You might also like
- Chapter 6Document60 pagesChapter 6Muhammad NursalamNo ratings yet
- Innovative stroller design for hypermarketsDocument1 pageInnovative stroller design for hypermarketsMuhammad NursalamNo ratings yet
- The Effect of Using Different Weights of Caustic SodaDocument63 pagesThe Effect of Using Different Weights of Caustic SodaMuhammad NursalamNo ratings yet
- The Effect of Using Different Weights of Caustic SodaDocument63 pagesThe Effect of Using Different Weights of Caustic SodaMuhammad NursalamNo ratings yet
- Ebenezer Parker's ThesisDocument62 pagesEbenezer Parker's ThesisMuhammad NursalamNo ratings yet
- Banana Trunk As A Lost Circulation Material in Hydrocarbon Drilling FluidDocument41 pagesBanana Trunk As A Lost Circulation Material in Hydrocarbon Drilling FluidMuhammad Nursalam100% (2)
- Evaluating Sugarcane Bagasse as an Eco-Friendly Lost Circulation MaterialDocument43 pagesEvaluating Sugarcane Bagasse as an Eco-Friendly Lost Circulation MaterialMuhammad NursalamNo ratings yet
- Subsea Production System - OverviewDocument24 pagesSubsea Production System - OverviewMuhammad NursalamNo ratings yet
- Banana Trunk As A Lost Circulation Material in Hydrocarbon Drilling FluidDocument41 pagesBanana Trunk As A Lost Circulation Material in Hydrocarbon Drilling FluidMuhammad Nursalam100% (2)
- Composition and Method of Controlling Lost Circulation From WellboresDocument4 pagesComposition and Method of Controlling Lost Circulation From WellboresMuhammad NursalamNo ratings yet
- Evaluating The Effects of Additives On D PDFDocument12 pagesEvaluating The Effects of Additives On D PDFMuhammad NursalamNo ratings yet
- Material For Recovering Lost Circulation in WellsDocument4 pagesMaterial For Recovering Lost Circulation in WellsMuhammad NursalamNo ratings yet
- Evaluating Sugarcane Bagasse as an Eco-Friendly Lost Circulation MaterialDocument43 pagesEvaluating Sugarcane Bagasse as an Eco-Friendly Lost Circulation MaterialMuhammad NursalamNo ratings yet
- Subsea Production System - OverviewDocument24 pagesSubsea Production System - OverviewMuhammad Nursalam100% (1)
- Study On Rice Husk As Lost Circulation MaterialDocument52 pagesStudy On Rice Husk As Lost Circulation MaterialMuhammad Nursalam100% (1)
- Sizing and Wall ThicknessDocument37 pagesSizing and Wall ThicknessMuhammad NursalamNo ratings yet
- The Effect of Using Different Weights of Caustic SodaDocument63 pagesThe Effect of Using Different Weights of Caustic SodaMuhammad NursalamNo ratings yet
- PumpsDocument80 pagesPumpsMuhammad Nursalam100% (1)
- CompressorDocument22 pagesCompressorMuhammad Nursalam100% (1)
- SynopsisDocument3 pagesSynopsisMuhammad NursalamNo ratings yet
- Subsea Production System - OverviewDocument24 pagesSubsea Production System - OverviewMuhammad NursalamNo ratings yet
- Hominid EvolutionDocument2 pagesHominid EvolutionJosephine TorresNo ratings yet
- Chapter 3 - Inflation and Escalation 10102016Document11 pagesChapter 3 - Inflation and Escalation 10102016Muhammad NursalamNo ratings yet
- Well TestDocument4 pagesWell TestMuhammad NursalamNo ratings yet
- Taylor Series and PolynomialsDocument19 pagesTaylor Series and PolynomialsBenni WewokNo ratings yet
- Tutorial 5Document3 pagesTutorial 5Muhammad NursalamNo ratings yet
- Hybrid Input Shaping and Non-Collocated PID Control of A Gantry Crane System - Comparative AssessmentDocument6 pagesHybrid Input Shaping and Non-Collocated PID Control of A Gantry Crane System - Comparative AssessmentMuhammad NursalamNo ratings yet
