Professional Documents
Culture Documents
Relatório Projecto Controlo de Voo
Uploaded by
David BrandãoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Relatório Projecto Controlo de Voo
Uploaded by
David BrandãoCopyright:
Available Formats
Controlo
de voo
Aterragem em London City
Modo lateral: Controlo de ngulo de
rolamento e de derrapagem
Docente:
Jos
Azinheira
MEAer
2012/2013
Alunos:
N
69755
Bruno
Albuquerque
N
70230
David
Brando
1
Indice
Pg.
Resumo............................................
2
Introduo.......................................
2
Determinao
e
Anlise
do
modelo
3
Aumento
de
Estabilidade................
3
Controlo
de
Atitude........................
4
Sensores
e
Actuadores....................
5
Simulao
do
percurso....................
6
Concluso.........................................
9
Anexos..............................................
9
Circuito
Controlo
de
Atitude
Circuito
Sensores
Circuito
InvSensores
Circuito
Actuadores
Circuito
GPS
Circuito
Final
Cdigo
1. Resumo
Este
trabalho
consiste
na
implementao
de
um
sistema
de
controlo
lateral
da
aeronave
Beechcraft
350
com
o
objectivo
de
automatizar
a
aproximao
desta
ao
aeroporto
de
London
City
(LCY)
a
nvel
lateral.
Para
conseguir
alcanar
o
objectivo
foi
necessrio
primeiramente
estabilizar
a
aeronave
e
atribuir-lhe
certas
caractersticas
conforme
pedido
no
enunciado.
Para
finalizar
este
breve
resumo
julga-se
necessrio
indicar
que
para
a
modelao,
implementao
e
obteno
de
resultados
foi
usado
o
software
SciLab
e
a
sua
extenso
Xcos.
2. Introduo
A
cadeira
de
Controlo
de
Voo
surge
com
o
objectivo
de
aplicao
dos
conhecimentos
adquiridos
em
Estabilidade
de
Voo
e
Introduo
ao
Controlo.
Desta
forma
e
aps
a
apresentao
dos
conceitos
tericos
da
unidade
curricular
surge
a
hiptese
de
aplicao
dos
conhecimentos
adquiridos
num
projeto
de
controlador
areo.
Assim,
partindo
da
necessidade
da
aplicao
prtica
dos
conhecimentos
e
da
necessidade
de
uma
aproximao
a
ferramentas
de
sntese
deste
tipo
de
projetos
optou-se
por
um
projeto
de
controlo
Lateral
usando
um
software
opensource
de
computao
numrica
de
nome
SciLab
e
a
sua
extenso
que
permite
a
simulao
de
modelos
electrnicos
com
base
no
cdigo
do
SciLab
chamado
Xcos.
A
aeronave
escolhida
um
Beechcraft350
em
fase
de
voo
4
(o
que
corresponde
a
fase
de
aterragem,
portanto
Fase
C),
um
turboprop
executivo
de
8
passageiros
mais
2
elementos
da
tripulao,
alcnce
mdio
de
1440
nm
e
velocidade
de
cruzeiro
mxima
de
320
kts.
Agora
que
foi
enquadrado
o
projeto
podero
ser
enumeradas
e
descritas
sucintamente
as
fases
do
projeto:
1. Estabilizao
do
modelo
e
incluso
nos
nveis
e
caractersticas
pretendidas
(Voo
em
Fase
C
e
aeronave
de
Classe
II
peso
inferior
a
30000
kg)
.
Para
cada
modo
de
movimento
lateral
so
em
seguida
explicitados
os
objectivos
a
atingir:
1.1-
Rolamento
Holands
em
Nvel
1
e
com
0,6;
1.2-
Modo
espiral
em
Nvel
1,
o
que
implica
um
T2
12s;
1.3-
Rolamento
em
Nvel
1
que
implica
um
T
<
1.4s.
2
2. Controlo de Atitude. Pretende-se efetuar
o controlo dos ngulos de derrapagem e
rolamento.
3. Modelao
em
Xcos
dos
sensores/Actuadores com respectivas
caracteristicas;
4. Controlo de trajetria: definio das
estratgias a implementar para assegurar
o seguimento da trajetria pretendida.
