You might also like
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)From EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)No ratings yet
- Seismic Response Spectra - A Tool For Seismic Design of StructuresDocument6 pagesSeismic Response Spectra - A Tool For Seismic Design of StructuresMUNICIPALIDAD SERREZUELANo ratings yet
- Emilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?Document5 pagesEmilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?AzmerzrNo ratings yet
- Chapter 3Document22 pagesChapter 3Pedro MiguelNo ratings yet
- Taylor Hypothesis and Large-Scale Coherent Structures: by K. B. M. Q. Zaman K. M. F. HussainDocument18 pagesTaylor Hypothesis and Large-Scale Coherent Structures: by K. B. M. Q. Zaman K. M. F. Hussainamir sadighiNo ratings yet
- A Three-Dimensional Backward Lagrangian Footprint Model For A Wide Range of Boundary-Layer StratificationsDocument22 pagesA Three-Dimensional Backward Lagrangian Footprint Model For A Wide Range of Boundary-Layer StratificationsNicolas BorgesNo ratings yet
- Seismo 1 ShearerDocument39 pagesSeismo 1 ShearerSerruchin 84No ratings yet
- Seiemic Velocity For Time MigrationDocument42 pagesSeiemic Velocity For Time MigrationTuan-Anh Xuan NghiemNo ratings yet
- Short-Term Earthquake Forecasting Using Early Aftershock StatisticsDocument16 pagesShort-Term Earthquake Forecasting Using Early Aftershock StatisticsAlvaro Trincado LizanaNo ratings yet
- Automated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanDocument5 pagesAutomated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanKrisna Hanjar PrastawaNo ratings yet
- 2015 - Waveform Tomography - Theory and Practice - PrattDocument4 pages2015 - Waveform Tomography - Theory and Practice - PrattJimmy Johan Tapia VásquezNo ratings yet
- Zhan Gji2013Document8 pagesZhan Gji2013serlyNo ratings yet
- Scale-Relativity and Quantization of Exoplanet Orbital Semi-Major AxesDocument9 pagesScale-Relativity and Quantization of Exoplanet Orbital Semi-Major AxesmnguyenNo ratings yet
- Basic Seismology-Shearer (USGS)Document61 pagesBasic Seismology-Shearer (USGS)jcpchin2No ratings yet
- Junlun 2009 Reservoir FocmecDocument28 pagesJunlun 2009 Reservoir Focmeconta ontaNo ratings yet
- Generation of Artificial Strong Motion: AccelerogramsDocument19 pagesGeneration of Artificial Strong Motion: AccelerogramsMarko AdamovićNo ratings yet
- 1975 Trifunac and GradyDocument46 pages1975 Trifunac and GradyNESTOR GEDEON BELLIDO AÑANCANo ratings yet
- Trifunac y Brandy 1 19Document19 pagesTrifunac y Brandy 1 19flaco perezNo ratings yet
- 1 s2.0 S0378437101001017 Main PDFDocument13 pages1 s2.0 S0378437101001017 Main PDFdocdocopenupNo ratings yet
- Tutorial On The Continuous and Discrete Adjoint State Method and Basic ImplementationDocument11 pagesTutorial On The Continuous and Discrete Adjoint State Method and Basic ImplementationKhánh DuyNo ratings yet
- Applications With Surface Waves Extracted From Ambient Seismic NoiseDocument21 pagesApplications With Surface Waves Extracted From Ambient Seismic NoiseJennifer WatsonNo ratings yet
- (Carcione, Et Al.) Seismic Modeling PDFDocument22 pages(Carcione, Et Al.) Seismic Modeling PDFOussama KhelilNo ratings yet
- Probabilistic Seismic Hazard Model of Inelastic Oscillator Based On Equivalent Linearization TechniqueDocument10 pagesProbabilistic Seismic Hazard Model of Inelastic Oscillator Based On Equivalent Linearization Techniquegorgika papandNo ratings yet
- Boore Stochastic Method Pageoph PDFDocument42 pagesBoore Stochastic Method Pageoph PDFPichi PaneroNo ratings yet
- Paper Dahlen For DummiesDocument13 pagesPaper Dahlen For DummiesRino TabiangNo ratings yet
- Adelfio Et Al. - 2012 - Simultaneous Seismic Wave Clustering and RegistrationDocument10 pagesAdelfio Et Al. - 2012 - Simultaneous Seismic Wave Clustering and RegistrationLucas Aguiar VitaNo ratings yet
- Thurber Eberhart PhillipsDocument10 pagesThurber Eberhart PhillipsRidwan KusnandarNo ratings yet