- BirdbrainDocument1 pageBirdbrainplastoneNo ratings yet
- Tech Note Multi Phase Flow ModelsDocument5 pagesTech Note Multi Phase Flow ModelsAristides H Garcia ReyesNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- KRYPTOSPHERE TechnologyDocument20 pagesKRYPTOSPHERE TechnologySoniale Sánchez GómezNo ratings yet
- Power Generation SystemDocument72 pagesPower Generation SystemAbshir Mohamed HajjiNo ratings yet
- Spe 21970 MSDocument13 pagesSpe 21970 MSasu jaranNo ratings yet
- RAIS PDA AppDocument8 pagesRAIS PDA Appzaw lin ooNo ratings yet
- 937 Letter AttchamentDocument8 pages937 Letter AttchamentNeeta RautelaNo ratings yet
- Atmospheric Water Generator DesignDocument9 pagesAtmospheric Water Generator Designscribd2No ratings yet
- CH 1Document13 pagesCH 1badgujar_bandhuNo ratings yet
- Classification ISO 8217 (2005)Document5 pagesClassification ISO 8217 (2005)Salah JallaliNo ratings yet
- Mahaan FoodsDocument49 pagesMahaan Foodsamandeep0001No ratings yet
- Mayo College: Dining Hall at AjmerDocument79 pagesMayo College: Dining Hall at AjmerFaquruddinNo ratings yet
- Ncert Summary Class 12th PhysicsDocument29 pagesNcert Summary Class 12th Physicsmeghraj.socialNo ratings yet
- Diesel Engines for Unrestricted Continuous OperationDocument2 pagesDiesel Engines for Unrestricted Continuous OperationJorge Bellido100% (1)
- Galcon ProductDocument69 pagesGalcon Productapi-36492444No ratings yet
- B23 B24 User Manual PDFDocument168 pagesB23 B24 User Manual PDFAurel BodenmannNo ratings yet
- 2007 Bachu Etal CO2 Storage Capacity EstimationDocument14 pages2007 Bachu Etal CO2 Storage Capacity EstimationArindam Obzi GuptaNo ratings yet
- E PM 100Document29 pagesE PM 100masoudNo ratings yet
- TERAO Presentation August 2022Document48 pagesTERAO Presentation August 2022LuatNguyenNo ratings yet
- Production Range: EUROPIPE. The World Trusts UsDocument8 pagesProduction Range: EUROPIPE. The World Trusts UsIslam-Lotfi Hadj-ArabNo ratings yet
- Wind Energy - University QuesDocument2 pagesWind Energy - University QuesKsn Hari100% (2)
- Fluid KinematicsDocument49 pagesFluid KinematicsJM Jusay CarabLeNo ratings yet
- Pepsin Enzyme Activity LabDocument4 pagesPepsin Enzyme Activity LabDebrah DebbieNo ratings yet
- Damper mechanism details for Atlas Copco rock drills under 40 charactersDocument27 pagesDamper mechanism details for Atlas Copco rock drills under 40 characterssalvador341100% (2)
- 11 5 Temperature and Pressure 4th EdDocument18 pages11 5 Temperature and Pressure 4th Edapi-267245178No ratings yet
- Lightning Protection System Design PDFDocument46 pagesLightning Protection System Design PDFhportezNo ratings yet
- CH 3 Gas Refrigeration CycleDocument20 pagesCH 3 Gas Refrigeration CycleMeleseNo ratings yet
- Transfer Switching Equipment 100, 200, 260, 400A: Instr Uction ManualDocument32 pagesTransfer Switching Equipment 100, 200, 260, 400A: Instr Uction ManualMesseňger HệŢhốngNo ratings yet
- Operator's Manual-TT55-TT65-TT75-English PDFDocument129 pagesOperator's Manual-TT55-TT65-TT75-English PDFvalgorunescu@hotmail.com88% (16)
- Delta Ia-Mds Vfd-Ed Um en 20150910-1Document280 pagesDelta Ia-Mds Vfd-Ed Um en 20150910-1FahadNo ratings yet
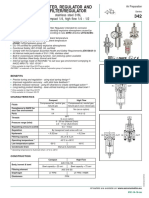
- Numatics Series 342Document6 pagesNumatics Series 342Jebran FarazNo ratings yet
- Amcor 2016Document69 pagesAmcor 2016Romulo AlvesNo ratings yet