You might also like
- VC AndrewsDocument3 pagesVC AndrewsLesa O'Leary100% (1)
- AP Calc AB/BC Review SheetDocument2 pagesAP Calc AB/BC Review Sheetmhayolo69100% (1)
- Homework SolDocument7 pagesHomework SolLoong Cheng NingNo ratings yet
- Mth603 FormulaeDocument5 pagesMth603 FormulaeAmir Saleem33% (3)
- MTH101 Practice Qs Solutions Lectures 23 To 45Document27 pagesMTH101 Practice Qs Solutions Lectures 23 To 45Abdul Rafay86% (7)
- Roots of Equations: Numerical Methods For Civil EngineersDocument21 pagesRoots of Equations: Numerical Methods For Civil EngineersRibesha MushNo ratings yet
- Detailed Solutions A-07 JUNE 2003: I X X F F IDocument32 pagesDetailed Solutions A-07 JUNE 2003: I X X F F IAdzLinkBalaoangNo ratings yet
- Multivariable Calculus, 2009-10-30. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 pagesMultivariable Calculus, 2009-10-30. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4No ratings yet
- Interpolation and Approximation TheoryDocument15 pagesInterpolation and Approximation TheoryFaisal RahmanNo ratings yet
- Formula Rio CNDocument5 pagesFormula Rio CNJoão OliveiraNo ratings yet
- Formula Rio CNDocument7 pagesFormula Rio CNJoana Alves QuitérioNo ratings yet
- Multivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 pagesMultivariable Calculus, 2007-03-15. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4No ratings yet
- FormulaeDocument2 pagesFormulaeMahatama Sharan PandeyNo ratings yet
- Calculus 1 List of ExercisesDocument8 pagesCalculus 1 List of Exercisesp1tru1mariusNo ratings yet
- Formula Rio CNDocument6 pagesFormula Rio CNFabio Miguel RodriguesNo ratings yet
- Exam - 2013 10 30Document5 pagesExam - 2013 10 30lieth-4No ratings yet
- SelectionDocument15 pagesSelectionMuhammad KamranNo ratings yet
- Multivariable Calculus, 2007-10-26. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 pagesMultivariable Calculus, 2007-10-26. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4No ratings yet
- Polynomial Interpolation Piecewise Polynomial Interpolation: J J J J JDocument2 pagesPolynomial Interpolation Piecewise Polynomial Interpolation: J J J J JPH2303327No ratings yet
- 2024S 2014a MT1v1 - Sample MT 1Document5 pages2024S 2014a MT1v1 - Sample MT 1Takhir TashmatovNo ratings yet
- (A) If F (X) and G (X) Have Period P, Show That H (X) Af (X) + BG (X) (A, B, Constant)Document15 pages(A) If F (X) and G (X) Have Period P, Show That H (X) Af (X) + BG (X) (A, B, Constant)Heather JohnsonNo ratings yet
- Math ReferenceDocument24 pagesMath ReferenceSujib BarmanNo ratings yet
- Interpolation and ApproximationDocument8 pagesInterpolation and ApproximationHind Abu GhazlehNo ratings yet
- Calculation of Value of Pi Using Monte-Carlo MethodDocument54 pagesCalculation of Value of Pi Using Monte-Carlo MethodShihabudheenNo ratings yet
- IntegralsDocument27 pagesIntegralssudersanaviswanathanNo ratings yet
- CH2. Locating Roots of Nonlinear EquationsDocument17 pagesCH2. Locating Roots of Nonlinear Equationsbytebuilder25No ratings yet
- Leep 207Document27 pagesLeep 207Koyal GuptaNo ratings yet
- R x f ξ n+1 ! x−x: Taylorov red (Mac Laurinov red)Document13 pagesR x f ξ n+1 ! x−x: Taylorov red (Mac Laurinov red)Hinko FušNo ratings yet
