You might also like
- Conclusiones TesisDocument1 pageConclusiones TesisJhon Alexander NiñoNo ratings yet
- AnteproyectoDocument2 pagesAnteproyectoJhon Alexander NiñoNo ratings yet
- ActCentralU1 JNDocument5 pagesActCentralU1 JNJhon Alexander NiñoNo ratings yet
- Act I Vida Des Complement Aria Su 1Document5 pagesAct I Vida Des Complement Aria Su 1Eduar LindarteNo ratings yet
- Informe FESTODocument18 pagesInforme FESTOJhon Alexander NiñoNo ratings yet
- PT 1Document3 pagesPT 1Jhon Alexander NiñoNo ratings yet
- LeemeDocument1 pageLeemeriklopezNo ratings yet
- Encuestas Recoleccion de FresasDocument4 pagesEncuestas Recoleccion de FresasJhon Alexander NiñoNo ratings yet
- Peer and Team Evaluation InstrumentDocument2 pagesPeer and Team Evaluation InstrumentJhon Alexander NiñoNo ratings yet
- Lab ControlDocument12 pagesLab ControlJhon Alexander NiñoNo ratings yet
- Autocad 2015 InsDocument4 pagesAutocad 2015 InsJhon Alexander NiñoNo ratings yet
- Acuerdo LicitaciónDocument4 pagesAcuerdo LicitaciónJhon Alexander NiñoNo ratings yet
- Paper TemperaturaDocument4 pagesPaper TemperaturaJhon Alexander NiñoNo ratings yet
- Discretizacion PID planta masa-resorte-amortiguadorDocument6 pagesDiscretizacion PID planta masa-resorte-amortiguadorJhon Alexander NiñoNo ratings yet
- Ante ProDocument2 pagesAnte ProJhon Alexander NiñoNo ratings yet
- Tipos de PicDocument4 pagesTipos de PicJhon Alexander NiñoNo ratings yet
- Materiales Fuente DCDocument1 pageMateriales Fuente DCJhon Alexander NiñoNo ratings yet
- CodigoDocument2 pagesCodigoJhon Alexander NiñoNo ratings yet
- Preparacion de Un Paper IeeeDocument3 pagesPreparacion de Un Paper IeeeJhon Alexander NiñoNo ratings yet
- Trabajo Etica 3 CorteDocument2 pagesTrabajo Etica 3 CorteJhon Alexander NiñoNo ratings yet
- Review Inteligencia AtificialDocument3 pagesReview Inteligencia AtificialJhon Alexander NiñoNo ratings yet
- RSE (Trabajo Etica)Document1 pageRSE (Trabajo Etica)Jhon Alexander NiñoNo ratings yet
- Electronica Puntos 7,8 y 9Document5 pagesElectronica Puntos 7,8 y 9Jhon Alexander NiñoNo ratings yet
- Hidrodinámica: Ecuaciones de continuidad y BernoulliDocument15 pagesHidrodinámica: Ecuaciones de continuidad y BernoulliMarcos Maydan81% (16)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
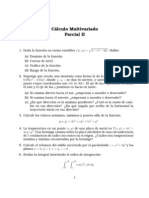
- Parcial 2 Calculo MultivariadoDocument1 pageParcial 2 Calculo MultivariadoJhon Alexander NiñoNo ratings yet
- Propiedades de La LogaritmacionDocument5 pagesPropiedades de La LogaritmacionJhon Alexander NiñoNo ratings yet
- Mapa ConceptualDocument2 pagesMapa ConceptualOscar Alejandro Flórez BarajasNo ratings yet
- 1ra Parte Taller II La Empresa Pronasur 2Document73 pages1ra Parte Taller II La Empresa Pronasur 2Luis CoronadoNo ratings yet
- Taller Afectivo-Sexual.Document6 pagesTaller Afectivo-Sexual.jaiiroNo ratings yet
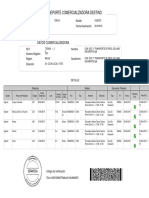
- Reporte Comercializadora DestinoDocument1 pageReporte Comercializadora DestinoFrancisco J. VergaraNo ratings yet
- Andres Ysu Nuevo AmigoDocument8 pagesAndres Ysu Nuevo AmigoJuanJoseJimenezAndrade100% (1)
- EmpresaDocument11 pagesEmpresaBlanca100% (1)
- Solucionario Guía #2 7° Básico MatemáticaDocument5 pagesSolucionario Guía #2 7° Básico MatemáticaLilian E Ojeda PNo ratings yet
- Guía de Estudio de Termodinámica U1Document3 pagesGuía de Estudio de Termodinámica U1Cosita Rica IINo ratings yet
- Electrolab Corporate Brochure SpanishDocument28 pagesElectrolab Corporate Brochure SpanishLalo RuizNo ratings yet
- Taller 9 - Distrib Bivar y GraficosDocument3 pagesTaller 9 - Distrib Bivar y Graficosjuanita mendezNo ratings yet
- Manual DurockDocument13 pagesManual DurockOmegacool100% (5)
- Unidad 2 SucesionesDocument33 pagesUnidad 2 SucesionesSuNo ratings yet
- La Evolucion de Los Medios de Transporte (Informatica) 3 PeriodoDocument3 pagesLa Evolucion de Los Medios de Transporte (Informatica) 3 PeriodoERIKA MUÑOZ VEGANo ratings yet
- Construcción (Español-Inglés) (Glosario)Document161 pagesConstrucción (Español-Inglés) (Glosario)Fa LzmNo ratings yet
- 01salud MentalDocument3 pages01salud MentalAntonio TepoxNo ratings yet
