You might also like
- Movie Theater Building DesignDocument16 pagesMovie Theater Building DesignPrathamesh NaikNo ratings yet
- Labor Economics ManualDocument97 pagesLabor Economics ManualLam Wai Kuen100% (3)
- Ostrom 2009Document5 pagesOstrom 2009Cristian Fernando MenchiNo ratings yet
- Elinor Ostrom - A General Framework For Analyzing Sustainability of Social Ecological SystemsDocument5 pagesElinor Ostrom - A General Framework For Analyzing Sustainability of Social Ecological SystemsCentro de Investigaciones Patafísicas de México100% (1)
- 2PA CdSe-ZnSDocument4 pages2PA CdSe-ZnSlabasvisogeroNo ratings yet
- 1662 (2010) Dongeun Huh: Science, Et AlDocument8 pages1662 (2010) Dongeun Huh: Science, Et AlShyamsundar MuthuramalingamNo ratings yet
- Gavrilets Et Al. - Adaptive Radiation - 2009Document7 pagesGavrilets Et Al. - Adaptive Radiation - 2009Cristián Orlando Prado BallesterNo ratings yet
- 79 (2012) Rajendhran Rajakumar: Science, Et AlDocument5 pages79 (2012) Rajendhran Rajakumar: Science, Et AlkypppuNo ratings yet
- Guia para Modelar EcosistemasDocument13 pagesGuia para Modelar EcosistemasOscar GiovanniNo ratings yet
- BindingDocument6 pagesBindingalgorithm123No ratings yet
- Meredith Et Al. 2011. Mammal Family Level Phylogeny. ScienceDocument5 pagesMeredith Et Al. 2011. Mammal Family Level Phylogeny. ScienceLinethVelasquezNo ratings yet
- 2 The - Habitat - Template - of - Phytoplankton - Morphology-B PDFDocument13 pages2 The - Habitat - Template - of - Phytoplankton - Morphology-B PDFPaola JaraNo ratings yet
- 2 The - Habitat - Template - of - Phytoplankton - Morphology-B PDFDocument13 pages2 The - Habitat - Template - of - Phytoplankton - Morphology-B PDFPaola JaraNo ratings yet
- SADDocument19 pagesSADadelabarrera10No ratings yet
- Tugas Terstruktur 2 - BioDas IIDocument9 pagesTugas Terstruktur 2 - BioDas IIFiy Jannatin AliyahNo ratings yet
- Bio Physical Effects of Radiofrequency Electromagnetic - 2019 - Journal of KingDocument9 pagesBio Physical Effects of Radiofrequency Electromagnetic - 2019 - Journal of Kingloeta6No ratings yet
- RSPB 20101734Document8 pagesRSPB 20101734Lucía SolerNo ratings yet
- PHoto ImagingDocument3 pagesPHoto Imagingnikhil kumarNo ratings yet
- Group#6 FractalsDocument3 pagesGroup#6 FractalsmanuelflorencioNo ratings yet
- A Statistical Explanation of MaxEnt For Ecologists - Elith - 2010 - Diversity and DistributionsDocument15 pagesA Statistical Explanation of MaxEnt For Ecologists - Elith - 2010 - Diversity and DistributionsFlávia Renata SoaresNo ratings yet
- Miller - 2016 - Biotechnol BioengDocument15 pagesMiller - 2016 - Biotechnol Bioengaaron Saint-Pierre jonesNo ratings yet
- SOFT ROBOTICS. A 3d-Printed, Functionally Graded Soft Robot Powered by CombustionDocument16 pagesSOFT ROBOTICS. A 3d-Printed, Functionally Graded Soft Robot Powered by CombustionMonark HunyNo ratings yet
- DiversityDocument4 pagesDiversityFernando BiscioneNo ratings yet
- tmpD355 TMPDocument30 pagestmpD355 TMPFrontiersNo ratings yet
- Wu Canopy Phenology Photosythesis Seasonality Amazonia 2016Document6 pagesWu Canopy Phenology Photosythesis Seasonality Amazonia 2016Lucas BauerNo ratings yet
- 2020 Saproxylic Cetoniidae Coleoptera SCDocument8 pages2020 Saproxylic Cetoniidae Coleoptera SCJuan José Sánchez MecaNo ratings yet
- Science 2006 Cottrell 454 5Document3 pagesScience 2006 Cottrell 454 5Randall LinNo ratings yet
- Radionics Radiestesia and Physics DR William A TillerDocument24 pagesRadionics Radiestesia and Physics DR William A TillerRicardo GuimarãesNo ratings yet
- American Association For The Advancement of ScienceDocument5 pagesAmerican Association For The Advancement of ScienceNamu PatelNo ratings yet
- PDE Modeling of Tissue Engineering and Regenerative Medicine: Computer Analysis in RFrom EverandPDE Modeling of Tissue Engineering and Regenerative Medicine: Computer Analysis in RNo ratings yet
- Alex Córdoba-Aguilar (Ed) : Dragon Ies and Damsel Ies. Model Organisms For Ecological and Evolutionary ResearchDocument4 pagesAlex Córdoba-Aguilar (Ed) : Dragon Ies and Damsel Ies. Model Organisms For Ecological and Evolutionary Researchingrede thalyaNo ratings yet
