You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Circle of Fifths Guitar PDFDocument15 pagesCircle of Fifths Guitar PDFJose PradoNo ratings yet
- Fault Detection of Electrical Motors Based On Vibration AnalysisDocument7 pagesFault Detection of Electrical Motors Based On Vibration AnalysisJose PradoNo ratings yet
- Guitar Chords Ebook PDFDocument24 pagesGuitar Chords Ebook PDFbottom2x100% (1)
- Chords Intervals Construction PDFDocument31 pagesChords Intervals Construction PDFDavid BogNo ratings yet
- Modelling and Analysis of BladeDocument8 pagesModelling and Analysis of BladeJose PradoNo ratings yet
- Overlapped FFT ProcessingDocument24 pagesOverlapped FFT ProcessingvandalashahNo ratings yet
- Learning The ModesDocument3 pagesLearning The ModesJose PradoNo ratings yet
- Fachords Scales ArpeggiosDocument24 pagesFachords Scales ArpeggiosJose PradoNo ratings yet
- 40 Exotic Guitar Scales Patterns PDFDocument17 pages40 Exotic Guitar Scales Patterns PDFJose PradoNo ratings yet
- Waveform DigitizersDocument71 pagesWaveform DigitizersJose Prado100% (1)
- Condition Monitoring of Centrifugal Blower Using Vibration Analysis PDFDocument10 pagesCondition Monitoring of Centrifugal Blower Using Vibration Analysis PDFJose PradoNo ratings yet
- Steam Turbine Blade Failures PDFDocument24 pagesSteam Turbine Blade Failures PDFJose PradoNo ratings yet
- Rotating Machine Fault Diagnostics Using VibrationDocument234 pagesRotating Machine Fault Diagnostics Using VibrationJose PradoNo ratings yet
- The Art of Gear Fabrication PDFDocument222 pagesThe Art of Gear Fabrication PDFJose Prado100% (2)
- Appreciating The Japanese Sword by NBTHK PDFDocument7 pagesAppreciating The Japanese Sword by NBTHK PDFDaniel Nicolas BriccolaNo ratings yet
- Japanese SwordsDocument6 pagesJapanese SwordsJose PradoNo ratings yet
- SKF Bearing Failure and CausesDocument44 pagesSKF Bearing Failure and CausescazacuphNo ratings yet
- Thermosiphon Reboilers: Characteristics and Design ParametersDocument7 pagesThermosiphon Reboilers: Characteristics and Design ParametersAlwin James100% (1)
- Electrically Induced Bearing Damage and Shaft Currents PDFDocument76 pagesElectrically Induced Bearing Damage and Shaft Currents PDFJose PradoNo ratings yet
- Motor Bearing Current PhenomenonDocument13 pagesMotor Bearing Current PhenomenonJose PradoNo ratings yet
- 15 Years Later: On The Physics of High-Rise Building CollapsesDocument6 pages15 Years Later: On The Physics of High-Rise Building CollapsesrawoNo ratings yet
- Guideline For Field Testing of Reciprocating Compressor Performance PDFDocument173 pagesGuideline For Field Testing of Reciprocating Compressor Performance PDFJose PradoNo ratings yet
- An Investigation of Shaft Current in A Large Sleeve Bearing Induction MachineDocument358 pagesAn Investigation of Shaft Current in A Large Sleeve Bearing Induction MachineJose Prado100% (1)
- Electrically Induced Bearing Damage and Shaft Currents PDFDocument76 pagesElectrically Induced Bearing Damage and Shaft Currents PDFJose PradoNo ratings yet
- Remote Experimental Vibration Analysis of Mechanical Structures Over The InternetDocument14 pagesRemote Experimental Vibration Analysis of Mechanical Structures Over The InternetJose PradoNo ratings yet
- Full Spectrums and Other Vibration Two-DimensionaDocument5 pagesFull Spectrums and Other Vibration Two-DimensionaTecnicas Predictivas SacNo ratings yet
- Time-Frequency Analysis of Shock and Vibration MeasurementsDocument10 pagesTime-Frequency Analysis of Shock and Vibration MeasurementsJose PradoNo ratings yet
