You might also like
- PLC Based Elevator Control System-1Document26 pagesPLC Based Elevator Control System-1Belete GetachewNo ratings yet
- PLC Based ElevatorDocument10 pagesPLC Based ElevatorShisir KandelNo ratings yet
- Manual-RFID Elevator Controller Manual InstructionDocument22 pagesManual-RFID Elevator Controller Manual InstructionFERNSNo ratings yet
- H1000 Elevator Control: Installation GuideDocument20 pagesH1000 Elevator Control: Installation GuideEillen CabezasNo ratings yet
- Elevator Control Circuit Diagram GuideDocument7 pagesElevator Control Circuit Diagram GuideNanotech NilsiNo ratings yet
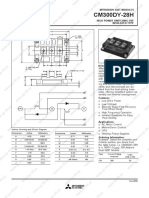
- IGBT Modules for High Power SwitchingDocument4 pagesIGBT Modules for High Power SwitchingRaul GutierrezNo ratings yet
- ETSD Emergency TRaction Slowdown Test ProcedureDocument5 pagesETSD Emergency TRaction Slowdown Test ProcedurefreddyjoertyNo ratings yet
- Simply Handbook of Debugging (F5021-32 Bit Board)Document3 pagesSimply Handbook of Debugging (F5021-32 Bit Board)thanggimme.phanNo ratings yet
- MEV Installation GuideDocument157 pagesMEV Installation GuideNam LibraNo ratings yet
- HSVF HSVF HSVF HSVF Adjustment Manual Adjustment Manual Adjustment Manual Adjustment ManualDocument20 pagesHSVF HSVF HSVF HSVF Adjustment Manual Adjustment Manual Adjustment Manual Adjustment ManualJesús David Diaz MontesNo ratings yet
- Vol88 PDFDocument32 pagesVol88 PDFArnold Thamrin van LutteranNo ratings yet
- Brake Board Manual: Operation GuideDocument17 pagesBrake Board Manual: Operation GuideMohamedElsawiNo ratings yet
- SIGMA S8 Quick Debugging GuideDocument14 pagesSIGMA S8 Quick Debugging GuideTroubleshootingNo ratings yet
- Homex SVTDocument23 pagesHomex SVTAlan TacherNo ratings yet
- Triplex For MCTCDocument2 pagesTriplex For MCTCprasadNo ratings yet
- How lifts work: components and systemsDocument4 pagesHow lifts work: components and systemsmikko intalNo ratings yet
- Elex Door - Mitsubishi PLCDocument16 pagesElex Door - Mitsubishi PLCHiei_zoldyckNo ratings yet
- Esc Wbt2 - MasterDocument7 pagesEsc Wbt2 - Masterrendy kurniawanNo ratings yet
- Portable Elevator Tool 7100 1120 302 A0Document33 pagesPortable Elevator Tool 7100 1120 302 A0Mhamad ArabiNo ratings yet
- PLC Technology TrainerDocument15 pagesPLC Technology Trainerladabd2No ratings yet
- Elevator Programming CodeDocument178 pagesElevator Programming Code100mphNo ratings yet
- Schematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Document44 pagesSchematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Mohamed AdamNo ratings yet
- Esquemas KONE 2009 PDFDocument35 pagesEsquemas KONE 2009 PDFkristerNo ratings yet
- ACRA System Start Up Routine GuideDocument101 pagesACRA System Start Up Routine Guideomotu79No ratings yet
- Step Chain MaintenanceDocument4 pagesStep Chain MaintenanceRenato KaindoyNo ratings yet
- (OS18-11-06) ELD Power Cable Wiring PDFDocument1 page(OS18-11-06) ELD Power Cable Wiring PDFRachmad Maulana RamadhanNo ratings yet
- Operating Manual ArdDocument13 pagesOperating Manual Ardkolwin .chindwinNo ratings yet
- PLC Problems PDFDocument5 pagesPLC Problems PDFNyan Linn HtunNo ratings yet
- Door Operation Controller Drive BLDCDocument20 pagesDoor Operation Controller Drive BLDCБахтияр ЮмачиковNo ratings yet
- Hitachi SJ300-EL Series Inverter For Elevator Applications Instruction Manual SupplementDocument43 pagesHitachi SJ300-EL Series Inverter For Elevator Applications Instruction Manual SupplementSamnit NUOMNo ratings yet
- F3 9000 EngDocument7 pagesF3 9000 Engjohn_kyrNo ratings yet
- Elevator History and Functions and The Invention of This Amazing Piece of WorkDocument69 pagesElevator History and Functions and The Invention of This Amazing Piece of Workjay vallejosNo ratings yet
- Elevator Management System Software4.13 Operation ManualDocument65 pagesElevator Management System Software4.13 Operation ManualAtaur RahamanNo ratings yet