- This Content Downloaded From 143.107.252.171 On Thu, 08 Jul 2021 04:15:01 UTCDocument21 pagesThis Content Downloaded From 143.107.252.171 On Thu, 08 Jul 2021 04:15:01 UTCAna ScaletNo ratings yet
- Application of Seismic Tomography Techniques in Dam Site PDFDocument9 pagesApplication of Seismic Tomography Techniques in Dam Site PDFmasyon79No ratings yet
- 2 - Volumetric Dip and AzimuthDocument20 pages2 - Volumetric Dip and AzimuthSagnik Basu RoyNo ratings yet
- Time Domain Simulation of Jack-Up Dynamics Witli The Extremes of A Gaussian ProcessDocument5 pagesTime Domain Simulation of Jack-Up Dynamics Witli The Extremes of A Gaussian ProcessAndyNgoNo ratings yet
- Wavelets in Time Series Analysis: (Submitted)Document16 pagesWavelets in Time Series Analysis: (Submitted)fredsvNo ratings yet
- Faccioli Et Al 2004 DDBDDocument30 pagesFaccioli Et Al 2004 DDBDLobsang MatosNo ratings yet
- Jurnal StatistikDocument15 pagesJurnal Statistiksakurai hanaNo ratings yet
- Jayaram Et Al (2011) Japan Correlations, E&S PDFDocument26 pagesJayaram Et Al (2011) Japan Correlations, E&S PDFMohamed ElsayedNo ratings yet
- SPE 164417 Multi-Attribute Seismic Analysis Using Fractal Dimension and 2D & 3D Continuous Wavelet TransformDocument11 pagesSPE 164417 Multi-Attribute Seismic Analysis Using Fractal Dimension and 2D & 3D Continuous Wavelet Transformsindy larasatiNo ratings yet
- Nonlinear Time-Series Analysis: Ulrich ParlitzDocument31 pagesNonlinear Time-Series Analysis: Ulrich ParlitzFranklin Peña PoloNo ratings yet
- Geophys. J. Int.-1994-Ordaz-335-44Document10 pagesGeophys. J. Int.-1994-Ordaz-335-44Alex VCNo ratings yet
- Preliminary Analysis of The Scaling Exponents in Channel Ow TurbulenceDocument9 pagesPreliminary Analysis of The Scaling Exponents in Channel Ow TurbulencechrissbansNo ratings yet
- Wavelet Methods For Time Series AnalysisDocument45 pagesWavelet Methods For Time Series Analysisbogdan.oancea3651No ratings yet
- Carcione Et. Al. 2002 Seismic ModelingDocument22 pagesCarcione Et. Al. 2002 Seismic ModelingAirNo ratings yet
- Paper # - 3631Document10 pagesPaper # - 3631Rajesh RupakhetyNo ratings yet
- Zhang2011 Article APhaseModelOfEarthquakeMotionsDocument6 pagesZhang2011 Article APhaseModelOfEarthquakeMotionsHimaNshu VeRmaaNo ratings yet
- Geographic Statistics Petroleum Engineers: Conditional Simulation inDocument19 pagesGeographic Statistics Petroleum Engineers: Conditional Simulation inThanh ToanNo ratings yet
- The Statistical Distribution of The Maxima of A Random Function by Cartwright and Longuet HigginsDocument22 pagesThe Statistical Distribution of The Maxima of A Random Function by Cartwright and Longuet Higginsadaniliu13No ratings yet
- Why Ricker Wavelets Are Successful in Processing Seismic Data: Towards A Theoretical ExplanationDocument11 pagesWhy Ricker Wavelets Are Successful in Processing Seismic Data: Towards A Theoretical ExplanationLance ClementeNo ratings yet
- The October 1980 El-Asnam Earthquake in N.W. Algeria Modelling Incoherence of Ground MotionDocument11 pagesThe October 1980 El-Asnam Earthquake in N.W. Algeria Modelling Incoherence of Ground MotionSebastian Contreras ContrerasNo ratings yet
- Wavelet Estimation MVDBDocument13 pagesWavelet Estimation MVDBdig_itNo ratings yet
- Influence of Nonlinear Viscous Dampers On The Probabilistic Seismic Response of Linear StructuresDocument12 pagesInfluence of Nonlinear Viscous Dampers On The Probabilistic Seismic Response of Linear StructuresFRANCISCONo ratings yet
- SBGF 3240Document6 pagesSBGF 3240Nonato Colares ColaresNo ratings yet
- Auto Detection of P and S WaveDocument19 pagesAuto Detection of P and S WaveZeeshan ShafiqNo ratings yet
- Three Dimensional Flow Structures and Evolution of The Leading Edge Vortices On A Flapping WingDocument10 pagesThree Dimensional Flow Structures and Evolution of The Leading Edge Vortices On A Flapping WingAlfredo Chavez LunaNo ratings yet
- Introduction. Configuration Space. Equations of Motion. Velocity Phase SpaceDocument11 pagesIntroduction. Configuration Space. Equations of Motion. Velocity Phase SpaceArjun Kumar SinghNo ratings yet