- Brain StructureDocument69 pagesBrain StructureRexNo ratings yet
- A Single Changing Hypernetwork To Represent SocialDocument17 pagesA Single Changing Hypernetwork To Represent Socialrct.jhsdeptNo ratings yet
- Phaeodactylum Tricornutum: Genome Properties of The DiatomDocument10 pagesPhaeodactylum Tricornutum: Genome Properties of The DiatommbrancovNo ratings yet
- Ecological Networks in The TropicsDocument207 pagesEcological Networks in The TropicsIngrid Tatiana100% (1)
- Molluscan Studies: Journal ofDocument19 pagesMolluscan Studies: Journal ofWidi SetyogatiNo ratings yet
- Task GilbertDocument3 pagesTask Gilbertapi-3773589No ratings yet
- Visualizing Individual Nitrogen Dopants in Monolayer GrapheneDocument6 pagesVisualizing Individual Nitrogen Dopants in Monolayer Graphene김영찬No ratings yet
- ESS Systems QuestionsDocument12 pagesESS Systems QuestionsEerika RsNo ratings yet
- ESS Systems QuestionsDocument12 pagesESS Systems QuestionsEerika RsNo ratings yet
- #01583 KolbeEtal 2012Document5 pages#01583 KolbeEtal 2012cretinusmaximusNo ratings yet
- Genetic Optimization Techniques for Sizing and Management of Modern Power SystemsFrom EverandGenetic Optimization Techniques for Sizing and Management of Modern Power SystemsNo ratings yet
- University of Bristol - Explore Bristol ResearchDocument26 pagesUniversity of Bristol - Explore Bristol ResearchRobert SmagalaNo ratings yet
- Lab For LectureDocument6 pagesLab For LectureChristian AndradeNo ratings yet
- Photosymbiotic Giant Clams Are Transformers of Solar FluxDocument14 pagesPhotosymbiotic Giant Clams Are Transformers of Solar FluxAnonymous 6OPLC9UNo ratings yet
- Artigo de ImunoDocument8 pagesArtigo de ImunoEverlyn Batista Gregório LimaNo ratings yet
- Inventar Memoria en El HipocampusDocument5 pagesInventar Memoria en El HipocampuscorazondelatorNo ratings yet
- tmpC531 TMPDocument15 pagestmpC531 TMPFrontiersNo ratings yet
- Unitplanbio 10Document8 pagesUnitplanbio 10api-297068612No ratings yet
- Can Nanotechnology Help To Repair The BodyDocument27 pagesCan Nanotechnology Help To Repair The BodyPaulo Henrique MuzekaNo ratings yet
- Journal of Avian Biology - 2017 - Engler - Avian SDMs Current State Challenges and OpportunitiesDocument22 pagesJournal of Avian Biology - 2017 - Engler - Avian SDMs Current State Challenges and OpportunitiesThazin HtayNo ratings yet
- Long-Distance Dispersal Research: Building A Network of Yellow Brick RoadsDocument6 pagesLong-Distance Dispersal Research: Building A Network of Yellow Brick RoadsrihbiNo ratings yet
- Expanding The Fluorine Chemistry of Living Systems Using Engineered Polyketide Synthase PathwaysDocument7 pagesExpanding The Fluorine Chemistry of Living Systems Using Engineered Polyketide Synthase PathwaysJunia Alfa NessaNo ratings yet
- Tsien BPhy2009Document5 pagesTsien BPhy2009Brent WaltonNo ratings yet
- Oso PolarDocument5 pagesOso PolarGiovanni Ávila EsquivelNo ratings yet
- Huh 2010Document8 pagesHuh 2010Ajanth PraveenNo ratings yet
- Bio Sci 1988 New Computer ModelsDocument12 pagesBio Sci 1988 New Computer ModelsCJ EtneicapNo ratings yet
- Tetrahymena Thermophila: A Divergent Perspective On Membrane TrafficDocument17 pagesTetrahymena Thermophila: A Divergent Perspective On Membrane TrafficChurch TuringNo ratings yet
- Diaz Et Al - 2013 - EcolEvol - Functional Traits and VulnerabilityDocument24 pagesDiaz Et Al - 2013 - EcolEvol - Functional Traits and VulnerabilityLucía SolerNo ratings yet
- TCBG Highlights 2012Document12 pagesTCBG Highlights 2012tcbguiucNo ratings yet
- 1635 (2005) Paul B. Eckburg: Science Et AlDocument5 pages1635 (2005) Paul B. Eckburg: Science Et AlArizha IrmaNo ratings yet
- Extremophiles For Microbial-Electrochemistry ApplicationsDocument49 pagesExtremophiles For Microbial-Electrochemistry Applicationssudhu sudsNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Fluid Mechanics Practice Questions With SolutionDocument17 pagesFluid Mechanics Practice Questions With SolutionwebvenkyNo ratings yet
