International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
Damping of Sub-synchronous Resonance and Power Swing using TCSC and
Series capacitor
Durga Prasad Ananthu
Rami Reddy Mannem
Assistant Professor, EEE dept.
Guru Nanak Dev Engg College, Bidar
adp.ananthu@gmail.com
M.Tech Scholar, EEE Dept.
SVEC, Suryapet- INDIA
ramreddy.mannem@gmail.com
Abstract The proposed series capacitive compensation scheme is effective in damping power swing as well as sub synchronous resonance
oscillations. The combination of fixed series capacitor and TCSC is termed as a Hybrid technique. In this paper, the effectiveness of a hybrid
series capacitive compensation scheme in damping power system oscillations is evaluated. In this scheme, where two phases are compensated by
fixed series capacitor (C) and the third phase is compensated by a TCSC in series with a fixed capacitor (Cc). The effectiveness of the scheme in
damping power system oscillations for various network conditions, namely different system faults and tie-line power flows is evaluated using
the EMTP-RV time simulation program.
Key WordsFACTS Controllers, series compensation, thyristor controlled series capacitor.
__________________________________________________*****_________________________________________________
1 INTRODUCTION
The transmission network in the INDIA is being
wider due to an increasing demand for power transmission
combined with the difficulty in approving new lines. Series
compensation of transmission lines is a widely-used method
to improve the effective capacity of the transmission system,
thus avoiding the need to build new lines in many parts of
the network. Insertion of capacitive reactance in series with
lines inherent inductive reactance lowers the total effective
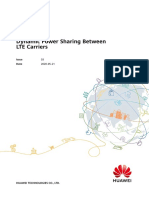
Fig.1 TCSC main circuit
impedance of the line and thus virtually reduces its length.
When a forward-biased thyristor is fired the
As a result both angular and voltage stability in the power
capacitor will be partially discharged through the LC circuit
system gets improved. However, series compensation of
constituted by the thyristor controlled inductive branch and
lines creates the risk of torsional oscillations between the
the capacitor bank. The circulating current pulse passes
electrical network and generators. These oscillations are
through the capacitor in phase with the line current. It
referred to as sub-synchronous resonance (SSR) since they
creates an additional voltage across the capacitor in excess
typically occur at sub-synchronous frequencies that means
of the voltage, which is caused by the line current. The
frequencies less than nominal 50Hz or 60 Hz frequency.
increased voltage at a given line current amplitude is
Because of SSR, generators will get damage.
perceived by the transmission system as if the inserted
capacitive reactance had been increased or boosted by the
During the 90ies the Thyristor Controlled Series
Capacitor (TCSC) was being introduced. In this apparatus a
action of the thyristor valves. The generic waveform of the
TCSC is shown in Fig. 2
thyristor controlled, inductive branch has been connected as
an add-on in parallel with the series capacitor bank (Fig. 1.).
It was recognized early that the characteristics of
the TCSC with respect to SSR differed completely from that
of a passive, fixed series capacitor.
1903
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
yield a resultant compensation equal to the other phases.
Thus, the phase balance is maintained t the power frequency
while at any other frequency, a phase imbalance is created.
To further enhance power oscillations damping, the TCSC is
equipped with a supplementary controller.
The proposed series compensation scheme can be
explained mathematically as:
1) At the power frequency, the series reactances between
buses X and Y in Fig. 1,in phase a, b and c are given by
Fig. 2. Generic waveforms for the TCSC. From top to bottom: line
current, valve current, capacitor voltage, apparent reactance
The latter reveals a capacitive reactance, which is
inversely proportional to the frequency. Accordingly it tends
Where
is the effective capacitive reactance of
the TCSC at the power frequency such that
towards infinity at zero frequency (DC). The apparent
reactance of the TCSC, in contrast, decreases with
2) During any other frequency,fe
frequency and gets zero at zero frequency (DC). The reason
for this dissimilarity is that the TCSC reacts on an injected
sub synchronous line current component by modulating the
thyristor current in the inductive branch. This influences the
sub synchronous current passing through the capacitor,
which determines the sub synchronous voltage across the
The first terms in (2) and (3) are different because of the
difference in frequency. The third term in (3) represents the
change in the effective capacitive reactance of the TCSC
TCSC.
