You might also like
- Effects of Poles and Zeros On Performance of Control SystemsDocument18 pagesEffects of Poles and Zeros On Performance of Control SystemsMuriz AdemovićNo ratings yet
- CHE160 - 2022-2023 - Module 5Document36 pagesCHE160 - 2022-2023 - Module 5anthonyNo ratings yet
- Time Response of Second Order SystemDocument6 pagesTime Response of Second Order SystempraneethNo ratings yet
- Lab - 06 56Document23 pagesLab - 06 56MEEN201101056 KFUEITNo ratings yet
- Machine Control SystemsDocument9 pagesMachine Control SystemsHisham SyedNo ratings yet
- Open Loop Closed LoopDocument12 pagesOpen Loop Closed LoopKarthik RamNo ratings yet
- Control System Analysis Poles of A Transfer FunctionDocument4 pagesControl System Analysis Poles of A Transfer FunctionRyan Kim PatronNo ratings yet
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- Control System Fundamental: Time Response AnalysisDocument77 pagesControl System Fundamental: Time Response Analysisoneisa92100% (1)
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendseNo ratings yet
- Transfer Functions: This Operation Can Be Performed Using This CommandDocument46 pagesTransfer Functions: This Operation Can Be Performed Using This CommandJasleen Kaur HoraNo ratings yet
- Higher Order Systems Second Order SystemsDocument13 pagesHigher Order Systems Second Order SystemsZeus OlympusNo ratings yet
- EEN-305 Advanced Control Systems Lab ReportDocument16 pagesEEN-305 Advanced Control Systems Lab ReportRitik MathurNo ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Dynamic Behavior of More General SystemsDocument32 pagesDynamic Behavior of More General Systemsjasonbkyle9108No ratings yet
- Assignment Control SystemDocument5 pagesAssignment Control SystemSaiNo ratings yet
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- Stability analysis of feedback systemsDocument28 pagesStability analysis of feedback systemsphmferreiraNo ratings yet
- Exp 1 CsecoverDocument5 pagesExp 1 CsecoverramsvsjbNo ratings yet
- Week 2B - Online Classes - S2020 PDFDocument18 pagesWeek 2B - Online Classes - S2020 PDFIzax Afxal KhanNo ratings yet
- Tutorial 5Document2 pagesTutorial 5Gaurav ANo ratings yet
- Unit-5 Measurement and Control SystemDocument30 pagesUnit-5 Measurement and Control SystemDavinder SinghNo ratings yet
- 2 PDFDocument34 pages2 PDFShaik RahmathullaNo ratings yet
- Time Domain Response and Control Characteristics: ObjectivesDocument11 pagesTime Domain Response and Control Characteristics: ObjectivesÃbdûł HãnñāńNo ratings yet
- Unit Step Function in MatlabDocument6 pagesUnit Step Function in Matlabshaista005100% (3)
- On Input-to-State Stability For Time Varying Nonlinear SystemsDocument6 pagesOn Input-to-State Stability For Time Varying Nonlinear SystemsFathi MusaNo ratings yet
- Disturbance Rejection and Noise Attenuation:: Control 1, Second MaterialDocument5 pagesDisturbance Rejection and Noise Attenuation:: Control 1, Second MaterialKaram AlmasriNo ratings yet
- Laplace TTDocument56 pagesLaplace TTFares AlghamdiNo ratings yet
- Laplas TransformDocument17 pagesLaplas TransformRatnakar PatilNo ratings yet
- Notes Installment 1Document21 pagesNotes Installment 1amitshukla.iitkNo ratings yet
- ChE 171 Module 3: First-Order Open Loop SystemsDocument15 pagesChE 171 Module 3: First-Order Open Loop SystemsErnie Mark Patosa MaratasNo ratings yet
- Delta Function: Laplace TransformDocument3 pagesDelta Function: Laplace TransformMohammed AbidNo ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument15 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- FME 326 - Module 4 - Time ResponseDocument29 pagesFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNo ratings yet
- Analyzing System Time Response Using Poles and ZerosDocument29 pagesAnalyzing System Time Response Using Poles and ZerosJesse Jon FerolinoNo ratings yet
- FME 326 - Module 4 - Time ResponseDocument29 pagesFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNo ratings yet
- ME5012 - Electronic Systems, Control and ComputingDocument9 pagesME5012 - Electronic Systems, Control and ComputingMounir MikhaelNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument13 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- Notes Installment 1Document21 pagesNotes Installment 1silmon125No ratings yet
