You might also like
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukNo ratings yet
- WS2801 3-Channel LED DriverDocument15 pagesWS2801 3-Channel LED DriverWanderley SenaNo ratings yet
- Reversible Motor Driver: BA6209 / BA6209NDocument8 pagesReversible Motor Driver: BA6209 / BA6209NLaurentiu IacobNo ratings yet
- BA6209Document9 pagesBA6209sontuyet82No ratings yet
- MC1455Document13 pagesMC1455eduardolsNo ratings yet
- Data Sheet: IC Timers 555 and 556Document8 pagesData Sheet: IC Timers 555 and 556Adenilson MatiasNo ratings yet
- Lm555 555c TimerDocument12 pagesLm555 555c TimerAlexis Orellana VediaNo ratings yet
- Mc1455-d Timer IcDocument11 pagesMc1455-d Timer IcDecker JamesNo ratings yet
- BDocument46 pagesBemmanueel2No ratings yet
- 220v DC Motor Speed Control Using Ic RegulatorDocument14 pages220v DC Motor Speed Control Using Ic RegulatorZagorchilloNo ratings yet
- MC34063AMDocument16 pagesMC34063AMSajjad4434No ratings yet
- Pic16f72 3 Phase Motor ControlDocument18 pagesPic16f72 3 Phase Motor ControlMatias BerriosNo ratings yet
- Ca 3524Document20 pagesCa 3524rmsharma1970No ratings yet
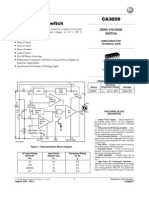
- CA3059Document9 pagesCA3059chinametalNo ratings yet
- SM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsDocument10 pagesSM72441 Programmable Maximum Power Point Tracking Controller For Photovoltaic Solar PanelsShahid SiddiqueNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- LM555 Timer: General Description FeaturesDocument12 pagesLM555 Timer: General Description FeaturesMark J A. OkyoNo ratings yet
- Determine regulation and efficiency of transformer using OC and SC testsDocument45 pagesDetermine regulation and efficiency of transformer using OC and SC testsrkadiraj701150% (4)
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- Lt8490 - High Efficiency MPPT Battery Charger ControllerDocument8 pagesLt8490 - High Efficiency MPPT Battery Charger ControllerAmador Garcia IIINo ratings yet
- A3930 1 Datasheet PDFDocument21 pagesA3930 1 Datasheet PDFKaan GünayNo ratings yet
- Design Guideline For Flyback Charger Using FAN302HL/ULDocument20 pagesDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoNo ratings yet
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
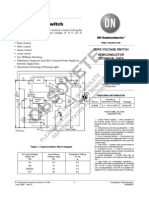
- Semiconductor Technical Data Zero Voltage SwitchDocument6 pagesSemiconductor Technical Data Zero Voltage SwitchMuresan SanduNo ratings yet
- Datasheet WS2801Document15 pagesDatasheet WS2801Nguyễn Trọng NghĩaNo ratings yet
- UC3843 DatasheetDocument13 pagesUC3843 DatasheetBigbrain99No ratings yet
- UC3845Document13 pagesUC3845roozbehxoxNo ratings yet
- And8328 DDocument8 pagesAnd8328 DJonatan LunaNo ratings yet
- LM555 Timer: Literature Number: SNAS548BDocument14 pagesLM555 Timer: Literature Number: SNAS548BKenly WallNo ratings yet
- MC3423 DDocument10 pagesMC3423 DBryan PittmanNo ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- At 30 IcDocument9 pagesAt 30 IcCristina AntohiNo ratings yet
- PCA82C250Document18 pagesPCA82C250Dario GomezNo ratings yet
- UC3842 Inside SchematicsDocument17 pagesUC3842 Inside Schematicsp.c100% (1)
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- The Phase Control Circuit The TC787Document10 pagesThe Phase Control Circuit The TC787nansusanNo ratings yet
- DatasheetDocument9 pagesDatasheetnipunkhatriNo ratings yet
- Datasheet T2117Document16 pagesDatasheet T2117Radovan RasaNo ratings yet
- Sla7024m (Motor Driver)Document13 pagesSla7024m (Motor Driver)Franklin Miranda RoblesNo ratings yet
- MW Inverter IC RM6203Document7 pagesMW Inverter IC RM6203KybernetikumNo ratings yet
- Tda 4601Document8 pagesTda 4601Mirko AleksicNo ratings yet