The algorithm that has been selected for the
due to the action of the TCSC supplementary controller.
thyristor triggering control plays the main role in forming
the characteristics of the TCSC with respect to SSR
behaviour.
However,
also
the
regulators
executing
synchronization and boost control do have an impact on the
TCSCs SSR properties.
The thyristor-controlled series capacitor (TCSC) is
one of the most effective countermeasures in practice due to
its natural mitigating effect, as well as its ability to damp
SSR through a controller. However, the strong dependency
Fig. 3 A Schematic Diagram of the hybrid series compensation scheme
between network parameters and generator data plus the
This scheme would, definitely, be economically
complex function of the TCSC require comprehensive
attractive when compared with a full three-phase TCSC
studies prior to the installation of a TCSC into the
which has been used/proposed for power oscillations
transmission system. Fig. 3 shows the series capacitive
damping. Furthermore reducing the number of thyristor
compensation scheme. It is a hybrid series compensation
valves to one third will also have a positive impact on
scheme, where the series capacitive compensation in one
system reliability. The effectiveness of the scheme in
phase is created using a single-phase TCSC in series with a
damping power swings and sub synchronous resonance
fixed capacitor (Cc), and the other two phases are
oscillations is reported in [2], [3]. This paper evaluates the
compensated by fixed series capacitors(C).
The TCSC
effectiveness of the scheme in damping power system
control is initially set such that its equivalent compensations
oscillations. Time domain simulations were conducted on a
at the power frequency combined with the fixed capacitor
benchmark network using the EMTP-RV.
1904
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
II.TEST SCHEME
To demonstrate the effectiveness of the proposed
scheme in power system oscillations damping, the system
shown in Fig. 4 is adopted as a test scheme. It consists of
three large generating stations (G1, G2 and G3) supplying
two load centers (S1 and S2) through five 500 kV
transmission lines. The two double-circuit transmission lines
L1 and L2 are series compensated with fixed capacitor banks
located at the middle of the lines. The compensation degree
of L1 and L2 is 50%. The compensation degree is defined as
the ratio (XC/XL)* 100% for fixed capacitor compensated
phases and (XCc+XTCSC)/XL* 100% for the hybrid
compensated phase.
The total installed capacity and peak load of the
system are 4500 MVA and 3833 MVA respectively. Shunt
capacitors are installed at buses 4 and 5 to maintain their
voltages within 10.05 p.u. Two loading profiles designated
as Load Profiles A and B are considered in the
investigations of this paper. In Load Profile A, S 1 = 1400 +
Fig. 4 Test Scheme
j200 MVA and S2 = 2400 + j300 MVA while in Load
A proportional-integral (PI) control based boost
Profile B, S1 = 2000 + j200 MVA and S2 = 1800 + j300
level controller is implemented to control the TCSC boost
MVA. The power flow results for the bus voltages and the
level to the desired value by adjusting the instant of the
line real power flows of the system for these two loading
expected capacitor voltage zero crossing. The integral part
profiles are shown in the Appendix. The EMTPRV is used
of the controller helps in removing the steady state errors.
as the simulation study tool.
The controller parameters were determined by performing
repeated time domain simulations for the different operating
III. MODELING OF THE SINGLE-PHASE TCSC
The single-phase TCSC is modeled in the EMTPRV as a single module using an ideal thyristor pair and an
RC snubber circuit as shown in Fig. 5. A Phase Locked
Loop (PLL) is used to extract phase information of the
fundamental frequency line current, which will be used to
synchronize TCSC operation. The thyristor gating control is
based on the Synchronous Voltage Reversal (SVR)
technique [4]. The TCSC impedance is measured in terms of
a boost factor kB, which is the ratio of the apparent
reactance of the TCSC seen from the line to the physical
reactance of the TCSC capacitor bank. A positive value of
kB is considered for capacitive operation. A low-pass filter
based estimation algorithm is used to estimate the voltage
and the current phasors. A boost measurement block
performs complex impedance calculations for the boost
conditions. This algorithm uses the difference between the
actual boost level and the reference boost level (err) shown
in Fig. 5 as an objective function. The algorithm starts with
arbitrary initial values for the control parameters and
calculates the values of the objective function each time.