- Desarrollo competencias comunicativasDocument4 pagesDesarrollo competencias comunicativaskatha87100% (1)
- Operacion de Una Micro-Red PDFDocument26 pagesOperacion de Una Micro-Red PDFDaniel Ochoa YepesNo ratings yet
- B01982 01982Document1 pageB01982 01982Huayapa MarlenyNo ratings yet
- Comunicamos Nuestro Reportaje Con Propuestas Al Bicentenario Referidas A La SaludDocument2 pagesComunicamos Nuestro Reportaje Con Propuestas Al Bicentenario Referidas A La SaludFS LeonardoNo ratings yet
- La integración de las funciones universitariasDocument24 pagesLa integración de las funciones universitariasRenan GuillenNo ratings yet
- Rol Del EstudianteDocument1 pageRol Del Estudiantemaria hernandezNo ratings yet
- Ingeniería de Seguridad Industrial y MineraDocument180 pagesIngeniería de Seguridad Industrial y MineraRaul Leonel TejadaNo ratings yet
- Garner A - Hable Con Soltura PDFDocument423 pagesGarner A - Hable Con Soltura PDFrhztn6dmytNo ratings yet
- ALEA23CPDocument2 pagesALEA23CPJose Luis Lima BallesterosNo ratings yet
- Acuerdo de ingresos compartidos HenryDocument14 pagesAcuerdo de ingresos compartidos HenryHernán PizarroNo ratings yet
- Mutombo Con SuizaDocument9 pagesMutombo Con SuizaCarolina BareiroNo ratings yet
- Black Friday: A SoloDocument47 pagesBlack Friday: A SolopauccaponcianoNo ratings yet
- 3.3.3.3 Packet Tracer - Explore A NetworkDocument15 pages3.3.3.3 Packet Tracer - Explore A NetworkLuis CalderonNo ratings yet
- Tesis UPV2910Document660 pagesTesis UPV2910Edwin Saenz PeñalosaNo ratings yet
- DUSSEL E. 1492. El Encubrimiento Del Otro (Fragmento)Document15 pagesDUSSEL E. 1492. El Encubrimiento Del Otro (Fragmento)Daniela Bolaños RomeroNo ratings yet
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (86)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaFrom EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaRating: 5 out of 5 stars5/5 (1)
- Lean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanFrom EverandLean: La Guía Fundamental para Lean Startup, Lean Six Sigma, Lean Analytics, Lean Enterprise, Lean Manufacturing, Scrum, Gestión Agile de Proyectos y KanbanRating: 5 out of 5 stars5/5 (1)
- Auditoría de seguridad informática: Curso prácticoFrom EverandAuditoría de seguridad informática: Curso prácticoRating: 5 out of 5 stars5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (116)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...From EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Rating: 5 out of 5 stars5/5 (4)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasFrom EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasRating: 4.5 out of 5 stars4.5/5 (14)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroFrom EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroRating: 4 out of 5 stars4/5 (1)
- Fundamentos de Redes InformáticasFrom EverandFundamentos de Redes InformáticasRating: 4.5 out of 5 stars4.5/5 (9)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.From EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Rating: 4 out of 5 stars4/5 (51)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DFrom EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DRating: 5 out of 5 stars5/5 (6)
- Lean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteFrom EverandLean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteRating: 4.5 out of 5 stars4.5/5 (5)
- Cuántica: Qué significa la teoría de la ciencia más extrañaFrom EverandCuántica: Qué significa la teoría de la ciencia más extrañaRating: 1 out of 5 stars1/5 (1)
- Cómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaFrom EverandCómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaRating: 4 out of 5 stars4/5 (9)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoFrom EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoNo ratings yet
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.From EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Rating: 3.5 out of 5 stars3.5/5 (3)
- Energía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasFrom EverandEnergía solar autónoma: Una guía práctica para entender e instalar sistemas fotovoltaicos y de bateríasNo ratings yet