Por fim foi necessrio simular o percurso de
aproximao pista e verificar se as
caractersticas estavam de acordo com as
pretendidas.
constante de tempo T=1.223 s, inferior a 1.4 s,
o que permite que seja includa no Nvel 1 tal
como pretendido. A terceira linha o modo de
espiral que instvel o que comum e tem um
T2 maior que os 12s exigidos para ser includo
no Nvel 1. A quarta e quinta linha so
referentes ao rolamento holands que apesar
de ser estvel e ter maior frequncia natural do
que a exigida no tem o amortecimento
necessrio para ser includo no nivel 1, nem
para cumprir o requisito 0,6.
4. Aumento
de
Establidade
4.1.Controlo
Clssico
3. Determinao
e
anlise
do
modelo
estudado
Esta
parte
do
projeto
iniciou-se
com
a
definio
das
matrizes
do
movimento
lateral.
As
matrizes
A
e
B
so
definidas
por:
Da
substituio
dos
parmetros
fornecidos
no
enunciado
tem-se
imediatamente:
Por forma a atingir os requisitos, aplicou-se
primeiramente uma realimentao da razo de
guinada, r, no rudder, dr. Facilmente se conclui
que esta realimentao, correspondente a um
yaw damper simples, no eficaz na colocao
do rolamento holands nas caractersticas
desejadas, conforme se pode verificar no LGR
abaixo: as curvas correspondentes ao
Rolamento Holands no atingem a recta
0,6 para nenhum valor de K.
Utilizando a funo spec e damp do SciLab,
juntamente com algum cdigo adicional para
identificao de T, T2 e o produto da frequncia
natural pelo coeficiente de amortecimento
obtm-se as seguinte caractersticas:
A primeira linha referente a um estado extra
para o phi e no est diretamente em anlise.
A segunda linha refere-se ao modo de
rolamento que est estvel e tem uma
Ybb Yp + W 0 / U 0 Yr 1
Lbb
Lp
Lr
A = Nbb
Np
Nr
1
tan( 0)
0
0
0
sec( 0)
g cos( 0) / U 0 0
0
0
0
0 ;
0
0
0
0
Ydr / U 0
0
Lda
Ldr
B = Nda
Nda
0
0
0
0
Por
fim
tentou-se
a
realimentao
da
razo
de
guinada
e
de
rolamento,
porm
com
a
anlise
de
RootLocus
para
vrias
relaes
de
de
verificmos
que
a
estabilizao
deste
sistema
em
controlo
clssico
no
satisfatria,
j
que
no
se
conseguem
atingir
os
requisitos
para
o
rolamento
holands
sem
que
os
modos
de
rolamento
e
espiral
degenerem
(ver
diagrama
3
abaixo), pelo decidimos proceder ao controlo
timo e obter o ganho com um Regulador
Quadrtico Linear (LQR).
cuja soluo u = Kx . Usando a funo lqr()
do Scilab, obteve-se assim o seguinte ganho
para a realimentao:
Este
mtodo
permitiu
estabilizar
o
sistema
e
obter
as
caractersticas
desejadas
4.2.
LQR-Regulador
Quadrtico
Linear
Como
o
mtodo
clssico
de
sntese
de
demonstrou
ineficaz
decidiu-se
estabilizar
o
sistema
atravs
de
LQR
(controlo
ptimo).
Desta
forma
foi
necessrio
definir
duas
matrizes
intervenientes
na
funo
de
custo,
definidas
a
partir
do
Mtodo
de
Bryson
:
= =
= =
1
!
!"!
1
!
!"!
Assim obteve-se:
Concluiu-se
ento
que
todos
os
estados
so
estveis
e
cumprem
os
requisitos
previamente
estabelecidos.
O
Rolamento
Holands
passou
a
demonstrar
uma
frequncia
natural
de
2.58
Hz
e
um
amortecimento
de
0.66
0.6.
Ambos
os
valores
respeitam
o
critrio
de
incluso
no
Nvel
1.
Quanto
espiral,
sendo
este
modo
agora
estvel,
inclui-se
no
Nvel
1.
Por
fim,
o
modo
de
rolamento
apresenta
uma
constante
de
tempo
T=0.634
s,
o
que
que
mais
uma
vez
compatvel
com
o
critrio
de
incluso
em
Nvel
1.
Estando
o
modelo
estabilizado
e
com
as
caractersticas
pretendidas
foi
possvel
passar
fase
de
controlo
de
trajetria,
modelao
e
incluso
de
sensores/actuadores
e
simulao.