- MC34063A, MC33063A, NCV33063A 1.5 A, Step Up/Down/ Inverting Switching RegulatorsDocument14 pagesMC34063A, MC33063A, NCV33063A 1.5 A, Step Up/Down/ Inverting Switching RegulatorsVũ TưởngNo ratings yet
- Phone Charger SchematicDocument6 pagesPhone Charger Schematicyudi_sibaraniNo ratings yet
- HV Floating MOS-Gate Driver ICs Application NoteDocument24 pagesHV Floating MOS-Gate Driver ICs Application NoteEdy AchalmaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- It's Interesting To Stop and Think About The Actual Size of A WorksheetDocument1 pageIt's Interesting To Stop and Think About The Actual Size of A WorksheetKevin StrongNo ratings yet
- Scripts de Formularios 01Document4 pagesScripts de Formularios 01Kevin StrongNo ratings yet
- Scripts de Formularios 01Document4 pagesScripts de Formularios 01Kevin StrongNo ratings yet
- Giving It A Snappy and Responsive Feel That Was Unusual For The TimeDocument2 pagesGiving It A Snappy and Responsive Feel That Was Unusual For The TimeKevin StrongNo ratings yet
- The Evolution of Excel from MultiPlan to Today's Popular Spreadsheet SoftwareDocument1 pageThe Evolution of Excel from MultiPlan to Today's Popular Spreadsheet SoftwareKevin StrongNo ratings yet
- In Early 1997 Microsoft Released Office 97 Which Included Excel 97Document2 pagesIn Early 1997 Microsoft Released Office 97 Which Included Excel 97Kevin StrongNo ratings yet
- Controlling Objects Is Fundamental To Developing ApplicationsDocument1 pageControlling Objects Is Fundamental To Developing ApplicationsKevin StrongNo ratings yet
- It Did Not Have A Graphical User Interface GUIDocument2 pagesIt Did Not Have A Graphical User Interface GUIKevin StrongNo ratings yet
- Referring To CommandBarsDocument2 pagesReferring To CommandBarsKevin StrongNo ratings yet
- Part VIII Appendixes Appendix A Excel Resources OnlineDocument2 pagesPart VIII Appendixes Appendix A Excel Resources OnlineKevin StrongNo ratings yet
- When The IBM PC Arrived On The Scene in 1981Document1 pageWhen The IBM PC Arrived On The Scene in 1981Kevin StrongNo ratings yet
- Chapter 29 Understanding Class ModulesDocument2 pagesChapter 29 Understanding Class ModulesKevin StrongNo ratings yet
- Excel 2010 Where It Came From in This ChapterDocument1 pageExcel 2010 Where It Came From in This ChapterKevin StrongNo ratings yet
- Too Little Too LateDocument2 pagesToo Little Too LateKevin StrongNo ratings yet
- Entering Event-Handler CodeDocument2 pagesEntering Event-Handler CodeKevin StrongNo ratings yet
- Chapter 18 Working With ChartsDocument2 pagesChapter 18 Working With ChartsKevin StrongNo ratings yet
- Creating A User Help SystemDocument2 pagesCreating A User Help SystemKevin StrongNo ratings yet
- Excel 2010 Where It Came FromDocument2 pagesExcel 2010 Where It Came FromKevin StrongNo ratings yet
- Simulating A Toolbar With A UserFormDocument2 pagesSimulating A Toolbar With A UserFormKevin StrongNo ratings yet
- Customizing The ToolboxDocument2 pagesCustomizing The ToolboxKevin StrongNo ratings yet
- B57UDIAGDocument18 pagesB57UDIAGtr317No ratings yet
- Displaying The Date and TimeDocument2 pagesDisplaying The Date and TimeKevin StrongNo ratings yet
- A Function That Returns An Error ValueDocument2 pagesA Function That Returns An Error ValueKevin StrongNo ratings yet
- Simulating A Toolbar With A UserFormDocument2 pagesSimulating A Toolbar With A UserFormKevin StrongNo ratings yet
- Displaying A Data FormDocument2 pagesDisplaying A Data FormKevin StrongNo ratings yet
- The Comment Object A Case StudyDocument2 pagesThe Comment Object A Case StudyKevin StrongNo ratings yet