- Facebook Group ElevadoristasDocument10 pagesFacebook Group ElevadoristaselectroliticoNo ratings yet
- 7096Document8 pages7096Ema RahamanNo ratings yet
- EC100 Elevator Intelligent Integrated Machine Control System OverviewDocument252 pagesEC100 Elevator Intelligent Integrated Machine Control System OverviewБахтияр ЮмачиковNo ratings yet
- MagnubroucherDocument12 pagesMagnubroucherrmdarisaNo ratings yet
- Supervisor - Elevators & Escalators TestsDocument17 pagesSupervisor - Elevators & Escalators TestsSUNDAR TNo ratings yet
- BL 2000Document132 pagesBL 2000Samuel AcevedoNo ratings yet
- 2023 Escalator Pre Inspection Checklist 20230110fillableDocument3 pages2023 Escalator Pre Inspection Checklist 20230110fillablevikrant9870% (1)
- Emergency Lift Rescue Device (A.R.D.) Automatically Safely Evacuates PassengersDocument3 pagesEmergency Lift Rescue Device (A.R.D.) Automatically Safely Evacuates PassengersbernabasNo ratings yet
- ElevatorDocument21 pagesElevatormmzzzNo ratings yet
- Implementation of An 8 Floor Control System With A PDFDocument105 pagesImplementation of An 8 Floor Control System With A PDFtariqNo ratings yet
- 229-Feedback 34 150-Feedback 34 150 ElevatorDocument2 pages229-Feedback 34 150-Feedback 34 150 Elevatorrajabcomp2No ratings yet
- Car Parking SP SystemDocument4 pagesCar Parking SP System61engineer61No ratings yet
- Elevator Violation CodesDocument31 pagesElevator Violation Codeshossam hassanNo ratings yet
- Icontrol DC Aug 08 Rel 42-02-7222 B7Document788 pagesIcontrol DC Aug 08 Rel 42-02-7222 B7ElputoAmo XDNo ratings yet
- Layout Open Lift Central Library A BlockDocument4 pagesLayout Open Lift Central Library A BlockPrateek JhanjiNo ratings yet
- MLC 8000 Manual EnglishDocument213 pagesMLC 8000 Manual EnglishRebecca DangNo ratings yet
- Escalator&Moving Walk Controller - ZXK1600 - User ManualDocument23 pagesEscalator&Moving Walk Controller - ZXK1600 - User ManualKen LeeNo ratings yet
- Gma EDocument5 pagesGma EDull Rahim100% (1)
- Hyundai-Cat 4390037 PDFDocument24 pagesHyundai-Cat 4390037 PDFbagus fauziNo ratings yet
- A2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDDocument85 pagesA2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDJesús David Diaz MontesNo ratings yet
- Elevator Control SystemDocument15 pagesElevator Control SystemAdityaGupta100% (1)
- Description of Common Fault Codes For Fujitec CP28 Controller Elevator p2Document3 pagesDescription of Common Fault Codes For Fujitec CP28 Controller Elevator p2thanggimme.phanNo ratings yet
- U2Document4 pagesU2TouficFereidNo ratings yet
- Elevator Violation CodesDocument31 pagesElevator Violation CodesAnonymous YzSzB0rpNKNo ratings yet
- Use and Maintenance of Elevator Guide ShoesDocument5 pagesUse and Maintenance of Elevator Guide ShoesGERARDO GABAY100% (1)
- Nov 162845Document6 pagesNov 162845hassanaagibNo ratings yet
- Centralized Control ElevatorDocument37 pagesCentralized Control ElevatorpandyakaviNo ratings yet
- Assignment 1Document4 pagesAssignment 1Mehul GargNo ratings yet
- Lec3 Harrod-Domar GrowthDocument17 pagesLec3 Harrod-Domar GrowthMehul GargNo ratings yet
- Solow Growth ModelDocument28 pagesSolow Growth ModelMehul GargNo ratings yet
- TI-36X Pro GuidebookDocument78 pagesTI-36X Pro Guidebookmenilanjan89nL100% (1)
- Chapter 2 Money MarketDocument11 pagesChapter 2 Money MarketMehul GargNo ratings yet
- Major Project End Sem EvaluationDocument19 pagesMajor Project End Sem EvaluationMehul GargNo ratings yet
- 7-bit Binary Adder Module Verilog CodeDocument1 page7-bit Binary Adder Module Verilog CodeMehul GargNo ratings yet
- B.tech. IV Yr. (Vii Semester) Timetable, Odd Semester 2014 (Combined) Jiit128Document2 pagesB.tech. IV Yr. (Vii Semester) Timetable, Odd Semester 2014 (Combined) Jiit128Mehul GargNo ratings yet
- CG Book 3rd EditionDocument385 pagesCG Book 3rd EditionMarieke KortsmitNo ratings yet
- Final Reportv3Document29 pagesFinal Reportv3Mehul GargNo ratings yet
- Word List 14Document5 pagesWord List 14Vishnu PrasanthNo ratings yet