5. Controlo de Atitude
Atravs
do
LQR
obtivemos
o
ganho
ptimo
para
o
sistema
atravs
da
minimizao
de
funo
de
custo:
=
1
2
!
!
( ! + ! )
No enunciado para este projeto era pedido o
controlo dos ngulos de rolamento e de
derrapagem. Sendo esta ltima uma das
possveis formas de controlar o rumo aeronave
decidiu-se proceder ao controlo em
servomecanismo do mesmo. Para o efeito
separou-se a matriz K em vrias matrizes
individuais, tendo-se aplicado o ganho
4
determinado por LQR correspondente ao
ngulo de rolamento em servomecanismo, com
vista a controlar o erro entre o valor do ngulo
de rolamento real (estado) e pretendido
(referncia).
Por forma a anular o ngulo de derrapagem
(beta) acrescentou-se uma linha [1 0 0 0 0 0] e
uma coluna de zeros matriz A, de forma
introduzir um estado integrativo desta varivel.
A realimentao deste com um novo K obtido
atravs de LQR, juntamente com os outros
estados, tem como objectivo forar a anulao
deste estado. Demonstra-se agora os
resultados obtidos atravs do mtodo de
estabilizao anteriormente explicado. Os
resultado apresentam-se em relao a uma
entrada do tipo degrau com amplitude de 25
graus aos 10s e -25 graus ao 25s. A linha verde
representa esse input do ngulo de rolamento
e a linha preta representa a resposta do ngulo
de rolamento. Pela anlise do grfico verifica-se
que o sistema apresenta rapidez mas no tem
erro esttico nulo.
Decidiu-se assim incluir um termo integrativo,
pouco intenso, na entrada de referncia,
escolhido aps algum ajuste, o que melhorou
substancialmente a resposta entrada pedida:
Obteve-se
desta
forma
um
bom
seguimento
do
sinal
de
referncia.
6. Sensores/Actuadores
Para
simular
o
controlador
real
foi
necessrio
introduzir
parmetros
para
os
actuadores
e
sensores
presentes
na
aeronave,
parmetros
estes
que
conseguissem
simular
a
dinmica
dos
sensores
e
actuadores
reais
com
as
respectivas
susceptibilidades
a
rudos
e
limitaes.
6.1.Sensores
Tal
como
nos
dito
no
enunciado
do
projeto
no
existem
sensores
perfeitos.
Isto
significa
que
necessrio
simular
as
suas
limitaes.
Em
relao
ao
beta,
verifica-se
que
este
embora
se
desvie,
tende
sempre
para
0
:
As entradas (beta, p, r, phi e psi) so as
entradas para o sistema porm, tal como de
esperar, a sada ser uma grandeza elctica, em
volts, que por sua vez ter de estar limitado
entre certos valores. Para os ngulos
aerodinmicos, neste caso o beta, o sensor ser
apenas capaz de medir entre 20 e -20 graus
para isso utilizamos um bloco de saturao com
o mximo e o mnimo indicados em radianos.
Seguidamente admite-se que as limitaes
dinmicas do sensor, j que este no
imediato. Assim a constante de tempo do
sensor, neste caso de 0,1s. Para a sada, o
sensor ir emitir uma grandeza entre 5 e 0
volts. Para o simular foi necessrio acrescentar
um ganho e um valor a somar de modo que 20
5
graus origine uma sada de 5v e -20graus
origine uma sada de 0 v. Os clculos basearam-
se simplesmente num sistema de 2 equaes
cujas solues so o ganho e o valor a somar:
5 = (20) +
min 0 = min 20 +
= = 0.125
= 2.5
Para as relaes angulares p e r foi utilizado
exatamente o mesmo raciocnio, tendo-se
obtido o B=0 e K=0.06. O bloco de saturao
neste caso apresentar valores entre 50 e -50
graus/s.
Para phi (ngulo de rolamento) continuou-se
com o mesmo o mesmo raciocnio. Como os
valores mximos e mnimos para a entrada so
90 e -90 graus e a sada estar compreendida
entre 0 e 28v, tal implica K=0,15555(5) e B=14.
Por fim resta apenas o sensor de psi (bssula),
que ir aceitar uma entrada entre 0 e 360 graus
e ter de sair num formato entre 0 e 28v
implicando apenas um ganho K=0,0777(7). Para
alm disso o sensor deste ngulo afectado
pelo rudo exterior que foi simulado por um
bloco random generator, que ir inserir uma
oscilao de 1.5 graus no valor exacto do
ngulo, com uma distribuio aleatria.