- The Rationale of Monitoring Vibration On Rotating Machinery PDFDocument10 pagesThe Rationale of Monitoring Vibration On Rotating Machinery PDFJose PradoNo ratings yet
- Implementation of The Vold-Kalman Order Tracking FiltersDocument8 pagesImplementation of The Vold-Kalman Order Tracking FiltersJose PradoNo ratings yet
- The Art of Gear Fabrication PDFDocument222 pagesThe Art of Gear Fabrication PDFJose Prado100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cetco Hydraul EzDocument4 pagesCetco Hydraul Ezjaredf@jfelectric.comNo ratings yet
- MTC Spec 1916Document3 pagesMTC Spec 1916Indwell RaigarhNo ratings yet
- BT 203 Basic Mechanical Engineering May 2019 PDFDocument2 pagesBT 203 Basic Mechanical Engineering May 2019 PDFKunta PatleNo ratings yet
- DPR Nag River Volume IIIDocument290 pagesDPR Nag River Volume IIIashutosh_shahu1No ratings yet
- Analysis of Hard WaterDocument3 pagesAnalysis of Hard WaterPankaj Patel100% (4)
- QIAexpress Detection and Assay HandbookDocument104 pagesQIAexpress Detection and Assay HandbookghadbaneNo ratings yet
- Dual Plate Check ValveDocument38 pagesDual Plate Check ValveVikas Kumar PathakNo ratings yet
- PROBLEMS Holtz and KovacsDocument3 pagesPROBLEMS Holtz and KovacsDaniel L. Blanco Pérez0% (2)
- SS316 Butt WeldingDocument124 pagesSS316 Butt Weldingdevinder_bamrahNo ratings yet
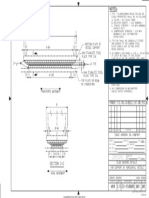
- DD 950008 001Document1 pageDD 950008 001Abu Anas M.SalaheldinNo ratings yet
- Solutions To Heat TransferDocument7 pagesSolutions To Heat TransferCharisse MadiaNo ratings yet
- SI-TEC Chiller Controller GuideDocument12 pagesSI-TEC Chiller Controller GuideomarNo ratings yet
- Millman Halkias - Integrated ElectronicsDocument14 pagesMillman Halkias - Integrated ElectronicsSushruti Richaa KashyapNo ratings yet
- Rates Worksheet HWDocument8 pagesRates Worksheet HWMr. CrustNo ratings yet
- DS2000 Manually EU ENDocument6 pagesDS2000 Manually EU ENLuis Manso PeñaNo ratings yet
- MSDS PaoDocument3 pagesMSDS PaoPriski BAPNo ratings yet
- MCQ MasterDocument11 pagesMCQ MasterMonzieAir67% (9)
- CompositesWorld Oct2018 PDFDocument84 pagesCompositesWorld Oct2018 PDFaerostress0% (1)
- ASTM F1089-18 Standard Test Method For Corrosion of Surgical InstrumentsDocument1 pageASTM F1089-18 Standard Test Method For Corrosion of Surgical InstrumentsMarketing ProjectNo ratings yet
- 4-Quinolone Hybrids and Their Antibacterial ActivitiesDocument11 pages4-Quinolone Hybrids and Their Antibacterial ActivitiesKevin ArechigaNo ratings yet
- 11 Chapter Reaction Kinetics Text Book Exercise PDFDocument14 pages11 Chapter Reaction Kinetics Text Book Exercise PDFBilal KhanNo ratings yet
- WRS 2008 CatalogDocument34 pagesWRS 2008 CatalogYimmy Alexander Parra MarulandaNo ratings yet
- Chapter 2 Fluid StaticsDocument13 pagesChapter 2 Fluid StaticsguhanNo ratings yet
- Steam Trap PerformanceDocument36 pagesSteam Trap Performancenewnse2008No ratings yet
- Bi Rotator FormDocument17 pagesBi Rotator FormBùi Hắc HảiNo ratings yet
- The Solar DynamoDocument29 pagesThe Solar Dynamoanizha_nNo ratings yet
- 38CKC 8PDDocument36 pages38CKC 8PDjean_carlos_abreu_rNo ratings yet
- Ultrasonic Testing Equipment Manufacturers - Canopus InstrumentsDocument1 pageUltrasonic Testing Equipment Manufacturers - Canopus InstrumentscanopusinstrumentsNo ratings yet
- Calibration Frequency enDocument4 pagesCalibration Frequency enGrandy Anantha SaktiNo ratings yet
- Book Print Gunastar Final - 1528261270Document103 pagesBook Print Gunastar Final - 1528261270santoshNo ratings yet