- Function Approximation, Interpolation, and Curve Fitting PDFDocument53 pagesFunction Approximation, Interpolation, and Curve Fitting PDFMikhail Tabucal100% (1)
- Exam - 2012 10 30Document5 pagesExam - 2012 10 30lieth-4No ratings yet
- Universiti Tunku Abdul Rahman Faculty of Science: Lim Xue Qi 16ADB03823 Loo Xin Yi 16ADB04027Document19 pagesUniversiti Tunku Abdul Rahman Faculty of Science: Lim Xue Qi 16ADB03823 Loo Xin Yi 16ADB04027Yew Wen KhangNo ratings yet
- Function Approximation, Interpolation, and Curve FittingDocument53 pagesFunction Approximation, Interpolation, and Curve FittingAlexis Bryan RiveraNo ratings yet
- Fourier Finite TransformsDocument8 pagesFourier Finite Transformserev_20No ratings yet
- NMO SPPU TE Mechanical All Programs With SolverDocument23 pagesNMO SPPU TE Mechanical All Programs With SolverVivek SaahilNo ratings yet
- Lec 13 Newton Raphson MethodDocument30 pagesLec 13 Newton Raphson MethodMuhammad Bilal Junaid100% (1)
- Exam - 2011 10 28Document5 pagesExam - 2011 10 28lieth-4No ratings yet
- M-Tech 1 Year Cace Lab Computational LabDocument41 pagesM-Tech 1 Year Cace Lab Computational LabGowri ShankarNo ratings yet
- Coplex Number FormulasDocument7 pagesCoplex Number FormulasMohan KhedkarNo ratings yet
- Problems by Jim Pitman. Solutions by George ChenDocument8 pagesProblems by Jim Pitman. Solutions by George ChenspitzersglareNo ratings yet
- Multivariable Calculus, 2008-10-31. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526Document5 pagesMultivariable Calculus, 2008-10-31. Per-Sverre Svendsen, Tel.035 - 167 615/0709 - 398 526lieth-4No ratings yet
- Y MX B: Linearization and Newton's MethodDocument7 pagesY MX B: Linearization and Newton's MethodTony CaoNo ratings yet
- Numerical MethodsDocument18 pagesNumerical MethodsAbed MasaudNo ratings yet
- UPSC Civil Services Main 1990 - Mathematics Calculus: Sunder LalDocument10 pagesUPSC Civil Services Main 1990 - Mathematics Calculus: Sunder Lalsayhigaurav07No ratings yet
- Sangap - Solusi (6,13,20,27,34,41,48,55)Document9 pagesSangap - Solusi (6,13,20,27,34,41,48,55)J Esa AditiyaNo ratings yet
- Solutions To Exercises 7.1: X Has Period TDocument16 pagesSolutions To Exercises 7.1: X Has Period TTri Phương NguyễnNo ratings yet
- International Competition in Mathematics For Universtiy Students in Plovdiv, Bulgaria 1995Document11 pagesInternational Competition in Mathematics For Universtiy Students in Plovdiv, Bulgaria 1995Phúc Hảo ĐỗNo ratings yet
- 209 Formula SheetDocument4 pages209 Formula SheetAlan ChoyNo ratings yet
- Math 105 Practice Exam 3 SolutionsDocument3 pagesMath 105 Practice Exam 3 SolutionsexamkillerNo ratings yet
- Mathematics TDocument62 pagesMathematics TRosdy Dyingdemon100% (1)
- MTL107 MAL230 Problem Sheet 1Document4 pagesMTL107 MAL230 Problem Sheet 1Pankhuri KumariNo ratings yet
- Numerical Analysis - MTH603 Handouts Lecture 21Document5 pagesNumerical Analysis - MTH603 Handouts Lecture 21roshanpateliaNo ratings yet
- Definite Integration Theory - eDocument21 pagesDefinite Integration Theory - ethinkiitNo ratings yet
- Numerical AnalysisDocument8 pagesNumerical Analysisamir nabilNo ratings yet