6.2.InvSensores
O
sistema
de
controlo,
por
sua
vez
no
vai
aceitar
as
entradas
em
volts
logo
necessrio
voltar
a
converter
as
grandezas
para
graus
e
graus/s.
Isto
conseguido
aplicando
os
invSensores
que
no
nada
mais
nada
menos
do
que
o
mesmo
esquema
do
que
os
sensores
porm
invertido.
Os
ganhos
so
os
inversos
dos
do
sensor
e
os
valores
somados
so
agora
subtrados.
6.3.Actuadores
Os
actuadores
so
elementos
fundamentais
em
todo
o
sistema
uma
vez
que
fazem
a
ponte
entre
o
controlador
e
as
superfcies
de
controlo. Como bvio tambm eles tem as
suas limitaes.
Para simular o atraso dos actuadores foram
inseridas constantes de tempo de 0,1s e para
simular os limites foi usado um bloco de
saturao com os valores de 18 e -18 graus
para os ailerons e 30 e -30 graus para o rudder.
Para concluir a modelao dos actuadores foi
utilizado um bloco sample Holder com 40 hz
para definir a amostragem.
6.4.GPS
Para
determinar
a
posio
da
aeronave
a
cada
instante
utilizado
um
sistema
de
posicionamento
global
(GPS).
O
GPS
ir
aceitar
como
entrada
o
psi
(ngulo
de
rumo)
e
a
ground
speed
(que
no
presente
caso,
sem
vento
e
a
altitude
constante,
tem
o
mesmo
valor
que
U0)
que
ser
decomposta
em
Norte
e
Sul,
integrada
no
tempo
e
somada
posio
inicial,
por
forma
a
obter
as
coordenadas
XY
do
ponto.
Para
simular
o
GPS
real
necessrio
inserir
rudo
atravs
de
um
bloco
random
generetor
que
ir
originar
uma
incerteza
de
3m
na
horizontal
e
de
5
na
vertical.
Para
alm
disso,
tal
como
um
sistema
real,
este
ter
uma
resoluo
que
inserida
no
bloco
quantizer
com
o
valor
de
0.5,
e
o
valor
da
amostragem
que
inserida
no
relgio
do
bloco
sample
holder
com
o
valor
de
1
Hz.
7. Simulao
do
percurso
O
culminar
do
projeto
foi
ento
a
simulao
do
percurso
de
aproximao
ao
aeroporto
de
LCY
de
forma
automtica.
Desta
forma
procedeu-se
a
integrao
dos
sensores
e
actuadores
no
sistema
e
integrao
do
percurso
a
seguir
nas
entradas
no
controlador.
6
Em primeiro lugar for necessrio definir o
percurso a percorrer, de uma forma que
pudesse ser introduzida e compreendida pelo
sistema de controlo. Separou-se assim o
percurso nos seguintes segmentos: A-B, B-C, C-
D, D-O. Os pontos associados encontram-se
definidos na matriz ponto, no ficheiro Controlo
Trajectoria.sce
somado ao ngulo de rumo de referncia, o
que vai efetuar a correo de posio ao longo
do percurso.
Os resultados foram bastante satisfatrios
como se comprovar nos resultados a seguir
explicitados:
O
seguimento
da
trajetria
foi
efectuado
de
duas
formas:
controlo
do
ngulo
de
rumo
(como 0 = ),
a
partir
da
alimentao
do
ngulo
de
referncia
pretendido
em
cada
segmento
do
percurso
(por
exemplo
para
o
percurso
A-B,
= = 290),
e
pelo
controlo
desvio
em
cada
momento
entre
o
avio
e
a
linha
que
define
o
percurso.
Para
os
percursos
definidos
como
linhas
rectas,
este
desvio
calculado
a
partir
do
produto
externo
entre
o
vector
que
define
o
segmento
de
recta
para
o
segmento
de
percurso
em
causa
e
o
vector
que
d
a
posio
do
avio
em
relao
ao
ponto
onde
se
inicia
o
segmento
da
trajetria
que
est
a
percorrer,
a
dividir
pela
norma
do
primeiro.
Este
desvio
positivo
se
o
avio
se
desvia
para
a
direita
do
percurso
de
referncia
e
negativo
em
caso
contrrio.
