You might also like
- Tema: Gas NaturalDocument1 pageTema: Gas NaturalElmer Garcia AllccahuamanNo ratings yet
- Politica Actual PeruanaDocument2 pagesPolitica Actual PeruanaElmer Garcia AllccahuamanNo ratings yet
- Politicas de Desarrollo NacionalDocument55 pagesPoliticas de Desarrollo NacionalElmer Garcia AllccahuamanNo ratings yet
- La Toma de Decisiones en Condiciones de CertezaDocument17 pagesLa Toma de Decisiones en Condiciones de CertezaElmer Garcia AllccahuamanNo ratings yet
- Ejercicios Resueltos EstadisticaDocument104 pagesEjercicios Resueltos EstadisticaJavier Ladino33% (3)
- Marcus Lemonis salva Eco-me de la quiebra con cambios en personal, procesos y productoDocument42 pagesMarcus Lemonis salva Eco-me de la quiebra con cambios en personal, procesos y productoElmer Garcia Allccahuaman40% (5)
- U6 Diagrama de ForesterDocument18 pagesU6 Diagrama de ForesterElmer Garcia Allccahuaman100% (1)
- Simulacro Sistemas OperativosDocument3 pagesSimulacro Sistemas OperativosElmer Garcia AllccahuamanNo ratings yet
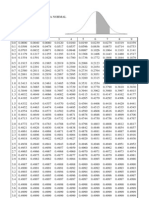
- Areas Bajo La Curva NormallDocument1 pageAreas Bajo La Curva NormallManuel RivNo ratings yet
- Mecanica de FluidosDocument11 pagesMecanica de FluidosElmer Garcia AllccahuamanNo ratings yet
- Alejandro Sulbaran Radiacion TermicaDocument19 pagesAlejandro Sulbaran Radiacion TermicaAlejandro SulbaranNo ratings yet
- Procedimiento Medicion de Voltaje en InterruptoresDocument3 pagesProcedimiento Medicion de Voltaje en InterruptoresAgueda Herrera EscobedoNo ratings yet
- Electromagnetic ADocument8 pagesElectromagnetic Ajuan camiloNo ratings yet
- Potencia InformesDocument8 pagesPotencia InformesDiego Melendrez NagasakiNo ratings yet
- CEO-GTO40-ISA-EM-DOC-001 Criterios Basico de Diseño ElectromecanicoDocument22 pagesCEO-GTO40-ISA-EM-DOC-001 Criterios Basico de Diseño Electromecanicofreyde alvarez vasquezNo ratings yet
- Jhonny 12Document62 pagesJhonny 12Miguel Angel Sejas VillarroelNo ratings yet
- Primer Examen Parcial2021 - Revisión Del IntentoDocument8 pagesPrimer Examen Parcial2021 - Revisión Del IntentoNATHALIA GONZÁLEZ ARRIAZANo ratings yet
- Capacitancia Dependiente de Sus Dimensiones GeométricasDocument13 pagesCapacitancia Dependiente de Sus Dimensiones GeométricasMichhael Paredes75% (4)
- Servos y pasosDocument10 pagesServos y pasossilvestreNo ratings yet
- AE TapiaZarateLuisAlberto 1E8 ACT.03 22-2Document11 pagesAE TapiaZarateLuisAlberto 1E8 ACT.03 22-2Luis TapiaNo ratings yet
- Capitulo IV SP1 2018Document49 pagesCapitulo IV SP1 2018Fredy Alexis Salas VelasquezNo ratings yet
- Campo MagnéticoDocument15 pagesCampo MagnéticoDanielChoquePereyraNo ratings yet
- Guía N.3 Unidad 3. Electricidad VivaDocument26 pagesGuía N.3 Unidad 3. Electricidad VivaZaidy SantamariaNo ratings yet
- Listado de Documentos AeaDocument5 pagesListado de Documentos AeaDanielNo ratings yet
- Física IIDocument6 pagesFísica IIJuany SalazarNo ratings yet
- Grupos ElectrógenosDocument19 pagesGrupos ElectrógenosKatherine PIlgrinNo ratings yet
- Diseño de Una Linea de TransmisiónDocument2 pagesDiseño de Una Linea de TransmisiónAlberto OrdoñezNo ratings yet
- Documentos Adjuntos para Tramites en La Municipalidad Satch - ChiclayoDocument8 pagesDocumentos Adjuntos para Tramites en La Municipalidad Satch - ChiclayoJohn Edwards Lecca BernillaNo ratings yet
- Sistemas de Prueba Automatizados para Transformadores de DistribuciónDocument17 pagesSistemas de Prueba Automatizados para Transformadores de DistribuciónDa VidNo ratings yet
- Potencia en CADocument11 pagesPotencia en CALuis JaramilloNo ratings yet
- Ciencias II Física InteraccionesDocument11 pagesCiencias II Física InteraccionesSalomon TorresNo ratings yet
- Centros de CargaDocument7 pagesCentros de Cargaisrael peñaNo ratings yet
- Circuitos en EstrellaDocument7 pagesCircuitos en EstrellaHARLYN MILENA LONDONO JIMENEZNo ratings yet
- Circuitos TTL y CMOSDocument4 pagesCircuitos TTL y CMOSElias CVNo ratings yet
- HT ADocument5 pagesHT ATania YNo ratings yet
- Practica 1 ReporteDocument11 pagesPractica 1 ReporteJuan Uriel VeraNo ratings yet
- Practicas Medicion y Control de Movimiento Electronica Industrial PDFDocument32 pagesPracticas Medicion y Control de Movimiento Electronica Industrial PDFAnonymous UdyvGlT8mNo ratings yet
- Copia de P1 Lab Fisica3Document21 pagesCopia de P1 Lab Fisica3Gabriel Sanchez JerezNo ratings yet
- MEC - I - D - TALLER - Introduccion ElectricidadDocument4 pagesMEC - I - D - TALLER - Introduccion Electricidadstiven GaitanNo ratings yet
- Catalogo de Contactores de Abb PDFDocument58 pagesCatalogo de Contactores de Abb PDFFernando Taipe'xNo ratings yet