You might also like
- Amplificadores de Pequeña Señal Con BJTDocument20 pagesAmplificadores de Pequeña Señal Con BJTCarlos Jose Rodriguez MartinezNo ratings yet
- Práctica 6 - IntercomunicadorDocument3 pagesPráctica 6 - IntercomunicadorLeonardo LhNo ratings yet
- Compuerta Nand CmosDocument2 pagesCompuerta Nand CmosJulio MarteloNo ratings yet
- Practica Electronica Digital Programacion de Gal22v10Document5 pagesPractica Electronica Digital Programacion de Gal22v10BRAYAN DAVID CARRERO CAÑONNo ratings yet
- Taller3 Tercer Corte-Atmega328pDocument2 pagesTaller3 Tercer Corte-Atmega328pMiguel Ángel Murillo RamírezNo ratings yet
- Análisis Del Lugar de Las Raíces (Root Locus)Document111 pagesAnálisis Del Lugar de Las Raíces (Root Locus)Leonardd ÁdamsNo ratings yet
- Calculo Tanque API 650 2016Document10 pagesCalculo Tanque API 650 2016Elvis Diaz100% (4)
- Wuolah-Free-Asignatura Completa + ExamenesDocument751 pagesWuolah-Free-Asignatura Completa + ExamenesJerson Andres Quintero0% (1)
- Práctica 8 Probador de CristalesDocument5 pagesPráctica 8 Probador de CristalesDiacono10No ratings yet
- Labo Cel 200Document4 pagesLabo Cel 200Danna MarcaNo ratings yet
- Reporte 1 Control DigitalDocument11 pagesReporte 1 Control DigitalGrace Saili Vazquez GasparNo ratings yet
- Practica 5 MicrocomputadorasDocument6 pagesPractica 5 Microcomputadorasanon_213342824No ratings yet
- Camara Sanitizadora IOT UTADocument19 pagesCamara Sanitizadora IOT UTAEIEENo ratings yet
- Apuntes Del Microprocesador 8085 2017 ED15Document114 pagesApuntes Del Microprocesador 8085 2017 ED15MEKArot100% (1)
- Proyecto Control 2 Filtro Pasa BajosDocument13 pagesProyecto Control 2 Filtro Pasa BajosNatanael GarcíaNo ratings yet
- Manual Proteus (Simulador de Circuitos)Document10 pagesManual Proteus (Simulador de Circuitos)Mauricio AguilarNo ratings yet
- Curso ONIK FPGAs VHDL v1p0Document8 pagesCurso ONIK FPGAs VHDL v1p0Lio SnNo ratings yet
- Lab2580 6 12019 PDFDocument3 pagesLab2580 6 12019 PDFMichael pabloNo ratings yet
- Lab Nº3 - Corte y Saturación - 2011-IDocument2 pagesLab Nº3 - Corte y Saturación - 2011-IBruno Adolfo Castillo SoteloNo ratings yet
- Compuertas LogicasDocument27 pagesCompuertas Logicaszzzxxx666No ratings yet
- Tutorial Verilog V1 PDFDocument15 pagesTutorial Verilog V1 PDFNeTSk8No ratings yet
- Carga Descarga CondensadorDocument9 pagesCarga Descarga CondensadorPaul NarvaezNo ratings yet
- Informe Espejos de CorrienteDocument4 pagesInforme Espejos de CorrienteIvan Andres MuñozNo ratings yet
- Decodificador DAC0800Document4 pagesDecodificador DAC0800COBRACAN2208No ratings yet
- Tesis de Ingenieria de Rodrigo Jiménez LópezDocument199 pagesTesis de Ingenieria de Rodrigo Jiménez LópezRodrigoJiménez100% (4)
- Microncontroladores - PICDocument52 pagesMicroncontroladores - PICBenji Cristiá Lira100% (1)
- MOCDocument8 pagesMOCJhonson VasquezNo ratings yet
- Practica Algebra de Boole Esime ZacatencoDocument5 pagesPractica Algebra de Boole Esime Zacatencobarr1No ratings yet
- ALU Expandida Con VHDLDocument14 pagesALU Expandida Con VHDLArmando GaviriaNo ratings yet
- Tema 1 - Introduccion Verilog FPGA 06-Febrero-2016 PDFDocument109 pagesTema 1 - Introduccion Verilog FPGA 06-Febrero-2016 PDFdwdNo ratings yet
- Informe de Luces Variables TerminadoDocument7 pagesInforme de Luces Variables TerminadoGustavo QCondezo100% (1)