The control parameters are incremented for the next
iteration and the procedure is repeated until the objective
function approaches a minimum value (below a threshold
value). The procedure described above is widely used by
industry for tuning of controller parameters. The multiple
simulations run based tuning procedure similar to the above
was reported in [5]-[6].
In Fig. 5, D(t) is a supplemental signal generated
from an m-stage lead-lag compensation based controller. As
the real power flow in the transmission line is proportional
to the inverse of the total line reactance, the power swing
factor of the TCSC as kB = Imag{VC / IC }/ XCTCSC , where,
damping can be achieved by properly modulating the
VC and IC are the estimated phase voltage and current and
apparent TCSC reactance through this controller. The
XCTCSC is the capacitive reactance of the TCSC capacitor
supplemental controller input (stabilizing) signals could be
branch at the fundamental frequency.
1905
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
local (e.g. real power flows) or remote (e.g. load angles or
IV. TESTSIMULATIONS
This section demonstrates the capability of the
speed deviations of remote generators). If a wide-area
network of Synchronized Phasor Measurement (SPM) units
is available, then the remote signals can be downloaded at
the controller in real time without delay. Local signals are
generally preferred over remote signals as they are more
reliable since they do not depend on communications.
proposed hybrid series compensation scheme in power
system oscillations damping. For this purpose, the scheme is
assumed to be placed in the test scheme replacing the fixed
series capacitive compensation in L1 and L2. Moreover, it is
assumed that each TCSC provides 50% of the total
capacitive compensation and the disturbance is a threecycle, three-phase fault at bus 4. Furthermore, the
performance of the scheme is compared with only fixed
capacitor compensation (Fixed C).
TEST CASE 1:
In this test four different combinations of
stabilizing signals (tabulated in Table I) are examined in
order to determine the combination that would result in the
best system transient time responses. The final results of the
time-domain simulation studies (controllers tuning) are
Fig. 5. Block diagram of a TCSC controller.
shown in Fig. 9 which illustrates the generator load angles,
measured with respect to generator 1 load angle, during and
In Fig. 5, kBref is the TCSC boost level set point.
The Synchronous Voltage Reversal block solves for angle
after fault clearing.
from the non-linear relation, uCZ = XoiLM [ tan( )],
where uCZ is the estimated capacitor voltage at the desired
instant when the capacitor voltage zero crossing occurs, iLM
is the measured value of the line current iL, X0 is the TCSC
capacitor reactance at the TCSC resonance frequency, is
the ratio between the TCSC resonance frequency and the
system fundamental frequency and is the angle difference
between the firing time and the voltage zero-crossing. The
value of is used to calculate the exact firing instants of the
individual thyristors. The non-linear relationship between
the boost factor and the thyristor firing angle is shown in
Fig. 6
Fig. 7 Simulation diagram of Fixed Compensatin
It can also be seen from Fig. 9 that the best
damping of the relative load angle responses are achieved
with the 21- 21 combination. The second best damped
responses are obtained with the 31-21 combination. These
results should be expected due to the direct relationship
between the relative load angles and the generators that
yield the problem. It can also be seen from Fig. 9 that the
worst damped responses are obtained with PL1- 21
combination which results also in the increase of the first
swings.
Fig. 6. TCSC boost factor as a function of the thyristor firing angle .
1906
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
TABLE I
The Four Examined Combinations Of Stabilizing Signals
For Test Case 1
Combination
Each TCSC in L1
Each TCSC in L2
21
21
31
21
31
PL2
PL1
21
Fig. 9 Generator load angles, measured with respect to generator 1
load angle, during and after clearing a three-phase fault at bus 4 (Test
case A).
TEST CASE 2:
In this case, 21 is used as the supplementary
controllers stabilizing signal.
Fig. 10 illustrates the
generator load angles, measured with respect to generator 1
load angle, during and after fault clearing. It can be seen
from Fig. 10 that, at this loading profile, the hybrid singlephase-TCSC scheme provides again a better damping
performance to system oscillations compared to fixed
capacitor compensation. It is observed, however, that there
is a slight increase in the first swing of 21
Fig. 10. Generator load angles, measured with respect to generator 1
load angle, during and after clearing a three-phase fault at bus 4 (Test
case 2).