- TTDocument2 pagesTTMehul GargNo ratings yet
- True/False: List of Attempted Questions and AnswersDocument15 pagesTrue/False: List of Attempted Questions and AnswersDeepak Kumar VermaNo ratings yet
- STAAD Structural Analysis Software DocumentDocument84 pagesSTAAD Structural Analysis Software DocumentSabu Abdul NoorNo ratings yet
- CSEC Spanish January P2 2024-1Document24 pagesCSEC Spanish January P2 2024-1Sajiv JadoonananNo ratings yet
- ICC ES Report: Barsplice Products, IncDocument6 pagesICC ES Report: Barsplice Products, IncXiomara Muñoz MendozaNo ratings yet
- UA Checkliste VPD Verfahren enDocument3 pagesUA Checkliste VPD Verfahren enBharadwaja ReddyNo ratings yet
- Philips 26 PFL 3405 Chassis Tpn1.1e-La SM PDFDocument63 pagesPhilips 26 PFL 3405 Chassis Tpn1.1e-La SM PDFViorel GabrielNo ratings yet
- Bitcoin Thesis FinalDocument18 pagesBitcoin Thesis Finalapi-319365102No ratings yet
- Matriks Compressor 2023Document27 pagesMatriks Compressor 2023Puji RustantoNo ratings yet
- Reliability and Failure Modes of A Hybrid Ceramic Abutment PrototypeDocument5 pagesReliability and Failure Modes of A Hybrid Ceramic Abutment PrototypeAli FaridiNo ratings yet
- Call of Duty MG08/15 LMG Weapon WikiDocument1 pageCall of Duty MG08/15 LMG Weapon WikiSelin HNo ratings yet
- Gulf Harmony AW 46 Data SheetDocument1 pageGulf Harmony AW 46 Data SheetRezaNo ratings yet
- Resilience and Vulnerability: Complementary or Conflicting Concepts?Document25 pagesResilience and Vulnerability: Complementary or Conflicting Concepts?Shreyas SrivatsaNo ratings yet
- Kurnool - 30 NM - RWY 2000Document1 pageKurnool - 30 NM - RWY 2000aeeNo ratings yet
- UDRPDocument10 pagesUDRPDomainNameWire100% (1)
- Line Differential Protection and Control RED615: Product GuideDocument32 pagesLine Differential Protection and Control RED615: Product GuidebrahimNo ratings yet
- Tutorial DataGeosis Office EspañolmtdDocument205 pagesTutorial DataGeosis Office Españolmtdramm70No ratings yet
- Cisco Catalyst Switching Portfolio (Important)Document1 pageCisco Catalyst Switching Portfolio (Important)RoyalMohammadkhaniNo ratings yet
- Digital Vision Installation PDFDocument2 pagesDigital Vision Installation PDFnikola5nikolicNo ratings yet
- Chap4 Student VersionDocument39 pagesChap4 Student VersionAzrif MoskamNo ratings yet
- Stresses, Loads, and Factors of Safety in Structural ElementsDocument6 pagesStresses, Loads, and Factors of Safety in Structural ElementsMark Louies Mago VillarosaNo ratings yet
- Engineering Technical Report of The v12 Engine and Related Assignments at Tipco IncDocument36 pagesEngineering Technical Report of The v12 Engine and Related Assignments at Tipco Incapi-244817040No ratings yet
- 13.2EN Funds-Flow-Analysis Final V1-1 PDFDocument2 pages13.2EN Funds-Flow-Analysis Final V1-1 PDFvishnupriyaNo ratings yet
- Medonic M-Series M32 Innovation Built On Total Quality: For Today'S Hematology LabsDocument6 pagesMedonic M-Series M32 Innovation Built On Total Quality: For Today'S Hematology LabsSubhanullah JalalNo ratings yet
- Sap Abap Programming SyllabusDocument5 pagesSap Abap Programming SyllabusSURAJ KUMAR SAHUNo ratings yet
- DELL XPS 11 VAZ90 LA-A161P Rev 1.0 (A00) 20130814Document49 pagesDELL XPS 11 VAZ90 LA-A161P Rev 1.0 (A00) 20130814Sonel SmithNo ratings yet
- Track The 5 Most Important Call Center MetricsDocument3 pagesTrack The 5 Most Important Call Center Metricssalesforce.comNo ratings yet
- Enterprise, Innovation Creativity 2018-19 S3 CourseworkDocument7 pagesEnterprise, Innovation Creativity 2018-19 S3 CourseworkSajidNo ratings yet
- TM 1001 AVEVA Plant 12 1 PDMS Foundations Rev 3 0 PDFDocument153 pagesTM 1001 AVEVA Plant 12 1 PDMS Foundations Rev 3 0 PDFPolarogramaNo ratings yet
- Watershed & Four Water ConceptDocument31 pagesWatershed & Four Water ConceptNarendra SinghNo ratings yet
- Utility Classes - Installation Guide: Dalestech LTDDocument6 pagesUtility Classes - Installation Guide: Dalestech LTDbvitalNo ratings yet