- Dieter Weichert: Bulletin of The Seismological Society of America, Vol. 70, No. 4, Pp. 1337-1346, August 1980Document10 pagesDieter Weichert: Bulletin of The Seismological Society of America, Vol. 70, No. 4, Pp. 1337-1346, August 1980upasana9No ratings yet
- Department of Mechanical Engineering Michigan State University East Lansing, MI 48824 USADocument20 pagesDepartment of Mechanical Engineering Michigan State University East Lansing, MI 48824 USARahul BamaniaNo ratings yet
- Introduction To Field The+-1Document9 pagesIntroduction To Field The+-1Chief ArisaNo ratings yet
- Earthquake Source Parameters of Moderately Earthquake in The South Eastern Iran Based On Teleseismic and Regional DistancesDocument8 pagesEarthquake Source Parameters of Moderately Earthquake in The South Eastern Iran Based On Teleseismic and Regional DistancesNirav AcharyaNo ratings yet
- Earthquake Engineering Example Test QuestionsDocument4 pagesEarthquake Engineering Example Test QuestionsAnonymous pD2ymRUgu100% (1)
- Providing Ubiquitous Communication Using: Road-Side Units in VANET Systems: Unveiling The ChallengesDocument6 pagesProviding Ubiquitous Communication Using: Road-Side Units in VANET Systems: Unveiling The ChallengesmfhfhfNo ratings yet
- Pits Ill Ides 2007Document22 pagesPits Ill Ides 2007mfhfhfNo ratings yet
- Transportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceiverDocument6 pagesTransportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceivermfhfhfNo ratings yet
- Response of The Sorghum Bicolor Crop To The Addition of Potassium and Nitrogen FertilizerDocument8 pagesResponse of The Sorghum Bicolor Crop To The Addition of Potassium and Nitrogen FertilizermfhfhfNo ratings yet
- Computing in Applied Science: William J. ThompsonDocument11 pagesComputing in Applied Science: William J. ThompsonmfhfhfNo ratings yet
- 10.18081/MJAS/2019-7/184-192: AbstractDocument9 pages10.18081/MJAS/2019-7/184-192: AbstractmfhfhfNo ratings yet
- A Qos-Based Scheduling Algorithm in Vanets: Mohammad Shahverdy, Maryam Asgari, Mahmood FathyDocument10 pagesA Qos-Based Scheduling Algorithm in Vanets: Mohammad Shahverdy, Maryam Asgari, Mahmood FathymfhfhfNo ratings yet
- Chromium (III) Ion Selective Electrode Based On Glyoxal Bis (2-Hydroxyanil)Document7 pagesChromium (III) Ion Selective Electrode Based On Glyoxal Bis (2-Hydroxyanil)mfhfhfNo ratings yet
- 1737 RRR 28Document7 pages1737 RRR 28mfhfhfNo ratings yet
- Pani Snwaso4Document14 pagesPani Snwaso4mfhfhfNo ratings yet
- Journal of Advanced Research: Cairo UniversityDocument10 pagesJournal of Advanced Research: Cairo UniversitymfhfhfNo ratings yet
- Spectrophotometric Determination of Ascorbic Acid and Dehydroascorbic AcidDocument5 pagesSpectrophotometric Determination of Ascorbic Acid and Dehydroascorbic AcidmfhfhfNo ratings yet
- A Mercury (II) Ion-Selective Electrode Based On Neutral Salicylaldehyde ThiosemicarbazoneDocument5 pagesA Mercury (II) Ion-Selective Electrode Based On Neutral Salicylaldehyde ThiosemicarbazonemfhfhfNo ratings yet
- 1 s2.0 S2090123211000348 MainDocument9 pages1 s2.0 S2090123211000348 MainmfhfhfNo ratings yet
- Between Affect and Cognition: Proving at University LevelDocument8 pagesBetween Affect and Cognition: Proving at University LevelmfhfhfNo ratings yet
- Sureepong Phothongsunan Full PaperDocument13 pagesSureepong Phothongsunan Full PapermfhfhfNo ratings yet
- Application of Ionic Liquid To The Construction of Cu (II) Ion-Selective Electrode With Solid ContactDocument4 pagesApplication of Ionic Liquid To The Construction of Cu (II) Ion-Selective Electrode With Solid ContactmfhfhfNo ratings yet
- A New Ion Selective Electrode Method For Determination of Oseltamivir Phosphate (Tami U) and Its Pharmaceutical ApplicationsDocument8 pagesA New Ion Selective Electrode Method For Determination of Oseltamivir Phosphate (Tami U) and Its Pharmaceutical ApplicationsmfhfhfNo ratings yet