TEST CASE 3:
In this case Any of the four signals, 21, 31, PL1 and
PL2contains the systems two natural modes of oscillations
Fig. 8 Simulation diagram of the hybrid TCSC compensation scheme .
and can be used to add damping to these modes as it has
been demonstrated in Test Case I. it is a dual channel
controller, in this The sum of two properly selected signals,
however, should result in a more effective damping. The
reason is that the two natural modes of oscillations are, in
general, not in phase. A dual-channel controller would
adjust separately the gain and phase of each mode of
oscillations and, thus, provides a better damping. The results
shows that the best and second best damped responses are
obtained with 21 PL1 and 31 PL2 Fig.11 illustrates the
generator load angles, measured with respect to generator1
load angle, during and after fault clearing. These results (in
red color) are compared to the hybrid case of Fig. 10
1907
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 2 Issue: 7
ISSN: 2321-8169
1903 1908
_______________________________________________________________________________________________
V. CONCLUSION
The paper presents the application of a new hybrid
series capacitive compensation scheme in damping sub
synchronous resonance (SSR) and power swing. The hybrid
series capacitive compensation scheme is more effective in
damping power system oscillations compared to a fixed
series capacitor. The effectiveness of the presented scheme
in damping power system oscillations is obtained through
simulations of case studies on a test scheme.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
Fig. 11. Generator load angles, measured with respect to generator 1
load angle, during and after clearing a three-phase fault at bus (Test
case 3,dual-channel controller).
Narain G. Hingorani and Laszlo Gyugyi, Understanding
FACTS, Concepts and Technology of Flexible AC
Transmission Systems, IEEE Press, 2000.
E.V. Larsen, J.J. Sanchez-Gasca and J.H. Chow, Concepts
for Design of FACTS Controllers to Damp Power Swings,
IEEE Transactions on Power Systems, Vol. 10, No. 2, May
1995, pp. 948-95
B. Chaudhuri and B. Pal, Robust Damping of Multiple
Swing Modes Employing Global Stabilizing Signals with a
TCSC, IEEE Transactions on Power System, Vol. 19, No.
1, February 2004, pp. 499506.
Lennart ngquist, Synchronous Voltage Reversal Control
of Thyristor Controlled Series Capacitor, Royal Institute of
Technology, TRITAETS- 2002-07, ISSN 1650-674X
A.M. Gole, S. Filizadeh, R.W. Menzies and P.L. Wilson,
Optimization-enabled
Electromagnetic
Transient
Simulation, IEEE Transactions on Power Delivery, Vol. 20,
No.1 January 2005, pp 512518
R. Majumder, B.C. Pal, C. Dufour and P. Korba, Design
and Real-Time Implementation of Robust FACTS Controller
for Damping Inter-Area Oscillation, IEEE Transactions on
Power Systems, Vol. 21, No.2, May 2006, pp. 809-816.
BIOGRAPHY
Fig. 12 illustrates the three-phase voltages, VX-Y,
across the hybrid single-phase-TCSC compensation scheme
(installed in L1 and the controllers are Pair 2) during and
after clearing the fault. The system phase imbalance during
the disturbance is clearly noticeable especially in phase C.
M RAMI REDDY completed B.Tech degree from
JNTU Hyderabad and doing his M.Tech in Power Electronics from
S.V Engg. College /JNTU Hyderabad. He worked for Sagar
Cements as a Sr.Engineer and his area of interests in Power
Electronics and Drives, PLC automation.
A DURGA PRASAD, completed B.Tech degree from
JNTU Hyderabad And obtained his M.Tech Power Electronics
degree from JNTU Hyderabad. Currently he is working for Guru
Nanak Dev Engineering College as an Assistant Professor and his
area of interest in Renewable energy sources.