- BBBBBDocument11 pagesBBBBBcobra1962No ratings yet
- PRACTICA 2 Comunicaciones Analogicas Chavez MalenaDocument5 pagesPRACTICA 2 Comunicaciones Analogicas Chavez MalenaVázquez García Naomi QuetzalliNo ratings yet
- Circuito de CronometroDocument5 pagesCircuito de CronometroTomas Ignacio ScagliottiNo ratings yet
- Display de 7 Segmentos y Contador Del 0 Al 9Document5 pagesDisplay de 7 Segmentos y Contador Del 0 Al 9Hévy PsicodeliaNo ratings yet
- Practicas Electronica DigitalDocument52 pagesPracticas Electronica DigitalFreed Herdez100% (1)
- Circuitos de Primer Orden RL y RCDocument3 pagesCircuitos de Primer Orden RL y RCDaniel Nuñez MalpartidaNo ratings yet
- Prácticas Líneas de TransmisiónDocument10 pagesPrácticas Líneas de TransmisiónManu de La CruzNo ratings yet
- Guia 2 de Circuitos Electronicos II 2018Document5 pagesGuia 2 de Circuitos Electronicos II 2018Anonymous IF6VmhNo ratings yet
- Electronica Teoria de Circuitos BoylestadDocument11 pagesElectronica Teoria de Circuitos BoylestadBolivar Gavilanez AcostaNo ratings yet
- 13 Tipos de Funciones MatemáticasDocument47 pages13 Tipos de Funciones MatemáticasJimmy Alexander Muñoz ForeroNo ratings yet
- Grupal Final 2.docx1Document20 pagesGrupal Final 2.docx1koNo ratings yet
- Instructivo de Configuración RSTPDocument13 pagesInstructivo de Configuración RSTPWillian PalacioNo ratings yet
- Multiplex OresDocument17 pagesMultiplex Oresyouacrazy100% (1)
- Amplificador Diferencial ComplejoDocument5 pagesAmplificador Diferencial ComplejoGerardo Vázquez CárcamoNo ratings yet
- LAB 3 - Registros y Transferencia Datos - 2016-2 PDFDocument5 pagesLAB 3 - Registros y Transferencia Datos - 2016-2 PDFjaimeNo ratings yet
- Puertas LogicasDocument6 pagesPuertas LogicasJose luisNo ratings yet
- Cuestionario - Correcion MrojasDocument2 pagesCuestionario - Correcion MrojasMilton Ricardo Rojas LunaNo ratings yet
- ELECTRONEUMÁTICA MetodosDocument10 pagesELECTRONEUMÁTICA MetodosNicolas Delgado SaavedraNo ratings yet
- Practica2 Elect 1Document13 pagesPractica2 Elect 1Angel David GutnamiasNo ratings yet
- Instrucciones Aritmeticas At89s52Document8 pagesInstrucciones Aritmeticas At89s52ElBuenDany0% (1)
- SQLDocument2 pagesSQLWilliam QuintuñaNo ratings yet
- Expansor Stereo de Seal de Audio de 1 Entrada A 4 Salidas Ladelec 219Document1 pageExpansor Stereo de Seal de Audio de 1 Entrada A 4 Salidas Ladelec 219Lucas LuchiniNo ratings yet
- Ex 3 de Tele 3 2019Document1 pageEx 3 de Tele 3 2019Diego LazoNo ratings yet
- Test de Electrónica AnalógicaDocument9 pagesTest de Electrónica AnalógicaMiguel PantojaNo ratings yet
- Montaje 2 Circuitos de Muestreo de SeñalDocument4 pagesMontaje 2 Circuitos de Muestreo de SeñalAlonsoMendozaNo ratings yet
- Practica 3Document8 pagesPractica 3Andrea Alexandra Trujillo OrellanaNo ratings yet
- Programa para Llenado de TanquesDocument16 pagesPrograma para Llenado de TanquesDavidVX25No ratings yet
- Sistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosFrom EverandSistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosNo ratings yet
- Espectro Electromagnetico de FrecuenciasDocument6 pagesEspectro Electromagnetico de FrecuenciasUlises EscarcegaNo ratings yet
- Formulario #1 Examen Parcial 2015Document7 pagesFormulario #1 Examen Parcial 2015Ulises EscarcegaNo ratings yet