- Control System Manual 1 To 5Document23 pagesControl System Manual 1 To 5Eashan PendseNo ratings yet
- Lab6 - System Analysis (2) - 14-05-2018Document31 pagesLab6 - System Analysis (2) - 14-05-2018Eng. Ibrahim Abdullah AlruhmiNo ratings yet
- Analyzing Time Domain ResponseDocument15 pagesAnalyzing Time Domain ResponseBasharat AslamNo ratings yet
- Material 5 - Time Domain Response Analysis-1Document6 pagesMaterial 5 - Time Domain Response Analysis-1Ninggar TitanNo ratings yet
- Transfer FunctionDocument10 pagesTransfer FunctionFiq Iskandar100% (1)
- CS Mod3@AzDOCUMENTS - inDocument46 pagesCS Mod3@AzDOCUMENTS - insssNo ratings yet
- 1 Lab Manual-Final-Control-System-1Document35 pages1 Lab Manual-Final-Control-System-1Shimalis RetaNo ratings yet
- 1-Module3 - Time Domain AnalysisDocument12 pages1-Module3 - Time Domain AnalysisShashankaNo ratings yet
- Navtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsDocument24 pagesNavtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsNavtej MishraNo ratings yet
- Transfer Functions: PrerequisitesDocument12 pagesTransfer Functions: PrerequisitesthotalnNo ratings yet
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocument49 pagesTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- IntroductionDocument14 pagesIntroductionslo803421No ratings yet
- EFFECTS OF ADDITION OF POLES AND ZEROS IN ROOT LOCUS SPDocument6 pagesEFFECTS OF ADDITION OF POLES AND ZEROS IN ROOT LOCUS SPSujin PrajapatiNo ratings yet
- CHAPTER 1 Modeling in The Frequency DomainDocument17 pagesCHAPTER 1 Modeling in The Frequency DomainAnnette TageufoueNo ratings yet
- Department of Electromechanical Engineering Course Title: Control SystemDocument25 pagesDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNo ratings yet
- Experiment No 1 Analysis of Control System ParametersDocument6 pagesExperiment No 1 Analysis of Control System Parameterspratik KumarNo ratings yet
- Frequency Response of Lsi SystemsDocument30 pagesFrequency Response of Lsi SystemsAbhilash GhanoreNo ratings yet
- Non Min PhaseDocument5 pagesNon Min PhaseagrothendieckNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
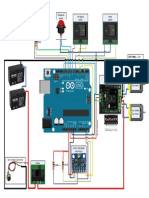
- Arduino Segwey SchemDocument1 pageArduino Segwey SchemJimmy Deswidawansyah NasutionNo ratings yet
- Exam 1 Answers: Logic and Proof Q250 FALL 2012, I NDIANA U NIVERSITYDocument9 pagesExam 1 Answers: Logic and Proof Q250 FALL 2012, I NDIANA U NIVERSITYfancy_maskNo ratings yet
- Wlan 6Document2 pagesWlan 6fancy_maskNo ratings yet
- Selecting Temperature and Level SensorsDocument2 pagesSelecting Temperature and Level Sensorsfancy_maskNo ratings yet
- Aircraft Control Systems OverviewDocument182 pagesAircraft Control Systems OverviewlhomssiNo ratings yet
- Prayer Times in Xi'an (Shaanxi) - Year 2018: PrintDocument2 pagesPrayer Times in Xi'an (Shaanxi) - Year 2018: Printfancy_maskNo ratings yet
- 750 Famous QuotesDocument53 pages750 Famous Quotesfancy_maskNo ratings yet
- The Du'Aa Is The Weapon of The BelieverDocument32 pagesThe Du'Aa Is The Weapon of The Believerfancy_maskNo ratings yet
- Aircraft Control Systems OverviewDocument182 pagesAircraft Control Systems OverviewlhomssiNo ratings yet
- The Du'Aa Is The Weapon of The BelieverDocument32 pagesThe Du'Aa Is The Weapon of The Believerfancy_maskNo ratings yet
- FIK PresentationDocument5 pagesFIK Presentationfancy_maskNo ratings yet
- An Overview ZigbeeDocument6 pagesAn Overview Zigbeefancy_maskNo ratings yet
- Second Order Step Response 011705Document5 pagesSecond Order Step Response 011705Rohit RaviNo ratings yet
- Monarchy in MalaysiaDocument5 pagesMonarchy in Malaysiafancy_maskNo ratings yet
- PIC Assembly Launguge RefferenceDocument27 pagesPIC Assembly Launguge Refferencekishore435No ratings yet
- Matlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. OverviewDocument4 pagesMatlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. Overviewfancy_maskNo ratings yet
- Linear Versus Switching Power SupplyDocument3 pagesLinear Versus Switching Power Supplyfancy_maskNo ratings yet
- PIC Assembly Language For The PDFDocument34 pagesPIC Assembly Language For The PDFfancy_mask100% (3)
- UTM Thesis Manual 2007Document70 pagesUTM Thesis Manual 2007Muhammad Bin KamarulaziziNo ratings yet