- McDowell James MPDocument50 pagesMcDowell James MPmfhfhfNo ratings yet
- A Comparison of Attribution Style, Perceived Stress and Difficulties in Emotion Regulation Between Single-Parent and Two-Parent AdolescentsDocument4 pagesA Comparison of Attribution Style, Perceived Stress and Difficulties in Emotion Regulation Between Single-Parent and Two-Parent AdolescentsmfhfhfNo ratings yet
- 548 Ab 0 Eb 0 CF 2 D 1800 D 7 Abc 1 DDocument11 pages548 Ab 0 Eb 0 CF 2 D 1800 D 7 Abc 1 DmfhfhfNo ratings yet
- Pub CauseDocument17 pagesPub CausemfhfhfNo ratings yet
- Effects of Reward-Schedule Parameters and Attribution Retraining On Children's Attributions and Reading PersistenceDocument5 pagesEffects of Reward-Schedule Parameters and Attribution Retraining On Children's Attributions and Reading PersistencemfhfhfNo ratings yet
- Mothers' Causal Attributions Concerning The Reading Achievement of Their Children With and Without Familial Risk For DyslexiaDocument12 pagesMothers' Causal Attributions Concerning The Reading Achievement of Their Children With and Without Familial Risk For DyslexiamfhfhfNo ratings yet
- Noth PicturesDocument17 pagesNoth PicturesJana AssaNo ratings yet
- Kat-A 4102 Rotovalve Edition3!12!02-2013 enDocument4 pagesKat-A 4102 Rotovalve Edition3!12!02-2013 enWalter PiracocaNo ratings yet
- Second Periodical Test in Organization and Management SY 2018-2019Document3 pagesSecond Periodical Test in Organization and Management SY 2018-2019Merida BravoNo ratings yet
- Progressive Muscle Relaxation ExerciseDocument2 pagesProgressive Muscle Relaxation Exerciseraghu2362704100% (1)
- Schmidt Hammer TestDocument5 pagesSchmidt Hammer Testchrtrom100% (1)
- Concept of Lokmitra Kendra in Himachal PradeshDocument2 pagesConcept of Lokmitra Kendra in Himachal PradeshSureshSharmaNo ratings yet
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalDocument4 pagesManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHNo ratings yet
- Lesson Exemplar Math 7Document6 pagesLesson Exemplar Math 7Pablo Jimenea100% (2)
- Calculation ReportDocument157 pagesCalculation Reportisaacjoe77100% (3)
- Davis A. Acclimating Pacific White Shrimp, Litopenaeus Vannamei, To Inland, Low-Salinity WatersDocument8 pagesDavis A. Acclimating Pacific White Shrimp, Litopenaeus Vannamei, To Inland, Low-Salinity WatersAngeloNo ratings yet
- Ship Recognition Manual TOSDocument138 pagesShip Recognition Manual TOSCody Lees94% (17)
- Changing Sentences in The Simple Present Tense Into PassiveDocument4 pagesChanging Sentences in The Simple Present Tense Into PassiveBernadette NarteNo ratings yet
- Romano Uts Paragraph Writing (Sorry For The Late)Document7 pagesRomano Uts Paragraph Writing (Sorry For The Late)ទី ទីNo ratings yet
- 2018-2019 Annual Algebra Course 1 Contest: InstructionsDocument2 pages2018-2019 Annual Algebra Course 1 Contest: InstructionsNaresh100% (1)
- PH-01 (KD 3.1) Filling Out Forms (PG20) - GFormDocument4 pagesPH-01 (KD 3.1) Filling Out Forms (PG20) - GFormLahita AzizahNo ratings yet
- Most Dangerous City - Mainstreet/Postmedia PollDocument35 pagesMost Dangerous City - Mainstreet/Postmedia PollTessa VanderhartNo ratings yet
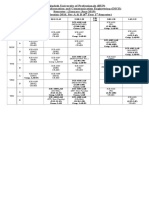
- Class Routine Final 13.12.18Document7 pagesClass Routine Final 13.12.18RakibNo ratings yet
- Unit 13 Dialogue Writing: ObjectivesDocument8 pagesUnit 13 Dialogue Writing: ObjectivesAkg GuptNo ratings yet
- E Voucher Hotel en 1241564309Document2 pagesE Voucher Hotel en 1241564309taufksNo ratings yet
- Practice Test - Math As A Language - MATHEMATICS IN THE MODERN WORLDDocument8 pagesPractice Test - Math As A Language - MATHEMATICS IN THE MODERN WORLDMarc Stanley YaoNo ratings yet
- Make Yeast StarterDocument2 pagesMake Yeast StarterAlexandraNo ratings yet
- Career Orientation QuestionnaireDocument5 pagesCareer Orientation QuestionnaireApple May100% (1)
- GATE Chemical Engineering 2015Document18 pagesGATE Chemical Engineering 2015Sabareesh Chandra ShekarNo ratings yet
- Kunst 1600 Case AnalysisDocument3 pagesKunst 1600 Case AnalysisrakeshNo ratings yet
