You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Plant Management TafskillsDocument4 pagesPlant Management TafskillsTHEOPHILUS ATO FLETCHERNo ratings yet
- Gaps, Pro Versus NoviceDocument2 pagesGaps, Pro Versus Novicertkiyous2947No ratings yet
- Analysis of Methodologies For The Evaluation of Power Outage Costs PDFDocument5 pagesAnalysis of Methodologies For The Evaluation of Power Outage Costs PDFHachimenum AmadiNo ratings yet
- LabVIEW Core 3 2013 - Course ManualDocument135 pagesLabVIEW Core 3 2013 - Course Manualtalaindio100% (2)
- k90mcc6 PDFDocument381 pagesk90mcc6 PDFTammy JohnsonNo ratings yet
- Soal Dan Jawaban Audit IIDocument22 pagesSoal Dan Jawaban Audit IIsantaulinasitorusNo ratings yet
- Episode 1Document10 pagesEpisode 1ethel bacalso100% (1)
- Speech Recognition Using Reconstructed Phase Space FeaturesDocument4 pagesSpeech Recognition Using Reconstructed Phase Space FeaturesjehoshaNo ratings yet
- Towards Robust Speech Recognition For Human-Robot InteractionDocument6 pagesTowards Robust Speech Recognition For Human-Robot InteractionjehoshaNo ratings yet
- Spectral Subband Centroid Features For Speech RecognitionDocument4 pagesSpectral Subband Centroid Features For Speech RecognitionjehoshaNo ratings yet
- Grapheme Based Speech RecognitionDocument4 pagesGrapheme Based Speech RecognitionjehoshaNo ratings yet
- Auditory Image Model Features For Automatic Speech RecognitionDocument4 pagesAuditory Image Model Features For Automatic Speech RecognitionjehoshaNo ratings yet
- Automatic Speech Recognition: A ReviewDocument5 pagesAutomatic Speech Recognition: A ReviewjehoshaNo ratings yet
- Towards End-to-End Speech Recognition With Recurrent Neural NetworksDocument9 pagesTowards End-to-End Speech Recognition With Recurrent Neural NetworksjehoshaNo ratings yet
- Recent Advances in The Automatic Recognition of Audio-Visual SpeechDocument19 pagesRecent Advances in The Automatic Recognition of Audio-Visual SpeechjehoshaNo ratings yet
- Voiceless Speech Recognition Using Dynamic Visual Speech FeaturesDocument9 pagesVoiceless Speech Recognition Using Dynamic Visual Speech FeaturesjehoshaNo ratings yet
- Deep and Wide: Multiple Layers in Automatic Speech RecognitionDocument7 pagesDeep and Wide: Multiple Layers in Automatic Speech RecognitionjehoshaNo ratings yet
- Recognizing Words From Source Code Identifiers Using Speech Recognition TechniquesDocument10 pagesRecognizing Words From Source Code Identifiers Using Speech Recognition TechniquesjehoshaNo ratings yet
- Speech Recognition: Accelerating The Adoption of Electronic Medical RecordsDocument11 pagesSpeech Recognition: Accelerating The Adoption of Electronic Medical RecordsjehoshaNo ratings yet
- Dynamic Bayesian Networks For Audio-Visual Speech RecognitionDocument16 pagesDynamic Bayesian Networks For Audio-Visual Speech RecognitionjehoshaNo ratings yet
- Weighted Finite-State Transducers in Speech RecognitionDocument26 pagesWeighted Finite-State Transducers in Speech RecognitionjehoshaNo ratings yet
- Asr2000 Final FooterDocument8 pagesAsr2000 Final Footerقرين لطفيNo ratings yet
- Speech Recognition Techniques For A Sign Language Recognition SystemDocument4 pagesSpeech Recognition Techniques For A Sign Language Recognition SystemjehoshaNo ratings yet
- Posterior Features Applied To Speech Recognition Tasks With User-Defined VocabularyDocument4 pagesPosterior Features Applied To Speech Recognition Tasks With User-Defined VocabularyjehoshaNo ratings yet
- Speech Recognition by Machine: A ReviewDocument25 pagesSpeech Recognition by Machine: A ReviewjehoshaNo ratings yet
- An Investigation of Linguistic Information For Speech Recognition Error DetectionDocument155 pagesAn Investigation of Linguistic Information For Speech Recognition Error DetectionjehoshaNo ratings yet
- W Orking Papers in Speech RecognitionDocument83 pagesW Orking Papers in Speech RecognitionjehoshaNo ratings yet
- Large Margin Hidden Markov Models For Automatic Speech RecognitionDocument8 pagesLarge Margin Hidden Markov Models For Automatic Speech RecognitionjehoshaNo ratings yet