Por
sua
vez
aplicado
um
ganho
de
-
0.12*pi/180
ao
desvio,
sendo
este
de
seguida
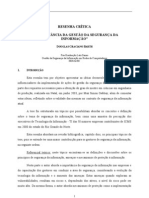
O
esquema
acima
corresponde
ao
percurso
efectuado
pela
aeronave.
Numa
primeira
anlise
no
se
pode
dizer
muito
no
que
toca
ao
seguimento,
a
no
ser
que
mantm
a
forma
pretendida
e
as
dimenses
genricas.
Resta
provar
que
os
erros
durante
o
percurso
so
aceitveis
num
caso
como
este,
pelo
que
se
apresenta
o
grfico
abaixo,
que
ilustra
o
desvio
da
rota
face
rota
pretendida
ao
longo
do
tempo.
Do grfico anterior verifica-se que os erros
ocorrem com um mximo de cerca de 22.5m
o que se julga perfeitamente aceitvel para
uma aeronave a 44m/s, com mudanas de
rumo repentinas e todo o erro associado s
medies. Para alm disso importa verificar
que existem uns picos que ultrapassam os
22.5m, estes ocorrem na primeira mudana
de rumo e depois na semicircunferncia que a
aeronave descreve. de notar que entre os
400 s e 600s, durante a volta coordenada o
erro mostrado no grfico no corresponde
realidade, j que a sua implementao no foi
conseguida com sucesso. O algoritmo por trs
desse controlo consistiria, caso se mostrasse
vivel, na comparao entra o raio da curva
pretendida e a distncia da aeronave ao
centro da circunferncia, que seria de seguida
realimentado da mesma forma que no caso
do desvio de posio, a somar ao ngulo de
rumo de referncia para cada ponto da volta
coordenada, por forma a diminuir ou
aumentar a curvatura da mesma.
derrapagem que so de 15 graus, ou 0.2618
rad.
Para o ngulo de rolamento exatamente o
mesmo raciocnio feito. Este tem sempre
tendncia para os 0 rad e nunca oscilada mais
no que os 0.52 rad (30 graus) permitidos.
Quanto
ao
ngulo
de
rumo
concluimos
que
a
aeronave
rem
a
tendncia
de
seguir
o
pedido
sem
grandes
oscilaes
tal
como
expectvel
No que toca ao ngulo de derrapagem o
objectivo que este se mantenha a 0 graus.
Pelo grfico que ser apresentado de seguida
possivel verificar que existem oscilaes em
torno do 0 graus mas que existe tambm a
tendncia da aeronave corrigir este efeito e
voltar a estabilizar no 0 graus.
Por
ltimo
verifica-se
que
no
ponto
final,
a
coordenada
y
da
posio
apresenta
um
erro
de
-2.7
metros
quando
x=0,
no
incio
da
pista.
Conclui-se
que
apesar
das
oscilaes
estamos
dentro
dos
limites
admitidos
para
o
ngulo
de
8. Concluso
da implementao da verificao e correo
do desvio na volta coordenada, este sistema
pode no ser diretamente extrapolvel para
condies de voo adversas, com perturbaes
atmosfricas muito fortes (vento, ...).
Conclumos que o sistema estvel, e
bastante preciso (2.7m de erro no ponto final
da aterragem), o que prova a eficcia do
sistema projetado para a aplicao na
aproximao a LCY, nas condies indicadas.