- Excel® 2010 Power Programming With VBA: Contents at A GlanceDocument2 pagesExcel® 2010 Power Programming With VBA: Contents at A GlanceKevin StrongNo ratings yet
- btw6 2 0 9450-9600releasenotesDocument11 pagesbtw6 2 0 9450-9600releasenotesjetzon2005No ratings yet
- Executing Sub ProceduresDocument2 pagesExecuting Sub ProceduresKevin StrongNo ratings yet
- Inside An Excel FileDocument2 pagesInside An Excel FileKevin StrongNo ratings yet
- Honda GX 670 Propane Engine Ws Repair Manual 13zn10e4Document20 pagesHonda GX 670 Propane Engine Ws Repair Manual 13zn10e4annette100% (48)
- Sensor de Toner Ts0524lbDocument5 pagesSensor de Toner Ts0524lbjaag93No ratings yet
- Unit 4Document7 pagesUnit 4binukirubaNo ratings yet
- Laboratory Activity #6Document3 pagesLaboratory Activity #6Jan Andrea Salicobay HermosoNo ratings yet
- Understanding PC and TroubleshootingDocument8 pagesUnderstanding PC and TroubleshootingDemon God100% (1)
- Cylindrical Roller Bearings - 2 PDFDocument52 pagesCylindrical Roller Bearings - 2 PDFcristinelbNo ratings yet
- Approval Drawing Control Valve For Fire Line - KORVAL DATA SHEETDocument5 pagesApproval Drawing Control Valve For Fire Line - KORVAL DATA SHEETMusholla BaiturrahimNo ratings yet
- enDocument31 pagesenRegistr Registr100% (4)
- 1SCA022798R0730 Ot600u03 Switch DisconnectorDocument3 pages1SCA022798R0730 Ot600u03 Switch Disconnectorsdk00No ratings yet
- SYNCHRONOUS MOTOR PRINCIPLESDocument21 pagesSYNCHRONOUS MOTOR PRINCIPLEStesfuNo ratings yet
- New Pass4itsure Cisco 300-165 Dumps PDF - DCII Implementing Cisco Data Center Infrastructure (DCII)Document10 pagesNew Pass4itsure Cisco 300-165 Dumps PDF - DCII Implementing Cisco Data Center Infrastructure (DCII)Jennifer L. SmithNo ratings yet
- Electro 3 PrefinalsDocument5 pagesElectro 3 PrefinalsJuan Miguel TorresNo ratings yet
- EVLQ-CV3, EHYHBH-AV32, EHYHBX-AV3, EHYKOMB-AA - Installer Reference Guide - 4PEN355634-1F - English-1Document252 pagesEVLQ-CV3, EHYHBH-AV32, EHYHBX-AV3, EHYKOMB-AA - Installer Reference Guide - 4PEN355634-1F - English-1Chris BrauchliNo ratings yet
- MCP 9700EDocument18 pagesMCP 9700ESebastian Robles CardonaNo ratings yet
- Current Differential Relay ManualDocument4 pagesCurrent Differential Relay Manualppraveenkumar79No ratings yet
- PRS NCO3 Data Sheet EnUS 11145053835Document4 pagesPRS NCO3 Data Sheet EnUS 11145053835Rio DwirahayuNo ratings yet
- CRJ Pre - After Flight ChecklistDocument4 pagesCRJ Pre - After Flight ChecklistCHIMONo ratings yet
- Twido - Programmable Controller - TWDLMDA20DTK PDFDocument9 pagesTwido - Programmable Controller - TWDLMDA20DTK PDFyuda pramudhyaNo ratings yet
- Pspice Fet CurvesDocument7 pagesPspice Fet CurvesBadsector CkNo ratings yet
- Manual Obs Ol4 PDFDocument76 pagesManual Obs Ol4 PDFCarlos Revilla FloresNo ratings yet
- FGH40N60Document9 pagesFGH40N60Roger FollanoNo ratings yet
- Intorduction Blow by Tool PDFDocument10 pagesIntorduction Blow by Tool PDFNopNo ratings yet
- VR505ADocument3 pagesVR505ATung Bui ThanhNo ratings yet
- Compact NSX250H 250A 3-Pole Circuit BreakerDocument2 pagesCompact NSX250H 250A 3-Pole Circuit BreakerjoaoNo ratings yet
- Service Manual: TA-DX8Document14 pagesService Manual: TA-DX8Eliel ToledoNo ratings yet
- TransformerDocument25 pagesTransformerJerald SagusayNo ratings yet
- DS20424sanyo PDFDocument26 pagesDS20424sanyo PDFdwi aryantoNo ratings yet
- AEG Electric Motors Mechanical Design and Technical SpecificationsDocument13 pagesAEG Electric Motors Mechanical Design and Technical SpecificationsJosé Eduardo Gaete DuarteNo ratings yet
- Control SystemsDocument105 pagesControl SystemsMuchammad Dicky Ubaidilah muchammaddicky.2018No ratings yet
- Catalog 853 SeriesDocument60 pagesCatalog 853 SeriesMohamed BourichaNo ratings yet