- AssignmentDocument5 pagesAssignmentAnik AhamedNo ratings yet
- Problem Set 7 Solutions PDFDocument33 pagesProblem Set 7 Solutions PDFfrancis_tsk1No ratings yet
- Predictor Corrector MethodDocument5 pagesPredictor Corrector Methodlazarbaruch3033No ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Iso 17874 2 2004Document15 pagesIso 17874 2 2004fahadkhanffcNo ratings yet
- Iso 17874 3 2011 en PDFDocument11 pagesIso 17874 3 2011 en PDFfahadkhanffcNo ratings yet
- S Sstovaunz 19Document4 pagesS Sstovaunz 19fahadkhanffcNo ratings yet
- Manuscript No 3, Final Gally Proof of 11708 (Muhammad Zakria Butt)Document12 pagesManuscript No 3, Final Gally Proof of 11708 (Muhammad Zakria Butt)fahadkhanffcNo ratings yet
- Gauntlet System For Master9S.Lave Manipulators: Savannah Riuer AboratorDocument11 pagesGauntlet System For Master9S.Lave Manipulators: Savannah Riuer AboratorfahadkhanffcNo ratings yet
- Iso 17874 1 2010 en PDFDocument11 pagesIso 17874 1 2010 en PDFfahadkhanffcNo ratings yet
- Fits Si Tables Ansi b4.2-1978 r1994 1Document11 pagesFits Si Tables Ansi b4.2-1978 r1994 1fahadkhanffcNo ratings yet
- Key BoardsDocument6 pagesKey BoardsBadrulHaqueRahmaniNo ratings yet
- Analysis of The Effects of Process Parameters On Exit Burrs in Drilling Using A Combined Simulation and Experimental ApproachDocument11 pagesAnalysis of The Effects of Process Parameters On Exit Burrs in Drilling Using A Combined Simulation and Experimental ApproachfahadkhanffcNo ratings yet
- Federal Public Service CommissionDocument2 pagesFederal Public Service CommissionfahadkhanffcNo ratings yet
- Test Dates: Saturday 14th & Sunday 15th, April 2018Document1 pageTest Dates: Saturday 14th & Sunday 15th, April 2018fahadkhanffcNo ratings yet
- Exclusive Ramadan DealsDocument6 pagesExclusive Ramadan DealsfahadkhanffcNo ratings yet
- The Pathan (Pashto) by Khan Abdul Ghani Khan (WWW - Kitaboona.blogspot - Com) .PDF TextDocument99 pagesThe Pathan (Pashto) by Khan Abdul Ghani Khan (WWW - Kitaboona.blogspot - Com) .PDF Textfahadkhanffc100% (1)
- EXPRESS Data ModelingDocument16 pagesEXPRESS Data Modelingfahadkhanffc100% (1)
- NUST School of Mechanical & Manufacturing Engineering (SMME) Postgraduate Programme Date Sheet ESE (Spring 2016 Semester)Document1 pageNUST School of Mechanical & Manufacturing Engineering (SMME) Postgraduate Programme Date Sheet ESE (Spring 2016 Semester)fahadkhanffcNo ratings yet
- Flow Chart of IT FrameworkDocument1 pageFlow Chart of IT FrameworkfahadkhanffcNo ratings yet
- Quotation PAEC With Out TaxDocument4 pagesQuotation PAEC With Out TaxfahadkhanffcNo ratings yet
- Finish Cut On Working Surface Drilling Holes in PatternDocument2 pagesFinish Cut On Working Surface Drilling Holes in PatternfahadkhanffcNo ratings yet
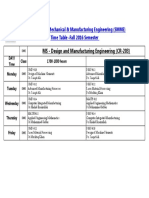
- NUST School of Mechanical & Manufacturing Engineering (SMME) Time Table - Fall 2016 SemesterDocument1 pageNUST School of Mechanical & Manufacturing Engineering (SMME) Time Table - Fall 2016 SemesterfahadkhanffcNo ratings yet
- Mindray PM 9000 User ID10240 PDFDocument378 pagesMindray PM 9000 User ID10240 PDFJuan FernandoNo ratings yet
- Islamiyat ProjectDocument21 pagesIslamiyat ProjectSubhan Khan NiaziNo ratings yet