Fig.12 Phase voltages, VX-Y across the hybrid single-phase-TCSC
scheme on L1 during and after clearing a three-phase fault at bus 4
1908
IJRITCC | July 2014, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
You might also like
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 pagesA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNo ratings yet
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 pagesChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNo ratings yet
- Regression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeDocument7 pagesRegression Based Comparative Study For Continuous BP Measurement Using Pulse Transit TimeEditor IJRITCCNo ratings yet
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 pagesChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNo ratings yet
- Performance Analysis of Image Restoration Techniques at Different NoisesDocument4 pagesPerformance Analysis of Image Restoration Techniques at Different NoisesEditor IJRITCCNo ratings yet
- IJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Document3 pagesIJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Editor IJRITCCNo ratings yet
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNo ratings yet
- Comparative Analysis of Hybrid Algorithms in Information HidingDocument5 pagesComparative Analysis of Hybrid Algorithms in Information HidingEditor IJRITCCNo ratings yet
- Fuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewDocument4 pagesFuzzy Logic A Soft Computing Approach For E-Learning: A Qualitative ReviewEditor IJRITCCNo ratings yet
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDocument5 pagesDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCNo ratings yet
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNo ratings yet
- Modeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleDocument4 pagesModeling Heterogeneous Vehicle Routing Problem With Strict Time ScheduleEditor IJRITCCNo ratings yet
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 pagesA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNo ratings yet
- Importance of Similarity Measures in Effective Web Information RetrievalDocument5 pagesImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCNo ratings yet
- Network Approach Based Hindi Numeral RecognitionDocument4 pagesNetwork Approach Based Hindi Numeral RecognitionEditor IJRITCCNo ratings yet
- Efficient Techniques For Image CompressionDocument4 pagesEfficient Techniques For Image CompressionEditor IJRITCCNo ratings yet
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDocument3 pagesSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaNo ratings yet
- A Clustering and Associativity Analysis Based Probabilistic Method For Web Page PredictionDocument5 pagesA Clustering and Associativity Analysis Based Probabilistic Method For Web Page Predictionrahul sharmaNo ratings yet
- Prediction of Crop Yield Using LS-SVMDocument3 pagesPrediction of Crop Yield Using LS-SVMEditor IJRITCCNo ratings yet
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDocument3 pagesPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaNo ratings yet
- A Content Based Region Separation and Analysis Approach For Sar Image ClassificationDocument7 pagesA Content Based Region Separation and Analysis Approach For Sar Image Classificationrahul sharmaNo ratings yet
- Itimer: Count On Your TimeDocument4 pagesItimer: Count On Your Timerahul sharmaNo ratings yet
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDocument5 pagesHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaNo ratings yet
- A Study of Focused Web Crawling TechniquesDocument4 pagesA Study of Focused Web Crawling TechniquesEditor IJRITCCNo ratings yet
- 45 1530697786 - 04-07-2018 PDFDocument5 pages45 1530697786 - 04-07-2018 PDFrahul sharmaNo ratings yet
- 44 1530697679 - 04-07-2018 PDFDocument3 pages44 1530697679 - 04-07-2018 PDFrahul sharmaNo ratings yet
- Image Restoration Techniques Using Fusion To Remove Motion BlurDocument5 pagesImage Restoration Techniques Using Fusion To Remove Motion Blurrahul sharmaNo ratings yet
- Space Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud DataDocument12 pagesSpace Complexity Analysis of Rsa and Ecc Based Security Algorithms in Cloud Datarahul sharmaNo ratings yet