Verifica-se por outro lado que, devido falta
9. Anexos
Circuito
Controlo
de
Atitude
Sensores
Sensores
InvSensores
10
Actuadores
GPS
11
Circuito Final-Controlo de trajectria
12
Cdigo
//Beech350
// Conversion
d2r=3.1415/180
kt=0.514
nm=1852
//flight condition: 4'
h=100; M=0.13; aa0=7.02*d2r; gg0=0; u0=85.8*kt; flaps=50*d2r
//throttle:'
th0=71; T0=60821; de0=0.00*d2r; da0=0.00*d2r; dr0=0.00*d2r; Teng=0.45
damax=18*d2r; drmax=30*d2r; flapmax=40*d2r
//inertial data'
m=5530; g=9.81; Ix=63005; Iy=67819; Iz=94947; Ixz=3300
//wing data'
S=28.80; b=17.424; c=1.651; aamax=15.18*d2r
//derivatives (no units or SI units)
xu=-0.1261; xw=0.0751; zu=-0.4403; zw=-0.8156; zwp=-0.0226; zq=-2.4232; mu=0; mw=-0.0581; mq=0.3033; mwp=-0.0023; ybb=-0.0800; lbb=-0.9213; nbb=0.9171; yp=0; lp=-0.6902; np=-0.0374;
yr=0.0095; lr=0.2727; nr=-0.1508; xde=0; zde=-2.401; mde=-1.075; xdf=-0.494; zdf=-4.154; mdf=0.083; xdt=3.729; mdt=-0.046; Lda=-1.805; Nda=0; Ydr=-0.013; Ldr=-0.143; Ndr=-0.315; Yda=0;
tt0=(gg0+aa0)
//Definio das matrizes A e B para Movimento Lateral
A=[ybb, yp+sin(aa0), yr-1, g*cos(tt0)/u0, 0,0;
lbb+(Ixz/Ix)*nbb, lp+(Ixz/Ix)*np, lr+(Ixz/Ix)*nr, 0, 0,0;
nbb+(Ixz/Iz)*lbb, np+(Ixz/Iz)*lp, nr+(Ixz/Iz)*lr, 0, 0,0;
0, 1, tan(tt0), 0, 0,0;
0, 0, sec(tt0), 0, 0,0;
1,0,0,0,0,0]
B=[Yda, Ydr;
Lda+(Ixz/Ix)*Nda, Ldr+(Ixz/Ix)*Ndr;
Nda+(Ixz/Iz)*Lda, Ndr+(Ixz/Iz)*Ldr;
0, 0;
0, 0
0, 0]
Q=diag([1/((1*d2r)^2) 1/((20*d2r)^2) 1/((5*d2r)^2) 1/((20*d2r)^2) 1/((20*d2r)^2)
(1000)]);R=diag([1/((15*d2r)^2) 1/((20*d2r)^2)]); //Usual notations x'Qx + u'Ru
Big=sysdiag(Q,R); //Now we calculate C1 and D12
[w,wp]=fullrf(Big);C1=wp(:,1:6);D12=wp(:,7:$); //[C1,D12]'*[C1,D12]=Big
P=syslin('c',A,B,C1,D12); //The plant (continuous-time)
[K,X]=lqr(P)
K1=[(K(:,1)) (K(:,2)) (K(:,3)) (K(:,6))]
K2=[(K(:,4))]
K3=[(K(:,5))]
posini=[5*nm*cos(143*d2r);5*nm*sin(143*d2r)]
13
global cont
cont=1
function y1=path(u1)
global cont
global distpont
if cont >=5 then
cont = 4
end
nm=1852
ponto=[5*nm*cos(143*d2r) 0 5*nm*cos(290*d2r) -5*nm*cos(95*d2r) 0; 5*nm*sin(143*d2r) 0
5*nm*sin(290*d2r) -5*nm*sin(95*d2r) 0]
dist=sqrt((u1(1)-ponto(1,cont+1))^2+(u1(2)-ponto(2,cont+1))^2)
if dist<50 then
if cont==4 then cont=4
else cont = cont + 1
end
end
y1 = cont;
endfunction;
function y1=path2(u1)
global cont
global distpont
if cont >=5 then
cont = 4
end
nm=1852
ponto=[5*nm*cos(143*d2r) 0 5*nm*cos(290*d2r) -5*nm*cos(95*d2r) 0; 5*nm*sin(143*d2r) 0
5*nm*sin(290*d2r) -5*nm*sin(95*d2r) 0]
dist=sqrt((u1(1)-ponto(1,cont+1))^2+(u1(2)-ponto(2,cont+1))^2)
centro=[-9118.51 2021.53]
if dist<50 then
if cont==4 then cont=4
else cont = cont + 1
end
end
if cont==3 then
distpont=0
//distpont=(((u1(1)-centro(1))^2+(u1(2)-centro(2))^2)^0.5)-5
else
vref=ponto(:,cont+1)-ponto(:,cont);
vac=u1-ponto(:,cont);
distpont=(vref(1)*vac(2)-vac(1)*vref(2))/((vref(1)^2+vref(2)^2)^0.5)
end
y1=distpont;
endfunction;
function y1=volta(u1)
if u1==3 then y1=2, else y1=1
end
endfunction
14
15
You might also like
- Guia para Instalacao e Utilizacao Do Software AcSELerator 120904Document86 pagesGuia para Instalacao e Utilizacao Do Software AcSELerator 120904ERIQUE SOARES SANTOSNo ratings yet
- Decomposição em Fatores Primos. M.D.C e M.M.CDocument24 pagesDecomposição em Fatores Primos. M.D.C e M.M.CHelena Borralho75% (4)
