ratings yet
- HCC/HCF4000B-4001B HCC/HCF4002B-4025B: Nor GateDocument13 pagesHCC/HCF4000B-4001B HCC/HCF4002B-4025B: Nor Gatedhiya auliaNo ratings yet
- Analysis of Helical Transmission Lines by Means of The Complete Circuit Equations-JoiDocument12 pagesAnalysis of Helical Transmission Lines by Means of The Complete Circuit Equations-JoieragonindiaNo ratings yet
- Speed Control of Three Phase Induction MotorDocument28 pagesSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Philips 70fc930 Cassette Deck Service Manual (Indexed)Document55 pagesPhilips 70fc930 Cassette Deck Service Manual (Indexed)Ugo RampazzoNo ratings yet
- Frequency Domain FiltersDocument43 pagesFrequency Domain FiltersRakesh InaniNo ratings yet
- Ds Datalog8 040416 UkDocument2 pagesDs Datalog8 040416 UkMohamed IbrahimNo ratings yet
- WhirlpoolDocument23 pagesWhirlpoolmrfarhatNo ratings yet
- PV Solar Proposal: Harmon ElectricDocument18 pagesPV Solar Proposal: Harmon ElectricArka EnergyNo ratings yet
- Hwuaei Es1201 ManualDocument30 pagesHwuaei Es1201 ManualAnonymous fnFwazyINo ratings yet
- Manual Rele SickDocument6 pagesManual Rele SickElian SilvaNo ratings yet
- 132/11kV Substation Standard Cable ScheduleDocument28 pages132/11kV Substation Standard Cable ScheduleBilal JavaidNo ratings yet
- W810i Service ManualDocument53 pagesW810i Service Manualamdomalik100% (2)
- Eaton Cutler Hammer Iponi Rs485Document8 pagesEaton Cutler Hammer Iponi Rs485Diana GaonaNo ratings yet