- Plagiarism: Dr. Shamsuddin ShahidDocument21 pagesPlagiarism: Dr. Shamsuddin Shahidfancy_maskNo ratings yet
- MybotDocument1 pageMybotfancy_maskNo ratings yet
- Universal Capacitive Sensors and Transducers InterfaceDocument4 pagesUniversal Capacitive Sensors and Transducers Interfacefancy_maskNo ratings yet
- The Du'Aa Is The Weapon of The BelieverDocument32 pagesThe Du'Aa Is The Weapon of The Believerfancy_maskNo ratings yet
- Omar Ahmad Abdel Aziz Mashaal Paper For Opt Comm CourseDocument8 pagesOmar Ahmad Abdel Aziz Mashaal Paper For Opt Comm Coursefancy_maskNo ratings yet
- Lam But 1Document1 pageLam But 1fancy_maskNo ratings yet
- DemodulatorsDocument2 pagesDemodulatorskhalidNo ratings yet
- Mercury Pollution A Threat To Agusan MarshDocument25 pagesMercury Pollution A Threat To Agusan MarshKalambuan Foundation, Inc.50% (4)
- Unit3 (Ac Drives)Document20 pagesUnit3 (Ac Drives)vedala chaitanyaNo ratings yet
- Construcion Material CalibraitonDocument14 pagesConstrucion Material CalibraitonDoulat RamNo ratings yet
- MAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015Document7 pagesMAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015udhayNo ratings yet
- RFPO55 G.8263: SpecificationsDocument5 pagesRFPO55 G.8263: SpecificationsullascsNo ratings yet
- Yield Management and ForecastingDocument23 pagesYield Management and ForecastingMandeep KaurNo ratings yet
- Measures of AverageDocument7 pagesMeasures of AveragemomathtchrNo ratings yet
- Landslides and Engineered Slopes - Chen 2008 PDFDocument2,170 pagesLandslides and Engineered Slopes - Chen 2008 PDFLupu Daniel100% (2)
- The Reactivity Series PDFDocument33 pagesThe Reactivity Series PDFSandipan Chakraborty100% (1)
- DC Characteristics of A MOS Transistor (MOSFET) : Created in COMSOL Multiphysics 5.3Document20 pagesDC Characteristics of A MOS Transistor (MOSFET) : Created in COMSOL Multiphysics 5.3Anika TabassumNo ratings yet
- Evolution of Mobile Base Station ArchitecturesDocument6 pagesEvolution of Mobile Base Station ArchitecturesShivganesh SomasundaramNo ratings yet
- Exact Analytical Solutions of The Parameters of Real Solar Cells Using Lambert W-FunctionDocument9 pagesExact Analytical Solutions of The Parameters of Real Solar Cells Using Lambert W-FunctionAristide ShalomNo ratings yet
- 25 L SUPER Reflux Still Ins With Z FilterDocument16 pages25 L SUPER Reflux Still Ins With Z FiltertoffeloffeNo ratings yet
- Computer Fundamental IndiaBixDocument162 pagesComputer Fundamental IndiaBixNa Thaka83% (6)
- Determination of Egg Yolk Content in Egg Liqueurs: Queurs. Czech J. Food Sci., 22: 9-15Document7 pagesDetermination of Egg Yolk Content in Egg Liqueurs: Queurs. Czech J. Food Sci., 22: 9-15ghost2011No ratings yet
- Sheet 1Document2 pagesSheet 1Amany SobhyNo ratings yet
- Tangents and Normal: IIT JEE (Main) ExaminationDocument18 pagesTangents and Normal: IIT JEE (Main) ExaminationHanuman VermaNo ratings yet
- Why Python For GISDocument3 pagesWhy Python For GISalebeley21No ratings yet
- EEE312 - Midterm Exam - Part 1 - Google FormsDocument4 pagesEEE312 - Midterm Exam - Part 1 - Google FormsDavid Louie BediaNo ratings yet
- Kiln Operation Basics: Pyroprocessing 1Document56 pagesKiln Operation Basics: Pyroprocessing 1mustafNo ratings yet
- Ice 3Document9 pagesIce 3Gabriel CortesNo ratings yet
- Structural Beam Deflection CalculationDocument36 pagesStructural Beam Deflection CalculationjaamartinezNo ratings yet
- Sweater Consumption CostingDocument2 pagesSweater Consumption Costingapi-214283679No ratings yet
- Fire Magic 2019 Catalog PDFDocument56 pagesFire Magic 2019 Catalog PDFgallegos7386No ratings yet
- A Gentle Introduction To K-Fold Cross-ValidationDocument69 pagesA Gentle Introduction To K-Fold Cross-ValidationAzeddine RamziNo ratings yet
- SKF Single Plane Graphical Balancing Tutorial ENDocument13 pagesSKF Single Plane Graphical Balancing Tutorial ENVili KamenovaNo ratings yet
- Simple HTTP Client for Reading RSS Feeds on MobileDocument6 pagesSimple HTTP Client for Reading RSS Feeds on MobileMarcel LefterNo ratings yet
- Past Papers CXC MathsDocument77 pagesPast Papers CXC MathsShanice Henry96% (27)
- Homework Set No. 8: 1. Simplest Problem Using Least Squares MethodDocument3 pagesHomework Set No. 8: 1. Simplest Problem Using Least Squares MethodkelbmutsNo ratings yet