- TCC Transformador Scott - Rodolfo CastanhoDocument42 pagesTCC Transformador Scott - Rodolfo Castanhorodolfo_unespNo ratings yet
- Organizar documentos com ferramentas digitaisDocument40 pagesOrganizar documentos com ferramentas digitaisMarcelo Leal0% (1)
- Guia rápido SPED FiscalDocument3 pagesGuia rápido SPED FiscalGabrielaNo ratings yet
- Micro Mundo 18Document76 pagesMicro Mundo 18ProjetodvdNo ratings yet
- Cinesiologia e biomecânica: o que é e princípios fundamentaisDocument14 pagesCinesiologia e biomecânica: o que é e princípios fundamentaisViviane SampaioNo ratings yet
- Laço IndutivoDocument17 pagesLaço IndutivoRogerio Marques MendonçaNo ratings yet
- Manual Juno StageDocument223 pagesManual Juno StagebrunoviarockNo ratings yet
- Webscraping Dados Da Receira FederalDocument9 pagesWebscraping Dados Da Receira FederalEliCoelhoMedeirosNo ratings yet
- Aplicações Multimédia: Ensino, Formação, EntretenimentoDocument9 pagesAplicações Multimédia: Ensino, Formação, EntretenimentoRaul MarianNo ratings yet
- A importância da gestão da segurança da informaçãoDocument15 pagesA importância da gestão da segurança da informaçãoTainá Alinski100% (1)
- Ficha de Trabalho Língua PortuguesaDocument11 pagesFicha de Trabalho Língua PortuguesaSusana Teixeira0% (1)
- Como criar sites gratuitos com o WixDocument71 pagesComo criar sites gratuitos com o WixFrancisco MartinsNo ratings yet
- Protocolo X10 DomóticaDocument16 pagesProtocolo X10 DomóticajohnNo ratings yet
- Manual de Instalação e Parametrização Altivar 71-BRDocument321 pagesManual de Instalação e Parametrização Altivar 71-BREdersonossemer100% (2)
- Calculo II QuestoesDocument117 pagesCalculo II QuestoesHayane KiviaNo ratings yet
- Concursos e vagas em educação, saúde e segurança no RJDocument12 pagesConcursos e vagas em educação, saúde e segurança no RJLeandro De LimaNo ratings yet
- Amadeus I2Document54 pagesAmadeus I2Felipe MeneghettiNo ratings yet
- Indicadores de desempenho para Data CentersDocument68 pagesIndicadores de desempenho para Data CentersGIFASILVANo ratings yet
- Manual Camera Nikon Colpix s2500 PDFDocument184 pagesManual Camera Nikon Colpix s2500 PDFMarco AurelioNo ratings yet
- LIVRO NovasTecnologiasAplicadasSaudeDocument609 pagesLIVRO NovasTecnologiasAplicadasSaudeGeraldo MirandaNo ratings yet
- Navegação na Internet - Sites, Email, FTP e NewsgroupsDocument41 pagesNavegação na Internet - Sites, Email, FTP e NewsgroupsrodriguesNo ratings yet
- Acupuntura veterináriaDocument47 pagesAcupuntura veterináriaMarcelo OliveiraNo ratings yet
- Agente-Administrativo Prova 2Document7 pagesAgente-Administrativo Prova 2Moisaniel CabralNo ratings yet
- Comandos at para Modens HuaweiDocument4 pagesComandos at para Modens HuaweiFabio OliveiraNo ratings yet
- Aula 07 - ApostilaDocument27 pagesAula 07 - ApostilaAdriano Lopes LoureiroNo ratings yet
- Contas Pagar CNABDocument35 pagesContas Pagar CNABRomeu KettermannNo ratings yet
- Tutorial para Criar Uma Classe PixtonDocument14 pagesTutorial para Criar Uma Classe PixtonCristiane AragãoNo ratings yet
- Report 1920 UAb Prog. Exerc Cios 1 1600126 Estudante - Uab.ptDocument18 pagesReport 1920 UAb Prog. Exerc Cios 1 1600126 Estudante - Uab.ptPatricia PiresNo ratings yet