- ANS145 - Beef Cattle ProductionDocument52 pagesANS145 - Beef Cattle ProductionEgie BulawinNo ratings yet
- English 2nd Quarter Week 7 Connotation DenotationDocument28 pagesEnglish 2nd Quarter Week 7 Connotation DenotationEdward Estrella GuceNo ratings yet
- Strategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojDocument5 pagesStrategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojSwetaSarojNo ratings yet
- Design and Optimization of A Medium Altitude Long Endurance UAV Wingbox StructureDocument8 pagesDesign and Optimization of A Medium Altitude Long Endurance UAV Wingbox StructureamirNo ratings yet
- ISO-3046-4-2009 (Gobernador de Velocidad)Document8 pagesISO-3046-4-2009 (Gobernador de Velocidad)David GastelumNo ratings yet
- A2 UNIT 5 Culture Teacher's NotesDocument1 pageA2 UNIT 5 Culture Teacher's NotesCarolinaNo ratings yet
- AMO Exercise 1Document2 pagesAMO Exercise 1Jonell Chan Xin RuNo ratings yet
- LYNX 40 Drilling Mud DecanterDocument2 pagesLYNX 40 Drilling Mud DecanterPierluigi Ciampiconi0% (1)
- Yarn HairinessDocument9 pagesYarn HairinessGhandi AhmadNo ratings yet
- Autodesk Nastran In-CAD PDFDocument43 pagesAutodesk Nastran In-CAD PDFFernando0% (1)
- CUET 2022 General Test 6th October Shift 1Document23 pagesCUET 2022 General Test 6th October Shift 1Dhruv BhardwajNo ratings yet
- Sodexo GermanyDocument13 pagesSodexo GermanySandeep Kumar AgrawalNo ratings yet
- Nyamango Site Meeting 9 ReportDocument18 pagesNyamango Site Meeting 9 ReportMbayo David GodfreyNo ratings yet
- FKTDocument32 pagesFKTNeeraj SharmaNo ratings yet
- Individual Daily Log and Accomplishment Report: Date and Actual Time Logs Actual AccomplishmentsDocument3 pagesIndividual Daily Log and Accomplishment Report: Date and Actual Time Logs Actual AccomplishmentsMarian SalazarNo ratings yet
- Chapter 13Document15 pagesChapter 13anormal08No ratings yet
- SAED90DR Rev1 2 21.01.2011Document24 pagesSAED90DR Rev1 2 21.01.2011Cherry AbhiNo ratings yet
- A Process Reference Model For Claims Management in Construction Supply Chains The Contractors PerspectiveDocument20 pagesA Process Reference Model For Claims Management in Construction Supply Chains The Contractors Perspectivejadal khanNo ratings yet
- Thesis On Retail Management of The Brand 'Sleepwell'Document62 pagesThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- Epistemology and OntologyDocument6 pagesEpistemology and OntologyPriyankaNo ratings yet
- Jota - EtchDocument3 pagesJota - EtchRidwan BaharumNo ratings yet
- Assignment RoadDocument14 pagesAssignment RoadEsya ImanNo ratings yet
- Abbas Ali Mandviwala 200640147: Ba1530: Information Systems and Organization StudiesDocument11 pagesAbbas Ali Mandviwala 200640147: Ba1530: Information Systems and Organization Studiesshayan sohailNo ratings yet
- The Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFDocument9 pagesThe Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFYan XiongNo ratings yet
- Mangement of Shipping CompaniesDocument20 pagesMangement of Shipping CompaniesSatyam MishraNo ratings yet
- JCIPDocument5 pagesJCIPdinesh.nayak.bbsrNo ratings yet
- Perturbation MethodsDocument29 pagesPerturbation Methodsmhdr100% (1)