- Mathematical SymbolsDocument5 pagesMathematical SymbolsJohn TingNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- First Joint M Med OGMRCOG Part 2 Oral Assessment EDocument5 pagesFirst Joint M Med OGMRCOG Part 2 Oral Assessment EwebvenkyNo ratings yet
- Choose A Plan - ScribdDocument2 pagesChoose A Plan - ScribdwebvenkyNo ratings yet
- ME3112 Mechanics of Machines Solution To Problem Set 5Document4 pagesME3112 Mechanics of Machines Solution To Problem Set 5webvenkyNo ratings yet
- VisionRobo BrochureDocument9 pagesVisionRobo BrochurewebvenkyNo ratings yet
- Game TheoryDocument21 pagesGame TheoryJoan Albet SerraNo ratings yet
- Timetable For NUS ECE Gradute ModulesDocument2 pagesTimetable For NUS ECE Gradute ModuleswebvenkyNo ratings yet
- Unix TutorialDocument47 pagesUnix Tutorialapi-3708359No ratings yet
- RmiquestionpaperDocument3 pagesRmiquestionpaperwebvenkyNo ratings yet
- AsthmaDocument8 pagesAsthmawebvenkyNo ratings yet
- Lauffer Broschuere LCL AnsichtDocument4 pagesLauffer Broschuere LCL AnsichtRaul CostiniucNo ratings yet
- Thermal KPN PDFDocument160 pagesThermal KPN PDFRithish BarathNo ratings yet
- Module 17 Asteroids PDFDocument25 pagesModule 17 Asteroids PDFJohn Van Dave Taturo100% (1)
- Idsl 830 Transformative Change Capstone ProjectDocument33 pagesIdsl 830 Transformative Change Capstone Projectapi-282118034No ratings yet
- RESUMEEE JurnalDocument6 pagesRESUMEEE JurnalnaufalarifnurrohmanNo ratings yet
- Quantum Field Theory A Cyclist Tour: Predrag Cvitanovi CDocument48 pagesQuantum Field Theory A Cyclist Tour: Predrag Cvitanovi COliver BardinNo ratings yet
- Six Models of OrganizationDocument5 pagesSix Models of Organizationmh_sadri100% (1)
- (YDM) Ambo University Phy ExamDocument8 pages(YDM) Ambo University Phy ExamYdm DmaNo ratings yet
- Akshatha KDocument2 pagesAkshatha KAkshata HullattiNo ratings yet
- Paraphrasing ExercisesDocument4 pagesParaphrasing ExercisesPaulinaNo ratings yet
- Kings' Montessori School: Guidelines in Administering / Taking Examinations Before ExaminationsDocument4 pagesKings' Montessori School: Guidelines in Administering / Taking Examinations Before ExaminationsLar BataldoNo ratings yet
- 9990 Y18-20 Sy PDFDocument40 pages9990 Y18-20 Sy PDFmashalNo ratings yet
- FLC - Problems - Solutions PDFDocument231 pagesFLC - Problems - Solutions PDFneha_gupta_91No ratings yet
- Volt White DocumentationDocument2 pagesVolt White DocumentationSantiago Rodriguez ArenasNo ratings yet
- The Body and The ArchiveDocument63 pagesThe Body and The ArchiveSwami SilvaNo ratings yet
- How To Live To Be 200Document3 pagesHow To Live To Be 200Anonymous 117cflkW9W100% (2)
- Art EducationDocument13 pagesArt EducationJaime MorrisNo ratings yet
- General Awareness Questions Asked CGL17 - 10 PDFDocument13 pagesGeneral Awareness Questions Asked CGL17 - 10 PDFKishorMehtaNo ratings yet
- 6 Feministic - Approach To AwoodDocument6 pages6 Feministic - Approach To AwoodbibaNo ratings yet
- Colegio Tecnico Profesional Santo DomingoDocument3 pagesColegio Tecnico Profesional Santo DomingoStaling BFloresNo ratings yet
- Recovering The Essence in Language - EssayDocument3 pagesRecovering The Essence in Language - EssayOnel1No ratings yet
- ActuatorsDocument20 pagesActuatorsmohamedbadawyNo ratings yet
- Bit Sub and Float ChartDocument16 pagesBit Sub and Float ChartRobert KilgoreNo ratings yet
- Nota Avant GardeDocument5 pagesNota Avant GardePeisan GohNo ratings yet
- 4.9 The Joukowski Mapping: Circles To EllipsesDocument12 pages4.9 The Joukowski Mapping: Circles To EllipsesPerita CromagnoliNo ratings yet
- Funda 2 Online Backup Data File - 12 MayDocument4 pagesFunda 2 Online Backup Data File - 12 Mayapi-3745527No ratings yet
- U KH51 Kubota D950-BH (1987-1991)Document3 pagesU KH51 Kubota D950-BH (1987-1991)Joe StadlerNo ratings yet
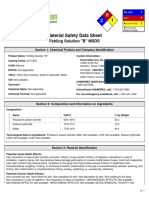
- Fehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationDocument6 pagesFehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationAnnisaNo ratings yet