You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Section 1: Hardware & SoftwareDocument30 pagesSection 1: Hardware & SoftwareNorth Ruimveldt Secondary SchoolNo ratings yet
- Viewpoint 2 Teacher's BookDocument21 pagesViewpoint 2 Teacher's BookMafeDeHorta27% (15)
- Judith Butler: Performative AgencyDocument16 pagesJudith Butler: Performative Agencyjacquesfatalist100% (2)
- Rankine Theory PDFDocument23 pagesRankine Theory PDFHamza NadeemNo ratings yet
- Selenium WebdriverDocument8 pagesSelenium WebdriverMOHAN SNo ratings yet
- Argillaceous Rock AtlasDocument146 pagesArgillaceous Rock Atlasyaku1618No ratings yet
- Final Demo A Detailed Lesson Plan in Math 1Document8 pagesFinal Demo A Detailed Lesson Plan in Math 1Brenda PelicanoNo ratings yet
- Thesis Defense AljaberiDocument46 pagesThesis Defense AljaberiJose TamayoNo ratings yet
- 3850 Mathematics Stage 3 Marking Guide Sample 2Document1 page3850 Mathematics Stage 3 Marking Guide Sample 2AshleeGedeliahNo ratings yet
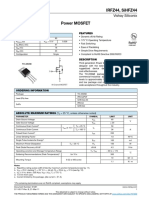
- Power MOSFET datasheet summaryDocument9 pagesPower MOSFET datasheet summaryAkhilesh Kumar MishraNo ratings yet
- Drawing:: SG01 (20KAF) - 3P001-000 SPG30-20KDocument1 pageDrawing:: SG01 (20KAF) - 3P001-000 SPG30-20KAkhilesh Kumar MishraNo ratings yet
- PapersDocument2 pagesPapersAkhilesh Kumar MishraNo ratings yet
- MachineDocument1 pageMachineAkhilesh Kumar MishraNo ratings yet
- Figure 1Document5 pagesFigure 1Akhilesh Kumar MishraNo ratings yet
- Ee 1002Document108 pagesEe 1002Akhilesh Kumar MishraNo ratings yet
- Relaxed ZN Tuning of PI ControllersDocument15 pagesRelaxed ZN Tuning of PI ControllersAkhilesh Kumar MishraNo ratings yet
- ApplicationDocument1 pageApplicationAkhilesh Kumar MishraNo ratings yet
- 2Document3 pages2Akhilesh Kumar MishraNo ratings yet
- PapersDocument2 pagesPapersAkhilesh Kumar MishraNo ratings yet
- Dongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Document2 pagesDongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Akhilesh Kumar MishraNo ratings yet
- Modeling and Control of A Real Time Shell and Tube Heat ExchangerDocument9 pagesModeling and Control of A Real Time Shell and Tube Heat ExchangerAkhilesh Kumar MishraNo ratings yet
- Mi 2Document25 pagesMi 2Akhilesh Kumar MishraNo ratings yet
- Personal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Document2 pagesPersonal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Akhilesh Kumar MishraNo ratings yet
- 8 Permutation & Combination Part 1 of 4Document5 pages8 Permutation & Combination Part 1 of 4Akhilesh Kumar MishraNo ratings yet
- PaperDocument7 pagesPaperAkhilesh Kumar MishraNo ratings yet
- PN Junction Diode Characteristic StudyDocument4 pagesPN Junction Diode Characteristic StudyAkhilesh Kumar MishraNo ratings yet
- Keep 207Document15 pagesKeep 207Akhilesh Kumar MishraNo ratings yet
- Experiment No: Object:-RequirementsDocument4 pagesExperiment No: Object:-RequirementsAkhilesh Kumar MishraNo ratings yet
- UntitledDocument2 pagesUntitledAkhilesh Kumar MishraNo ratings yet
- Test 2Document2 pagesTest 2Akhilesh Kumar MishraNo ratings yet
- RLC Circuit Transient and Frequency Response LabDocument2 pagesRLC Circuit Transient and Frequency Response LabAkhilesh Kumar MishraNo ratings yet
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDocument2 pagesExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- QhlogsDocument1 pageQhlogsMohit KoladiaNo ratings yet
- Experiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkDocument4 pagesExperiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- Lecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionDocument17 pagesLecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionAkhilesh Kumar MishraNo ratings yet
- Academy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Document1 pageAcademy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Akhilesh Kumar MishraNo ratings yet
- Experiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkDocument4 pagesExperiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkAkhilesh Kumar MishraNo ratings yet
- Electrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsDocument5 pagesElectrical Engineering Network Lab Negative Impedance Converter & Gyrator Circuit ExperimentsAkhilesh Kumar MishraNo ratings yet
- Experiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkDocument3 pagesExperiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- Higher Unit 06b Check in Test Linear Graphs Coordinate GeometryDocument7 pagesHigher Unit 06b Check in Test Linear Graphs Coordinate GeometryPrishaa DharnidharkaNo ratings yet
- Data Science CodealphaDocument11 pagesData Science CodealphaSharef Eddine ArarNo ratings yet
- 0105Document45 pages0105jivasumana100% (2)
- PT 2 Pracba1Document2 pagesPT 2 Pracba1LORNA GUIWANNo ratings yet
- Ipcrf - Teacher I - IIIDocument16 pagesIpcrf - Teacher I - IIIMc Clarens LaguertaNo ratings yet
- Plagiarism: Giving Credit Where Credit Is DueDocument16 pagesPlagiarism: Giving Credit Where Credit Is DueAshish GuptaNo ratings yet
- Open Channel Laboratory ExperimentDocument3 pagesOpen Channel Laboratory ExperimentJohn Ceasar PascoNo ratings yet
- Clamdoc PDFDocument55 pagesClamdoc PDFtranduongtinhNo ratings yet
- (ENGL2112) Week 012-Course ModuleDocument3 pages(ENGL2112) Week 012-Course ModuleKaraNo ratings yet
- Decision Making in A Crisis What Every Leader Needs To KnowDocument10 pagesDecision Making in A Crisis What Every Leader Needs To KnowFradegnis DiazNo ratings yet
- Example 1: Casual Conversation: ExplanationDocument3 pagesExample 1: Casual Conversation: Explanationtran diemNo ratings yet
- POWL feeder handle actionDocument10 pagesPOWL feeder handle actionBarun SahaNo ratings yet
- 6.111 DigLab Lab2ReportDocument44 pages6.111 DigLab Lab2ReportAli AhmadNo ratings yet
- Performance Appraisal IntroductionDocument8 pagesPerformance Appraisal IntroductionRohit KumarNo ratings yet
- VSTOA Power ToolsDocument16 pagesVSTOA Power ToolsHerbert LeipoldNo ratings yet
- BBA 4009 Competitive AnalysisDocument20 pagesBBA 4009 Competitive AnalysisVentusNo ratings yet
- Booklet - EpfpclDocument9 pagesBooklet - EpfpclAnonymous G5Od0CTrmeNo ratings yet
- SOP SampleDocument2 pagesSOP SampleLikhit VermaNo ratings yet
- Brigada Eskwela 2019Document12 pagesBrigada Eskwela 2019Renelyn Rodrigo SugarolNo ratings yet