- Speech Recognition With Missing Data Using Recurrent Neural NetsDocument7 pagesSpeech Recognition With Missing Data Using Recurrent Neural NetsjehoshaNo ratings yet
- Asking Questions To Limited Domain Virtual Characters: How Good Does Speech Recognition Have To Be?Document8 pagesAsking Questions To Limited Domain Virtual Characters: How Good Does Speech Recognition Have To Be?jehoshaNo ratings yet
- An Efficient Speech Recognition SystemDocument7 pagesAn Efficient Speech Recognition SystemcseijNo ratings yet
- Speaker-Dependent Speech Recognition Based On Phone-Like Units Models - Application To Voice DialDocument4 pagesSpeaker-Dependent Speech Recognition Based On Phone-Like Units Models - Application To Voice DialjehoshaNo ratings yet
- A Tutorial On Hidden Markov Models and Selected Applications in Speech RecognitionDocument30 pagesA Tutorial On Hidden Markov Models and Selected Applications in Speech RecognitionRony Adhi NugrohoNo ratings yet
- Automatic Speech Recognition: Reliability and Pedagogical Implications For Teaching PronunciationDocument13 pagesAutomatic Speech Recognition: Reliability and Pedagogical Implications For Teaching PronunciationjehoshaNo ratings yet
- Large-Margin Feature Adaptation For Automatic Speech RecognitionDocument6 pagesLarge-Margin Feature Adaptation For Automatic Speech RecognitionjehoshaNo ratings yet
- White Paper - Demystifying Speech Recognition by Charles Corfield - July2012Document5 pagesWhite Paper - Demystifying Speech Recognition by Charles Corfield - July2012mahi271286No ratings yet
- Curriculum Vitae: Career ObjectiveDocument2 pagesCurriculum Vitae: Career ObjectiveNasir AhmedNo ratings yet
- Forging 2Document17 pagesForging 2Amin ShafanezhadNo ratings yet
- 04 Handout 1 (Midterms)Document14 pages04 Handout 1 (Midterms)Emmanuel DelarosaNo ratings yet
- Avimator Beginners GuideDocument13 pagesAvimator Beginners GuideluluzichaNo ratings yet
- EWBB TDD 3.0 DBS3900 Product Description 01 (20130107)Document24 pagesEWBB TDD 3.0 DBS3900 Product Description 01 (20130107)estebanarcaNo ratings yet
- CorpDocument14 pagesCorpIELTSNo ratings yet
- Bbit/Bptm: Busbar Insulating Tubing (5-35 KV)Document1 pageBbit/Bptm: Busbar Insulating Tubing (5-35 KV)Stephen BridgesNo ratings yet
- DLL Sci 10 12-09-2022Document3 pagesDLL Sci 10 12-09-2022Lovely Shiena Cain AragoncilloNo ratings yet
- ION 900 Series Owners ManualDocument24 pagesION 900 Series Owners ManualParosanu IonelNo ratings yet
- CV: LT Col MD Rakibul Hassan, Raqueeb HassanDocument14 pagesCV: LT Col MD Rakibul Hassan, Raqueeb HassanRakibul Hassan100% (26)
- TVS 1 PDFDocument24 pagesTVS 1 PDFPooja PreetiNo ratings yet
- MyFlixer - Watch Movies and Series Online Free in Full HD On MyFlixerDocument1 pageMyFlixer - Watch Movies and Series Online Free in Full HD On MyFlixerGeanina OlteanuNo ratings yet
- Casio Aq140w UputstvoDocument1 pageCasio Aq140w UputstvoalazovicNo ratings yet
- Ex Covid Shift ADocument1 pageEx Covid Shift ADetri Yoga AdhiNo ratings yet
- Java 9 Real - TimeDocument57 pagesJava 9 Real - TimeDiego AmayaNo ratings yet
- Hyperformance Plasma: Manual GasDocument272 pagesHyperformance Plasma: Manual GasSinan Aslan100% (1)
- Thesun 2009-07-09 Page05 Ex-Pka Director Sues Nine For rm11mDocument1 pageThesun 2009-07-09 Page05 Ex-Pka Director Sues Nine For rm11mImpulsive collectorNo ratings yet
- Oracle Flash Storage System CLI ReferenceDocument454 pagesOracle Flash Storage System CLI Referencebsduser07No ratings yet
- Lesson 2. WHAT IS AGROTECHNOPRENEURSHIPDocument23 pagesLesson 2. WHAT IS AGROTECHNOPRENEURSHIPRhea Jane DugadugaNo ratings yet
- Ti - e - Protegol 32-97 Jan 08Document3 pagesTi - e - Protegol 32-97 Jan 08A MahmoodNo ratings yet
- Garden Profile NDocument19 pagesGarden Profile NParitosh VermaNo ratings yet
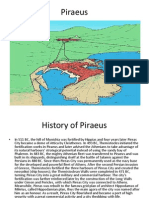
- PiraeusDocument9 pagesPiraeusBen JamesNo ratings yet
- Topic: Matrix Addition and SubtractionDocument6 pagesTopic: Matrix Addition and SubtractionAnonyNo ratings yet