- Vehicular Ad-Hoc Network, Its Security and Issues: A ReviewDocument4 pagesVehicular Ad-Hoc Network, Its Security and Issues: A Reviewrahul sharmaNo ratings yet
- 41 1530347319 - 30-06-2018 PDFDocument9 pages41 1530347319 - 30-06-2018 PDFrahul sharmaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Realtek Flat Panel Display Controller RTD2010: Product BriefDocument12 pagesRealtek Flat Panel Display Controller RTD2010: Product BriefUmar MahmudNo ratings yet
- User'S Manual of MCP61P Platform Processor Chipset Series Quad Core AMD ProcessorDocument20 pagesUser'S Manual of MCP61P Platform Processor Chipset Series Quad Core AMD Processormario vasquezNo ratings yet
- Data Communications and Network FundamentalsDocument408 pagesData Communications and Network FundamentalsKiruthika TamilselvanNo ratings yet
- Josephson Modified Variable Threshold Logic Gates For Use in Ultra-High-speed LSIDocument14 pagesJosephson Modified Variable Threshold Logic Gates For Use in Ultra-High-speed LSIihbrusansuharshNo ratings yet
- Dynamic Power Sharing Between LTE Carriers (ERAN16.1 - 03)Document52 pagesDynamic Power Sharing Between LTE Carriers (ERAN16.1 - 03)VVLNo ratings yet
- Led Lighting Power Controller: Features ApplicationsDocument36 pagesLed Lighting Power Controller: Features ApplicationsVaibhavNo ratings yet
- Lect 00Document11 pagesLect 00WangNo ratings yet
- Pinball Addressable LEDs (PAL) User GuideDocument15 pagesPinball Addressable LEDs (PAL) User GuidejlpicardNo ratings yet
- Antena t2fdDocument3 pagesAntena t2fdlu1agp100% (1)
- Ic Aio-700-24&27 HMM 201601Document77 pagesIc Aio-700-24&27 HMM 201601asbolegendNo ratings yet
- Kinetix 6000MDocument146 pagesKinetix 6000MEsteban BrenesNo ratings yet
- B.Sc. Special Honours Degree in Information Technology (Computer Systems & Networking) Mid-term ExaminationDocument4 pagesB.Sc. Special Honours Degree in Information Technology (Computer Systems & Networking) Mid-term ExaminationGamindu UdayangaNo ratings yet
- NX200Document102 pagesNX200FABIANNo ratings yet
- Advanced 3G and 4G Wireless MobileDocument2 pagesAdvanced 3G and 4G Wireless MobileApoorva AakarshNo ratings yet
- LAB2Document7 pagesLAB2Møhâmmåd ÑäfãíNo ratings yet
- Choose The Right Data Converter For Your ApplicationDocument78 pagesChoose The Right Data Converter For Your ApplicationAnonymous 3mJfZENo ratings yet
- Automatic Generation ControlDocument5 pagesAutomatic Generation ControlMuhammad Nizamuddin100% (1)
- tk-2000 Service Manual PDFDocument32 pagestk-2000 Service Manual PDFJose VillalobosNo ratings yet
- 0009 - USDA 5000 Tonnage SPOB-1Document7 pages0009 - USDA 5000 Tonnage SPOB-1lutvi engineeringNo ratings yet
- Section 8: Inter-RAT Handover: Single Radio Voice Call Continuity (SRVCC)Document19 pagesSection 8: Inter-RAT Handover: Single Radio Voice Call Continuity (SRVCC)Aseem Rajpal100% (2)
- Jed Sep 17Document55 pagesJed Sep 17kashif100% (1)
- QSL9 Series PDFDocument4 pagesQSL9 Series PDFAnonymous 3RS6JNcNo ratings yet
- Emergency Cloud System: Jesse Alexander, WB2IFS/3 Prince George's County ARES/RACES, Clinton Cert, SkywarnDocument25 pagesEmergency Cloud System: Jesse Alexander, WB2IFS/3 Prince George's County ARES/RACES, Clinton Cert, SkywarnMike HammondsNo ratings yet
- Raytheon Radio and Television Recieving Tube Data 1957Document54 pagesRaytheon Radio and Television Recieving Tube Data 1957kgrhoadsNo ratings yet
- Digital System Desgin Study AssignmentDocument5 pagesDigital System Desgin Study AssignmentZohaib AliNo ratings yet
- Recloser NOJA 560 04Document12 pagesRecloser NOJA 560 04Richard Q. RojasNo ratings yet
- Stet 2023 (Computer Science) Full Form: Programming Learning Center Search On Youtube:-@plc - SD Like and SubscribeDocument7 pagesStet 2023 (Computer Science) Full Form: Programming Learning Center Search On Youtube:-@plc - SD Like and SubscribeShiv KantNo ratings yet
- Introduction To Flash Memory: Proceedings of The IEEE May 2003Document15 pagesIntroduction To Flash Memory: Proceedings of The IEEE May 2003joe angelo bascoNo ratings yet
- Twdlcaa24Drf: Product Data SheetDocument4 pagesTwdlcaa24Drf: Product Data SheetDjebbi SamiNo ratings yet
- Taller01 FullDocument4 pagesTaller01 FullAlexander DitestaNo ratings yet