You might also like
- Medidas de posição estatísticasDocument17 pagesMedidas de posição estatísticasLucas Henrique AndradeNo ratings yet
- UFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideDocument2 pagesUFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideLucas RodolfoNo ratings yet
- Simulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesDocument3 pagesSimulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesJose Felipe Lopes100% (1)
- Questões Aulão ENEM Mat1Document6 pagesQuestões Aulão ENEM Mat1Virginia PaulinoNo ratings yet
- AAP - Matemática - 1 Série Do Ensino MédioDocument12 pagesAAP - Matemática - 1 Série Do Ensino MédioWendler Santos100% (2)
- ART Desmontagem e Montagem de PneusDocument8 pagesART Desmontagem e Montagem de PneusGustavo MauryNo ratings yet
- Análise Funcional Curso Pós-GraduaçãoDocument61 pagesAnálise Funcional Curso Pós-GraduaçãoMR100% (1)
- Calculo Estrutural Linha de VidaDocument6 pagesCalculo Estrutural Linha de VidaDaniel SimiãoNo ratings yet
- 6 Ano LivroDocument384 pages6 Ano LivroJoão CarlosNo ratings yet
- Lista de Exercícios 1 PDFDocument3 pagesLista de Exercícios 1 PDFWermersonNo ratings yet
- Lista Afim Quad Mod ExtraDocument71 pagesLista Afim Quad Mod ExtraCristina MariaNo ratings yet
- Questões Física II ADocument2 pagesQuestões Física II AErikikoNo ratings yet
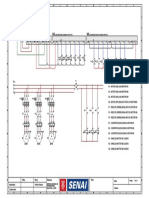
- Esquema elétrico de um sistema de controle de motoresDocument1 pageEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaNo ratings yet
- Aplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespDocument93 pagesAplicação de Válvulas Redutoras de Pressão Na Redução de Perdas Reais em Redes de Distribuição de Água Na Unidade de Neócio Leste - SabespRafael HoraNo ratings yet
- MPCDocument19 pagesMPCRúben BarbosaNo ratings yet
- Trigonometria No Dia A DiaDocument7 pagesTrigonometria No Dia A DiaMarta SofiaNo ratings yet
- Relatório de FlambagemDocument26 pagesRelatório de FlambagemRaphael Rodrigues MirandaNo ratings yet
- Isoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDocument24 pagesIsoladas Matematica Do Zero Na FCC Dudan Aula 3 ResolvidoDavid XavierNo ratings yet
- Roteiro PIC2021 G2 Ciclo6Document25 pagesRoteiro PIC2021 G2 Ciclo6Nickerson OliveiraNo ratings yet
- O realismo em Popper e Peirce: um contraponto filosóficoDocument13 pagesO realismo em Popper e Peirce: um contraponto filosóficoRaquel Rosalia AdamiNo ratings yet
- Eletrização e Princípios da EletrostáticaDocument29 pagesEletrização e Princípios da EletrostáticaEvandroVianaNo ratings yet
- IA 1 - Resolução de Problemas Por Meio de BuscasDocument27 pagesIA 1 - Resolução de Problemas Por Meio de BuscasOsvaldo Geraldo ManjateNo ratings yet
- Capitulo1 PDFDocument133 pagesCapitulo1 PDFhemersonNo ratings yet
- Índices preçosDocument6 pagesÍndices preçosClara GomesNo ratings yet
- Medidas de tendência central e dispersão em estatística descritivaDocument12 pagesMedidas de tendência central e dispersão em estatística descritivaVera SilvaNo ratings yet
- Multiplexadores e Demultiplexadores (ART159)Document12 pagesMultiplexadores e Demultiplexadores (ART159)Valdir JuniorNo ratings yet
- Movimento em Duas e Três DimensõesDocument41 pagesMovimento em Duas e Três DimensõesAndreas KneipNo ratings yet
- 10 1 1 468 539 PDFDocument295 pages10 1 1 468 539 PDFVitor HugoNo ratings yet
- Fundamentos de Eletrotécnica para Técnicos em EletrônicaDocument221 pagesFundamentos de Eletrotécnica para Técnicos em EletrônicaVilson Pimmel100% (1)
- Teste avalia leitura 1o-2o ciclosDocument25 pagesTeste avalia leitura 1o-2o ciclosPaula Maciel100% (5)