- Nissan Note E-Power 2022 Quick Guide ENDocument57 pagesNissan Note E-Power 2022 Quick Guide ENSarita EmmanuelNo ratings yet
- FPGA Implementation For Humidity and Temperature Remote Sensing SystemDocument5 pagesFPGA Implementation For Humidity and Temperature Remote Sensing SystemteekamNo ratings yet
- Philips HD 9 User ManualDocument3 pagesPhilips HD 9 User ManualNdangoh DerekNo ratings yet
- Sop GC6890 MS5973Document11 pagesSop GC6890 MS5973Felipe AndrinoNo ratings yet
- 22 Thành NG Quen Thu C Trên Ielts - FirefighterDocument2 pages22 Thành NG Quen Thu C Trên Ielts - FirefighterNinh NguyễnNo ratings yet
- Cimo Guide 2014 en I 3Document36 pagesCimo Guide 2014 en I 3lakisNo ratings yet
- Stoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionFrom EverandStoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionRating: 5 out of 5 stars5/5 (51)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingFrom EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (149)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisFrom EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (30)
- Follow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.From EverandFollow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.No ratings yet
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerFrom EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerRating: 4.5 out of 5 stars4.5/5 (56)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisFrom EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (15)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipFrom EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipRating: 4.5 out of 5 stars4.5/5 (1135)
- Learn Spanish While SleepingFrom EverandLearn Spanish While SleepingRating: 4 out of 5 stars4/5 (20)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisFrom EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (22)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisFrom EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (2)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingFrom EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (497)
- The Story of the World, Vol. 1 AudiobookFrom EverandThe Story of the World, Vol. 1 AudiobookRating: 4.5 out of 5 stars4.5/5 (3)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageFrom EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageRating: 5 out of 5 stars5/5 (73)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningFrom EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningRating: 4.5 out of 5 stars4.5/5 (55)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisFrom EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (3)
- Summary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedFrom EverandSummary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedRating: 5 out of 5 stars5/5 (2)
- Cynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyFrom EverandCynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyRating: 4.5 out of 5 stars4.5/5 (221)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisFrom EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (6)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4.5 out of 5 stars4.5/5 (1875)
- Learn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25From EverandLearn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25Rating: 5 out of 5 stars5/5 (17)
- Rooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareFrom EverandRooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareNo ratings yet
- You Are Not Special: And Other EncouragementsFrom EverandYou Are Not Special: And Other EncouragementsRating: 4.5 out of 5 stars4.5/5 (6)
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveFrom EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveRating: 5 out of 5 stars5/5 (1)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveFrom EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveRating: 4 out of 5 stars4/5 (25)