- Guía de Estudio # 1 (Nov 2015) PDFDocument5 pagesGuía de Estudio # 1 (Nov 2015) PDFAnonymous DCjTXzqVNo ratings yet
- Practica 4 MicrocontroladoresDocument2 pagesPractica 4 MicrocontroladoresUlises EscarcegaNo ratings yet
- Tipos de SuperSacosDocument4 pagesTipos de SuperSacosbenru29No ratings yet
- Ot200291 Iflu MaterialesDocument13 pagesOt200291 Iflu MaterialesMiguel Tolentino LopezNo ratings yet
- ENSAYO. Sobre Plusvalía Wilson ArredondoDocument8 pagesENSAYO. Sobre Plusvalía Wilson ArredondoIng. Luis Fernando Restrepo0% (1)
- Gran Turismo 5Document36 pagesGran Turismo 5eoyjulioeoy100% (3)
- Corporacion Andina de FomentoDocument12 pagesCorporacion Andina de FomentoSamuel Ruiz ColloviniNo ratings yet
- Informe de Alta Tension de La Visita Tecnica A Qenqoro de Fernando Lozano IncaDocument26 pagesInforme de Alta Tension de La Visita Tecnica A Qenqoro de Fernando Lozano IncaFernando LozanoNo ratings yet
- Reglamento BoleteriasDocument13 pagesReglamento BoleteriasbellakatherynNo ratings yet
- PPTs Gerencia Sem 1-3Document164 pagesPPTs Gerencia Sem 1-3Leonel GarciaNo ratings yet
- APUNTES D.Notarial y Registral - FASE II-protegido - UnlockedDocument31 pagesAPUNTES D.Notarial y Registral - FASE II-protegido - UnlockedJheremy Beizaga PazNo ratings yet
- Intro A Simulink PDFDocument23 pagesIntro A Simulink PDFNelson Ubaldo Quispe MNo ratings yet
- Ley de La Juventud y ReglamentoDocument40 pagesLey de La Juventud y ReglamentoMaribel RamosNo ratings yet
- Tema 47Document28 pagesTema 47jpolo3No ratings yet
- Defectologia en SoldaduraDocument16 pagesDefectologia en SoldaduraVladimir Cárdenas GómezNo ratings yet
- ST334U - Tarea Domiciliaria - 2019IDocument11 pagesST334U - Tarea Domiciliaria - 2019Igeorgio webNo ratings yet
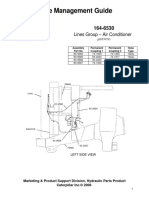
- Hose Management Guide: SN: 2Bw Lines Group - Air ConditionerDocument69 pagesHose Management Guide: SN: 2Bw Lines Group - Air ConditionerlhNo ratings yet
- Guia Manejo de Residuos BiologicosDocument31 pagesGuia Manejo de Residuos BiologicosPatt CarvelNo ratings yet
- Clasificación de PilotesDocument14 pagesClasificación de PilotesKaren Yuly Hilares SuelNo ratings yet
- Porcelanato Hatteras Gris Ficha TecnicaDocument2 pagesPorcelanato Hatteras Gris Ficha TecnicaDANIEL T QUINTERONo ratings yet
- Globalizacion 5to AñoDocument4 pagesGlobalizacion 5to AñogeodaianagomezNo ratings yet
- Laboratorio 4 Circuitos IIDocument14 pagesLaboratorio 4 Circuitos IIAbelardo Jozhitoh LokitohNo ratings yet
- Bitacora de Visita A EstadíaDocument6 pagesBitacora de Visita A EstadíaNereida AzucenaNo ratings yet
- Técnicas de ExposiciónDocument2 pagesTécnicas de ExposiciónDonald Hamilton Aguilar ZavaletaNo ratings yet
- Mapa de Riesgos - V4Document11 pagesMapa de Riesgos - V4sarelyNo ratings yet
- Caso II - JUSSPAULETTEDocument3 pagesCaso II - JUSSPAULETTEJUSSPAULNo ratings yet
- Matriz de Competencias TransversalesDocument3 pagesMatriz de Competencias Transversalesdemetrio pari zuritaNo ratings yet
- Programa de America III, IES Marchetti.Document6 pagesPrograma de America III, IES Marchetti.Victor BarriosNo ratings yet
- 02 Ejercicio Riesgo de LiquidezDocument4 pages02 Ejercicio Riesgo de LiquidezGuillermo Jose MansillaNo ratings yet
- Ept - Semana 1Document2 pagesEpt - Semana 1yna100% (1)
- Director de Ugel - FaltasDocument3 pagesDirector de Ugel - FaltasAlberth AlfaroNo ratings yet