You might also like
- Fachinformatiker AnwendungsentwicklungDocument4 pagesFachinformatiker AnwendungsentwicklungElizabeth Del CarmenNo ratings yet
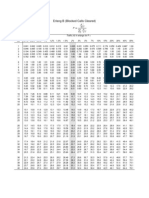
- Erlang B TableDocument4 pagesErlang B TableKemal AkbarNo ratings yet
- Basiswissen Softwaretest InhaltsverzeichnisDocument6 pagesBasiswissen Softwaretest InhaltsverzeichnisNikolasFlemotomosNo ratings yet
- IREB Kapitel 2Document1 pageIREB Kapitel 2Dennis MulderNo ratings yet
- Gefahrenmeldeanlage PDFDocument4 pagesGefahrenmeldeanlage PDFAlfonso Carlos Gutierrez MartinezNo ratings yet
- MPSCAI-2010 Thomas Bindel PDFDocument250 pagesMPSCAI-2010 Thomas Bindel PDFiuliaaaa24100% (1)
- Kai Bollue - RegelungstechnikDocument23 pagesKai Bollue - Regelungstechnikcostagomez99No ratings yet
- 1 4 IperkaDocument5 pages1 4 IperkaaaronNo ratings yet
- DS Klausur 1718Document16 pagesDS Klausur 1718Chenyu ZhangNo ratings yet
- GS 90018-2Document26 pagesGS 90018-2manune01No ratings yet
- Thermodynamik Und Statistische Mechanik: Prof. Dr. Daniel LossDocument35 pagesThermodynamik Und Statistische Mechanik: Prof. Dr. Daniel LossBean PeterNo ratings yet
- Block Schaltbild AlgebraDocument8 pagesBlock Schaltbild AlgebraOmar Corral100% (1)
- InterviewerDocument6 pagesInterviewerchaaibi oumaimaNo ratings yet
- Niklas Luhmann-Das Recht Der Gesellschaft-Suhrkamp Verlag (1995)Document600 pagesNiklas Luhmann-Das Recht Der Gesellschaft-Suhrkamp Verlag (1995)Miguel Gualdrón100% (1)